
Abstract
Optimization design of spur gear is a complicated work because the performance characteristics depend on different types of decision variables and objectives. Traditional single-objective optimization design of the spur gear always results in poor outcomes relative to other objectives due to objectives’ competition with each other. Therefore, this study works on the spur gear design based on the multi-objective optimization model of elitist non-dominated sorting genetic algorithm (NSGA-II). In the model, gear module, teeth number, and transmission ratio are decision variables, while center distance, bearing capacity coefficient, and meshing efficiency are objectives. Final optimal solutions are picked out from Pareto frontier calculated from NSGA-II using the decision makers of Shannon Entropy, linear programming technique for multidimensional analysis of preference (LINMAP), and technique of order preference by similarity to an ideal solution (TOPSIS). Meanwhile, a deviation index is used to evaluate the reasonable status of the optimal solutions. From triple-objective and dual-objective optimization results, it is found that the optimal solution selected from LINMAP decision maker shows a relatively small deviation index. It indicates that LINMAP decision maker may yield better optimal solution. This study could provide some beneficial information for spur design.
Introduction
Gears are used in a great deal of mechanical devices for transmitting power from one part of a machine to another. 1 The design of gears is highly complicated due to the numbers of variables and constraints that should be taken into consideration, including center distance, bearing capacity, and meshing efficiency, and weight, bending strength, and life span, respectively. Therefore, it is critical to provide a feasible and reliable optimization program for the gears design based on various criteria. 2
Many studies have worked on the single-objective optimization of gears. Savsani et al. 3 used particle swarm algorithms to deal with the problem of weight minimization design of spur gear. The minimum center distance was taken as objective to optimize internal spur gear by Singh et al. 4 Kumar et al. 5 optimized an asymmetric spur gear to improve load bearing capacity through finite element method. The asymmetric profile of gear was formed by two optimization procedures using direct gear design method. 6 Gologlu and Zeyveli 7 developed a preliminary design of parallel-axis two-stage helical gear trains based on minimizing volume. Mao 8 used micro-geometry modification method to optimize a gear for fatigue wear reduction. Bonori et al. 9 optimized the important micro-geometric parameters to reduce the vibration and noise of a spur gear pair. Jing et al. 10 used exact two-dimensional (2D) analytical method to calculate the magnetic field distribution and then to optimize a concentric magnetic gear through considering sinusoidal magnetizations. Due to most of power transmission systems requiring light weight, efficient, and low-cost elements, Tamboli et al. 11 optimized a heavy-duty gear reducer with helical gear pair based on the minimum volume. Rao 12 used teaching learning based optimization (TLBO) and elitist teaching learning based optimization (ETLBO) algorithms to optimize a spur gear train for weight reduction under the contains of bending strength, surface durability, torsional strength, and center distance.
For the gear design, the considered objectives usually compete against each other so that single-objective optimization cannot provide an acceptable result. Therefore, multi-objective optimization methods have been widely applied in the gear design because it allows decision maker to consider trade-offs between the competing objectives. 13 Wei and Lin 14 performed a multi-objective optimization design for a helical gear using finite element method and Taguchi method. Artoni et al. 15 proposed a general algorithm of multi-objective optimization to increase computational efficiency and durability performances. Li et al. 16 carried out the design of a helical gear reducer based on a multi-objective optimization model with the characteristic adjusted by adaptive genetic algorithm and fuzzy controller. Ye et al. 17 established a multi-objective optimization model for tractor’s NGW planetary gear, where the mechanism’s smallest volume and highest efficiency were taken as the objective functions, while reliability conditions of planetary transmission and gears’ fatigue strength, the planetary gear’s tooth configuration conditions, and structural conditions were taken as the constraints. Huang et al. 18 worked on the optimization of three-stage spur gear reduction units in order to minimize volume and maximize surface fatigue life.
Classical multi-objective optimization methods, such as weighted-sum approach, objective programming, and min–max approaches, are inefficient because they need to perform several optimum runs to obtain a group of solutions approximating the Pareto-optimal set. Moreover, all objectives in the classical optimization methods should be kept the same type through converting objective space. Such conversion may cause a difficult to obtain with a uniformly set of weight or preference vectors. 19 Compared to the classical optimization methods, evolutionary algorithms (EAs) seem to be particularly suitable for multi-objective optimization owing to EA can obtain Pareto-optimal set in a single run, and is less vulnerable to Pareto frontier’s shape or continuity. 20 Up to the present, however, few works used EA in multi-objective optimization design of the spur gear.21,22 In this study, we employ a modified version, that is, elitist non-dominated sorting genetic algorithm (NSGA-II) and decision maker to obtain the optimal solutions in multi-objective optimization design of the spur gear .
NSGA-II-based multi-objective optimization
Pareto criteria
Pareto criteria are usually used in modern multi-objective optimization approach. Take dual-objective optimization as an example. If there is no component in an objective vector,

