
Abstract
This article presents the design of a spiral sampling device to perform lunar soil sampling and packaging, considering the special lunar environment and the physical and mechanical properties of the lunar soil. Combining the mechanical properties of lunar soil and the geometrical characteristics of the sampling device, the contact model between particles and the contact parameters between device and particles were adjusted. Through a discrete element simulation of the sampling process, the particles’ streamline, which is between the screw conveying modules and the sampling bailer, is derived. This result provides a theoretical foundation for the structural optimization of the device. Finally, a sampling experiment in simulated lunar soil verifies the feasibility of the sampling device.
Introduction
Human demand for extraterrestrial resources is becoming increasingly urgent, which makes space exploration technology accelerate toward greater specialization and complexity. As a key technology in the field of lunar exploration, soil sampling is of great significance for the collection and study of lunar soil. Thus far, only the United States and the former Soviet Union have achieved sampling of lunar soil. The Soviet Union’s Luna 24 unmanned lunar probe obtained 170 g of lunar soil sample from a depth of 160 cm,1,2 whereas in the Apollo Mission, the lunar soil sample manually collected by astronauts reached 381.7 kg.3,4
Although the Chinese lunar exploration program started in the 1990s, it was officially launched in early 2004 after a long period of comprehensive demonstration. 5 Despite its late start, China’s lunar probe has obtained great achievements in recent years, with a smooth and according to schedule implementation. At the present stage, the research concentrates mostly on lunar sampling, which is fundamental for the analysis of lunar soil. Many researchers have studied the lunar sampling under the surface. Tian and Deng 6 proposed a new coring bit with a barrier ring structure, and the barrier ring structure could reduce soil disturbance during drilling. Quan et al. 7 established a drilling load model based on the filling rate of auger flute (FRAF), which could be used to optimize the drilling parameters of the lunar regolith simulant. Zhang and Ding 8 established a penetration force and rotational torque (PFRT) model to describe the drilling forces, and the model could be used to optimize the structural parameters of the drill tool and the drilling strategies. The lunar surface sampling devices can be categorized into scoop, pincer, abrasion, and drilling samplers. From these devices, the drilling sampler is the most effective way of sampling and sealing. 9 It is the most commonly used because of its maintenance of the original state properties of the lunar soil during the whole sampling progress.
The lunar surface environment is very different from the natural environment on the earth. There is no atmosphere on the moon, it is in a high degree of vacuum, and the lunar surface is directly exposed to the universe. Thus, the temperature of the lunar surface changes violently. In the hot day, the lunar surface temperature goes up to 127°C, while in the cold night, the temperature can be reduced to −183°C. In addition, the surface acceleration of gravity in the moon is approximately 1/6 of that in the earth. In such a special environment, manual sampling is very difficult. However, a mobile autonomous sampling robot can greatly improve the safety and efficiency of sampling.
Recently, the design of a mobile spiral surface-soil sampler, specific to the lunar topsoil and based on screw conveying, hereafter called SSDSC, has been completed. 10 Its structure is shown in Figure 1.
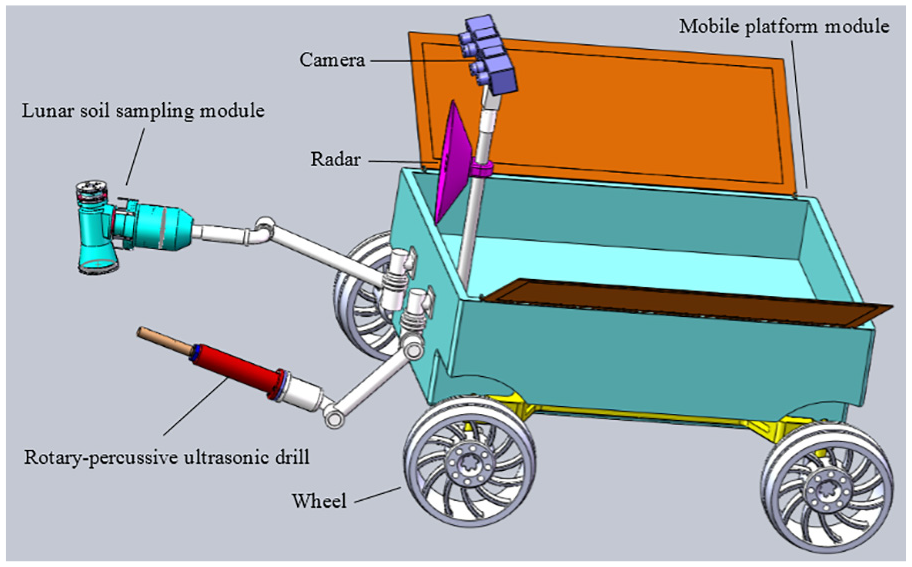
Mobile spiral surface-soil sampler.
However, simulation and experiments need to be performed to validate the feasibility of the device. This article focuses on the sampling efficiency of the SSDSC and simulates the flow direction of lunar soil particles during soil delivering, according to the discrete element method. Meanwhile, the defects of the current sampler have been found, which will be improved in a follow-up study.
The properties of lunar soil particles and lunar soil simulant
Morphological characteristics of lunar soil
Lunar soil is the lunar regolith that widely existed on the lunar surface, which consists of rock fragments, powder, breccia, molten glass, and so on. 11 In a narrow sense, it refers to the lunar regolith whose diameter is less than 1 cm, while the >1 cm fraction of lunar regolith is called lunar rock, and the <1 mm fraction is called lunar soil. 12 Figure 2 shows the lunar soil sample collected by the Soviet Union’s Luna 16 lunar probe.

