
Abstract
A novel speed control method based on sliding mode control and disturbance observer is studied for permanent magnet synchronous motor drives. Different from the conventional speed and current cascade control structure in the field-oriented vector control, the new controller adopts the single-loop control structure, in which the speed and quadrate axes current controllers are combined together. First, a multiple-surface sliding mode controller is designed for the speed control system of permanent magnet synchronous motor. Although the sliding mode controller has the strong robustness for the matched disturbance in the system, it still cannot deal with mismatched disturbance effectively, such as external load disturbance and some parameter variations. Thus, the disturbance observer is introduced to estimate the disturbance in the motor, which is designed by combining the proposed sliding mode controller. Finally, the effectiveness is tested under various conditions by both simulation and experiment. The results show that the designed controller has the fast transient response and robustness under different operating conditions.
Keywords
Introduction
Permanent magnet synchronous motor (PMSM) fed by pulse-width modulation (PWM) inverters is widely used in industrial fields, such as electric vehicle, 1 wind generator, 2 and robot. 3 It has advantages of high efficiency, superior power density, and high reliability. The field-oriented vector control is usually employed in the motor drives, and normally, it results a cascade control structure with the inner current loop and the outer speed loop. It is generally known that the linear proportional–integral (PI) control method is popular in the speed and current control of PMSM. However, the PMSM is a nonlinear system with unavoidable disturbance and parameter variations.4,5 Thus, with the development of control technology,6–8 the linear control technology is difficult to obtain the satisfactory performance in the practical motor system. 9
Sliding mode control (SMC), as a special mode of variable structure system, is extensively employed in power electronics and motor drives for its perspicuous conception and the powerful ability to reject disturbance. In the study of Zhang et al., 10 a sliding mode speed controller based on the novel reaching law is presented for PMSM, and a sliding mode observer is used to estimate the uncertainties. A terminal sliding mode speed controller is designed, 11 and the system can achieve the finite time convergence. Meanwhile, to reduce the chattering, a disturbance observer (DOB) is designed for the feed-forward compensation. A fractional order SMC method is used in PMSM, and it can also achieve the fast speed regulation. 12 A global integral SMC strategy with load torque observer is proposed for the speed control of PMSM, 13 and the dynamic performance is improved significantly. In addition, the SMC methods are applied to the current control of PMSM,14–16 and the satisfactory control performance with good transient dynamic and strong robustness is also verified.
It is worth pointing out that the existing SMC strategies above are used either in the speed loop or in the current loop, and the cascade control structure is adopted in the PMSM drive system. But the controllers must be tuned separately from the inner to the outer control loop. 17 In the early time, the design of the control period of the speed loop is greater than the current loop in PMSM control systems. However, in more recent years, this kind of difference is becoming smaller and even disappearing. Thus, a single-loop structure can be seen as an alternative scheme which merges speed loop and current loop into one loop. 18 In this article, a novel SMC method based on the single-loop structure is proposed, and the speed loop and q-axes current loop are designed together instead of the traditional cascade control.
However, the novel sliding mode controller based on single-loop structure also produces new problems. In the traditional SMC, the sliding mode motion is only insensitive to the matched uncertainties, which means the uncertainties exist in the same channel as that of the control input.19,20 Apparently, the motor control system consists of the external load disturbance and the parameter variations, and they may not satisfy the matched conditions in the single-loop control. Thus, the well-known robustness of SMC cannot be ensured. To restrain the mismatched uncertainties, many methods have been proposed recently, such as linear matrix inequality (LMI)-based control 19 and integral SMC, 21 but these methods are achieved at the price of sacrificing the nominal performance of the SMC. 22 The disturbance observer technology may be a candidate solution for this problem. It can estimate the lump disturbance of the system, and corresponding compensation is generated by making use of the estimate. 23 Up to now, various disturbance observer methods have been used in the speed or current control of PMSM drive system.24–26 But the designed observers above are only applicable for the matched uncertainties. Recently, the disturbance observer control methods27,28 for the mismatched uncertainties have been thoroughly studied. The researches show that the mismatched disturbance can be eliminated from the output by designing the observers for the feed-forward compensation, and the system performance will not be effected simultaneously. In the study of Liu et al., 29 a sliding mode controller is designed by combining the speed and current control is proposed, and a nonlinear disturbance is designed to estimate the lump disturbance, the simulation results show that the system has a nice dynamic performance and a strong anti-disturbance ability.
In this article, a novel speed control method based on SMC and disturbance observer is proposed. First, the multiple-surface sliding mode feedback controller is implemented for the speed and current single-loop control instead of the traditional cascade control in the vector control of PMSM. This method can realize the fast speed and current control for the PMSM drives. Then, for the matched and mismatched uncertainties in the drive system, a disturbance observer by combining the proposed sliding mode method is designed to estimate the lump disturbance. Finally, the effectiveness is validated by simulation and experiment in the laboratory. The contribution of the paper can be summarized as follows: (1) a novel sliding mode single-loop control method is proposed for PMSM control system instead of the traditional cascade control structure. In this method, the speed and current controllers are designed together. (2) The new disturbance observer is introduced to the SMC of PMSM to deal with the lump disturbance of motor drive system. (3) The controller has the strong disturbance rejection ability for all of the uncertain parameters and load torque. (4) Compared with the traditional cascade control method, the designed controller is simple and the controller parameters are easy to be regulated.
The paper is organized as follows. Section “The mathematical model of PMSM” defines the mathematical model of PMSM. Section “Design of speed controller for PMSM” presents the design process of speed controller based on the sliding mode single-loop control and the disturbance observer. The simulation and experiment are implemented in section “Simulation and experiment,” which is followed by conclusion in section “Conclusion.”
The mathematical model of PMSM
According to rotor field-orientation, the mathematical model of PMSM consists of electrical dynamic model and mechanical dynamic model, which can be described in synchronously rotating frame as


