
Abstract
This study aims to propose and investigate a theoretical maximum traffic flow method. Furthermore, we propose a merging timing control based on the results obtained from this method, which are verified using actual automated guided vehicles. The results (micro-level optimization) enable automated guided vehicles to achieve a fabrication level optimization (macro-level optimization). Engineers working in the field of automated guided vehicles have found that there is an optimal headway distance that achieves a maximum traffic throughput when automated guided vehicles operate with merging points. “Zipper merging” is known to be a suitable merging method resulting from “Jamology.” In this study, first, we will verify the results using the “Zipper merging” simulation model. Second, we develop a mathematical model and verify its simulations and experiments using actual automated guided vehicles. Finally, we develop a merging timing control to augment transfer flow and verify the effects using a small full fabrication simulation. We predict that this control will improve factory model throughput when used in practical applications.
Introduction
In semiconductor industries, wafers are processed using various pieces of equipment and transferred between equipment by automated guided vehicles (AGVs) in an automated material handling system (AMHS). 1 In this study, transfer refers to the movement of wafers, whereas traffic refers to AGV movement. AGVs operate along rails in the AMHS (see Figure 1), which includes numerous intersections, such as merging and diverging points. The rails consist of segments, which are the sections between two points, as shown in Figure 2. Blocking area consists of two segments at an intersection. Only one AGV can enter a blocking area at a time to avoid collisions with the other AGVs. AGVs without permission must stop at the entrance of the blocking area. Thus, traffic jams occur at intersections where there is a gathering of AGVs, as shown in Figure 3. Therefore, researchers are aware that there is a limit to the number of AGVs that can approach a merging point, which lessens the number of traffic jams.

AMHS and the essential parts of the system.

The relationship between segments and the blocking area.

A schematic showing the occurrence of traffic jams at a merging point.
Several methods have been proposed to analyze and/or control the entire transportation system. These methods can be categorized into three approaches, which are simulation, statistical, and optimization based. The simulation-based approach is one of the most popular methods currently in practice.2,3 This approach is extremely time-consuming because it requires high model detail as well as several trials and errors to obtain a good result. This problem has been solved using generic models. 4 However, a good result does not always reflect true best performance because it is a result of trials and errors. Queueing network theory and Markov models are often used as a statistical approach.5,6 These methods provide good results for mean performance values, such as transportation throughput, but do not provide the maximum performance values either. Previous studies have modeled AGV systems as resource-oriented petri nets or integer linear programming problems, which are categorized as the optimization approach.7–9 These methods provide a maximum theoretical performance. However, the processing time can be too long for use in a large semiconductor factory. An AGV system has been modeled as a linear programming problem to reduce the processing time but provides a maximum theoretical throughput. 10 To achieve a maximum theoretical throughput, the method requires that AGVs have a maximum throughput at the merging and loading/unloading points. However, this study does not provide the maximum throughput at merging points, which was one of the challenges in this study.
After determining the maximum throughput, we must find a method to achieve it practically. To control AGV throughput at merging points, the timing of AGVs entering the merging points should be controlled, which is the second challenge in this study. Solutions to this problem can be divided into three approaches: (1) the optimal scheduling approach, 11 (2) the control theory–based approach, 12 and (3) the simulation-based and/or statistical approach.13–15 In a study, AGVs were modeled around a merging point as an integer linear programming problem, providing AGV schedules, which describe AGV movement. 11 AGVs, however, cannot maintain the schedule due to modeling errors caused by certain methods that divide continuous rails into discrete sections. AGV trajectory control was provided to avoid AGV collisions. 12 Although it is a good method, the AMHS scenario from this previous study is different from the scenario in this study. For example, there are blocking areas, which are not defined in the study, in the AMHS that accept only one AGV. Queueing network theory and Markov models were used as the statistical approach. 13 In this study, vehicles decide whether to stop or go at merging points. However, AGVs can be fully controlled by an upper-level controller in this study. There is now a new approach to analyze and solve traffic jams, called “Jamology.” 14 “Jamology” provides important information about traffic jams. For example, it provides information about the relationship between AGV density and road traffic flow and that zipper merging is effective at merging points. 15 Our previous study provided methods to encourage maximum traffic flow by applying the principles of “Jamology” to AMHS. 16 AGVs were considered as a self-driven particle, which suggests that AGVs move as they wish.13–15 On the other hand, AGVs are regulated by an upper-level controller. Our previous study considers these differences.
This article builds on previous models to obtain maximum traffic flow in actual AMHSs. The model is not only verified with simulations but also with actual AGV experiments. Furthermore, a merging timing control method is developed to utilize the models in actual scenarios. This method is evaluated via simulations to observe whether it augments the semiconductor fabrication transfer flow.
Traffic jam analysis
Problem definition
AGV specification
AGVs run along pre-installed rails as shown in Figure 1. AGV length and velocity are expressed as non-negative values, that is,

where u is the control input (m/s2) defined as
AGV specifications.

