
Abstract
With a view to the background of Internet of Things, the vehicle group situation, especially the propensity of different drivers, and the corresponding vehicle types were given a comprehensive consideration on the basis of the factors which influence driving behavior, and the drivers’ lane selection model based on multi-player dynamic game with complete information was built. The drivers’ payoffs under different combination of lane selection strategies were analyzed, and on this basis, the subgame perfect Nash equilibrium solution was solved through backward induction, and the drivers’ optimal lane selection strategy was obtained. Next-Generation Simulation datasets and other data were applied for model calibration and validation. The results showed that the proposed model can objectively reflect the actual operation characteristic of traffic flow on road section. So, it is of great significance to apply the multi-person dynamic game in the field of intelligent transportation. And the theoretical basis of the research on lane selection decision-making can be provided for the command system of intelligent driving especially anthropomorphic driving under the condition of Internet of Things.
Keywords
Introduction
With the rapid development of the transportation industry, the car ownership has increased rapidly. The contradiction among people, vehicle, and environment has become increasingly conspicuous, and the traffic safety is becoming more and more serious. Lane changing is one of the main factors affecting traffic safety, and lane selection which needs drivers to analyze all kinds of information and consider a variety of factors in an instant is an important part of lane changing, and the rationality of lane selection is directly related to driving safety. The multi-source information of people–vehicle–environment can be collected and shared through Internet of Things, which can provide decision-making basis for driver’s lane selection process and improve the active safety of driver and vehicle. Therefore, it is of great practical significance to deeply study the lane selection behavior under the condition of Internet of Things, and it can provide a theoretical basis for the lane selection research of intelligent driving, especially the anthropopathic driving.
On the research of lane-changing model, Gipps 1 built a lane-changing model which was intended to cover the urban driving situation, where traffic signals, obstructions, and heavy vehicles all exert an influence. Q Yang and HN Koutsopoulos 2 classified the lane changing as either discretionary or mandatory.T Toledo 3 introduced an integrated driving behavior model which comprehensively considered these two kinds of lane-changing situations, and they were combined during the process of lane selection. The utility evaluation function was used to obtain the related influencing factors. JP Wu and colleagues4,5 described a fuzzy logic motorway simulation model which included lane change to offside and lane change to nearside. The premise variables of lane change to nearside were pressure from rear and gap satisfaction in the nearside lane, and the premise variables of lane change to offside were overtaking benefit and lane-changing opportunity. Hidas 6 introduced Simulation of Intelligent TRAnsport Systems (SITRAS), a massive multi-agent simulation system in which driver–vehicle objects are modeled as autonomous agents. And the lane change is feasible if the deceleration (or acceleration) required for the subject vehicle to move behind the new leader vehicle is acceptable and the deceleration required for the new follower vehicle to allow the subject vehicle to move into the lane is acceptable. XY Wang et al. 7 constructed a lane-changing model, which considers the time-varying driving propensity through analyzing the psycho-physic characteristics of drivers.