where
Usually, in order to ensure a constant flux operating condition, the reference d-axes current

In order to realize the speed and current control the state variable is defined as

where
The PMSM control system structure investigated in this work is shown in Figure 1. A single-loop control strategy based on SMC and disturbance observer is designed instead of the traditional cascade control structure, and the PI control method is used in the d-axes current control.

Block diagram of PMSM control system.
Design of speed controller for PMSM
In the paper, the control objective is to design a controller to realize the speed tracking regulation of PMSM. Simultaneously, the controller has the ability of rejecting the disturbance. The problem will be solved in two steps. In this section, a sliding mode feedback controller is designed by combining the speed and q-axes current control. The speed feedback controller u is designed using the recursive method and the SMC method. Because the control input u is in the current model from equation (1), to realize the speed control, first, define

where
Using the recursive method, meanwhile, to realize the q-axes current control, select the virtual control input as

where
where
In order to realize the speed tracking control, according to the SMC principle, an exponential reaching law is selected as

where
From equations (7) and (8), the speed controller can be derived as

where
The reference voltage
In the practical motor drive system, the disturbance is unavoidable and undetectable, such as parameter uncertainties and load torque. To strengthen the robustness performance of speed feedback controller (9), a disturbance observer is structured to estimate the disturbance
According to Ginoya et al.,
28
the disturbance observer for the disturbance


where
The designed observer could effectively estimate the disturbance caused by the parameter uncertainties and the external disturbance in the drive system, and it can also suppress the periodic disturbance for the reason that the variation of the disturbance is not assumed to be 0. 27 Thus, the controller can provide the better steady-state performance.
Simulation and experiment
To demonstrate the effectiveness of the proposed sliding mode speed controller with disturbance observer, simulation and experiment-based dSPACE have been performed on the PMSM experimental platform. The parameters of the PMSM used in the simulation and experiment are given in Table 1.
Parameters of PMSM.

PMSM: permanent magnet synchronous motor.
Simulation and analysis
In this section, the simulation of the PMSM control system is completed in MATLAB, and three speed controllers, that is, cascade control based on PI controller, the traditional sliding mode speed controller based on exponential approach law with load torque observer and the proposed sliding mode controller with disturbance observer (SMC+DOB), are designed and compared. For a fair comparison, the d-axes current loop has the same parameters in each method. The gains of the PI controller, traditional sliding mode speed controller, and the proposed sliding mode single-loop controller are all obtained by trial and error so as to achieve satisfactory performance. The reference speed is given as n = 1000 r/min, and it is passed through a second-order linear filter as
Simulation results based on PI controller: (a) motor speed, (b) dq-axes current, (c) motor speed with load disturbance, and (d) dq-axes current with load disturbance.
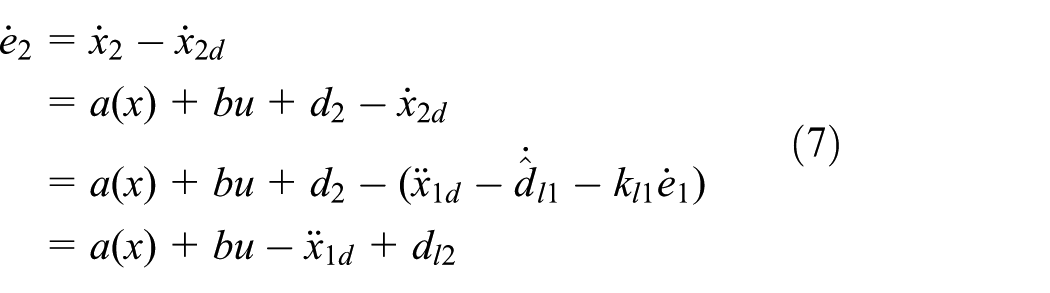
Simulation results based on traditional sliding mode speed controller with load torque observer: (a) motor speed, (b) dq-axes current, (c) motor speed with load disturbance, and (d) dq-axes current with load disturbance.

