
Abstract
Product infant failure is the most crucial part of product quality risk that critically affects customer satisfaction. However, most of manufacturers lack sufficient understanding of the formation mechanism of product infant failure and quantitative infant failure risk modeling technology. These issues cause the inefficiency of warranty policy in preventing and controlling infant failure risk. Therefore, first, on the basis of the reverse mapping process of axiomatic design, an infant failure risk formation chain, that is, “process quality variation—physical defect—functional vulnerability—infant failure,” is proposed in this study by considering quality variation propagation and functional failure dependency to determine the inherent formation and dependent enlarging process of the risk. Second, on the basis of the risk formation chain, the infant failure risk is modeled from inherent risk and dependent risk. Specifically, the inherent infant failure risk is computed based on the stream of quality variation in production, whereas the dependent infant failure risk is computed by a Bayesian network by considering the functional failure dependency. Finally, a case study of an illustrative electromechanical system is introduced to verify the applicability of the proposed method. Result shows that the proposed method has a better performance in infant failure risk modeling.
Keywords
Introduction
Quality risk is specifically emphasized for product quality improvement according to the newly released ISO 9001:2015 standard. 1 Infant failures can sharply decrease the customer satisfaction and increase warranty costs, 2 which are the most critical object of product quality risk management. However, most of manufacturers lack sufficient knowledge of product infant failure mechanism and quantitative infant failure risk modeling technology. 3 These issues result in the weakness of warranty policy in preventing and controlling infant failure risk. For example, if a proactive infant failure risk analysis for Samsung Galaxy Note 7 exists, 4 then the painful damage due to battery explosion may be remarkably reduced or avoided.
Specifically, infant failures are concentrated embodiments of accumulation of product manufacturing quality variation, 5 and these failures are the important sources of product quality risk. 6 Regarding the quality variation propagation and its influence on infant failure, Huang and Shi 7 proposed the stream of variation (SoV) method to analyze the transmission, connection, and accumulation of quality variations in multistage manufacturing process. This method provides theoretical foundation for the analysis of quality variation propagation. Jiang and Murthy 6 investigated the effects of quality variations in manufacturing on product failure and proposed quality data-based reliability modeling in both parametric and non-parametric cases. Thornton et al. 8 proposed the variation risk management to reduce the effect of quality variation on the final quality of a product. He et al. 9 presented a multilayered model structured as “part, component, and system levels” to determine the infant failure rate by quantifying the holistic quality variations based on the manufacturing process. Abellan-Nebot 10 proposed a new approach modeling the dimensions of ceramic tiles based on an improved SoV model that helps manufacturers improve process and quality control. Liu et al. 11 proposed an improved failure mode and effect analysis (FMEA) based on cluster analysis and foreground theory. The weight of the whose risk factor is objectively obtained based on the risk assessment information. These studies are helpful to identify the key quality variations related to infant failure and analyze the probability of the infant failure risk by clarifying the manufacturing variation propagation process. However, production variation is inevitable,8,12 and infant failure cannot be eliminated completely. Moreover, once infant failure derived from inherent manufacturing uncertainties exists, infant failure will spread due to the effect of functional failure dependency. 13 Therefore, accurately analyzing the functional failure dependency for inherent infant failure is another crucial work to expound the mechanism of infant failure risk.
Furthermore, some studies consider functional failure dependency with each other. Krus and Lough 14 presented a function-based failure propagation (FBFP) method to analyze dependencies of failures through the functions present in a system. Tumer and Smidts 15 introduced the functional failure identification and propagation (FFIP) analysis framework. This framework models the behavior of components and failure conditions of functions, such that functional failures and their dependencies can be assessed using a system model through behavioral simulation. Anastasiadis et al. 16 constructed an aging and statistical dependence model among the system components by associating individual shock processes with potentially overlapping subsystems composed of groups of components to handle dependent failures. Barua et al. 17 proposed a risk modeling methodology for dynamic systems based on a Bayesian network (BN). This methodology is used in representing the dependencies among variables graphically and capturing the changes of variables over time to address time-dependent failures in risk estimation of oil/gas and petrochemical plants. Xing et al. 18 proposed a new combinatorial method of dynamic failure tree (DFT) and Markov-based method for the reliability analysis of the systems subject to functional dependencies. He et al. 19 proposed relational tree to analyze the physical decomposition and functional dependencies of infant failure. Wang et al. 20 modeled and analyzed the reliability of phased-mission system subject to multiple functional dependence groups using a Markov chain–based methodology and considered propagated failures with global and selective effects. Chiacchio et al. 21 believed that using the Priority-AND gate in the dynamic fault tree could accurately interpret the stochastic dependence of components in the system, while it is necessary to check the consequences of its failure logic and system consistency behavior. These studies are beneficial for accurately analyzing the enlarging effect of infant failure risk.
Generally, process quality variations and functional failure dependency should be considered simultaneously for infant failure risk assessment. Therefore, a novel risk modeling approach for product infant failure by considering quality variation propagation and functional failure dependency is presented in this work. First, an infant failure risk formation chain, that is, “process quality variation—physical defect—functional vulnerability—infant failure,” is proposed based on the reverse mapping process of axiomatic design (AD) to identify the formation mechanism of infant failure risk. Second, the risk is categorized into two aspects, namely, inherent and dependent risks, based on the risk formation chain. Finally, the inherent infant failure risk is analyzed based on the stream of quality variation in production, whereas the dependent infant failure risk is analyzed using a BN that considers functional failure dependency.
The rest of this article is organized as follows. Section “Infant failure risk formation chain” formulates an infant failure risk formation chain. Section “Infant failure risk modeling based on the risk formation chain” proposes a quantitative risk modeling approach for the infant failure. Section “Case study” presents the case study of an illustrative electromechanical system (EMS). Finally, section “Conclusion” presents the conclusions.
Infant failure risk formation chain
Notations
The notations used in this article are defined as follows:

Connotation of infant failure risk
Product quality is the output of design and development process, which is embodied in usage by reliability. The key aim of product quality risk management is to ensure a stable manufacturing process and a highly reliable usage period. In addition, most of the infant failures are determined by the production quality variations and manufacturing defects, which seriously affect customer satisfaction in early usage. Therefore, infant failure risk is an important and specific part of product quality risk. On this basis, the connotations of infant failure risk must be further clarified as follows:
Risk sources are inevitable manufacturing quality variations. Therefore, after a product has been manufactured, a potential occurrence probability of infant failure may exist.
When the product is tested in its early usage, the potential probability gradually results in the occurrence of infant failure due to the stimulation of environmental stress, and this failure may trigger other failures, such as failure dependency in different extents, thereby expanding the severity of the infant failure.
Therefore, in this study, the infant failure risk is defined as the comprehensive measurement of quality variation and functional failure dependency. That is, more quality variations indicate a stronger failure dependency and higher infant failure risk. Therefore, quantitatively expounding the formation mechanism of infant failure risk is important.
Infant failure risk formation chain based on AD
From the perspective of system engineering, Professor Suh 22 proposed the AD theory. This theory is a bidirectional domain mapping relationship model composed of customer, functional, physical, and process domains. The forward mapping of AD is the product design and development process, and the output is the manufactured product. Meanwhile, the reverse mapping of AD is the risk source identification process. In the reverse mapping process, the process quality should be monitored to ensure a reasonable physical architecture of a product. By achieving the physical requirements, the functional requirements will also be satisfied. Then, in its early usage stage, the product function may behave normally. On the basis of the reverse mapping process of AD, a risk formation chain, that is, “Process Quality Variation—Physical Defect—Functional Vulnerability —Infant Failure,” is proposed to identify the formation mechanism of infant failure risk, as shown in Figure 1.
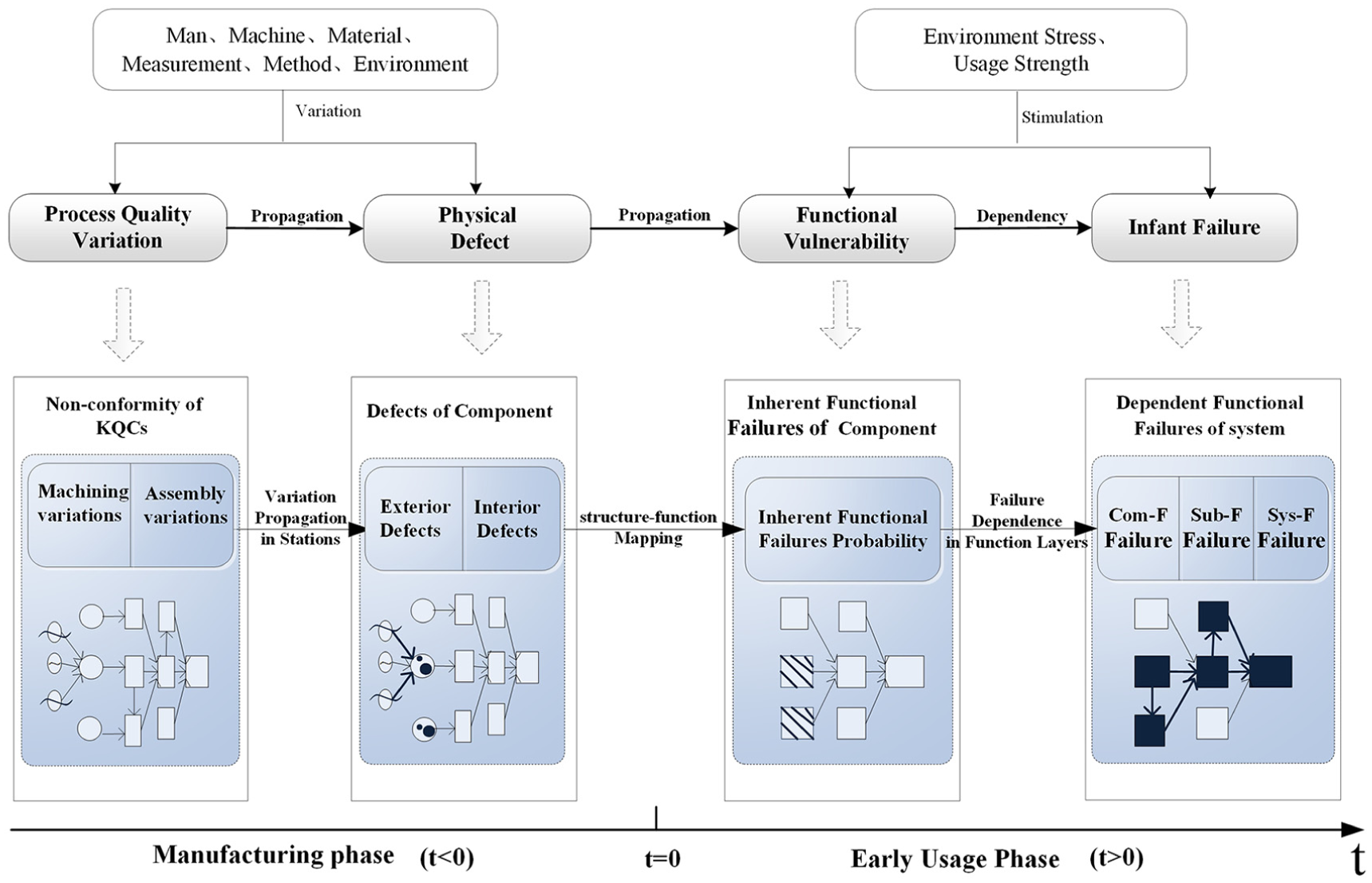
Infant failure risk formation chain.