Driving on the road is a dynamic game process. YL Zhang 8 proposed a discretionary lane-changing model based on Stackelberg game and studied the game process of the target vehicle and the following vehicle in the target lane. Intelligent driver model was used to calculate the acceleration of the target vehicle and the deceleration of the following vehicle, and the calculation results were regarded as their payoffs. Different drivers have different propensities. The lane-changing decision was finally made according to the different threshold of driving payoffs. Simulation results indicated that the drivers’ discretionary lane changing can be reflected through the proposed model. However, the model parameters needed to be calibrated under different traffic situations. H Kita 9 developed a two-person non-zero-sum non-cooperative game theoretical model to describe the interactions of cars in merging or weaving sections, and only the influence of through car on the behavior of a merging car was considered in the analysis. Both the merging and through cars would attempt to take the best actions for themselves by forecasting the others’ action. On the basis of analysis of lane-changing action, a way of building model based on discrete dynamic game was put forward by XM Liu et al. 10 The value of speed expectation and safety expectation of each vehicle were regarded as the probability for different strategies. A Talebpour et al. 11 established a lane-changing model based on two-person non-zero-sum non-cooperation game with complete and incomplete information to analyze the interaction between the target vehicle and the following vehicle which is in the target lane. The best strategy of game player could be obtained through the analysis of strategy space and payoff function. JS Peng et al. 12 discussed a non-cooperative mixed strategy game between the target vehicle and the following vehicle in the target lane and deeply analyzed the payoffs of the players and the Nash equilibrium. The Nash equilibrium solution of the non-cooperative mixed strategy game was codetermined by driving safety, traveling time, and the importance degree of the payoffs. XY Wang et al. 13 assessed the characteristics of various traffic manipulators, vehicles, and drivers to develop a lane selection model of basic urban expressway segments based on mixed fuzzy many-person, multi-objective, non-cooperative games. By analyzing drivers’ profits under different combinations of lane selection behavior, Nash equilibrium was confirmed in a single game process and optimal lane selection behavior was obtained in a dynamic game. M Wang et al. 14 put forward a predictive approach for unified lane-changing and car-following control based on receding horizon optimal control and dynamic game theory, where discrete lane change decisions and continuous accelerations were evaluated jointly to minimize the payoff function and obtain the Nash equilibrium solution. XY Wang et al. 15 comprehensively analyzed the drivers’ lane selection behavior under the condition of incomplete information and constructed a lane selection model based on phase-field coupling and multi-player dynamic game with incomplete information considering the time-varying character of driving propensity. The means of actual driving experiment, virtual driving experiment, and microscopic simulation of traffic flow were used to verify the model. The verification results showed that the model can objectively reflect the actual operation characteristic of traffic flow on road section and the process of lane selection.
In the existed lane-changing model based on game theory, only the vehicle which was to change lane and the following vehicle in the target lane would be considered to construct the two-person static game model. However, there are little applications of multi-person dynamic game in the intelligent transportation. And the method of using only two-person game is unrealistic, given that there may be multiple vehicles on road. The time-varying dynamic factors such as driving propensity, vehicle group situation and the characteristic of traffic entity were seldom but should be taken into consideration in order to accurately reflect the interaction process of vehicles. To accurately reflect the drivers’ lane selection behavior, the aggregated vehicles driving on the urban expressway were chosen to be the research object and the vehicle group situation was analyzed under the background of Internet of Things. And the lane selection model based on multi-player dynamic game with complete information was constructed. On this basis, the payoffs of every player under different lane selection strategies were calculated, the subgame perfect Nash equilibration was solved, and the drivers’ optimal lane selection behavior was obtained. So, to a certain degree, the research will facilitate the application of multi-person dynamic game in the field of intelligent transportation and it will be of great signification.
Method
Vehicle group situation
Traffic situation refers to the states and situations of all traffic entity deployment and behavior in the drivers’ interest-sensitive area (interest-sensitive area means an area that has a greater impact on vehicle safety and allocates more drivers’ attention), and it contains all the information of traffic entity.14,15 In this article, vehicle group situation which driver can perceive in the interest-sensitive area, including the characteristics of traffic entity and vehicle group relationship, was taken as an example to research the driver’s lane selection behavior.
Definition of vehicle group situation
As shown in Figure 1, the three-lane condition is taken as an example, the target vehicle

Vehicle group situation when target vehicle is located in the middle lane.
Mathematical description of vehicle group situation
The vehicle group situation objectively exists in the whole traffic environment and changes with the dynamic change in the traffic elements. The concept of force in the physics is referenced to describe the interaction of vehicles in each subarea of interest-sensitive area. In the physics, force refers to the interaction between two objects. And similarly, the force between two vehicles also refers to the interaction between them. Namely, if a vehicle has a positive impact on the other vehicle to choose the lane where the vehicle is located, then the force is considered to be an attraction, and the converse effect is defined as repulsion. And the magnitude of the force can be measured through fuzzy logic method. Thus, the vehicle group situation the target vehicle located in can be abstractly described through the set of force.