AGV: automated guided vehicle.
Certain AGV conditions and the appropriate decision to avoid AGV collisions.
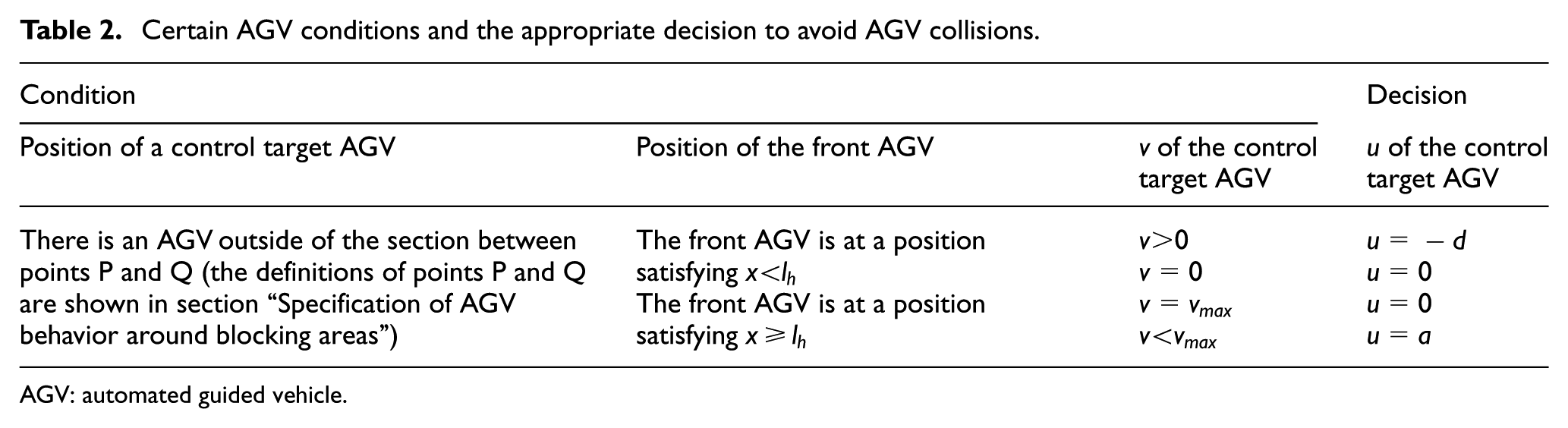
AGV: automated guided vehicle.
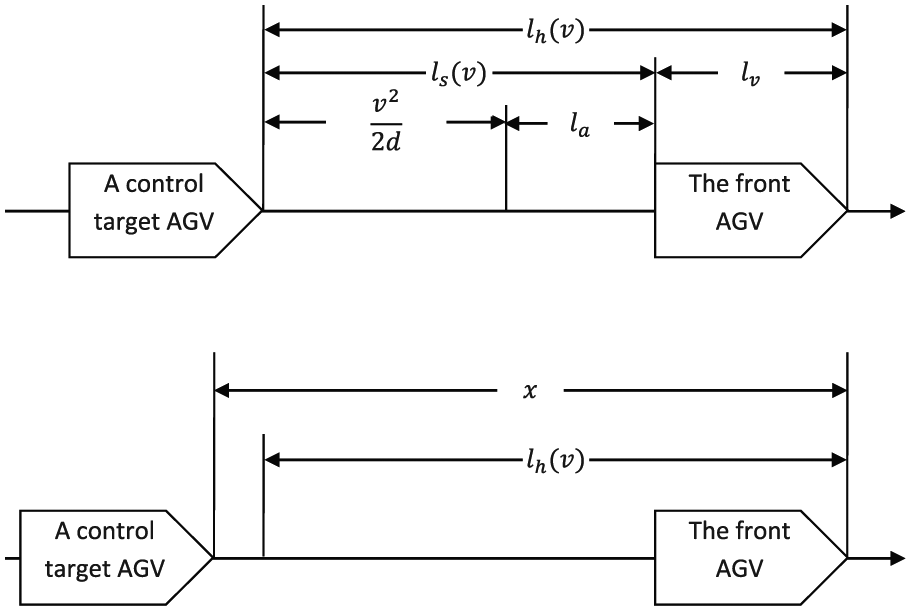
The relationship between distances involved with AGVs.
Specification of AGV behavior around blocking areas
Figure 5 illustrates a scenario where AGVs are merging into a blocking area. Blocking areas are positioned at all merging points. A blocking area allows only one AGV to enter at a time so as to avoid AGV collisions. Points Q1 and Q2 are entrances and point R is an exit.