Pareto criteria of a multi-objective optimization.
NSGA-II
Due to the computational complexity of non-dominated sorting genetic algorithm (NSGA) in dealing with non-convex and non-smooth multi-objective optimization problems, Deb and colleagues24–26 proposed NSGA-II incorporating elitism and removing sharing parameters. When non-dominated sorting procedure is running for the NSGA, each individual in population with the size N should be compared with N – 1 individual for objectives with the number M, and thus, the computational complexity is
Step 1: Initialize a parent population of size N in a random way, Pt;
Step 2: Sort the parent population Pt using non-dominated method;
Step 3: Assign a rank value for each individual of the population, which equals to its non-domination level (a bigger rank value typically corresponds to a higher non-domination level);
Step 4: Select some individuals from the parent population Pt based on binary tournament to be processed by crossover and mutation and operations, and finally they became offspring population, Qt of size Z;
Step 5: Combine the parent population Pt and the offspring population Qt, and create a new population Rt of size 2Z;
Step 6: Sort the parent population Rt using non-dominated method, select some individuals from the new population Rt through crowding and elitism operators, and create next generation population Pt+1;
Step 7: Jump to Step 3 and loop until stopping criterion is met.

Flowchart of NSGA-II algorithm.
Decision maker
The function of a decision maker is to select the optimal solution from Pareto frontier obtained from NSGA-II. Many types of decision makers have been applied in practical multi-objective optimization engineering. 27 Three commonly recognized decision makers, including Shannon Entropy (SE), linear programming technique for multidimensional analysis of preference (LINMAP), and technique of order preference by similarity to an ideal solution (TOPSIS), are used in this study.
SE decision maker
SE is also named as “Information Entropy” because it shares some idea from information theory. SE decision maker is able to obtain weights of different objectives. 28 For a decision matrix fij which has n variables and m objectives, Pij showing the probability of variable number i is given by

SE is given by the following formula

where
Then, the weights of different objectives wj can be calculated from

Finally, the optimal solution ifinal is decided by a comprehensive assessment parameter Xi, that is


LINMAP decision maker
The optimal solution ifinal is selected from LINMAP decision maker based on Euclidian distance


where
TOPSIS decision maker
Besides the ideal solution, TOPSIS decision maker also considers the nadir solution. It was first developed by Hwang and Yoon. 30 Euclidian distance of each solution from the nadir solution is expressed as

Therefore, the assessment parameter used in TOPSIS decision maker is defined by

The optimal solution ifinal corresponds to the maximum above assessment parameter, that is

Model formulation
Two-grade spur gear reducer has been widely used in army, factory, and agriculture production, and its structure is shown in Figure 3. In the optimization design, the center distance, bearing capacity coefficient, and meshing efficiency are set as objectives, while the module, tooth number, and transmission ratio are set as variables, as shown in equation (11)

where

Structure of two-grade spur gear reducer.
In order to achieve the design of compact structure, small volume and weight, the center distance is selected as the first objective

In order to satisfy the gear’s intensity and life, the bearing capacity coefficient is selected as the second objective

For reducing error, increasing meshing efficiency can degrade heat release, energy consumption, and pollutant emissions; thus, meshing efficiency is the third objective function

where f is the addendum coefficient and µ is mesh friction coefficient. The formula deduction process for equations (12) to (14) had been detailedly introduced in Xi. 31
The big gear and small gear are made of No. 45 steel with normalizing and quenching–tempering treatment, respectively, and have 240 HBS hardness. In addition, based on gear quality demand as shown in Table 1, the following constraint conditions are put forward, considering the factors, including module, tooth number, transmission ratio, and fatigue strength.
The constraint condition of the module

The constraint condition of the tooth number

The nonintervention between high-speed gears and low-speed bearings

The constraint condition of the transmission ratio

The constraint condition of the fatigue strength. Reducer demands for reliability and lifetime from users can be reflected from fatigue strength of the gear, including beam strength and surface strength

Gear quality demands.

Results and discussion
Table 2 shows the specified parameters of the NSGA-II used in this study. The population, generation, pool size, tour size, and distribution index of crossover and distribution index of mutation are set as 200, 500, 200, 20, and 20, respectively, when the best fitness value is achieved. The ideal, nadir, and optimal solutions for triple-objective (center distance, bearing capacity coefficient, and meshing efficiency) optimization are obtained, as shown in Figure 4. The ideal solution and nadir solution are (197, 810, 0.965) and (75.9, 50.6, 0.957) in coordination, respectively.
Specified NSGA-II options for multi-objective optimization.

