
Abstract
Efficient perimeter intrusion detection approach is vital to safety management of China high-speed railway. In this article, for high-speed railway perimeter intrusion detection problem, a perimeter intrusion detection framework based on Internet of Things is designed to integrate different detection sensors. A data fusion algorithm was proposed to fuse multisensor data for improving detection precision. Computational results of normal condition and severe weather environment show our approach is effective and efficient for high-speed railway perimeter intrusion detection under Internet of Things, and is significant for safety management of China high-speed railway.
Introduction
In the past decade, high-speed railway had a rapid development in China. At the end of 2017, “four vertical and four horizontal” high-speed railway transportation network has been built with lines in operation amounting to 30,000 km. With the rapid rise of operation mileages, safety management of high-speed railway faces great challenges, especially perimeter security. For the fast operation speed, high departure frequency, and short tracking interval, any invasion of high-speed railway perimeter may cause a large area delay, even serious casualties and economic losses.
At present, different invasions of high-speed railway perimeter have occurred in every year, which bring hidden trouble for safety management of high-speed railway. In order to timely detect these intrusion behaviors, manual inspection and device detection are both adopted. Because of the length of high-speed railway line, manual inspection is only used to assist and verify the information from device detection. The device detection is mainly video surveillance, and many sensors are set along the line of high-speed railway.
Although many sensors begin to detect, current detecting effect of high-speed railway perimeter intrusion is not satisfactory. The false alarm or failure detection largely affects the detection precision. The main problem for high-speed railway perimeter intrusion detection is the isolation of detection sensors, and different types of sensors lack interconnection. So it is necessary to fuse information from different sensors for improving detection precision of high-speed railway perimeter intrusion.
The rest of this article is organized as follows: The relevant literature is reviewed in the next section. The perimeter intrusion detection approach is introduced and compared in “Perimeter Intrusion Detection Approach” section. Detection framework based on Internet of Things is designed in “Detection Framework Based on Internet of Things” section. A data fusion algorithm is proposed in “Data Fusion Algorithm Under Internet of Things” section. Experimental results are reported in “Computational Experiments” section and finally “Conclusion” section covers the conclusion.
Literature review
Data fusion is the process of integrating multiple data sources to produce more consistent, accurate, and useful information than that provided by any individual data source. 1 This method was first used in military field to evaluate battle situation, assist tactical, and strategic decision making. 2 With sensors widely used in civil filed, data fusion becomes to adopt in multisource image reconstruction, 3 robot and intelligent instrument system, 4 image analysis and process, 5 and moving object detection and tracking. 6
For intrusion detection, a survey was present of intrusion detection systems (IDSs) research efforts for Internet of Things, and its objective is to identify leading trends, open issues, and future research possibilities. 7 An image-based intelligent intrusion detection system (IIDS) with a virtual fence was proposed, which can active intruder detection, classification, tracking, and motion recognition. An integrated acquisition device was manufactured combining optical and thermal cameras to compensate for the disadvantages of optical cameras, which have difficulty detecting an intrusion at night, under adverse weather conditions, and when the intruder is camouflaged. 8 An IDS implemented using Fiber Bragg Grating (FBG) sensors was reported, which is conceived to protect the perimeter of an area from unauthorized accesses to railways assets. The proposed sensing system was a powerful tool to detect intruders, especially in real scenarios where protection fences are not practicable. The proposed IDS represents a valuable solution to improve railway security. 9 A framework to properly distribute IDS tasks was provided considering security requirements and variable availability of computing resources. A novel approach was proposed, which promotes the integration of personal and enterprise computing resources with externally supplied cloud services, in order to handle the security requirements. 10 An innovative intelligent IDS was analyzed and applied. The system was systematically designed through network topology, consisting of Infrared Image Collection and Pre-processing Module, Data Transmission Module, Intelligent Analysis, and Automatic Alarm Module. 11 In order to develop an efficient, accurate, and richly functional intrusion discrimination scheme in the optical fiber perimeter security, a fully modeling-based scheme for the Dual Mach-Zehnder interferometry (DMZI) vibration system was proposed. In this scheme, data modeling is applied in both the feature extraction stage and the pattern classification stage. 12 A novel armored-cable-based FBG security fence for perimeter intrusion detection with higher performance was proposed and demonstrated. The sensor is based on a unique armored-cable packaged FBG sensor array, which guarantees high sensitivity, crush resistance, and protection against rodents. 13
According to literature review above, current studies mainly focused on intrusion detection for different application scenarios. Every scenario needs to develop adaptable detection approach according to its characteristic and requirement. In addition, more studies used data fusion technology to fuse multisensor data for improving detection precision. So in this article, based on Internet of Things, we design a detection framework for high-speed railway perimeter intrusion, and a data fusion algorithm is proposed to fuse fiber-optic vibration, video surveillance, and unmanned aerial vehicle detecting data for improving detection precision.