A scenario where AGVs merge into a blocking area.
To enter a blocking area, an AGV must have permission. There is only one permission at a merging point. The distance between point P1 or P2 and point Q1 or Q2 is the AGV braking distance, such that
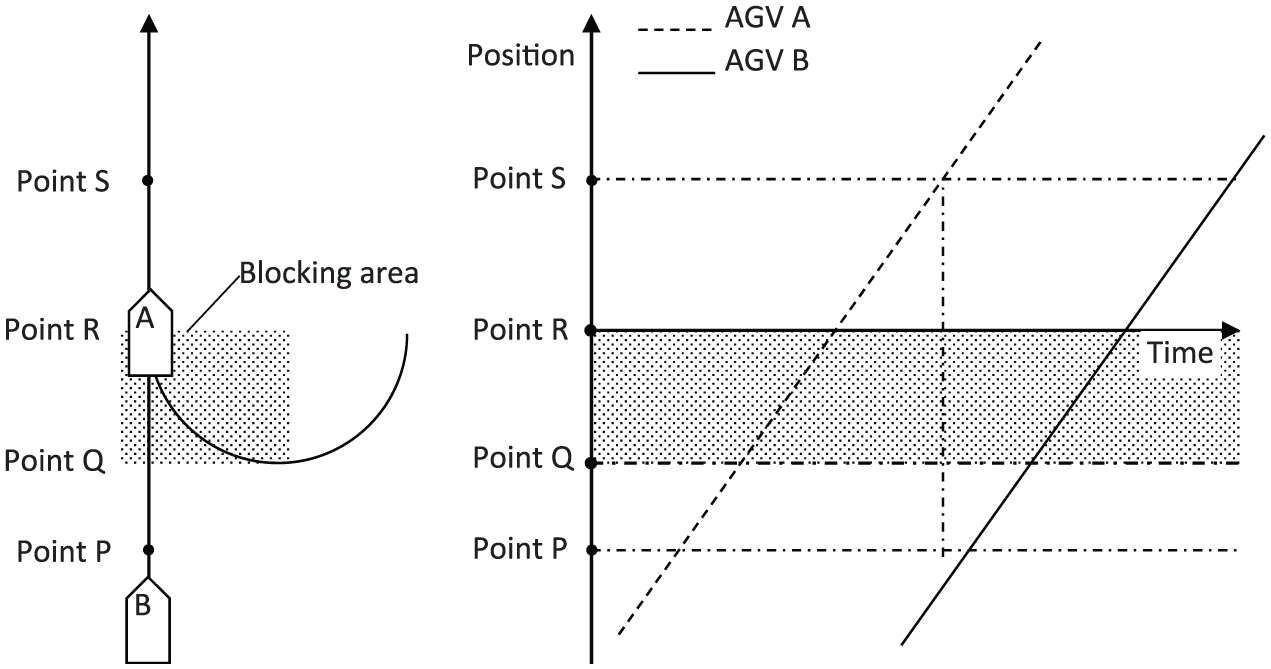
AGV B trajectory when AGV B is permitted to enter the blocking area when the AGV arrives at point P.

AGV B trajectory when AGV B is permitted to enter the blocking area during AGV deceleration.

AGV B trajectory when AGV B is permitted to enter the blocking area when the AGV stops.
Decisions to avoid AGV collisions.
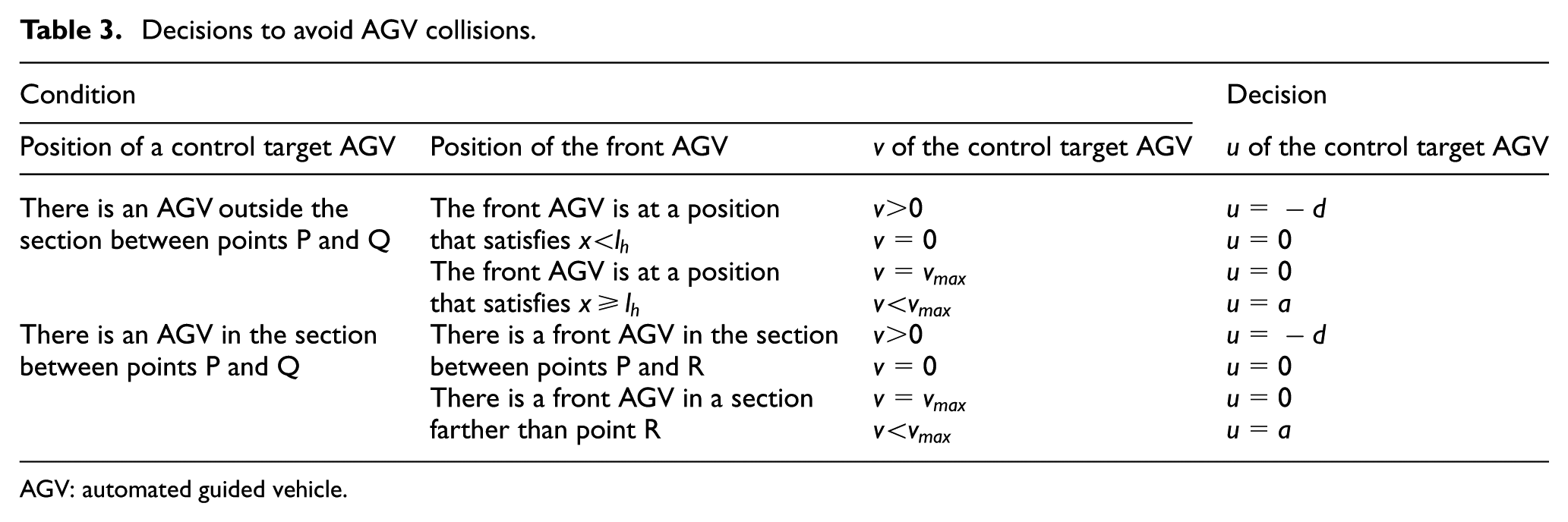
AGV: automated guided vehicle.
Headway distance, x, defined virtually around a merging point.
Traffic flow comparison at a merging point
AGV system controller engineers at Murata Machinery empirically know that traffic jams occur if x is too small at merging points. In this section, we verify the knowledge from their experiences by simulations that are modeled as scenarios around a merging point. AGVs disappear in the lower section of the merging point in the simulation. Thus, traffic jams downstream of the merging point do not occur and do not affect traffic around the merging point. Figures 10–12 illustrate situations where x is defined as 4.040, 2.820, and 1.000 m, respectively. The other conditions are listed in Table 4.