The fuzzy logic method was used to obtain the force of the vehicle in each subarea on the target vehicle, in which the vehicle type (small, middle, and large), relative distance (danger, near, medium, and far), relative speed (negative large and negative small), and the drivers’ propensity of target vehicle (radical, common, and conservative) were comprehensively considered. The effect size was used to describe the magnitude of force, and the effect size of the greatest repulsion was represented by −1, whereas the effect size of the greatest attraction was represented by 1. One of the typical language fuzzy rules was as follows: if the type of target vehicle is small, the type of left-rear vehicle is small, the relative distance between target vehicle and left-rear vehicle was far, and their relative speed was positive large, and then, the effect size of left-rear vehicle acted on target vehicle was 1. Limited to the space, other fuzzy inference rules of effect size would not be listed here. In the fuzzy logic method, the fuzzy variables, corresponding fuzzy sets, and the calculation of fuzzy subset boundary value can be referenced from the literature. 16
The above method could be used to obtain the force the vehicle received in the interest-sensitive area. Therefore, the force set
Drivers’ lane selection model based on multi-player dynamic game
Game theory can provide a mathematical model for the analysis of situations involving two or more participants and whose decisions would influence their interests. When driving on a multi-lane road, the drivers have the option to keep the lane or change lane (change left or change right) and select the optimum driving lane by analyzing the influence of the sub-area vehicles on their own traffic safety and interests under the consideration of the current driving state. Since the drivers’ lane selection is a process of pursuing interests (such as driving safety, efficiency, comfort, etc.), it is necessary to make complex decisions in the vehicle group situation with mutual influence, so the multi-player dynamic game theory can be referenced to describe the drivers’ lane selection behavior. Because that each vehicle in interest-sensitive area has to consider the influence of the surrounding vehicles and the influence the surrounding vehicles received, the game tree will be too large and the game analysis will be more complex due to the increase in game player and strategy profiles. So, to simplify the game process of drivers, the multi-player dynamic game was divided into multiple two-person dynamic games in this article, namely, the game between target vehicle and the vehicle in each subarea.
In three-lane scene (shown in Figure 1), the target vehicle
Lane selection game between target vehicle and left-rear vehicle.
In the dynamic game, players act at different time, and the player who takes action later can observe the action of the player who takes action before him. Suppose that the target vehicle precedes the rear vehicles and follows the front vehicles to take action. To reduce the complicity of the model construction, it was assumed that the driver of the vehicle in a front position has the priority to select lanes, namely, the vehicle driver in front of the target vehicle driver has the priority to select lanes and the vehicle driver located behind the target vehicle driver will select lanes after the target vehicle driver. The target vehicle precedes the rear vehicles and follows the front vehicles to take action. In the first stage of the game,
The driving payoffs of the drivers can be represented by the difference in the force the vehicle got before and after executing the selected operation for that drivers’ satisfaction on the current driving state depended on the force magnitude the driver perceived that the lane the vehicle located acted on them. Where the lane force included the cumulative force of the two vehicles in front of the vehicle in game and the force of the rear vehicle behind it, the cumulative force referred to the sum of the forces that the front vehicle acted on the vehicle in game and the next front vehicle acted on the front vehicle. Considering that the contribution rate of vehicles located in different areas was different, the contribution rates of vehicle in each subarea the driver with different propensity types perceived could be obtained through the analytic hierarchy process based on the questionnaire survey. The result was shown in Table 1.
Contribution rates from vehicles in each subarea the different propensity-type driver perceived.

In Table 1,
Results
Data processing and model calibration
The Next-Generation Simulation (NGSIM) data set was used to calibrate the model constructed in this article. NGSIM program was initiated by the United States Department of Transportation Federal Highway Administration, and the real-world vehicle trajectory data were collected through the video detection technology. The program developed a core of open behavioral algorithms in support of traffic simulation with a primary focus on microscopic modeling, including supporting documentation and validation data sets, so as to further reflect the traffic behavior objectively.
The vehicle trajectory sets of the section I-80 at the duration of 4:00–4:15 p.m. and the section US-101 at the duration of 7:50–8:05 a.m. were selected to calibrate and validate the model constructed in this article (the selection of the duration on vehicle trajectory sets for the two sections was mainly according to times of lane changing, and the vehicle trajectory sets with more lane-changing times were selected in this article). Where the vehicles running on the lanes with the lane ID 2, 3, and 4 were chosen as study subjects when entering into the data collection area (the most left lane ID was 1 on the driving direction and the number would increase successively to the right). The vehicles in high-occupancy vehicles (HOV) lane and other auxiliary lanes (the driving behavior is different from that in other lanes) and the continuous lane changing (the continuous lane changing is more likely the mandatory lane changing) would not be taken into consideration. Lane distribution diagrams of the studied sections I-80 and US-101 are shown in Figure 3.

