
Abstract
Operation and maintenance have their own impact in every field. Maintenance strategy is followed to provide unwavering quality and security for a healthy transportation system. Therefore, the transportation system requires an appropriate maintenance schedule of the vehicles. The classical analysis of the present and future performance of systems tries to assure that the safety and operational condition of the system so as to enhance the ability of credentials of proactive malfunction circumstances. Condition-based maintenance identifies the vehicle status based on wire or wireless monitored data and predicts malfunction to carry out suitable maintenance actions like repair and replacement before it happens. Different uncertainties like terrain, mileage of the vehicle and applied load on the vehicles have been utilized as the constraints of fuzzy-based vehicle maintenance scheduling. The response of vehicle maintenance scheduling (VMS) provides the details regarding the type of maintenance and time period in weeks for proposed maintenance plan. Probability values of constraints acquired by the hidden Markov model have been utilized as input of VMS. The response of vehicle maintenance scheduling has been compared with input obtained by Monte Carlo simulation. Reliability of the methodology corroborates the effectiveness of the proposed methodology in the field of maintenance scheduling for healthy transportation system.
Keywords
Introduction
Maintenance can be defined as the arrangement of technical and administrative acts intended to retain an item in or restore it to a state in which it can perform its required function. The technological development causes significant growth in liability of maintenance engineers due to the intricacy and size of the organization. Like other organizations, maintenance objective is to maximize the equipment availability along with minimization of the downtime in the event of breakdown and to increase the performance up to the acceptable level of accuracy. Proper maintenance strategy can help to arrange the spare parts and manpower for maintenance function to keep the minimum downtime of the equipment.
At the present time, technological expansion causes an enormous increase in the number of vehicles. Hence, the workload of a large transportation system has grown manifolds. Maintenance schedule plays an imperative role to give unwavering quality and security of a healthy transportation system. In a transportation system, maintenance of the vehicle is generally based on the opportunistic maintenance, which can have an adverse effect on the health of the vehicles and consequently the daily maintenance schedule.
Preventive maintenance (PM) involves activities necessary to ensure that working vehicles continue to operate properly. Simulation of maintenance plan for the fleet of the police vehicle has been prepared by SJ Joo et al., 1 which shows PM has greater efficiency of daily fleet operation than corrective maintenance. Computer-based system maintenance strategy has been developed for the components, one as per the performance of the component and another for scheduled maintenance with a dynamic fault tree in order to prevent system failure. 2 As per the change in role, responsibility along with the process and activity of an organization, the new predictive maintenance model has been designed for railway, which has been incorporated in the additional functionality of prognostic tool. 3 Reliability-centred optimal maintenance strategy of the equipment has been proposed in Long et al. 4 With the concept of the cost function, various maintenance strategies have been evaluated, and specific reliability has been obtained by an optimal maintenance strategy to maintain the operational performance during the lifetime with minimum maintenance cost and total lifetime cost (TLOC). 5
The speed control of an electromagnetic direct drive vehicle robot driver has been done with neural network to obtain driving vehicle with manual transmission and automatic transmission in various test conditions. 6 The performance improvements of pure electric vehicle have been presented by utilization of multi-speed dual-clutch transmissions and continuously variable transmissions. 7 Optimization of lane-change time to avoid collisions with other vehicles has been proposed, 8 for shortest time free lane change and emergency obstacle avoidance lane change.
Condition-based maintenance (CBM) is a maintenance strategy that gives better results to avoid catastrophic failure, 9 detects the impending failure and reduces failure rates system/ component. 4 This helps in expanding the utility of equipment without disturbing the daily routine adopted by a transportation system. Some systems are based on deterministic constraints, but in some cases, those constraints are non-precise. In this case, soft computing technique executes processing which resembles the human-like decision. Accordingly, the prioritize maintenance activity of the vehicle proactively scheduled using the fuzzy model in order to increase the ability to identify the problem before it actually occurs. 10 Scheduling not only gives the idea for the maintenance of the vehicle but also it is a detailed process of arranging the spare parts in advance and availability of labour in the prescribed time details as given by H Ali and Y Shafahi. 11 However, bay line must be equipped with availability. It is an important criterion in terms of performance of the system accountable for reliability, maintainability and safety for enhancing the life of the vehicle. With less number of vehicles, it is maintained by manual records, but the increase in the number of vehicles also increases intricacy. 12 A transportation system with large number of vehicles needs suitable scheduling, which helps to enhance the working conditions and life of the vehicle along with service reliability.