Simulation at

Simulation at

Simulation at
Conditions for traffic flow analysis at a merging point.

Out of the three scenarios, it can be seen from Figure 11 that the headway distance, after the merging point, is the shortest.
We model two types of simulations in this section: (1) with only two AGVs (see Figure 13) and (2) with multiple AGVs for 1 min (see Figure 14). The inverse of the time period between AGVs at the blocking area exit is measured as traffic flow

Traffic flow with two operating AGVs.

Traffic flow with multiple AGVs operating for 1 min.

Simulation results with various x parameters.
AGV model behavior development around a merging point
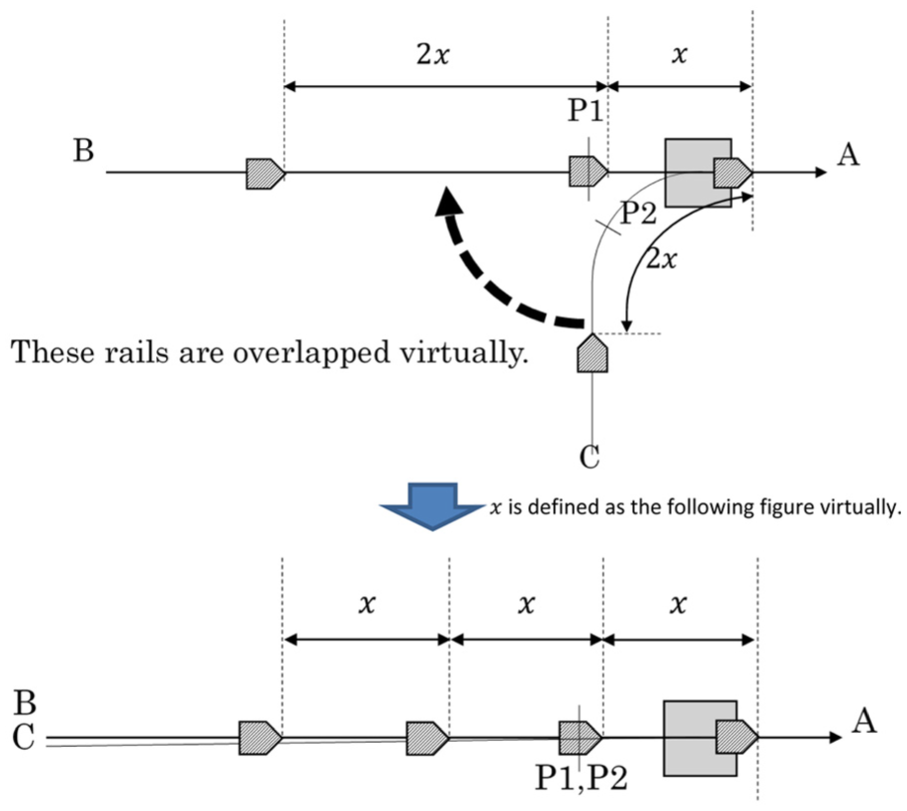
Simulations in section “Traffic flow comparison at a merging point” show that AMHS AGVs conform to the results of “Jamology.”“Jamology” proposes the concept of “Zipper merging,” 12 which is a merging style where only one AGV enters a merging point, thus improving the AGV flow. This study uses this merging style as shown in Figure 9. In addition to this, this study considers that AGVs have a finite acceleration and deceleration and that AGVs’ positions are controlled by the AMHS controller. Thus, this study focuses on the relationships between AGV headway distance, x (m), and AGV traffic flow, F (1/s).
A rail is virtually superimposed on the other rail to define the headway distance between merging AGVs as shown in Figure 9. P1 and P2 are the limit points for AGVs operating with a velocity, v, in order to stop at the blocking area entrance. Here x is treated as the headway distance between the front and the rear AGV when the rear AGV is at the limit point P1 or P2. x cannot be smaller than the safe headway distance,
We develop, for several cases, the mathematical model that provides a relationship between x and F as follows
Case 1.
In this case, rear AGVs, which arrive at P1 or P2, are permitted to enter the blocking area because the front AGVs have already finished communication and passed permission to the rear AGV. Thus, traffic flow is written as