As shown in Figure 1, when the reasonable design scheme is fixed, the product has transferred into the manufacturing stage. The components are machined and assembled based on the process requirements. In view of the variations of people, machines, materials, methods, environment, and measurements involved in the process, the key quality characteristics (KQCs) will have quality variations in machining and assembly process presented as non-conformities. These quality variations accumulate and propagate between stations and cause physical defects of the components, namely, exterior defects (e.g. excess of tolerance and deformation) and interior defects (e.g. cracks and residual stress). Moreover, these defective components are the infant failure risk carriers. Besides, preliminary identification of KQC can be finished based on the engineering experiences or powerful statistical analysis tool, such as the design of experiment. After the product has been transferred into its early usage, components with physical defects may develop vulnerability of their functionalities and inherent infant failure probabilities. Under the condition of actual stress, the vulnerable components gradually begin to degrade, which causes critical failures of these degraded components. Meanwhile, the infant failures of these components may further cause dependent function failure of system with dependency effects (e.g. series, parallel, hot spare (HSP), cold spare (CSP), and other functional dependencies). Furthermore, the failure may result in relatively severe consequences, such as penalty cost of system shutdown. This issue is the formation process of infant failure risk. Hence, quantitative risk modeling should be urgently proposed based on the risk formation chain to prevent and mitigate infant failure risk effectively.
Infant failure risk modeling based on the risk formation chain
Framework of infant failure risk modeling
Workflow of the modeling
The propagation process from quality variation to infant failure and the deterioration of infant failure consequence can be explained using the proposed infant failure risk formation chain. In this section, the infant failure risk modeling framework is presented based on the forward process of the risk formation chain, as shown in Figure 2.
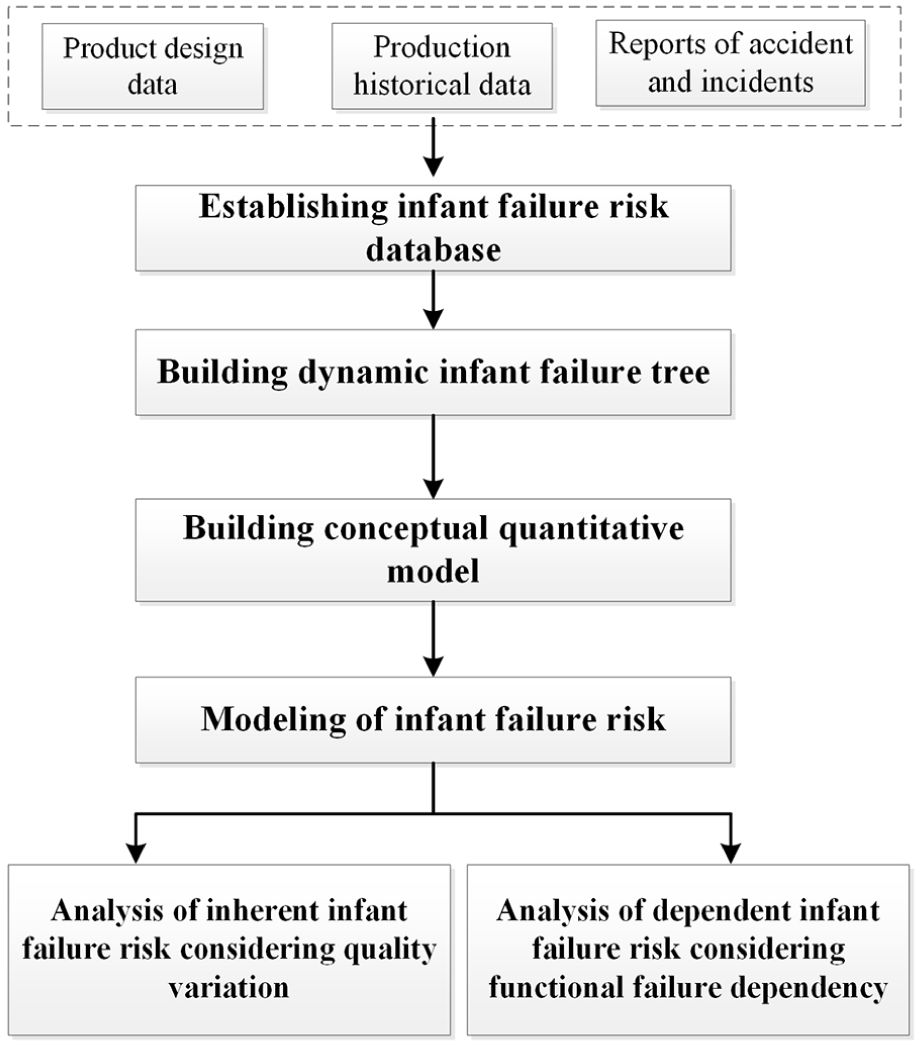
Workflow of infant failure risk modeling.
First, infant failure risk-related data, including product design, production historical data (i.e. manufacturing quality variation and product quality inspecting data), and reports of accident and incidents in the early usage (i.e. warranty data) should be collected based on the big industrial production data using sensors or searched using cloud network (Figure 2). The infant failure risk database should be established by sorting these data.
