
Abstract
In view of the shortcomings of traditional hydraulic support system, such as poor mobility and limited range of adjustment, a new configuration with double parallelogram structure is proposed. Combining the kinematic diagram of the mechanism of the new support system and the relevant parameters of the balance moment, using the kinematic vector closed-loop modeling method and D’Alembert’s principle, the relationship equation between the generalized coordinates of the hydraulic support and the geometric position parameters is obtained, and the analysis model with plural-freedom is established. Dynamic response characteristics and natural frequencies of column hydraulic cylinder and balance hydraulic cylinder are analyzed. The results demonstrate that the natural frequencies of the improved balance hydraulic cylinder and column hydraulic cylinder have been greatly improved, and the safety performance of the hydraulic support has been greatly increased.
Keywords
Introduction
As a key device for supporting the top beam and maintaining the safe production in the stope, the hydraulic support can be considered as a complex system that interacts with the surrounding rock.1,2 The stress state of the hydraulic support depends on the relationship between the external mine pressure and the internal forces. 3 To understand the coupling relationship between the surrounding rock and the hydraulic support, a specific research of the dynamic characteristics is of great significance.
Many scholars have studied the hydraulic support system. Yang et al. 4 designed a new hydraulic support based on the kinematics modeling and simulation of the mechanism analysis of the bracket. Wang and colleagues5–7 analyzed the mechanical characteristics of the elastic beam of the hydraulic support, the trajectory of parts, and the structural optimization design. Liang et al. 8 researched the force transfer characteristics of hydraulic support under impact loading. Using the AMESim software, the hydraulic system model of roadway rapid support equipment is built by Xu et al. 9 The curves of the displacement, speed, and acceleration characteristic of the piston rod in the working process are calculated. Oblak et al. 10 optimized the two sets of parameters of hydraulic support in mining industry based on mathematical programming method. Prebil et al. 11 used the global optimization method and adaptive mesh refinement algorithm to determine the optimal connecting rod length in the hydraulic support mechanism.
The above research works mainly focus on the statics and kinematics analysis and do not involve dynamic analysis. As the mechanical vibration in hydraulic support device may cause the resonance and fatigue, the analysis of natural frequency will avoid unnecessary loss caused by the resonance.12–14 Through the dynamic modeling of the hydraulic support, the dynamic response and frequency spectrum of hydraulic support under the external excitation are analyzed, which provides the theoretical basis for the design of the hydraulic support.
Working principle and simplification of hydraulic support
Working principle of hydraulic support
As the main safety support device for coal mining, the hydraulic support can not only support and control the roof beam, maintain the safe underground working space, but also enable the mechanization pass of other related equipment. The three-dimensional model of the traditional hydraulic support is shown in Figure 1(a), consisting of top beam, column hydraulic cylinder, shield beam, balancing hydraulic cylinder, and support floor. During the coal mining process, the piston’s movement of column hydraulic cylinder causes the top beam to be supported. When the balancing hydraulic cylinder is working, the adaptability of support to the unstable top beam is improved. In addition, when the support system is in unloading and semi-unloading state, the angle of the top beam is adjusted to make the support system in a proper working condition.

Three-dimensional model: (a) traditional hydraulic support and (b) improved hydraulic support.
In the traditional hydraulic support system, the top beam is a kind of plural-freedom structure. Its mobility is poor and the adjustment range is limited. A new support configuration, as shown in Figure 1(b), is proposed by setting the concentrated force load mechanism above the top beam, using the configuration of the palletizing robot to change the top beam motion. The new hydraulic support is composed of two parallel quadrangles. Thus, the moving range of the column nest is more extensive. The driving mode is close to the palletizing plural-freedom robot. The piston of the column hydraulic cylinder moves and supports the top beam. The improved device improves the reliability of the top beam and also improves the ability of the support system to bear horizontal force. In addition, the shield beam can prevent the broken rock from entering the supporting working space.
Model of hydraulic support
To analyze the dynamic response characteristics of the improved hydraulic support, it is necessary to simplify the hydraulic support. The coupling model between improved hydraulic support and surrounding rock is shown in Figure 2. The simplified diagram of hydraulic support mechanism is shown in Figure 3. When the dynamic model is established, the length of balance hydraulic cylinder

The coupling model between improved hydraulic support and surrounding rock.

The simplified diagram of hydraulic support mechanism.
The physical meaning of the other parameters is shown in Table 1. The related parameters at the equilibrium position are as follows:
Physical meaning of each parameter.