Case 2.
In this case, rear AGVs are not permitted to enter the blocking area because front AGVs are still operating in the area. Thus, rear AGVs decelerate until they receive permission. Front AGVs exit the blocking area while rear AGVs decelerate. Just after the front AGVs relinquish permission to the rear AGVs, the rear AGVs reaccelerate until they have reached a maximum velocity,
In this case, the behavior when the number of AGVs is quite small (see Figure 13) is different compared with a case where there are a large number of AGVs (see Figure 14). Thus, we divide this case into Cases 2-1 and 2-2:
Case 2-1. A small number of AGVs approach a merging point

In this case, front AGVs relinquish permission while rear AGVs decelerate. Thus, rear AGVs begin to reaccelerate before they completely come to a stop. The transfer flow can be obtained using basic Newtonian mechanics

where

In this case, front AGVs relinquish permission after rear AGVs have stopped to wait at the entrance. We can calculate the transfer flow using basic Newtonian mechanics

Case 2-2. Multiple AGVs approach a merging point
This case is the focus of our study, that is, the situation where AGVs rush to a merging point

In this case, front AGVs relinquish permission while rear AGVs decelerate, and front AGVs do not delay rear AGVs more than the front AGVs have been delayed. Considering the above constraints, we obtain the transfer flow from equation (3)

In this case, the front AGVs cause the rear AGVs to have more delay than their own delay. Thus, the rear AGVs must completely stop until all of the front AGVs relinquish permission. We obtain the transfer flow using basic Newtonian mechanics, such as in equation (4).
AGV model verification
We verify the model obtained in section “AGV model behavior development around a merging point” with both simulations and experiments.
Verification with simulation
Simulation conditions
We conducted two types of simulations, which are shown in Figure 16. The layout is identical to section “Traffic jam analysis.” Conditions are also identical to those listed in Table 4. In the simulation, AGVs disappear in the lower section of the merging point. Thus, traffic jams downstream of the merging point do not occur and do not affect traffic around the merging point.

The layout of the experimental environment.
Simulation results
Simulations were conducted using the AutoMod™ simulation software. 17 Figure 17 plots the simulation results and theoretical values.

Theoretical value verification via simulations.
When simulating only two operating AGVs, the transfer flow follows equation (2) when
When simulating multiple AGVs for a period of 1 min, the transfer flow follows equation (2) when
Based on these results, we observe that the model developed in section “AGV model behavior development around a merging point” clearly explains the simulation results.
Verification with actual AGVs
Experimental conditions
Experiments were conducted at a test site at Murata Machinery, Ltd (see Figure 18) under the conditions listed in Table 5. Communication processing time is different compared with the simulations. We only conduct the two-operating AGV case due to constraints based on the number of AGVs at the test site.

Experimental environment layout.
Experimental conditions.

Experimental results
Experimental results are listed in Table 6 and experimental results and theoretical values are plotted together in Figure 19. Theoretical values are also plotted where
Experimental results.