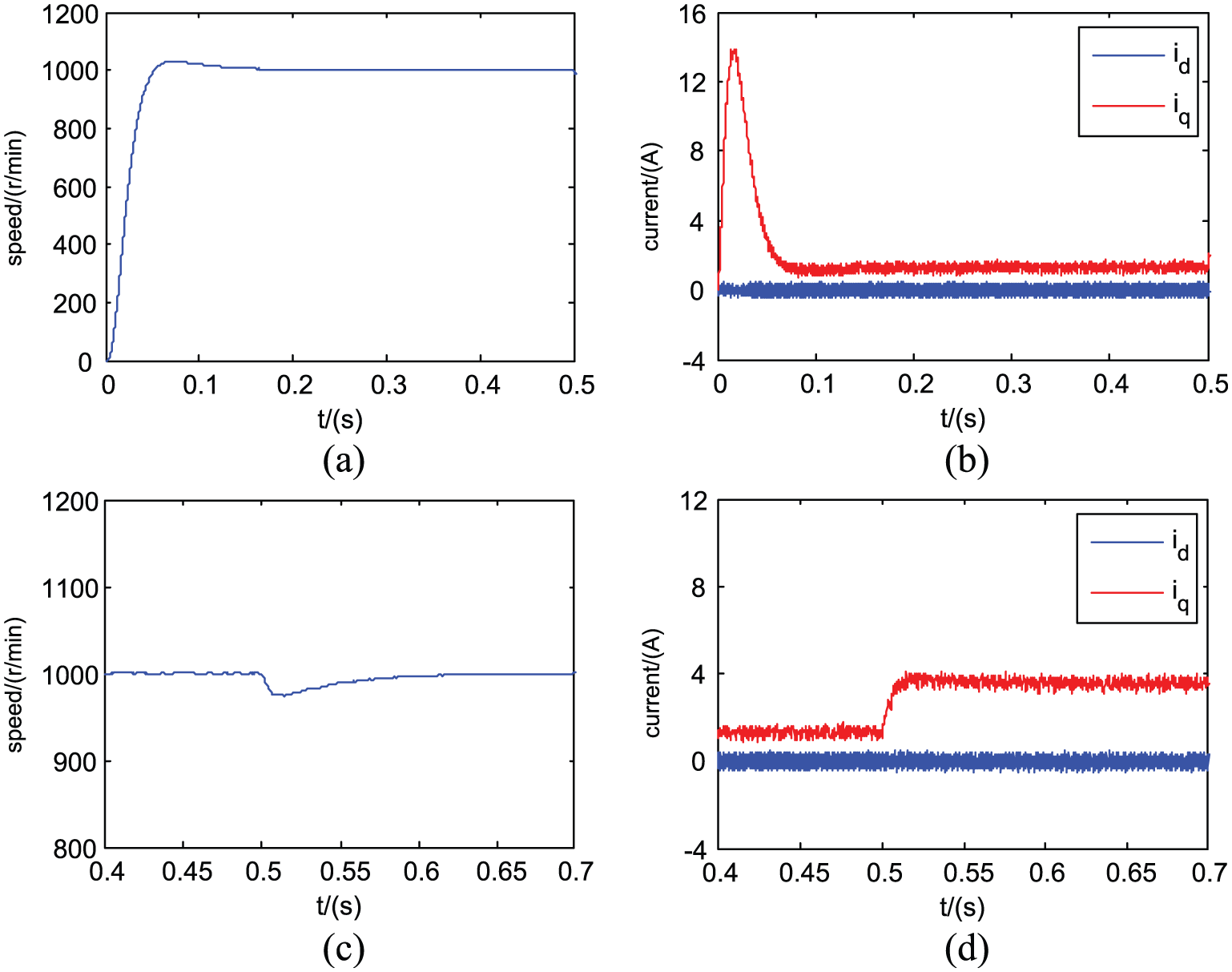
Simulation results based on the proposed SMC + DOB controller: (a) motor speed, (b) dq-axes current, (c) motor speed with load disturbance, and (d) dq-axes current with load disturbance.
As shown in Figures 2 –4, compared with other control methods, the proposed SMC+DOB controller gives a shorter settling time with a smaller overshoot when the motor is started. It can also be seen that when the load torque is changed at t = 0.5 s, the SMC+DOB controller has the less speed fluctuations, and the motor speed can recover to the reference value with the shorter time. Meanwhile, the q-axes current has the faster response speed under the load disturbance.