Perimeter intrusion detection approach
Currently, there are several type of approach for perimeter intrusion detection, including vibration cable, leaky coaxial cable, microwave wall, active infrared, ANENC, fiber-optic vibration, video surveillance, and so on. In the following parts, we will shortly introduce and compare these detection approaches to choose appropriate approaches for high-speed railway perimeter intrusion detection.
Vibration cable
Electromagnetic vibration cable is composed of core wire, pressure sensitive film, shielding film, which can detect pressure and deformation. It can be set in metal fence to detect disruptive behavior, such as climbing, crossing, cutting, and so on.
Leaky coaxial cable
Leaky coaxial cable is composed of two leaky cable, one is linked launcher, and the other is linked receiver. It detects intrusion behavior by electromagnetic field, which is created by high-frequency electromagnet wave.
Microwave wall
Microwave wall is composed of launcher and receiver. A microwave field between launcher and receiver can detect perimeter intrusion by Doppler principle, which is a small deviation of microwave signal caused by moving object. The distance between launcher and receiver has an influence for detection precision.
Active infrared
Active infrared is composed of launcher, receiver, beam intensity indicator light, and optical lens. It detects intrusion behavior by the interception of pulse infrared. The configuration of interception time is vital for this approach.
ANENC
ANENC is a type of electronic fence, which works based on the high-voltage pulse on fence. It can adjust detection sensitivity for different security level by input of different impulse voltage.
Fiber-optic vibration
Fiber-optic vibration is worked based on optical interference theory. When the fiber is affected by outside influence, the light characteristic will be changed. The detector can find and locate abnormal situation according to theses changed information.
Video surveillance
Video surveillance system uses image processing technology to detect objects from video streaming, which is collected by cameras. This method can not only detect intrusion behavior, but also view the live or stored video.
For the seven approaches mentioned above, we will compare them from sensors electricity, environmental influence, false alarm rate, hidden, visible, maintainability, installation requirements, and recoverability. The comparison is shown in Table 1.
Comparison of different approaches.
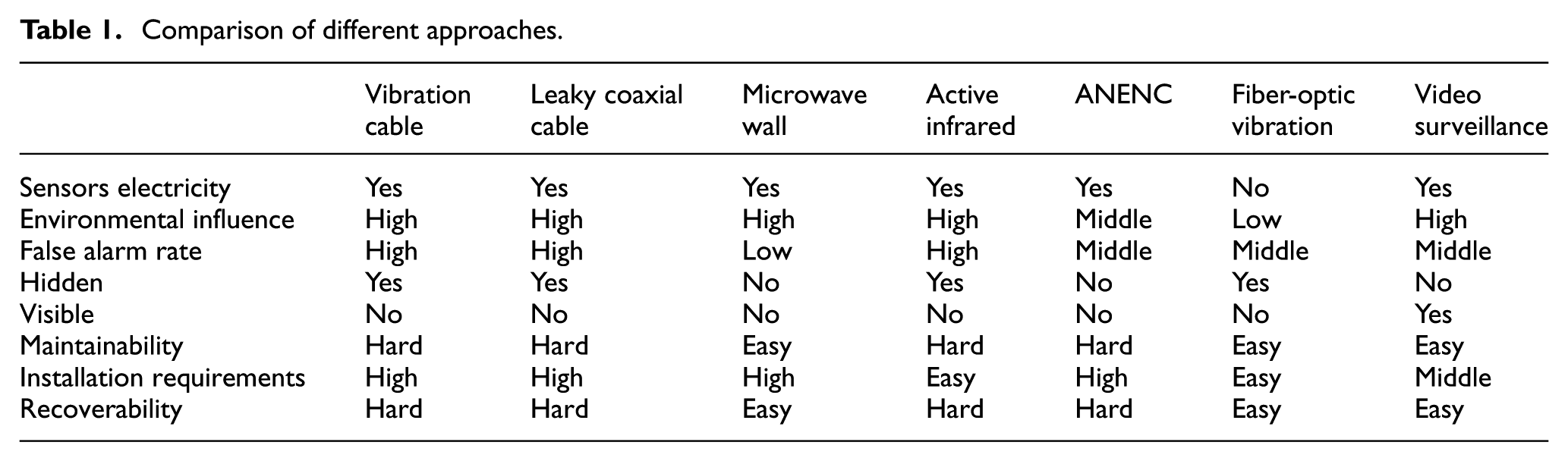
As observed in Table 1, each approach has its characteristic and applicable working environments. Most of the high-speed railway perimeter intrusion detection is set outdoor, the detection precision needs to be high and stable, and front sensors can be easy to install, maintain, and recover. According to the detection requirements for high-speed railway perimeter intrusion, fiber-optic vibration and video surveillance are selected. In recent years, unmanned aerial vehicle technology has been rapid developing; some research groups try to use unmanned aerial vehicle to detect perimeter intrusion behaviors. The unmanned aerial vehicle has great advantage in tour round detection for long railway line. So we choose fiber-optic vibration, video surveillance, and unmanned aerial vehicle as our detection approaches in our detection framework based on Internet of Things. The main contributions of this article are described as follows: First, we add detecting sensors of unmanned aerial vehicle in our detection framework. Second, a detection framework based on Internet of Things is designed. Third, a data fusion algorithm is proposed under Internet of Things for high-speed railway perimeter intrusion detection.