AGV: automated guided vehicle.
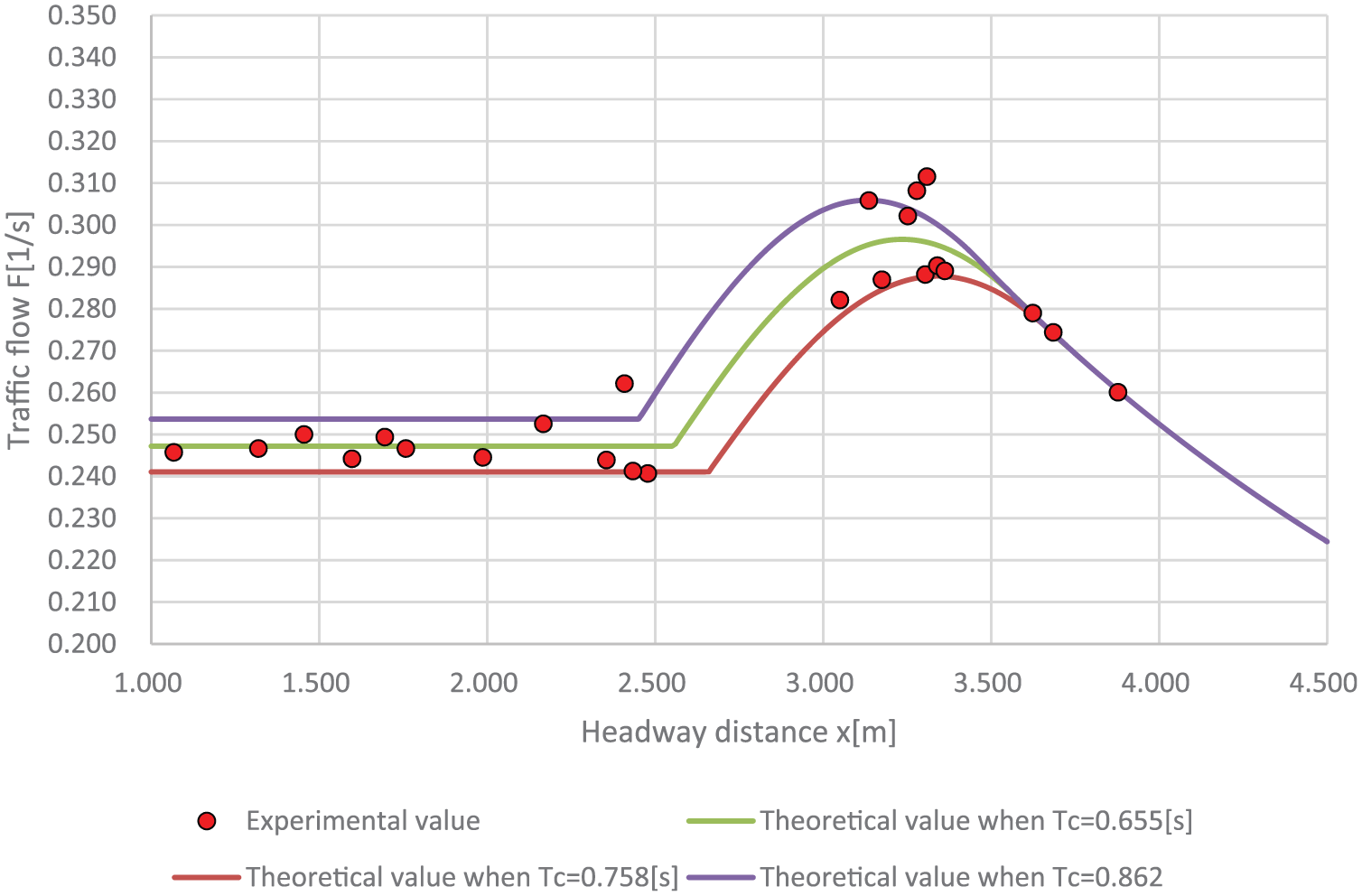
Experimental and theoretical values.
The verification of the two operating AGVs and multiple operating AGVs for 1-min simulations proves that the model developed in section “AGV model behavior development around a merging point” is feasible. Unfortunately, only the experiment with two operating AGVs was completed due to constraints on the number of AGVs at the test site. These verifications prove that the model developed in section “AGV model behavior development around a merging point” is applicable to real-world situations. We consider that the model developed in section “AGV model behavior development around a merging point” is sufficient for field engineering from both the simulation and experimental results.
Effects of the merging control based on the model
In this section, we evaluate the effects of the merging control based on the model developed in section “AGV model behavior development around a merging point.”
Simulation conditions
Simulations were completed with the test site simulation model at Murata Machinery, Ltd (see Figure 20) under the conditions listed in Table 7 using AutoMod. These simulation conditions are similar to real-world situations, but not identical due to restrictions on the publication of equipment specifications. If merging points are not bottlenecks, merging controls do not provide appropriate effects on traffic flow. Thus, we chose transfer patterns that form a bottleneck at the target merging point in these simulations (see green arrows and dotted square in Figure 20). We expected that traffic jams would occur at the target merging point shown in Figure 20. Furthermore, we changed the number of AGVs from 2 to 30 to gradually form a bottleneck in each simulation. Transfer flow and traffic flow were then evaluated. Transfer flow is the total number of front opening unified pods (FOUPs) transferred per hour. Traffic flow is the inverse of the AGV arrival time period at the blocking area exit. We compared two control models, which were a legacy blocking control model (no merging timing control model) and a merging timing control model based on section “AGV model behavior development around a merging point.”

Transfer simulation model with a small layout.
Conditions for transfer simulations.