AGA: adaptive genetic algorithm; NSGA-II: a modified version, that is, elitist non-dominated sorting genetic algorithm.
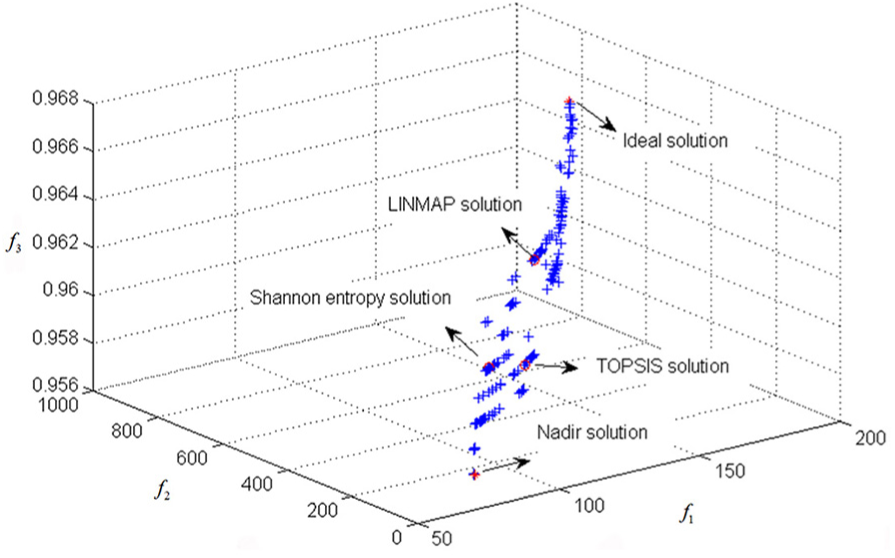
Pareto frontier and optimal solutions for triple-objective
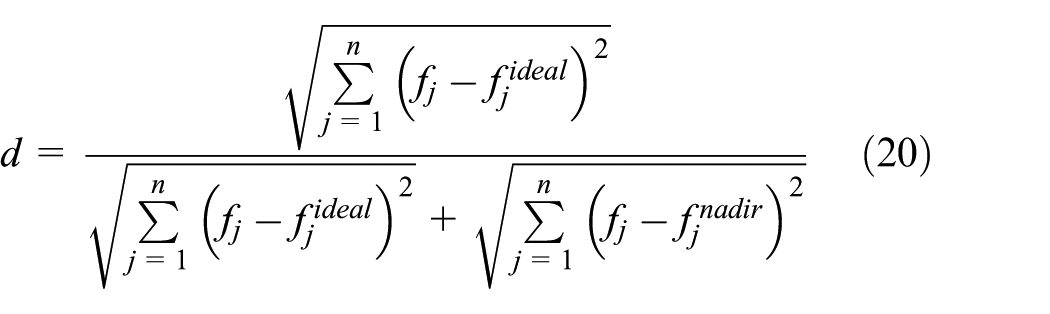
Three optimal solutions selected from SE, LINMAP, and TOPSIS decision makers are compared in Table 3, which are (85.2, 86.7, 0.961), (115, 208, 0.964), and (108, 174, 0.960). In order to evaluate the reasonable status of each optimal solution, a deviation index shown in equation (20) is used to assess/quantify the goodness of the obtained optimal solutions.13,32–34 The higher deviation index relates to more acceptable solutions. The deviation index characterizes deviation of each solution from the ideal solution. The indexes of ideal and nadir denote the corresponding values of objective functions at the ideal and non-ideal points, respectively. As is clear in Table 2, the deviation indexes of 0.2845, 0.2152, and 0.2828 are obtained for the optimal solutions selected from SE, LINMAP, and TOPSIS decision makers. It is noted that the optimal solution obtained based on SE decision maker has the minimum deviation index. Meanwhile, traditional multi-objective optimization method, that is, linear weighted method, was also used to optimize
Comparison between optimal solutions for triple-objective
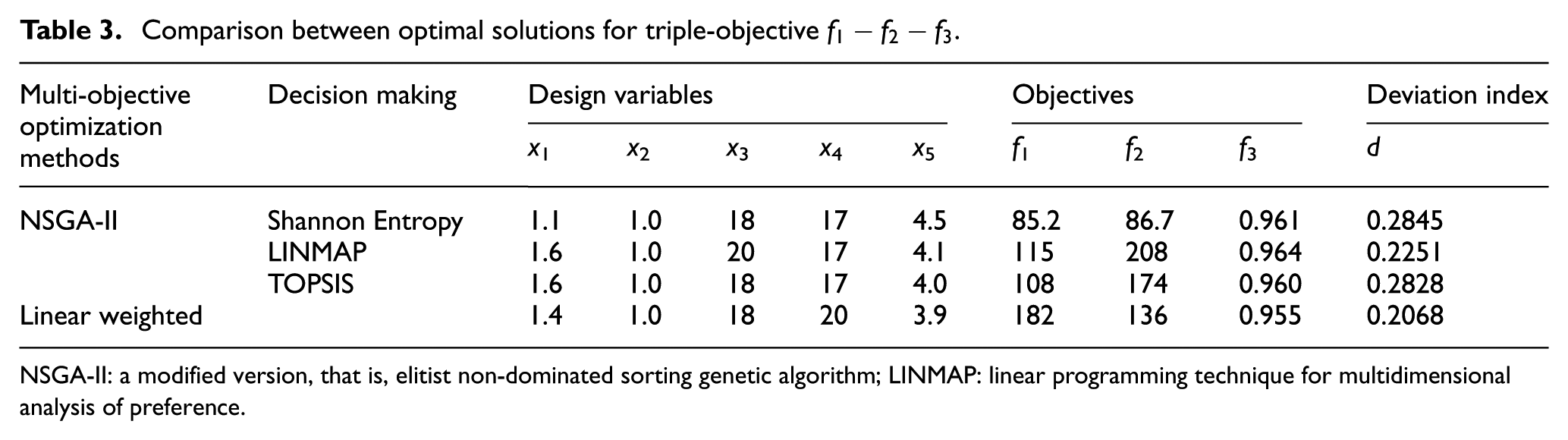
NSGA-II: a modified version, that is, elitist non-dominated sorting genetic algorithm; LINMAP: linear programming technique for multidimensional analysis of preference.
A deviation index shown in following equation has been used in the this study to compared the NSGA-II method.