Detection framework based on Internet of Things
For the detection approaches mentioned above, each approach has its advantages and disadvantages for high-speed railway perimeter intrusion detection. Fiber-optic vibration has great performance in adverse weather, such as snow, rain, fog, hard, or dark light. But its sensitive detection sensors may lead to some false alarm, and it cannot detect perimeter intrusion type and accurate position. Video surveillance is easily influenced by environmental influence, such as weather, light, and visibility. But it has great advantages in detecting perimeter intrusion type and accurate position, and staff can view the live video, or any point-in-time from stored video. The unmanned aerial vehicle is a flexible approach, which can rapidly appear on alarm position and track moving objects.
In order to bring each approach’s superiority into full play, we need a platform and a suitable method to fuse detection results obtained by these detection approaches. Only by integrating advantages of these approaches can improve precision of high-speed railway perimeter intrusion detection. The Internet of Things is the network of physical devices, vehicles, home appliances, and other items embedded with electronics, software, sensors, actuators, and connectivity, which enables these things to connect and exchange data,14,15 creating opportunities for more direct integration of the physical world into computer-based systems, resulting in efficiency improvements, economic benefits, and reduced human exertions. 16 The Internet of Things gives high-speed railway perimeter intrusion detection a great integration platform to fuse different detecting approaches. The detection framework based on Internet of Things is designed as shown in Figure 1.

Detection framework based on Internet of Things.
As observed in Figure 1, there are three layers in detection framework based on Internet of things. Each layer is introduced as follows.
Perception layer
Perception layer is the core layer of framework, which is responsible for information acquisition. This layer is mainly composed of two parts. First is the detection sensors, including fiber-optic vibration sensors, fixed cameras, and rotatable cameras. The other is sensors networks, which are composed of these detection sensors. The main task of this layer is to acquire real-time data of detecting area, which may involve intrusion objects information, such as people, animals, falling rook, and so on.
Network layer
Network layer is in the middle of framework, which is responsible for data transmission. This layer is the transmission hub for perception layer and application layer. It is composed of different types of transit network and access Network, including mobile radio communications (3G/4G), Internet, private network, optical fiber web, Ethernet network, and so on. Same type of detection sensors and different types of sensor network are interconnected and interoperated in this layer.