Second, DFT should be established based on the risk formation chain for infant failure risk analysis. By analyzing the warranty data in the infant failure risk database, the top events and related components of the DFT can be determined. Then, the failure correlation of each component can be determined by analyzing the product design data in the database. Finally, the dynamic infant failure tree (DIFT) can be established based on the correlations among the components.
Third, after the qualitative relationships are determined among components through the DIFT, the conceptual quantitative model should be built subsequently to characterize the infant failure risk generally. The specific analysis is discussed in section “Conceptual quantitative model.”
Finally, on the basis of the conceptual model, the infant failure risk can be categorized into two different aspects, namely, inherent and dependent. The inherent infant failure risk is mainly caused by quality variation, whereas the dependent infant failure risk is mainly caused by the functional failure dependency. Their detailed modeling approaches are explained in sections “Analysis of inherent infant failure risk considering quality variation ” and “Analysis of dependent infant failure risk considering functional failure dependency,” respectively.
Conceptual quantitative model
On the basis of the analysis of the front part of infant failure risk chain in Figure 1, inherent infant failure probabilities are present in defective components after the product is produced. This phenomenon is due to the KQC variations in manufacturing process, which constitutes bottom events of the DIFT. When the product is tested in its early usage, the defective components should fail under various environmental stresses; thus, bottom events occur and losses, such as maintenance cost, may arise. Furthermore, as explained by the rear part of the infant failure risk chain, the inherent failures of the component may propagate to the entire system, which may result in dependent infant failures of the system caused by failure dependencies. After the occurrence of dependent infant failure of the system, problems, such as insurance costs, customer dissatisfaction, and environment pollution, may arise. Thus, the two aspects of the infant failure risk of a product are expressed as follows
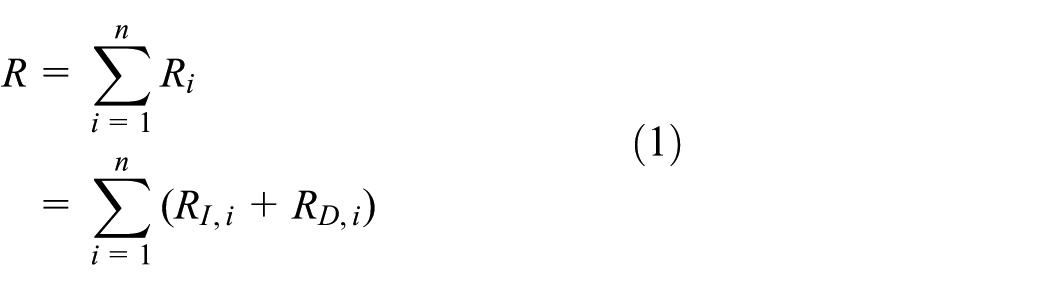
where Ri is the infant failure risk of the ith component and
The objective of infant failure risk modeling is to reduce the losses due to infant failure in advance. Thus, the cost-based risk modeling is adopted for each component to analyze the inherent and dependent infant failure risks. Specifically, the inherent infant failure risk can be represented as