Lane distribution diagrams of the studied sections.
Identification of driving propensity
The method in literature17,18 was referenced to identify the driving propensity.
Data processing
Each record of NGSIM trajectory data contains not only the status information of a single vehicle at a moment including the lane driving on, vehicle location, instantaneous speed, and instantaneous acceleration but also the ID of preceding and following vehicle at the current moment. Therefore, the status information of the surrounding vehicle at the current moment and a certain interval moment can be queried according to the combination of video, vehicle ID, and time information. The vehicle type, relative distance, and relative speed in the vehicle group situation can be obatined through the combination of the obtained information, and the microscopic parameters which meet the calculation need of vehicle group situation can be obtained finally. The main microscopic parameters obtained from the data preprocessing of NGSIM are shown in Table 2.
Main microscopic parameters obtained from data preprocessing.

Model calibration
In order to construct a lane selection model which can reflect traffic flow characteristics correctly, the model parameters need to be calibrated and the model needs to be validated. Based on the empirical value and the scientific analysis and process of the vehicle trajectory dataset for I-80 section, the model parameters were calibrated through the repeated training and expert opinion. The calibration of the model parameters is shown in Table 3.
Parameter calibration of lane selection model.

Model solution
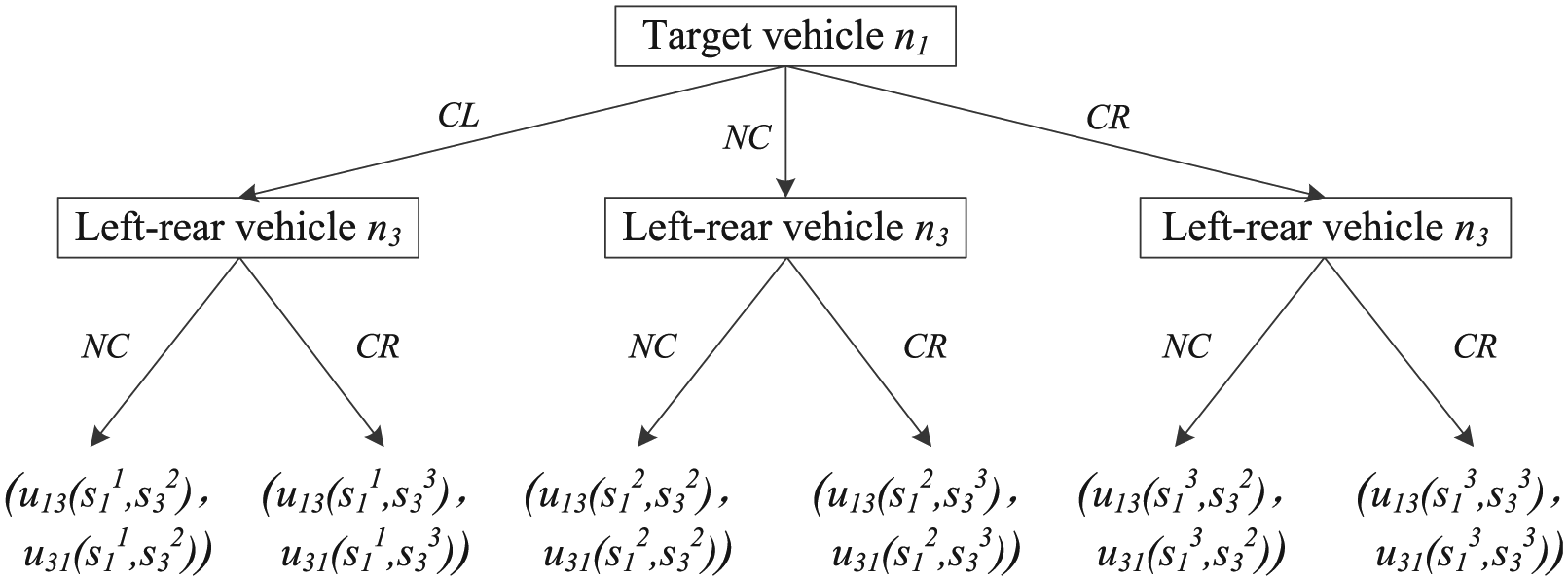
The backward induction can be used to solve the subgame perfect Nash equilibrium of the dynamic game because that each player in game would take the influence of his or her action selection on the players who took actions after him or her into consideration. The idea of this method is to start from the last decision node in the game tree, and the dominated strategy of the player in each decision node would be eliminated every time until the first decision node at the very beginning of the game according to the principle of utility maximization. The game between target vehicle
The game between target vehicle
Similarly, the subgame perfect Nash equilibrium of the dynamic game between target vehicle
Discussions
Model verification
In order to verify the reliability of the model constructed in this article, the traffic data obtained from field survey need to be used to further verify the model. The comparison between the date of field survey and the simulation results was used to judge whether the model can objectively reflect the actual situation of the traffic.