Application layer
Application layer is in the top of framework, which is responsible for data processing. This layer mainly focuses on data computing, processing and mining, and transforming detection data into different types of applications. In our framework, the core task is to fuse detection data from fiber-optic vibration, video surveillance, and unmanned aerial vehicle, and achieve accurate detection for perimeter intrusion type, position, object, track, and so on. So an effective data fusion algorithm is prerequisite for this layer, even the whole framework.
Data fusion algorithm under Internet of Things
In order to improve detection precision of high-speed railway perimeter intrusion, an effective data fusion algorithm is needed, which makes different types of detection approaches to be cross-validated, mutually complemented, and redundant. At present, basic approaches of multisensor data fusion can be mainly divided into two types. The first is stochastic approaches, typical methods including weighted average, Kalman filter, multiple Bayesian estimation, Dempster–Shafer, production rule, and so on. The other is artificial intelligence approaches, typical methods including fuzzy theory, neural network, rough set theory, expert system, and so on.
In the data fusion method mentioned above, neural network is widely used in many fields. Neural network has good fault-tolerance, self-learning, self-organization, and self-adaptability, and can simulate complex nonlinear mapping. These characteristics give neural network a strong nonlinear and uncertainty processing ability, which meets the requirements of multisensor data fusion.
For the high-speed railway perimeter intrusion detection, each detection approaches information has some uncertainty, which requires data fusion method has good performance on uncertain processing ability. So we design a fuzzy neural network as the data fusion algorithm under Internet of Things for perimeter intrusion detection. The basic procedure of the proposed algorithm is shown in Figure 2.

Basic procedure of the proposed algorithm.
In the basic procedure, the main steps are described as follows:
Step 1: Data input. In our procedure, we have three input sources, including fiber-optic vibration, video surveillance, and unmanned aerial vehicle.
Step 2: Data preprocessing. The input data from detecting sensors of fiber-optic vibration, video surveillance, and unmanned aerial vehicle need to be transformed and linearized.
Step 3: Fuzzy neural network. This step is the core of whole algorithm; the network is composed of three layers, which are input layer, fuzzy layer, and output layer. The three layers will be detailed described in the following part.
Step 4: Fusion results output.
We use electrical signals transformed from detection data of fiber-optic vibration, video surveillance, and unmanned aerial vehicle as the input of fuzzy neural network. The whole network can be divided into three layers, including input layer, fuzzing layer, and output layer. The network structure is shown in Figure 3.
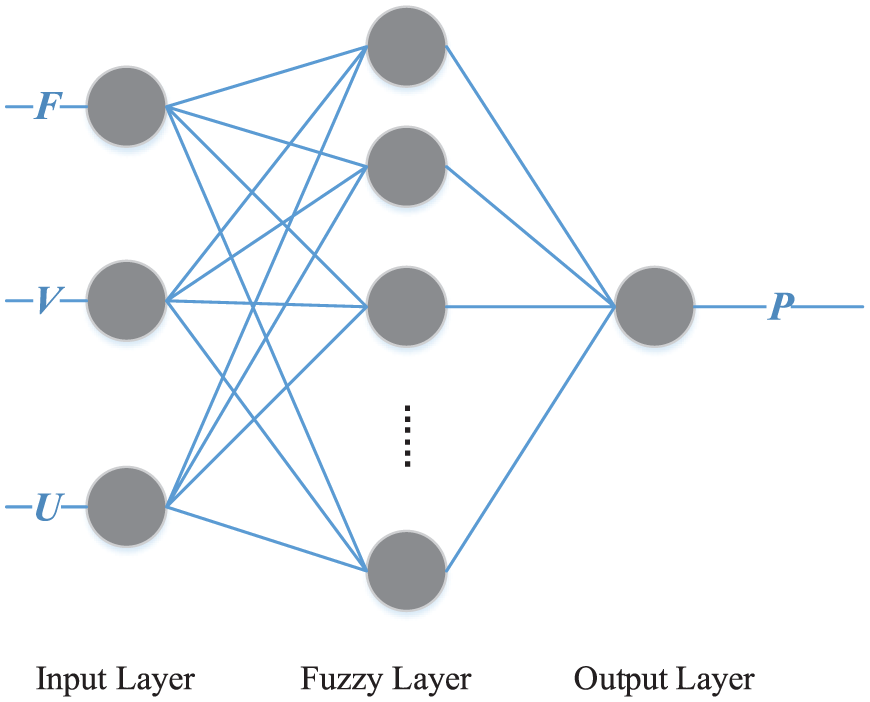
Fuzzy neural network structure.