Figures 5–7 present the ideal, nadir, and optimal solutions in the dual-objective optimizations

Pareto frontier and optimal solutions for dual-objective

Pareto frontier and optimal solutions for dual-objective
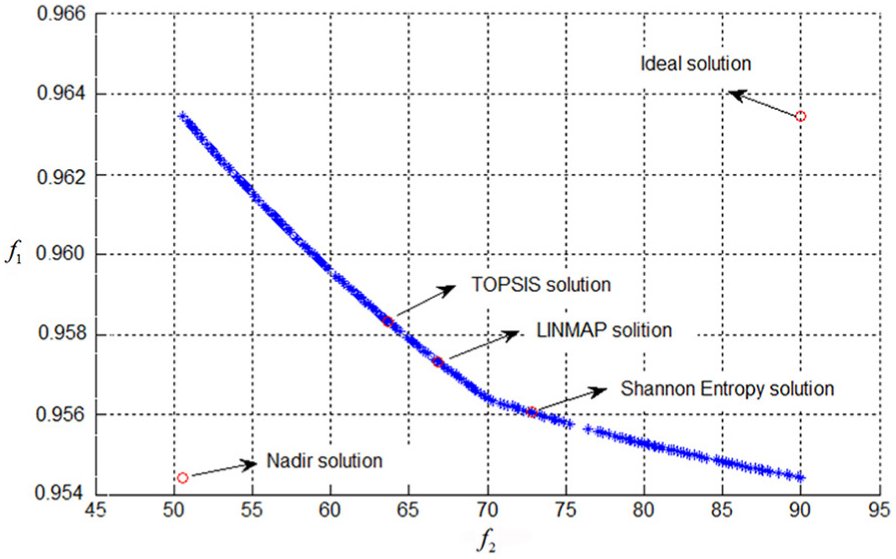
Pareto frontier and optimal solutions for dual-objective
Tables 4–6 compare the optimal results for dual-objective optimizations
Comparison between optimal solutions for dual-objective

LINMAP: linear programming technique for multidimensional analysis of preference; TOPSIS: technique of order preference by similarity to an ideal solution.
Comparison between optimal solutions for dual-objective

LINMAP: linear programming technique for multidimensional analysis of preference; TOPSIS: technique of order preference by similarity to an ideal solution.
Comparison between optimal solutions for dual-objective

LINMAP: linear programming technique for multidimensional analysis of preference; TOPSIS: technique of order preference by similarity to an ideal solution.
Conclusion
The multi-objective optimization of spur gear is performed in this study based on NSGA-II, in which the gear module, teeth number, and transmission ratio are decision variables, and the center distance, bearing capacity, and meshing efficiency are objectives. The optimal solutions in the Pareto frontier got from NSGA-II are selected by SE, LINMAP, and TOPSIS decision makers. In addition, a deviation index is calculated to evaluate the acceptable status of various optimal solutions. From the results in triple-objective and dual-objective optimizations, the optimal solutions selected from LINMAP decision maker have the minimum deviation index. It is indicated that LINMAP decision maker may generate more acceptable optimal solutions.
Footnotes
Handling Editor: Sunday Ojolo
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) received no financial support for the research, authorship, and/or publication of this article.