Lunar soil sample collected by the Luna 16 probe.
The lunar soil was formed by millions of years of meteorite impacts that repeatedly melted rocks into glass and then broke the glassy rocks into powdered glass. As shown in the scanning electron microscope (SEM) image of lunar soil in Figure 3, the surface morphology of lunar soil particles is extremely complex. Most particles are irregular bulks with elongated, angular, or concave horn shape. Besides, semi-closed or closed pores are generally present inside most particles. 13

The SEM image of lunar soil collected by Apollo: (a) Apollo 14 sample, (b) Apollo 15 sample, and (c) Apollo 16 sample.
Physical and mechanical properties of lunar soil and lunar soil simulant
Due to the complex formation of the lunar soil and the unpredictable lunar environment, the lunar soil has some distinctive physical and mechanical properties, including particle density, particle size distribution, void ratio, compressibility, and shear resistance. Among them, the latter three properties play a key role in lunar probe and lunar soil sampling. For the accuracy of the experiment, a lunar soil simulant GUG-1B whose main lithology is alkaline olive basalt, supplied by the China Academy of Space Technology (CAST), was used in experiment. And the properties of GUG-1B are listed in Tables 1–4.
Variation law of void ratio of lunar soil with depth and the void of GUG-1B.

Average diameter of lunar soil particle and the diameter of GUG-1B.

Compression factors of lunar soil under different void ratios and the compression factor of GUG-1B.

Shear strength parameters of lunar soil and GUG-1B.