where
When a product is tested in its early usage, the failure of one component due to environmental stress may result in other failures in the system because of the functional failure dependency. After the dependent infant failure of the system occurs, problems, such as insurance costs, customer loss, and mass of released harmful contaminants into the environment, may arise. Thus, the dependent infant failure risk of the ith component can be expressed as follows

where λD,i(t) is the dependent infant failure rate of the system when only the ith component is functioning, and IFLD,i is the dependent infant failure losses of the ith system when only the ith component is functioning. The time interval of the infant failure risk is
Analysis of inherent infant failure risk considering quality variation
As shown in equation (1), the inherent infant failure risk of a component can be analyzed based on the inherent infant failure rate
Inherent infant failure rate computation based on SoV
In multistage manufacturing process, quality variation of KQCs exists and propagates in each station and may cause physical defects (i.e. exterior and interior defects) of the component and result in infant failure. The inherent infant failure rate of the ith component can be expressed as follows


where
The reliability of the jth KQC variation that does not cause infant failure to the ith component, which is characterized by the exterior and interior defects during time t, can be defined as follows 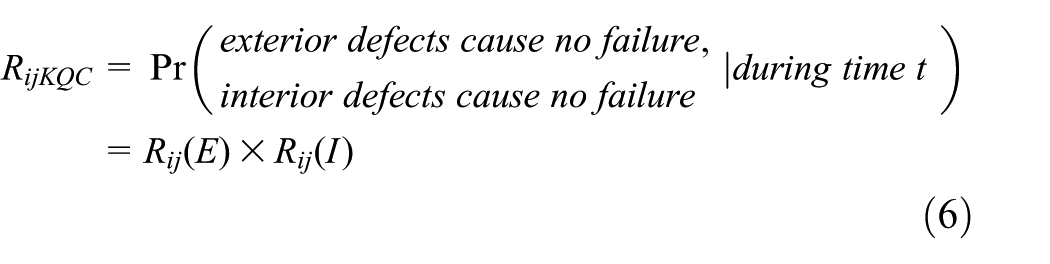
where
The deviation of

where

where

Therefore

From this model, the inherent infant failure probability of a component can be calculated.
Inherent infant failure losses
On the basis of the theory of failure cost analysis, the inherent infant failure losses of the ith component can be presented as

where Cri is the replacement cost of component i, Cw is the maintenance labor cost per time unit, and
From this model, the inherent infant failure risk of component can be obtained.
Analysis of dependent infant failure risk considering functional failure dependency
As shown in equation (2), similar to the calculation of inherent infant failure risk, the dependent risk of a component can be analyzed based on the dependent infant failure rate
Dependent infant failure rate computation based on a BN
The dependent infant failure rate of the system when only the ith component fails can be expressed as follows

where
Step 1: modeling structure of the BN
The BN topology can be modeled on the basis of the nodes of their perspective functions (i.e. system, subsystems, and components) and dependence relationships. Each node is a random variable that can determine whether a failure occurs or not. If the value of a node is “S,” then no failure occurs. If a failure occurs, then the value of that node becomes “F.”
The infant failure probabilities of root nodes (components) are simply the inherent infant failure probabilities analyzed in equation (3). The conditional probability tables (CPTs) represent failure dependency relationships of these nodes.
Step 2: modeling the CPT of the BN
After the structure of the BN is determined, the dependence relationships among nodes are quantified by constructing the CPTs attached to the nodes using the DFT.
For the BN, the graphic structure represents the qualitative relationship between an individual node and its parent and child nodes. Meanwhile, the CPT with each non-root node represents the quantitative functional failure dependency relationships (i.e. series, parallel, HSP, CSP, common failure causes, and cascading failure) between nodes. The CPT can be acquired using the DFT model to characterize the functional failure relationships between the nodes of the established BN. Subsequently, the conditional probability distribution of various gates should be explained briefly, which can be transferred to the CPT with its corresponding BN models.
AND
Let
OR
The notation and meanings of all variables and their corresponding state spaces are similar to the aforementioned AND gate. Let

CSP
According to the failure mechanism of CSP, the failure distribution of the spare is related to its failure rate and the failure time of the primary component. Let x and y be the states of primary input A and spare B, respectively, and λ is the failure rate of A and B. Obviously, only wheny > x, P(B = y|A = x) makes sense. It is assumed that the failure rate of spare part and component is subject to an exponential distribution;
26
then
HSP
Despite the difference in failure mechanisms between the AND gate and HSP, the conditional probability distribution of the output nodes for HSP is identical; thus, they are not repeated.
Functional dependency
For the common cause of failure, the functional dependent gate (FDG) can be used. Meanwhile, in the case that the FDG has only one trigger event A, the CPT of the output B dependent of A under the condition that A has occurred will be an identity matrix. Its CPT is expressed as follows

Meanwhile, the FDG has two or more trigger events, and an intermediate node is inserted between the output node and all the trigger nodes. The CPT of the intermediate node depends on the relationship between the intermediate node and all the trigger nodes, whereas that of the output node will also be an identity matrix and is only dependent on the intermediate node.
Step 3: probabilities of system-dependent infant failure
After the probability calculation of the inherent infant failure of the ith component and determination of CPT, the probability of the system-dependent infant failure can be determined from the bottom to the top using the BN inference, supposing that only the ith component fails. First, the infant failure probability of the jth subsystem (as a child node) that is dependent on the ith component (as a parent node) can be identified using

where
Then, infant failure probabilities of the system dependent on the ith component are expressed as follows

where
Dependent infant failure losses
On the basis of the system engineering view of the cost, the dependent infant failure losses of the system can be expressed as follows

where
Case study
Background
Modern mechanical devices are characterized as multi-functional EMSs, which are composed of hundreds or thousands of components and are expected to be highly reliable during operation. However, EMSs often have high infant failure risk due to the increasing complexity of quality control in the production. This complexity is caused by excessive control parameters and stringent manufacture precision of EMSs. To aid the EMS manufacturers in China in assessing the risk of infant failure before shipment, this study uses the proposed method to model the infant failure risk of a typical EMS producer, its functional constitution, and key manufacturing processes, as shown in Figure 3.