CBM, which comprises system maintenance plans for prognostic safeguarding purposes, accreditation and the results are well illustrated in plant programme documents. 13 Numerous maintenance tasks, high work accumulation and equipment failures are some factors which adversely affect the reliability of a transportation system. Nowadays, due to the enhancement of technological development, application of geographic information system (GIS) is very common in every field; one of the important applications of the GIS is in the fleet management system. 14 GIS, an essential component of autonomous vehicle system, has its own benefit of ensuring the safety and reliability of the vehicle by avoiding hazardous situations; MM Aldurgam and M Elshafei 14 have discussed its need in general terms of real-time response.
Different uncertainties like terrain, mileage and applied load have been utilized as inputs of fuzzy model for prioritize maintenance activity as in Kamlu et al. 10 The underlying information obtained from GIS has been used to produce monthly reports by Monte Carlo simulation (MCS). A highest probability value of the three constraints generated by MCS has been utilized as input of the fuzzy model. This work has been extended to CBM scheduling. The main objective of the proposed methodology is to design cost-effective, reliable, decision support maintenance strategy for the transportation system dealing with large number of vehicles. Different uncertainties associated with the vehicle which affect the performance of the vehicle has been considered as input of the vehicle maintenance scheduling (VMS) model. To enhance the reliability, working life and safety of the vehicle, design of CBM strategy helps the operator to organize and prioritize the maintenance activity of the vehicle in order to increase the ability to identify the problem before it actually occurs. The decision-making process of CBM based on sequence of information and hidden Markov model (HMM) is suitable for application dealing with recognizing condition based on a sequence of the feature. Information obtained from GIS-based vehicle tracking system has been utilized for the proposed methodology. The speed of the vehicle is collectively effect of load, terrain and mileage of the vehicle. While designing the CBM strategy, past and present real-time data related to the speed over the distance travelled have been utilized as distinct observation of hidden state of the HMM.
The probability values of nonlinear uncertainties have been obtained using the proposed methodology. These uncertainties have been utilized as input of VMS designed by the fuzzy logic system. HMM has been designed for each constraint utilized for VMS as HMM-Terrain, HMM-Mileage and HMM-Applied load. Input obtained by HMM and MCS has been given to the fuzzy model, and the performance of these two maintenance strategies has been compared.
The organization of the article is as follows. In section ‘Constraints of scheduling’ details of constraints utilized for the maintenance scheduling have been presented. The section ‘Overview of HMM for VMS’ comprises an overview of HMM as implemented in various applications. Case study with results has been discussed in the section ‘Case study with results’. The last section comprises the conclusion of the proposed work.
Constraints of scheduling
In this section, different constraints have been briefly discussed, which have been considered while designing the maintenance scheduling of vehicles for a transportation system. The constraint of scheduling has been already discussed by Kamlu et al., 10 which affects the working conditions and maintenance of vehicle. They are as follows (1) Terrain (2) Mileage of the vehicle and (3) Applied load. Similarly, in this proposed work, design of maintenance scheduling has been done with the constraints shown in Figure 1. As per the percentage gradient, the terrain is classified as flat (0%–20% gradient), semi-steep (21%–30% gradient) and rough (30% and above); and mileage is classified into low, average and high. In this work, medium type of load-carrying vehicle like buses and trucks of the transportation system has been considered for the designing the model for maintenance scheduling. According to load-carrying capacity, medium type of load is classified as Class IV (6351–7257 kg), Class V (7258–8845 kg) and Class VI (8846–11,793 kg). Application of vehicle tracking system is universally accepted. From the GIS-based vehicle tracking system, status of the real-time terrain and knowledge of mileage have been considered as the constraints of fuzzy model. For bus, applied load has been calculated by number of tickets sold out multiplied by average weight of the person as 65 kg, resultant gets added to the weight of the vehicle without load.