Void ratio
Void ratio refers to the ratio of pore space to particle volume, which is used to describe the degree of compaction of lunar soil. It is well accepted that the lunar soil whose void ratio is less than 0.6 can be classified into dense soil with low compression while the other part of lunar soil is seen as loose soil with high compression. 14 The variation law of void ratio of lunar soil with depth and the void of GUG-1B are shown in Table 1.
Particle size distribution
Without consideration of the lunar rocks, the lunar soil particle diameter is generally less than 1 mm, and the average range is generally between 40 and 130 μm, with an average of approximately 70 μm. Table 2 shows the diameter of GUG-1B and the mean values of lunar particle diameters at the Luna and Apollo series lunar sites, estimated by Gromov based on available data.
Compressibility
The compressibility of lunar soil refers to compression generated by the decrease of porosity between lunar soil particles under pressure. Tests show that the compression of lunar soil under normal pressure can be considered as the decrease of pore volume. 15 The compression factor of lunar soil under different void ratios and the compression factor of GUG-1B are listed in Table 3.
Shearing properties
Shear resistance is the ultimate strength that lunar soil can sustain before sliding shear failure happens, and generally, it is characterized by friction angle and cohesion. The friction angle is used to describe the bonding property between particles while cohesion describes the frictional property between particles. 16 In addition, the shear resistance is also affected by external factors such as normal stress. When the normal stress gets greater, the lunar soil becomes denser, and the shear stress increases along with friction angle and cohesion. The shear strength parameters of lunar soil and GUG-1B are shown in Table 4. 17
Although being complex and diverse, the mechanical properties of lunar soil interact with each other. Studies show that the friction angle increases with decreasing void ratio while the shear strength increases along with friction angle. During sampling, lunar soils with different degrees of compactness have a different void ratio, compressibility, and shear strength, which influences the sampling process in different ways. Accordingly, the reasonable selection of parameters is essential for the reliability of the study results. In experiments and simulation, the impact of parameters needs to be analyzed comprehensively and relevant parameters need to be reasonably determined in order to ensure consistency in testing and simulation.
The properties of particles in simulation
As the parameters related to lunar soil are unknown, soil mechanics experiments need to be carried out to complete the parameter matching. Parameters including cohesion, friction angle, and other related mechanical properties are measured under the same conditions, repeatedly, until the simulation result matches the real properties of lunar soil.
In order to ensure the reliability of the simulation, the parameters of the particles in the simulation are set with reference to the properties of the actual lunar soil and GUG-1B. The relevant parameters of particles in simulation are shown in Table 5.
The parameters of particles in simulation.

Design of spiral surface-soil sampler
Structural design of the spiral sampler
This article presents the design of a soil sampling device, specific to lunar soil and based on screw conveying, able to accomplish sampling and filtering, repeatedly, and conduct packaging to keep the fixed form of lunar soil. As shown in Figure 4, the structure of the soil sampling device consists of the driving part, gathering module, collecting container, and arm lever.18,19 The driving part provides power for the sampler. The gathering module, whose role is to collect and guide the flow of lunar soil particles, is the main part of the sampler. The collecting container is located on top of the gathering module, and it is used for collecting and sealing the lunar soil. The arm lever is a connection between the sampler and the lunar probe that assists it in positioning and fixing.

The structural diagram of spiral sampling device.
The soil sampling device based on screw conveying works as follows. First, the conical screw mechanism of the gathering module, driven by the driving part, rotates to provide positive pressure for the conveying of lunar soil. Then, the gathering module directionally transfers the lunar soil to a guide plate during rotation. The lunar soil sample is transported to the collecting container under the guidance of the guide plate. The robot arm places the container vertically in the robot body with the opening of the container facing up. Finally, the arm moves horizontally to disconnect from the container, which completes automatic packaging.
Compared with other samplers, the soil sampling device based on screw conveying is characterized by its simple structure and low power consumption. It can complete screening, collecting, compacting, and sealing efficiently, which makes it more suitable for soil sampling in the complex lunar environment.
Structural design of the gathering module
For the purpose of optimization and analysis, a simulation was done to observe how each part of the lunar soil sampler affects its sampling efficiency. The simulation model shown in Figure 5 was established by a three-dimensional (3D) modeling software. During modeling and for simplification of the simulation, the subordinate parameter and structure were ignored. Considering that the gathering module plays a major role in the sampling process, it needs to be designed and modeled in detail, under the following two principles:
Any cross-sectional area of lunar soil particles that passes the gathering module is of the same size. The preliminary design goal of keeping the same cross-sectional area is to guarantee that the flow resistance caused by poor liquidity will be as little as possible, and the lunar soil sample can, as expected, fill the vessel.
Related to a traditional metal drill, the gathering module was designed to reduce drilling resistance and to improve the transmission capacity of the covered soil sample that is in the middle of the vessel. As a result, the path length under shear motion can be shortened and the energy used in sampling can be reduced.