Merging timing control
The merging timing is controlled at control points A, B, C, and D in this study (see Figure 21). This control policy aims to regulate the minimum headway distance in case 1 when traffic jams occur at the merging point. Case 2-2(I) provides maximum traffic flow for all the cases. Thus, this control policy aims to obtain the maximum traffic flow for Case 2-2(I) in this study. This policy does not consider traffic jams caused at areas other than the merging point. Control point B1 or B2 is set at the point that is
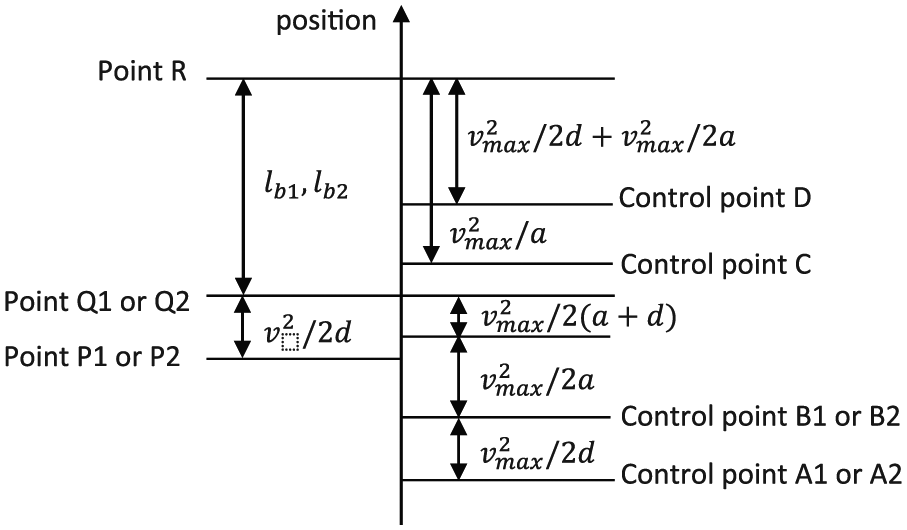
Control points set for the merging timing controller.
Conditions and decisions for the merging timing control.