Constraints of scheduling.
Kamlu et al. 10 have presented fuzzy-based maintenance scheduling of the vehicles, where inputs of the fuzzy model are obtained by the real-time data and have been utilized to predict the condition of vehicles with the help of MCS. The output of the MCS is the predicted values of the predefined membership function, which is the input of the fuzzy model. In this extended work, CBM has been designed from the current real-time data and next maintenance plan has been acquired by fuzzy-based VMS. The highest probability values of constraints obtained by HMM have been utilized as input of VMS. Input obtained by HMM and MCS has been given to the fuzzy model which provides the information in terms of the type of maintenance and gap between the successive maintenance. The performance of these two maintenance strategies has been compared with the help of concept of fuzzy reliability.
Thus, from a vital state of PM, appropriate activities are taken to return the system to an operational state, that is, nominal or degraded one with a threshold of predetermined performance. This can be analysed by stochastic approaches like Markov-chain, 15 MCS, functional approach and universal moment generating function. 16
Overview of HMM for VMS
HMM is one of the statistical tools for representing generative successions that can be described by a basic procedure of generating an observable sequence. It is suitable for analysing some non-stationary, unpredictable and weak reproducible signal. HMM has been introduced in the application of phone signal identification in 17 the 1980s and has great success in various fields and application. The consistent value of variable given in HMM provides simplified and consistent the model 18 where discrete hidden Markov model (DHMM) algorithm has been utilized for fault diagnosis for power transformer. Among many fields, application of HMM has been widely accepted in applications like fault diagnosis 18 and speech recognition. 19 The details of HMM are also well discussed by Lee et al. 20 and Jurafsky and Martin. 21
In this section, an overview of HMM has been presented. HMM has been designed for each constraint utilized for VMS as HMM-Terrain, HMM-Mileage and HMM-Applied load. Let N be labelled as the Markov chain sequence state in the model. The N states can be defined as, in HMM-Terrain: flat terrain, semi-steep terrain and rough terrain are the state of the Markov model. In HMM-Mileage: low mileage, average mileage and high are the state of the Markov model. Similarly, design of HMM-applied load has been done with Class IV, Class V and Class VI as the state of the Markov model. The Markov chain states can be defined as at time t, for same probability distribution in all n, first-order Markov chain of observation and the joint-probability of a sequence of N observations is given by