Structure of the gathering module: (a) module lateral view and (b) module end view.
Performance analysis of the sampler
Motion analysis of lunar soil in a spiral groove
From the flow-regime division analysis of lunar debris, it was found that there is no interlayer exchange in the stable area. Through motion and bounded boundary analysis on lunar soil simulants, the relationship between the axial upwelling velocity of lunar debris and the motion parameters of the auger tool was derived. It is shown in Figure 6.
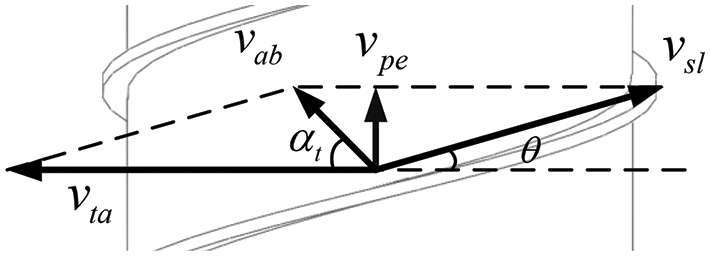
Velocity components of the ideal chip removing flow.
In Figure 6,

The formula can be rewritten as in equation (2)

The ratio of the vertical velocity of the lunar debris to the revolving speed of the spiral wing, the chip removal capacity coefficient, is shown in equation (3)

It can also be expressed as in equation (4)

Stress analysis of lunar soil in spiral groove
The chip removal capacity coefficient discussed in the previous section is determined by two parameters, the tool helix angle
In the steady flow area, the lunar debris as a whole is subjected to differential friction external forces, and the external normal stress of the lunar soil is affected by the boundary, as shown in Figure 7.

Force components of the ideal chip removing flow.
In Figure 7, the support force of the spiral wing of the drill rod is N, with a direction perpendicular to the spiral wing surface; the frictional force between the spiral wings and the flowing lunar soil is F; the friction force of the inner surface of the spiral groove to the lunar soil is

Assuming ds is the unit length along the direction of the spiral, the surface force is differentiated in the direction of the spiral height. Through the differential of the variables in the formula, it is brought into the force balance equation and the linkage relationship between
The simplified spiral flute chip removal control equation can be rewritten in equation (6)

In equation (7), the basic condition for the existence of solution is

Equation (8) defines the chip removal environmental factor of the drilling tool

The equation has a physical meaning. The numerator of the equation is the frictional coefficient between the lunar debris and the metallic wall of the auger stem. The denominator of the equation is the frictional coefficient between the lunar debris and the in situ lunar boundary. The physical properties of the lunar soil, the material of the screw, and the surface treatment method determine the value of
The spiral groove boundary coefficient is defined in equation (9)

The boundary coefficient is mainly composed of the normal stress in the different directions of the lunar debris in the spiral groove and the structural parameters of the spiral groove itself. Because of the fluidity of lunar soil, the normal stress of the moving soil in all directions is approximately equal, and these relationships are shown in equations (10) and (11)


The basic chip removal equation can be rewritten as equation (12)