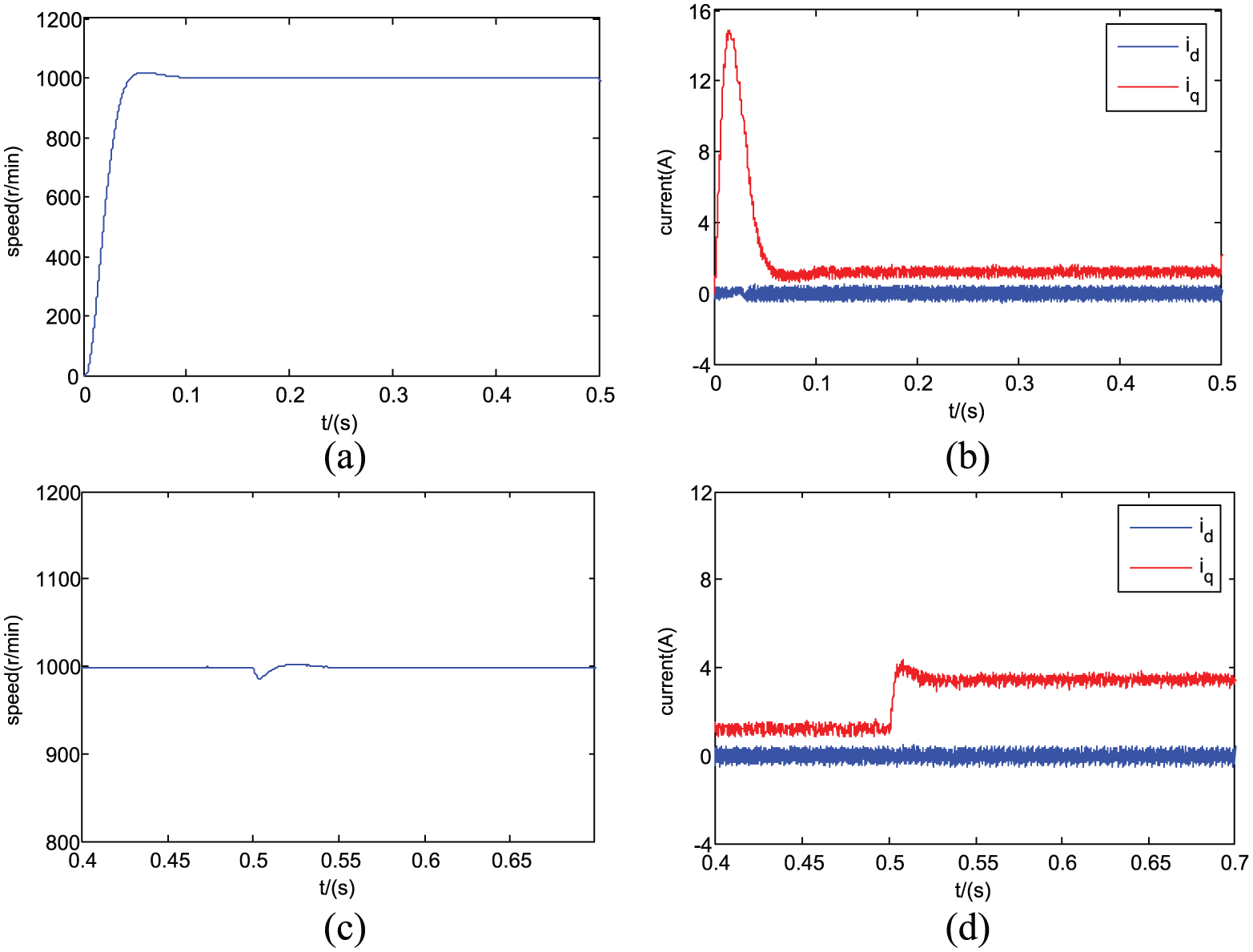
To further illustrate the robustness of SMC+DOB controller for PMSM with parameter uncertainties, the dq-axes inductances, the rotor flux, and the moment of inertia are changed in the motor, respectively, and the parameters in the controller are not changed. Figure 5 shows the simulation result when the values of dq-axes inductances are changed to 150% of the nominal values. Figure 6 shows the result when the rotor flux is changed to 80% of the nominal value. Figure 7 shows the result when the moment of inertia is changed to 200% of the nominal value.