AGV: automated guided vehicle.
Simulation results
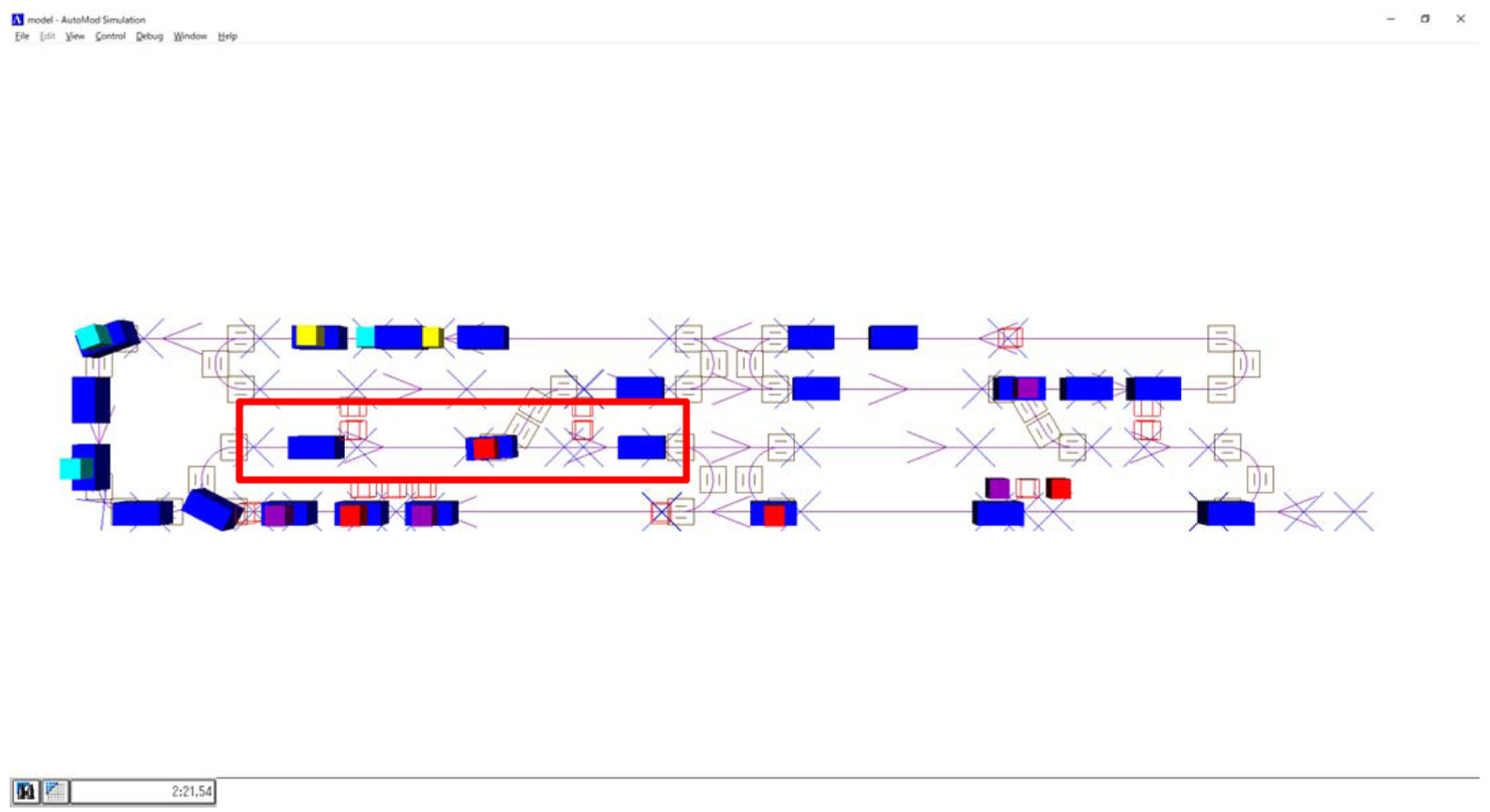
The headway distance at the target merging point is controlled such that it is equal to or more than 2.337 m with the merging timing controller in this simulation. This is the border in Case 2-2(I) and Case 2-2(II) in section “Traffic jam analysis.” Simulation results are plotted in Figure 22. Figure 22 shows the traffic flow at the merging point for each AGV. The traffic flow with the merging timing control is better than the flow without the control. This is an effect due to the merging timing control. The optimal number of AGVs was 24 for these simulation conditions. The maximum traffic flow, 1444.7 1/h, with the merging control nearly achieved the theoretical maximum traffic flow of 1487.0 1/h. Table 9 shows a five-number summary of headway distance without timing control, whereas Table 10 shows the same with timing control. The headway distance of AGVs should be ≥2.337 with timing control. We found that it is almost achieved from Table 10 when the timing controller is used. The timing controller cannot exclude bad effects of traffic jams downstream of the merging point as mentioned in section “Merging timing control.” When the number of AGVs is ≥20, small traffic jams downstream of the merging point occurred. Thus, there were a few data, the headway distance of which was less than 2.337 m. The minimum headway distances without control are smaller than those with the control, but the traffic flows are almost the same in both cases when the number of AGVs is less than 20. The number of AGVs is not large enough to form traffic jams or a bottleneck at the target merging point. Thus, these cases are not the target of this study. And these are not applicable to Case 2-1 in section “AGV model behavior development around a merging point” because only two AGVs approach the blocking area once in Case 2-1, whereas more than two AGVs approach the blocking area multiple times in the cases above in this simulation. When the AGV density is low, a delay because of short headway distance does not negatively affect AGVs running far upstream. Thus, the total number of AGVs passing through the blocking area in 1 h is the same for the cases with the control and without the control. Figure 23 shows a point in the simulation with the timing control and Figure 24 shows a point in the simulation without the timing control. The AGV headway distance (red rectangle) in Figure 23 is larger than that in Figure 24. If the number of AGVs is fewer than 24, the simulations do not achieve the maximum traffic flow because the AGV density is low. If there are more than 24 AGVs, the AGVs are unable to move due to a heavy traffic jam, known as “deadlock.”

The effects of the merging control based on the model.
Five-number summary of headway distance without timing control.

AGV: automated guided vehicle.
Five-number summary of headway distance with timing control.

AGV: automated guided vehicle.

Simulation with the merging timing control.
Simulation without the merging timing control.
This simulation forms a bottleneck at the target merging point. Thus, transfer flow is related to traffic flow, the relationship of which is shown in Figure 22. Transfer flow with a merging control is larger than that without a merging control, and traffic flows have the same trends as the transfer flows. This indicates that the merging timing control based on the developed model augments the traffic flow.
Conclusion
To achieve AGV and AMHS efficiency, there should be an optimal headway distance between AGVs. This study developed a mathematical model based on zipper merging for AGVs in an AMHS to achieve the optimal headway distance and maximum traffic flow. This model indicates that there is both an optimal headway distance and maximum traffic flow. We verified the model in part with fabrication using AutoMod simulations and, in another part, with actual AGV experiments. The results indicate that the mathematical model is feasible. Furthermore, we conducted a small full fabrication simulation, which indicated that a merging timing control, based on the model, augments AMHS transfer flow. We expect that macro-level 9 and micro-level optimization (this study) will improve manufacturing techniques in real factories.
Footnotes
Handling Editor: Wu Naiqi
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) received no financial support for the research, authorship, and/or publication of this article.