Substituting

Thereby, the structural design of the SSDSC is completed, and the motion and mechanical model of the lunar micro-element in the spiral groove are analyzed theoretically, which provides the basis for the subsequent simulation analysis.
Spiral sampling process simulation based on discrete element method
Contact model between lunar soil particles
Contact models based on the contact force between particles are the basis for constructing a discrete element numerical computation. EDEM is a universal CAE software designed for particulate systems based on discrete element method. EDEM is mainly composed of three parts: Creator, Simulator, and Analyst. Creator is a pre-processing tool that completes geometry import and particle model creation, Simulator is a solver that simulates the motion process of a particle system, and Analyst is a post-processing module that provides a wealth of tools for analyzing calculation results. EDEM provides a range of contact models based on contact mechanics. During simulation, an applicable contact model needs to be chosen depending on the material properties and contact state. The specific applications for each contact model are listed as follows: 20
Hertz-Mindlin (no slip). Hertz-Mindlin (no slip) model is the default contact model that simulates without considering adhesion. It is calculated based on the relative velocity and associated forces between particles.
Hertz-Mindlin with bonding. If the mock objects are non-granular media with a smaller modulus of elasticity, the bonding between particles needs to be considered additionally. As the particles bond up as a whole, the adhesion force affects the normal and tangential force between particles.
Linear spring. Linear cohesion is a cohesion contact model that modifies the default Hertz-Mindlin contact model for particle–particle and particle–geometry interaction by adding a normal cohesion force. In this model, the normal force between particles is simplified as a structure that consists of damping and spring in parallel.
Hysteretic spring. The Hysteretic Spring model allows plastic deformation behaviors to be included in the contact mechanics equations, resulting in bulk elasto-plastic deformation behavior.
Compared with compact rock and concrete, the lunar soil has a higher degree of dispersion.21,22 As the deformation of particles at contact is fairly small in relation to the particle surface area, the adhesion between particles is small as well. Thus, neither the Hertz-Mindlin with bonding model nor the linear spring model applies. During the drilling and gathering of lunar soil, the interaction between particles is complex. However, it can be described by the tangential and normal forces in a certain way. The Hertz-Mindlin model covers both the tangential and normal forces in the contact progress, which can explain the effects that the elastic modulus and Poisson’s ratio have on the contact force. That is to say, the influence caused by the properties of a specific material can also be taken into account. Since there is no Hysteretic spring model in EDEM, the Hertz-Mindlin (no slip) model is chosen to depict the contact state between lunar soil particles.
Mechanical properties of lunar soil and parameter matching of discrete element simulation
Physical parameters of the lunar soil simulant supplied by CAST provide a good foundation for discrete element simulation, as shown in Tables 1–4. The parameters are matched by the Generic EDEM Material Model (GEMM) database. The GEMM database consists of different groups of simulation parameters, which are suitable for various experimental conditions. Each group of simulation data in the GEMM database has been matched with the corresponding experimental data for the credibility of simulation results. The matching process is shown in Figure 8, and the matching parameters are shown in Table 6. According to the matching results, the first group of parameters are chosen as the simulation parameters.

GEMM parameters matching process.
Matching parameters for simulation based on GEMM.

GEMM: Generic EDEM Material Model.
Through structural design and calibration of critical components, and then combined with the parameter matching of lunar soil, the simulation parameters are set as shown in Table 7.
Simulation parameters of sampling bit.

Although the values of f3 and f4 have been set according to the design requirements, we expect f3 to be as small as possible and f4 to be as large as possible in order to achieve a better simulation result.
Discrete element simulation of sampling process
To simulate the flow state of lunar soil particles, the 3D model of the lunar soil sampler was imported into the discrete element simulation software EDEM, and Particle Factory was used to import particles. The simplified simulation model is shown in Figure 9.
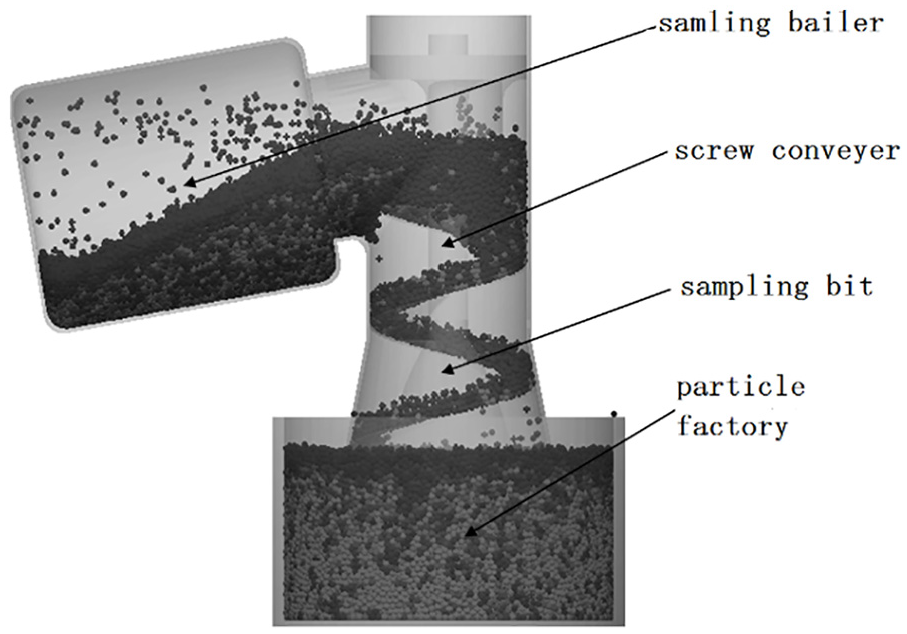
The simplified simulation model of sampler.
The particle flow condition at 15.45 s is shown in Figure 10. By intercepting simulated images at different times, the change in position of particles can be seen explicitly.