As shown in Figure 4, the shield beam of the hydraulic support can be considered as a parallelogram structure. Its equivalent mass can be calculated by center-of-mass motion theorem and torque equilibrium equation.

The schematic of the parallelogram structure.
In the shield beam,

In equation (1),

In equation (2),


In equations (3) and (4),

In equation (5),
The equivalent moment of inertia of the parallelogram structure can be indicated as

In equation (6),

In equation (7),
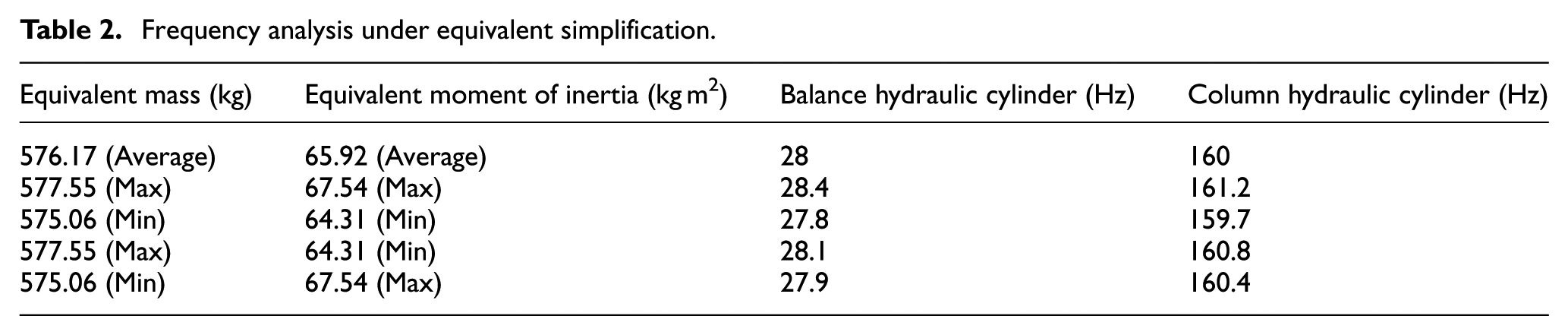
As shown in Table 2, the equivalent mass of the shield beam is changing from 575.06 to 577.22 kg, and the average value is 576.17 kg; the equivalent moment of inertia is changing from 64.31 to 67.54 kg m2, and the average value is 65.92 kg m2. The equivalent simplification has little affection on frequency analysis.
Frequency analysis under equivalent simplification.
Dynamics mathematical model
The relationship between the angular velocity and generalized coordinates
According to the kinematic vector closed-loop modeling method,15,16 one can obtain
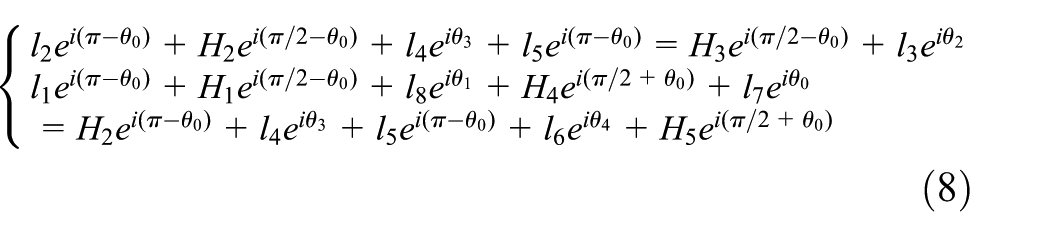
Derivation of equation (8)

Substituting the value of each parameter into equation (9), it can be obtained

System kinetic energy




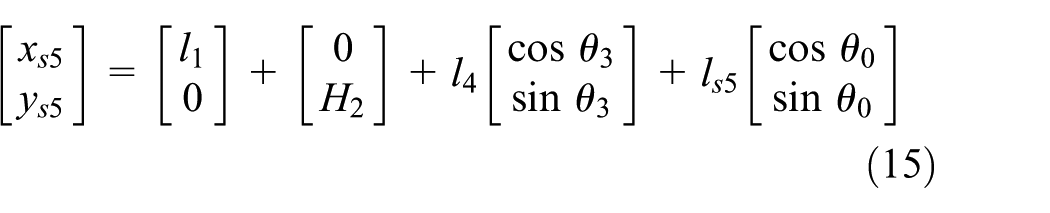

where si is centroid of each component. By deriving the above formula and substituting the parameters, we can get