Functional relationship of a complex EMS and its key manufacturing processes: (a) functional relationship of the EMS and (b) manufacturing process of the control module 1.
As shown in Figure 3(a), the EMS is composed of control, power supply, powertrain, and hydraulic systems. The control system includes two control modules connected in parallel, which are used to perform the start–stop control of the main valve. It also sends signal to the hydraulic subsystem and controls the execution. The powertrain system is a key subsystem composed of a turbine, reducer, and pump. The power supply subsystem is composed of one main valve in the main work mode. Regarding its high infant failure rate, the manufacturing process of control module 1 is expounded, as shown in Figure 3(b). In addition, numerous unavoidable quality variations exist in the production process, including welding offset, nonconforming components, and assembly disorders. These variations are the main causes of the high infant failure of control module 1, and this failure may possibly cause cascading failures of other components due to the functional failure dependency effect.
The main purpose of this illustrative example is to model fully the infant failure risk of the EMS based on the manufacturing processes of components and identify its key components for infant failure risk mitigation. The data are collected from the production line of a Chinese EMS provider with the aid of their industrial engineers and field experts.
Numerical example
Data collection of infant failure risk
From the failure database, the components that suffer from infant failures are identified through warranty data analysis, and their design requirements and manufacturing parameters are acquired from product data management system and enterprise resource planning system. The infant failure risk data of control module 1 are shown in Table 1, and these collected data are crucial and provide the foundation to model the infant failure risk accurately.
Infant failure risk data of control module 1.
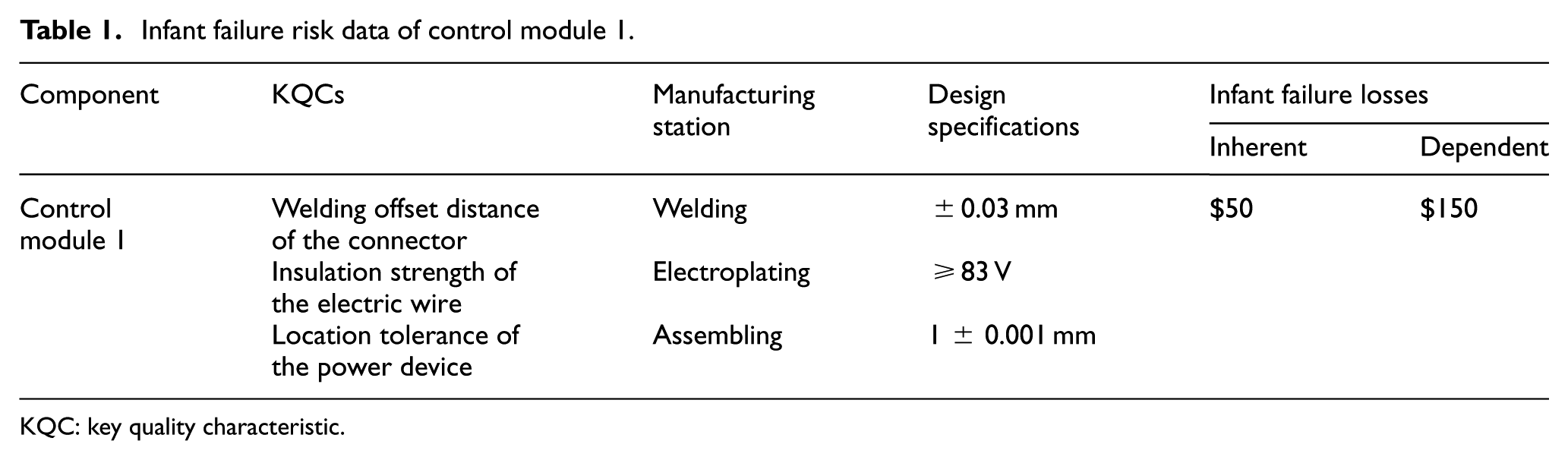
KQC: key quality characteristic.
Analysis of infant failure risk
As shown in Figure 3, the second module of the control system is the hot backup for the first module. For the power supply system, the main valve will be opened by the hydraulic system after receiving the signal from the control system. Therefore, to ensure normal operation of the main valve, the hydraulic system must be at the normal working condition before the main valve starts to work. Consequently, the failure of the hydraulic system will result in the failure of the main valve. That is, a functional dependency exists between the hydraulic system and the main valve. The dynamic logic gates, including HSP and FDG, are employed to describe the sequential rules and dynamic behavior of the system. In this study, on the basis of the failure mechanism analysis of the system, the “complex EMS task failure” is selected as a top event for FT analysis. The DFT of this sample system is built to represent the infant failure risk, as shown in Figure 4.

DFT model of the complex EMS.
In Figure 4, S represents the complex EMS task failure, Y1 represents the control system failure, Y2 is the powertrain system failure, Y3 represents the hydraulic system failure, and Y4 represents the power that is not transmitted to the sub-ordinate unit. The meanings of notations X1–X8 in Figure 4 are listed in Table 2.
Inherent infant failure probabilities of components based on KQC variations.