Input layer
There are three input sources for fuzzy neural network, including fiber-optic vibration, video surveillance, and unmanned aerial vehicle. These input data are transformed and linearized by equation (1).

where
Fuzzy layer
This layer is composed of three main parts. The first is to determine the membership function. We divide the membership into three level, including high (H), middle (M), and low (L). The membership functions are calculated as follows.

where
The second is fuzzy reasoning rules. We have three input sources (F, V, U); each has three statuses (H, M, L) and two output states (
Rule 1: If F, H, U have three H, then state is R;
Rule 2: If F, H, U have three L, then state is S;
Rule 3: If F, H, U have two M and one L, then state is S;
Rule 4: If F, H, U have two M and one H, then state is R;
Rule 5: If F, H, U have two L and one H,
Rule 6: If F, H, U have two L and one H,
Rule 7: If F, H, U have one L, one H, and one M,
Rule 8: If F, H, U have one L, one H, and one M,
Rule 9: If F, H, U have one L, one H, and one M,
Based on the membership functions and fuzzy reasoning rules mentioned above, the third part is fuzzy calculation, and each input variable is calculated as follows.

where j is the node amount of the i layer.
Output layer
According to the calculation in the fuzzy layer, we can obtain high-speed railway perimeter state probability, safety probability is

Computational experiments
To verify the proposed fusion algorithm for high-speed railway perimeter intrusion detection, several computational experiments are implemented. For evaluating the performance of the proposed algorithm, we make a comparison between before and after the fusion. Furthermore, to further evaluate the performance for special environment, experiments on different weather and light are conducted.
The implement time of high-speed railway perimeter intrusion detection is short, so actual detecting data are not enough for experiment, especially unmanned aerial vehicle detection is in study and test stage. So our experiments are implemented on simulation example, which are generated according to actual detecting data analysis.
First, a 30 sample size experiment is conducted, and a comparison is made between before and after the fusion. The detection expectation results and comparison are shown in Table 2 and Figure 4.
Detection expectation results and comparison.


Detection expectation results and comparison.