The particle streamline diagram at 15.45 s.
The simulation results show that the angle of the particle motion path is approximately 30° at a speed of 300 r/min, which is close to the calculation result. In addition, the stack progress of the particles can be seen from the streamline on top of gathering module as well. Figure 11 shows the streamline of particles around the conical screw mechanism of the gathering module. It can be seen that particles were transmitted with the guide of the screw mechanism. The movement of particles along the screw is considered to be high energy utilization. However, the simulation results also show that the streamline of particles is a little disorderly in the junction of drill and spiral, which will adversely affect the utilization of sampling energy.

Streamline of particles around the conical screw mechanism of gathering module.
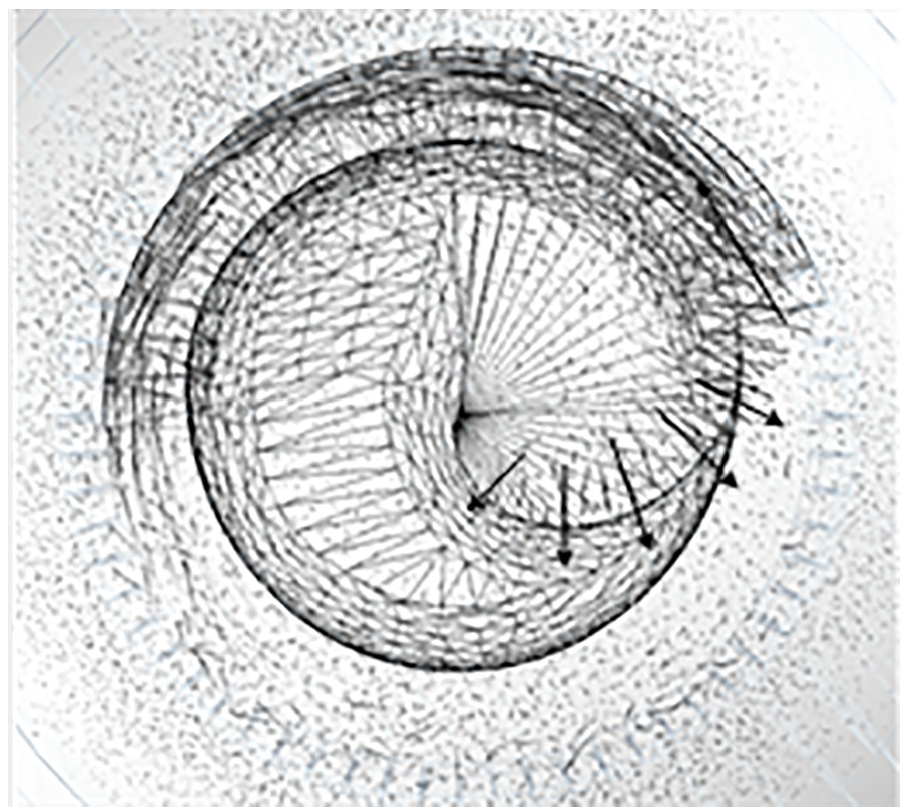
The sampling process through the cross section of the lunar soil sampler in Figure 12 shows that particles enter the sampler along the tangential direction of the spiral rotation. Therefore, it can be deduced that the lunar soil particles located mainly in the fan side of the collecting container in the picture, after it is filled with particles.