KQC: key quality characteristic.
After the representation of infant failure risk, the inherent and dependent infant failure risks can be analyzed subsequently. First, for components X1–X8, the process variation data of their KQCs can be collected, as shown in Table 2, and equations (3)–(10) can be used in modeling these variation data to represent the inherent infant failure rate of each component.
The inherent infant failure rate of the components is used as the input information of the root nodes. The BN, which is transformed from DFT in section “Data collection of infant failure risk,” can be constructed using the “AgenaRisk. 6.2, Revision 2077” to model the dependent infant failure probabilities of the components using equations (15) and (16). The results are shown in Figure 5.

Example of a manufacturing system.
From the collected failure cost data from the early usage of the EMS and its components, the inherent and dependent infant failure losses can be analyzed using equations (11) and (17).
Calculation of infant failure risk
After the inherent and dependent infant failure risk analysis, the infant failure risk can be calculated using equations (1)–(3). The results are shown in Figure 5. From the figure, the infant failure risks of the EMS and its components increase over time, and the infant failure risks of X8 “hydraulic motor failure,” X4 “reducer failure,” and X5 “pump failure” are the main contributors to the infant failure risk of the EMS. The high infant failure risks of X4 and X5 are possibly due to the quality variations of their KQCs during the manufacturing process. The high infant failure risk of X8 derives not only from the quality variations but also from the failure dependency with X6, which increases the infant failure risk.
Sensitivity analysis
A sensitivity analysis of the infant failure risk on the quality variation of KQCs and failure dependency for component X1 is performed to show the robustness of the proposed approach. Figure 6 shows the analysis results.

Sensitivity analysis of infant failure risk for the component X1: (a) infant failure risk versus time with different reliabilities of exterior defects, (b) infant failure risk versus time with different interior densities η, and (c) infant failure risk versus time with different failure dependencies.
The effects of the quality variation of KQCs on infant failure risk can be characterized and specified by the reliability of exterior defects and the density of interior defects. Therefore, in comparison with the original level of the reliability of the exterior defects
In comparison with the normal failure dependency (with one hot backup X2 and considering the system-dependent failure), other three dependency conditions, namely, no failure dependency (with no hot backup and not considering the system-dependent failure), slight failure dependency (with two hot backups and considering the system-dependent failure), and strong failure dependency (with no hot backup and considering the system-dependent failure), are used to analyze the remarkable influence of the failure dependencies on infant failure risk (Figure 6(c)). Correspondingly, four infant failure risk curves are plotted under various failure dependencies to illustrate the correlated sensitivity and robustness. With a strong failure dependency, the infant failure of component X1 more likely to result in complex EMS failure and cause additional severe consequences, thereby indicating a high level of infant failure risk. By contrast, when the failure dependency of component X1 is slight and inexistence, as denoted by the blue and green curves, a low level of infant failure risk is guaranteed. These quantitative analysis conclusions will help decision makers of engine manufacturing to determine the effects of different manufacturing quality variation control measures and product design optimization approaches.
Comparative study
The infant failure risk of the EMS can simply be regarded as the expected infant failure costs, and the cost-based FMEA is a common method to represent these expected costs based on the risk perspective. Therefore, the infant failure risks of the EMS using the proposed method and the cost-based FMEA and the actual infant failure costs determined using warranty data are analyzed comparatively, as shown in Figure 7.