Simulation results based on the proposed SMC + DOB controller when dq-axes inductances are changed: (a) motor speed and (b) dq-axes current.

Simulation results based on the proposed SMC + DOB controller when rotor flux is changed: (a) motor speed and (b) dq-axes current.
Simulation results based on the proposed SMC + DOB controller when the moment of inertia is changed: (a) motor speed and (b) dq-axes current.
As shown in Figures 5–7, when the motor parameters are changed, the motor control performance is almost unaffected, and the motor speed can quickly reach the reference value. The d-axes current is maintained equal to zero. The speed and current response are not affected by the parameter uncertainties. The results prove that the designed SMC+DOB controller has strong robustness for the disturbance.
Experiment and analysis
The experimental platform of the PMSM drive system is given in Figure 8. It consists of a six-pole 0.72 kW interior PMSM coupled to a dynamometer, the inverter, and the motor controller-based dSPACE. The phase current is measured by the Hall-effect sensors. A resolve is used to measure the rotor speed and absolute rotor position. In the experiment, the load torque is provided by hysteresis dynamometer. In the designed sliding mode controller with disturbance observer, the controller parameters are given as
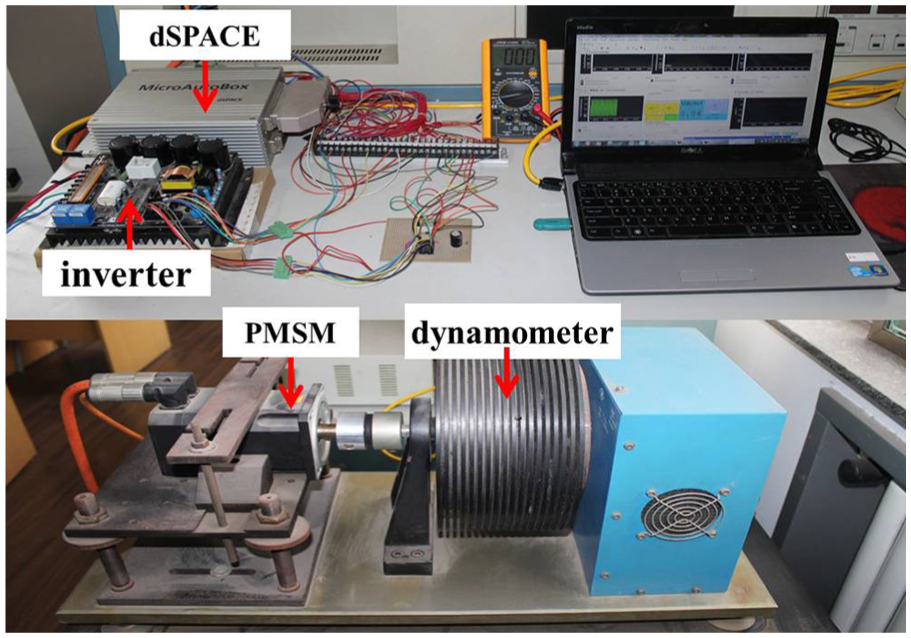
Experimental test platform.
First, the reference speed is given as 1000 r/min, and the load torque is 0.5 N m. The comparison between SMC+DOB control and PI control has completed. To verify the performance of the proposed controller with respect to load disturbance, the load torque is increased suddenly to 1.5 N m when the motor is running. The experimental results of two methods are shown in Figures 9 and 10, respectively.