As observed in Figure 4, before fusion, the 5th, 7th, 11th, 14th, and 23rd samples detecting results are not in accord with the fact. The 5th, 7th, 14th, and 23rd samples detected perimeter intrusion, but in fact, there is no any object in high-speed railway perimeter; they both belong to false alarm. And the eleventh sample does not detect any perimeter intrusion, but in fact, there is some object in high-speed railway perimeter. It belongs to failure in report, which is more serious than false alarm. Before fusion, the detection precision is about 83%. After fusion, these false alarm and failure in report should be avoided. The detection precision of high-speed railway perimeter intrusion has improved after fusion.
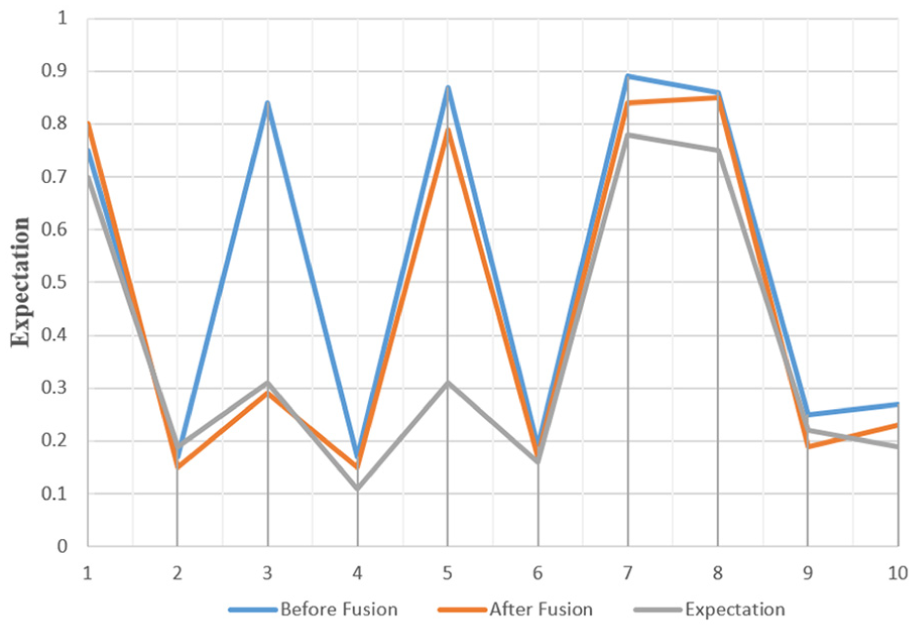
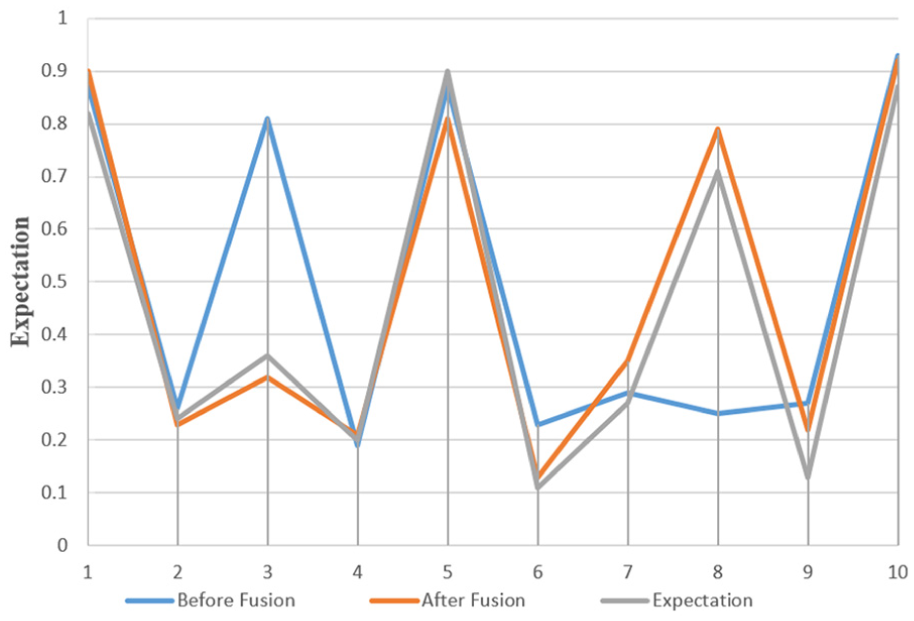
In order to evaluate the performance of our approach for severe weather, samples including snow, fog, dark, and hard light scenes are respectively conducted. The results are shown in Table 3, and Figures 5 –8.
Detection results for severe weather.


Detection results of snow sence.

Detection results of fog sence.
Detection results of dark light.
Detection results of hard light.
As observed in Figures 5–8, the detection precision is obviously lower than normal condition, especially when the expectation is more than 0.3; most of detection results before fusion falsely show there are some objects in high-speed railway perimeter intrusion. Single detection sensors are particularly easy to obtain wrong results under severe weather environment. After fusion, the detection precision has improved, but the fusion detection appears to result in snow sence and dark light. Detection effect of fiber-optic vibration, video surveillance, and unmanned aerial vehicle have a great influence by severe weather environment, which influences the fusion results. In conclusion, our approach is effective and efficient for high-speed railway perimeter intrusion detection under Internet of Things.
Conclusion
In this article, for high-speed railway perimeter intrusion detection, we designed a detection framework based on Internet of Things. A data fusion algorithm was proposed to fuse detection data of fiber-optic vibration, video surveillance, and unmanned aerial vehicle. Computational experiments on normal condition and severe weather environment were implanted. The results showed our approach is effective for high-speed railway perimeter intrusion detection and can prominently improve the detection precision.
In future, the weight value of self-adaption setting of different sensors for different detection environment is the possibility for further research.
Footnotes
Handling Editor: Fei Yu
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by the Fundamental Research Funds for the Central Universities (No. 2017JBM035), the National Key R&D Program of China (No. 2016YFB1200203_02), the State Key Laboratory of Rail Traffic Control and Safety (Contract No. RCS2018ZZ004, Beijing Jiaotong University), and Program of China Railway Corporation (No. 2017T001C).