Comparison of the infant failure risk based on the proposed method, cost-based FMEA, and actual condition.
From the figure, the proposed method has a better effect than the cost-based FMEA in predicting the infant failure risk (expected infant failure costs). The root mean square of the proposed method curve compared with the real cost curve is 36.4540, and the closeness degree of the cost-based FMEA curve compared with the real costs curve is 72.6348, considering that the real costs are high because several human or accidental conditions cause the infant failure. Moreover, the infant failure risk is underestimated using the cost-based FMEA because (1) infant failure is analyzed subjectively or using failure data directly without considering the effects of quality variations and (2) components are analyzed independently without considering failure dependency. Thus, the proposed method can model and estimate the infant failure risk accurately by simultaneously considering these two issues.
Another way to analyze the infant failure risk is to rank the criticality of the components based on the simulated expected cost values, where the components associated with the highest loss cost values are ranked as the most critical. Figure 8 illustrates the Pareto criticality ranking at the component level using the proposed method and the cost-based FMEA. From the figure, the top three critical components of infant failure analyzed using the proposed method are X8, X4, and X7, which account for 59.6% of the total expected cost of the EMS failure, whereas the top three critical components of infant failure analyzed using the cost-based FMEA method are X4, X3, and X5, which account for 55.3% of the total expected cost of the EMS failure. The result implies the need to implement relatively robust maintenance strategies, which are targeted at mitigating infant failures of these critical components. In this way, the total expected failure cost will be mitigated for the EMS. From the analysis of warranty data of infant failures of the EMS, 61% of the cost derives from infant failure of X8, X4, and X7, and 42% of the cost derives from X4, X3, and X5. This result implies that the proposed method has a better effect on ranking the criticality of components for infant failure risk mitigation compared with the cost-based FMEA method.
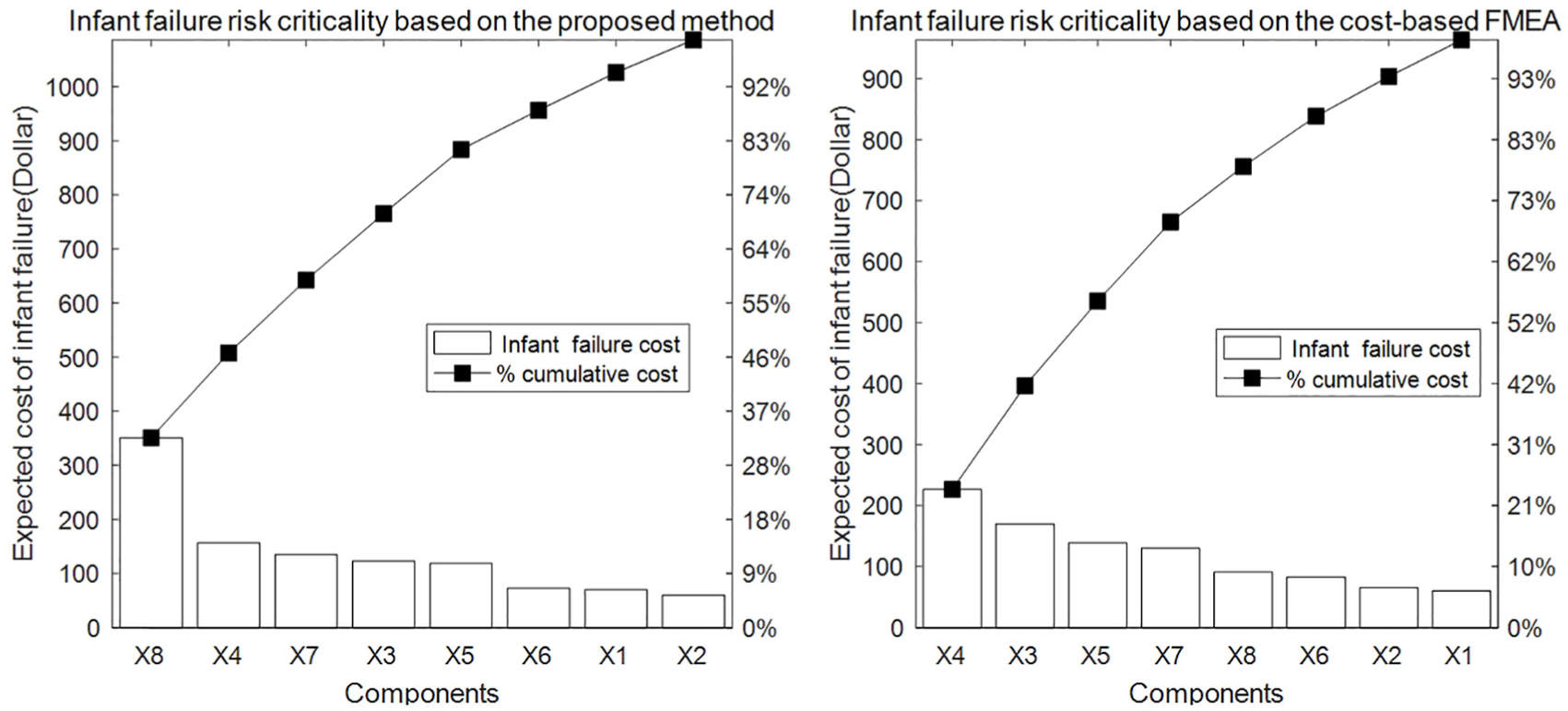
Pareto analysis depicting the criticality ranking at the component level.
Conclusion
Product infant failure is the most crucial part of product quality risk that critically affects customer satisfaction. The failure is inherently caused by manufacturing quality variation and can be enlarged using failure dependency. Therefore, in this work, the formation mechanism of infant failure risk is primarily clarified, and on the basis of its mechanism, the infant failure risk is categorized into two aspects, namely, inherent and dependent risks. The inherent infant failure risk is analyzed based on the SoV by considering quality variation, whereas the dependent infant failure risk is analyzed based on a BN by considering functional failure dependency. Furthermore, a case study of an illustrative EMS is introduced to verify the applicability of the proposed method. The comparative result shows that the proposed method can model and predict the infant failure risk more accurately than the cost-based FMEA. Moreover, the Pareto criticality ranking implies that the proposed method has a better effect on ranking the criticality of components for infant failure risk mitigation.
However, this study still has some limitations that impede our future research plans. To improve the portability, two following conditions should be considered in future works:
Incorporate additional various factors, such as customer satisfaction, when considering the effect of infant failures.
Optimize the process control measures with the constraints of costs based on the results of infant failure risk modeling.
Footnotes
Handling Editor: Vesna Spasojević Brkić
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This study was supported by grant 61473017 from the National Natural Science Foundation of China and a general project (no. 6140002050116HK01001) funded by the National Defense Pre-Research Foundation of China.