Experimental results based on PI controller: (a) motor speed, (b) dq-axes current, (c) motor speed with load disturbance, and (d) dq-axes current with load disturbance.
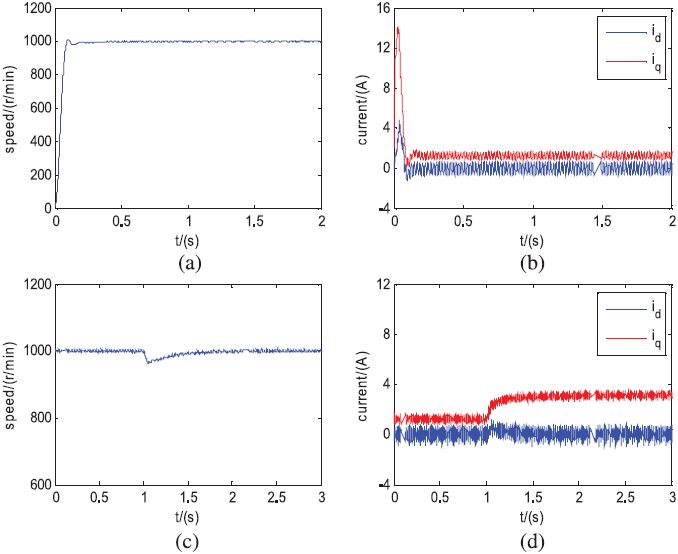
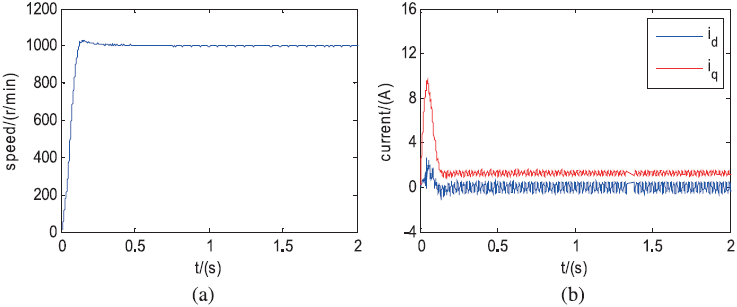
Experimental results based on the proposed SMC + DOB controller: (a) motor speed, (b) dq-axes current, (c) motor speed with load disturbance, and (d) dq-axes current with load disturbance.
As shown in Figures 9 and 10, when the motor starts, a large starting current is proposed in the motor. Compared with PI controller, the controller based on SMC+DOB has the faster transient response and the smaller overshoot. When the load torque is added suddenly, the motor speed with PI controller has a bigger depreciation and it recovers to the reference value in a longer time length. The SMC+DOB controller has better disturbance rejection ability. In addition, the q-axes current has the smaller fluctuation with the proposed controller, and it has the better steady-state behavior.
To verify the robustness of the proposed method under parameter variation. First, in the controller, the dq-axes inductances are changed to 75% of the rated value, meanwhile, the rotor flux is changed to 120% of the rated value. The experimental results are shown in Figure 11. Then, the moment of inertia is set to 200% of the rated value. The experimental results are shown in Figure 12.

Experimental results based on the proposed SMC + DOB controller when dq-axes inductances and rotor flux are changed: (a) motor speed and (b) dq-axes current.
Experimental results based on the proposed SMC + DOB controller when the moment of inertia is changed: (a) motor speed and (b) dq-axes current.
As shown in the figures, the large perturbations of the parameters have few influences, the motor still has the fast response, and the speed can quickly converge to the reference value. Meanwhile, the controller also has the good current control performance.
Conclusion
A novel sliding mode single-loop speed controller with disturbance observer is designed for PMSM drives instead of the traditional speed and current cascade control structure. In this method, the sliding mode controller is used for the feedback control, which has the simpler control structure as the speed loop and q-axes current loop are combined together, and the controller parameters are easier to be adjusted. Then, considering the lump disturbance including parameter uncertainties and load disturbance in the motor system, a new disturbance observer is designed for the compensation control. The effectiveness is verified under different conditions by simulation and experiment. The results show that the motor has the good response performance and the strong anti-disturbance performance. In the future, the maximum torque per ampere (MTPA) and flux-weakening control will be attempted in the designed sliding mode single-loop controller, which may improve the motor efficiency and the speed range of interior PMSM.
Footnotes
Handling Editor: Hamid Reza Karimi
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This project was supported by National Natural Science Foundation of China (61703222, 61573223) and the China Postdoctoral Science Foundation (2018M632622).