Now, the kinetic energy is

Substituting equations (17)–(22) into equation (23), one can obtain

where
System potential energy
The potential energy is

where
Generalized force of the system
The point coordinates of the external excitation force are as follows
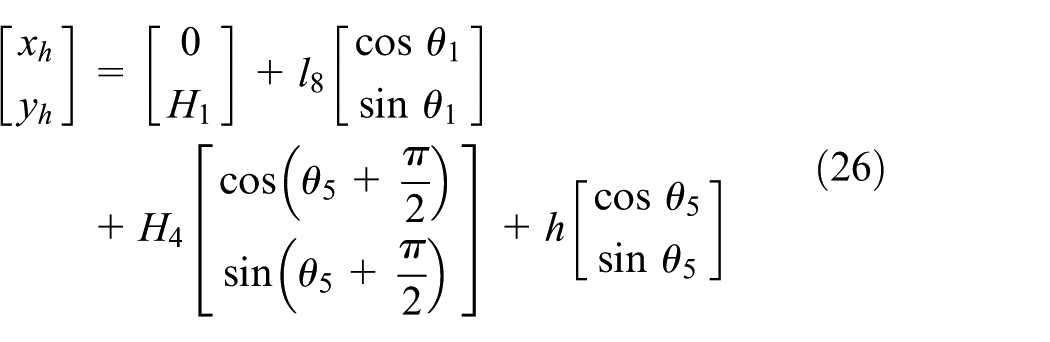
Derivation of equation (26) and substitution of parameters can be obtained

The instantaneous power of the generalized force is as follows
where f is the magnitude of external load, and h is the distance from the external load to column nest.
Simulation solutions
According to D’Alembert’s principle, one can obtain

Substituting equations (25) and (27) into equation (29), one can obtain


Substituting the parameters into the above equations


Combining equations (32) and (33)

In MATLAB, equation (34) is solved using the fourth-order Runge–Kutta method. In the process of solving, auxiliary variables are introduced.