Let the number of distinct observations per
As the speed of the vehicle is an important factor which commonly affects the constraints of scheduling. Speed of the vehicle: slow speed (s), economical speed (e) and fast speed (f) are the distinct observation of hidden state of the Markov model for all constraints. The initial probability matrix is defined by π

A HMM is defined as the triplet

A is the state transition probability matrix and B is the observation probability matrix. It represents the probability of being in the state Si at time t = 1

The probability of the observations of the model given by

The result allows to evaluate the probability of O. A better approach is to recognize the numerous redundant computations, done directly from the above equation, which reduces the complexity.
Forward algorithm
Joint probability of observation in state is a partial observation at time t in the state

In the process of forward algorithm

Observation at jth hidden state

Backward algorithm
The procedure of backward algorithm is the exact reverse of forward algorithm, is given below


The problem of decoding is to discover the hidden state sequence and produce a probable observation sequence. The best single state sequence of an observation sequence can be solved by the Viterbi algorithm. The Viterbi algorithm, which is akin to the forward algorithm, in its place of the sum, the transition probabilities are maximized at every step.
Viterbi algorithm
For the given observation sequence is given by

Flowchart for selection of maximum probability of state sequence using Viterbi algorithm.
Case study with results
In this work, a case study of transportation system has been considered with six buses. Table 1 and bar graph presented in Figure 3 indicate the details of past maintenance activities of the buses in terms of kilometres in 2011 and 2012. It is clear that usually a transportation system does not perform similar maintenance activities for all its vehicles. These are the major errors which may adversely affect the life and working conditions of the vehicles, which, in turn, disturb the daily routine and decrease the reliability of the entire transportation system.
Details of case study.