Verification of lane selection model based on NGSIM trajectory data
The vehicle trajectory data of US-101 collected through NGSIM program were used to verify the model. The basic principles to choose the lane of US-101 as the study lane are similar to section “Data processing and model calibration.” Lane selection model based on multi-player game was applied to analyze and process the video information and vehicle trajectory data collected from the studied road section and predict the drivers’ lane selection of the target lanes. The lane changing of vehicle was selected as the index to examine the prediction results of the drivers’ lane selection due to the visibility and observability of vehicles status when driver selected the strategy of CLor CR. The prediction results were compared with the actual lane-changing situations to verify the validity of the model, and the comparison results were shown in Table 4.
Model verification results.

Verification of lane selection model based on actual driving experiment
The urban expressway road section of Yuanshan Road between Xincun West Road intersection and Renmin West Road of Zibo City, Shandong Province was selected as the experimental route. The experiment was conducted between 7:30 a.m. and 9:30 a.m. of normal working day with the good condition of weather and road and the traffic flow was non-free flow. The overall length of the studied road section was 1.2 km, as shown in Figure 4. Based on the video monitoring, 30 drivers with different driving propensities were chosen to conduct the experiment (experimental equipments were shown in Figure 5). During the experiment, the information of road, traffic, and environment was collected and the experimental data were stored. After the experiment, the lane selection model based on multi-player game was used to analyze and process the collected data. The effectiveness and validity of the model could be judged through comparing the prediction results with the actual lane selections recorded in the video. The results of actual driving experiment were shown in Table 5.

Experimental route.
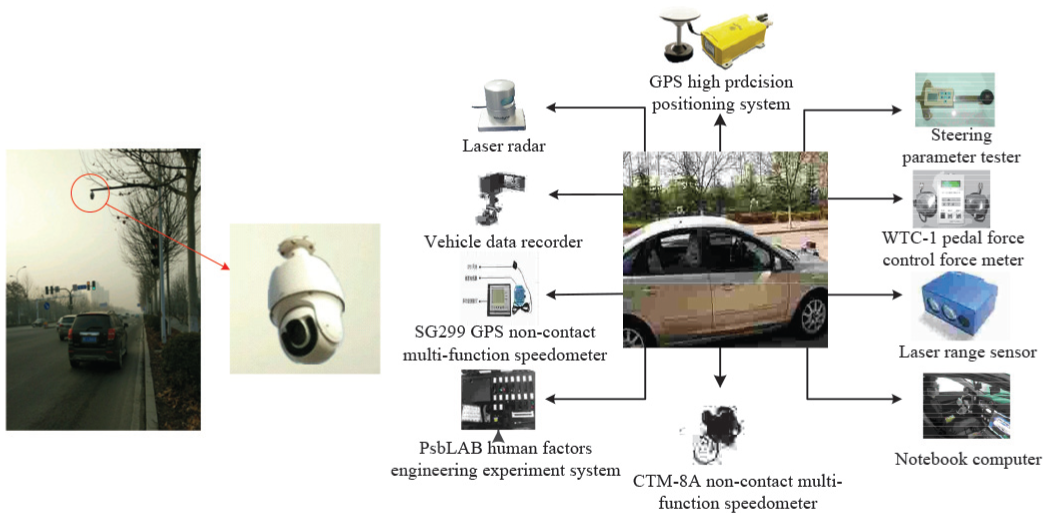
Information collection system of actual driving experiment.