Sector of cross section sampling trajectory.
Figure 13 shows the streamline of the end face of the gathering module. From the top of gathering module, it can be seen that particles flow divergently toward the outer involute according to the original plan envisage. The case where particles enter the container is shown in Figure 14. At the beginning, the mass of particles increased rapidly and then slowed down and stabilized at 185 g after 180 s.
Streamline of the end face of gathering module.

The particles’ weight of the spiral sampling simulation.
Based on the above analysis, the flow state, movement direction, and accumulation effect of lunar soil particles are obtained by simulation. Through the simulation results, it can be concluded that the lunar soil sampler can gather lunar soil and transfer it into the container in accordance with the expected task.
Experimental verification of spiral sample
To verify the feasibility of the design, a prototype, whose sizes are shown in Figure 15, was manufactured based on the design results and then a spiral sampling experiment was carried out with it. The experimental equipment and experimental environment are shown in Figure 16.

The sizes of prototype.

Experimental equipment and experimental environment.
The simulated lunar soil used in the experiment is provided by CAST. The simulated lunar soil is similar to the lunar soil with respect to the mineral composition, chemical composition, and physical and mechanical properties of earth materials. The simulated lunar soil and the Apollo 14 sample taken from the moon have a similar chemical composition, mineral composition, and physical and mechanical properties. Thus, the simulated lunar soil is an ideal low titanium basaltic simulated lunar soil. 23
The experimental results are shown in Figure 17. As time goes on, the sample weight increases until it reaches stability at 175 s, which proves that the spiral of the gathering module can collect lunar soil efficiently and the lunar soil sample can be transferred into the collecting container to finish packaging. However, as the lateral output is not big enough, a stall phenomenon happens even before the container is filled with lunar soil. Comparing the results of the experiment and simulation, the simulation results show that the sampler collected 185 g of particles in 180 s, while the sampler collected 172 g in the experiment. The collection efficiency in the simulation was higher than the experiment with an error of 7.5%.

The sampling weight of the spiral sampling experiment.
Conclusion
In this article, a design of a soil sampling device specific to lunar topsoil based on screw conveying was introduced to complete the task of lunar soil sampling. Based on the design, a series of simulation and experiments were carried out to validate the feasibility of the sampler. Simulation results show that particles enter the sampler along the tangential direction of a spiral rotation and flow divergently toward the outer involute, according to the original plan. Besides, the angle of particle motion path is approximately 30° at a speed of 300 r/min, which verifies the calculation results. Therefore, we can draw the conclusion that the soil sampling device based on screw conveying is efficient and feasible, and it is a good fit for lunar soil sampling.
However, problems are also found in the research. For example, the particle flow in the junction of drill and spiral appears to be a little disorderly in the simulation, which leads to an adverse effect in the utilization of sampling energy. This is mainly caused by the fact that the end of the screw is not effectively guided. In the next study, we will optimize the configuration of the sampler and install a guiding device at the end of the screw. Besides, the flow direction of particles needs to be considered in the design to improve efficiency and reduce clogging. In the future work, improvements focusing on the problem will be done to guarantee better results during lunar soil sampling.
Footnotes
Handling Editor: Davood Younesian
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was financially supported by Pre-research project for manned space flight (17520306), the National Nature Science Foundation of China (No. 51575123), Self-planned Task (No. SKLRS201801B) of State Key Laboratory of Robot Technology and System (HIT), and the Fundamental Research Funds for the Central University (Grant No. HIT. NSRIF. 2017028).