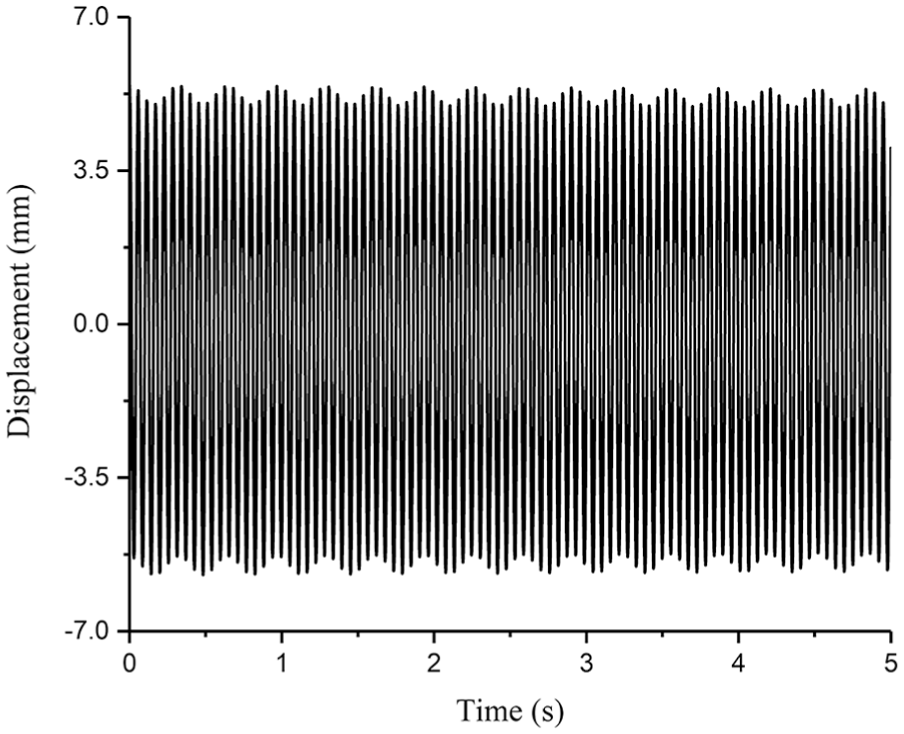
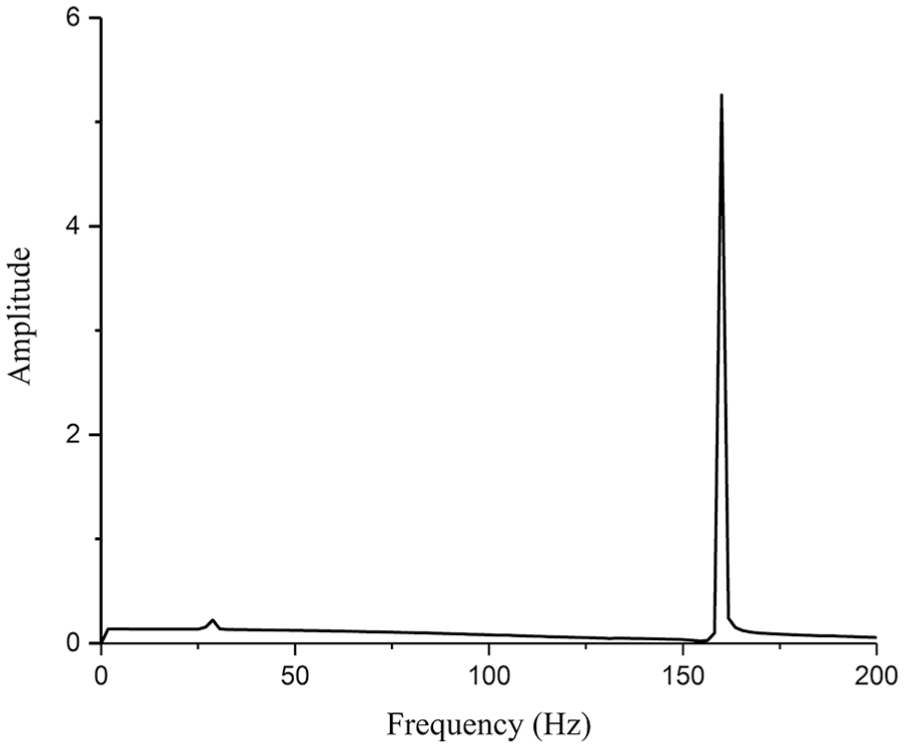
The displacement response curves of the balance hydraulic cylinder and column hydraulic cylinder are shown in Figures 5 and 6. In Figures 5 and 6, the maximum displacements of balance hydraulic cylinder and column hydraulic cylinder are 6.07 and 5.45 mm, respectively. The frequency spectrograms are shown in Figures 7 and 8. From the diagram, the natural frequencies of the balance hydraulic cylinder and column hydraulic cylinder are 28 and 160 Hz, respectively. In the traditional hydraulic support model, the natural frequency of the balance hydraulic cylinder is 10 Hz and the frequency of the column hydraulic cylinder is 17 Hz, which greatly improves the safety performance of the hydraulic support.

Displacement response of balance hydraulic cylinder.
Displacement response of column hydraulic cylinder.

Frequency spectrograms of balance hydraulic cylinder.
Frequency spectrograms of column hydraulic cylinder.
Conclusion
A novel hydraulic support with a configuration of double parallelogram structure is proposed in this article. The new design can decouple the support movement in X and Y directions. That allows the top beam to move along X or Y direction individually. On the contrary, the contact angle between the roof and the jack is determined by the coupling relationship of the traditional support structure. Thus, it is difficult to realize fully contact. Under unstructured roof conditions, the traditional support can only contact the roof fully in one state, while the new design can contact the roof fully in several states due to the separate movement along X and Y directions.
The relationship equation between the generalized coordinates of the hydraulic support and the position parameters of the mechanism is established using the kinematic vector closed-loop modeling method and D’Alembert’s principle. And the analytical model of the plural-freedom hydraulic support dynamics is carried out. The following results are obtained:
The maximum displacement response of the balance hydraulic cylinder is 6.07 mm, and the maximum displacement response of the column hydraulic cylinder is 5.45 mm.
The natural frequency of the balanced hydraulic cylinder and column hydraulic cylinder is 28 and 160 Hz, respectively. Compared with the 10 Hz of the balance hydraulic cylinder and 17 Hz of the column hydraulic cylinder in the traditional hydraulic support, the natural frequency is greatly increased, and the safety performance of the hydraulic support is greatly improved.
Footnotes
Handling Editor: Pietro Scandura
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by the National Program on Key Basic Research Project of China (973 Program) (grant no. 2014CB046302).