Comparison between prediction and actual results of actual driving experiment.

Verification of lane selection model based on interactive parallel driving–simulated experiment
In order to verify the model, the multichannel interactive parallel driving simulation system was used to conduct the virtual driving experiment, as shown in Figure 6. In this confirmatory experiment, the three-lane road condition was constructed. Before the experiment, 20 drivers who participated in the experiment were trained in the driving simulator. During the experiment, the experimental data were stored and the whole video was recorded with the interference for driver was avoided. The experimental data were input to the model constructed in this article to calculate and output the optimal strategy result for driver. And then, the calculation result was compared with the actual lane selection result of the driver in experiment, and the result of comparative analysis is shown in Figure 7.

Driving simulation experiment.

Comparison between prediction and actual lane selection result for driving simulation experiment.
It can be seen from Figure 7 that the integrating degree of prediction and actual lane selection result was high with the built lane selection model in driving simulation experiment, and the average accuracy of the model prediction could reach 85.42%.
Discussion
The lane selection model based on dynamic game with complete information built in this article comprehensively considered the vehicle group situation especially the drivers’ propensity and vehicle type, and it mainly analyzed the drivers’ lane selection behavior under the ideal condition of the high development of Internet of Things. It is beneficial for the traffic manager to manage and command and dispatch the vehicles running on the road. However, there still exist the following deficiencies.
First, the complete extent of the information that the driver obtained would be different because of the different development level of Internet of Things. Therefore, it is necessary to study the drivers’ lane selection behavior under the condition of incomplete and symmetry (or asymmetry) information. Second, to reduce the complicity of the model construction, it was assumed that the driver of the vehicle in a front position has the priority to select lanes, and the multi-person dynamic game was divided into multiple two-person dynamic game to weaken the influence of other drivers’ lane selection. However, during the actual driving, there is no strict order for drivers to select lanes and the vehicle group situation will change once the drivers execute the selected actions. Therefore, the status and operations of the target vehicle and its surrounding vehicles can be ascribed to the change and transformation of vehicle group situation, and the dynamic game model between target vehicle and the vehicle group situation it located can be constructed to avoid the influence of the order of play. Third, because of the differences of China and the United States in road condition and driving environment, there will be some error in model itself when applying the natural driving data (NGSIM data) for model calibration under the road condition of China, thus the model accuracy will be influenced. Furthermore, to adapt to more complex traffic environments, the model needs to be extended to four or more lane scenarios, and the game behavior of drivers in different road segments, such as intersections or ramps, needs to be comprehensively considered.
Conclusion
In this article, the game behavior of the vehicles running on the urban expressway road section was analyzed, and the lane selection model based on multi-player dynamic game with complete information was constructed through comprehensively considering the factors that influence the drivers’ decision-making behavior, such as the vehicle group situation, especially the drivers’ propensity and vehicle type. The drivers’ payoffs under different combination of lane selection strategies were analyzed, and on this basis, the subgame perfect Nash equilibrium solution was solved through backward induction, and the drivers’ optimal lane selection strategy was obtained. The model built in this article can objectively reflect the actual operation characteristic of traffic flow on road section, and the theoretical basis of the research on lane selection decision-making can be provided for the command system of intelligent driving especially anthropomorphic driving under the condition of Internet of Things.
Footnotes
Handling Editor: Jiangchen Li
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This study was supported by the Joint Laboratory for Internet of Vehicles, Ministry of Education-China Mobile Communications Corporation under the project No. ICV-KF2018-03, the State Key Laboratory of Automotive Safety and Energy under Project No. KF16232, the Natural Science Foundation of Shandong Province (Grant Nos ZR2014FM027, ZR2016EL19), Social Science Planning Project of Shandong Province (Grant No. 14CGLJ27), Project of Shandong Province Higher Educational Science and Technology Program (Grant No. J15LB07), and the National Natural Science Foundation of China (Grant Nos 61074140, 61573009, 1508315, and 51608313).