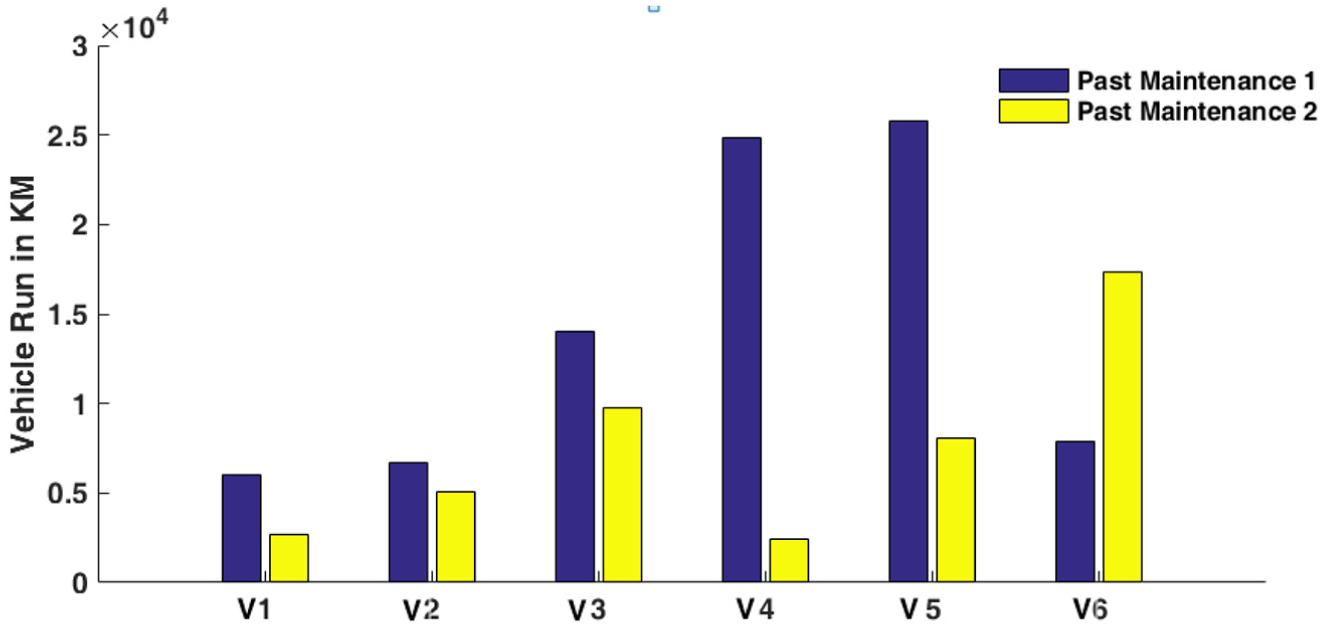
Graph showing past maintenance of vehicles after distance travelled in km.
The real-time data obtained from GIS-based vehicle tracking system related to the speed over the distance travelled have been used as distinct observation of hidden state of the Markov model. While designing the CBM strategy, the three constraints have been utilized for scheduling purpose, that is, terrain, mileage of the vehicle and load carried by the vehicle.
On the basis of fuzzy model, CBM plan for the vehicle has been rescheduled, which provides the consequences acquired by fuzzy, in terms of the type of maintenance and interval working time period of vehicle in weeks as obtained by calculating the probabilities using HMM.
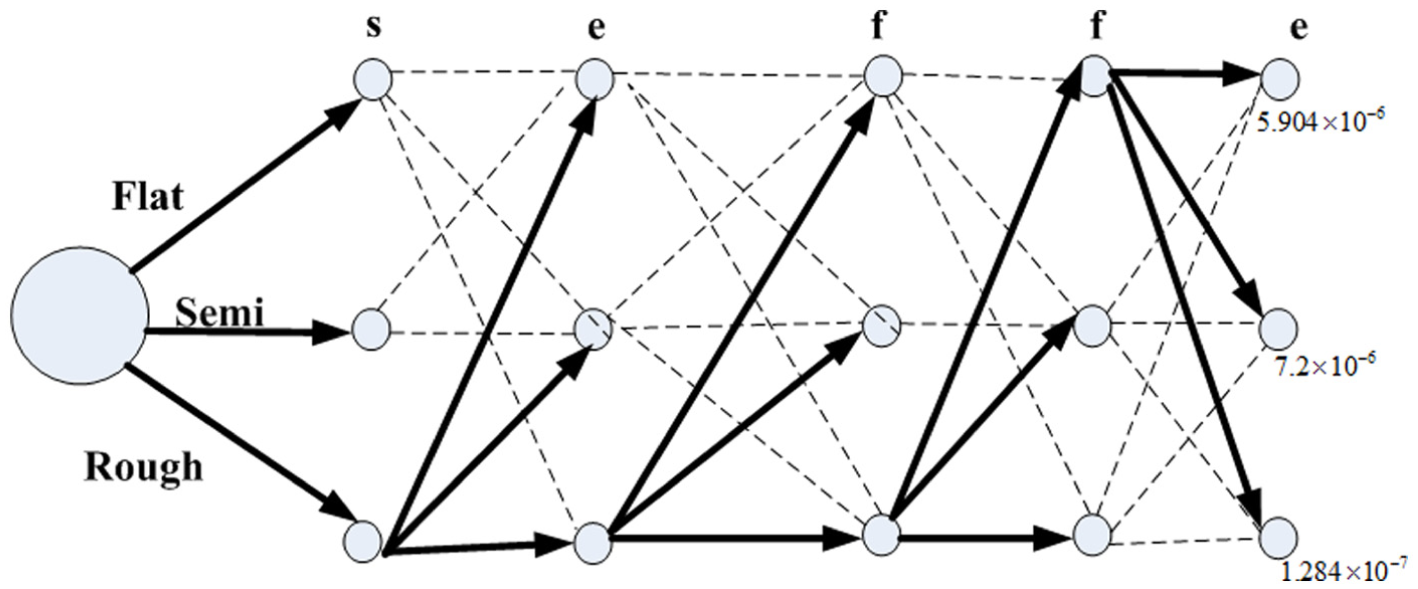
The implementation of the three-state HMM has been presented in Figure 4(a) and (b), indicating three components of the system S1, S2 and S3 (in case of terrain, these are flat, semi-steep and rough) and three hidden states Hs1, Hs2 and Hs3 (speed of the vehicle: slow speed (s), economical speed (e) and fast speed (f)) in Figure 4(b). Each hidden state has three observations, one is healthy state and others are degraded states of the system. The predicted hidden state probabilistically depends on the observation or visible states of the system.

(a) Three-state HMM and (b) model for three-state HMM.
As stated before the HMM can be expressed in terms of mathematics equation is given by
HMM model for Terrain.
The state transition probability matrix A and j is the state probability followed by the state i. Note that the state transition probabilities are independent of time

Transition probability matrix

The observation probability matrix of reaching at state j, which represents the probability of visible state bik, the probabilities of the emmition that machine omit visible state.

For three states and visible state
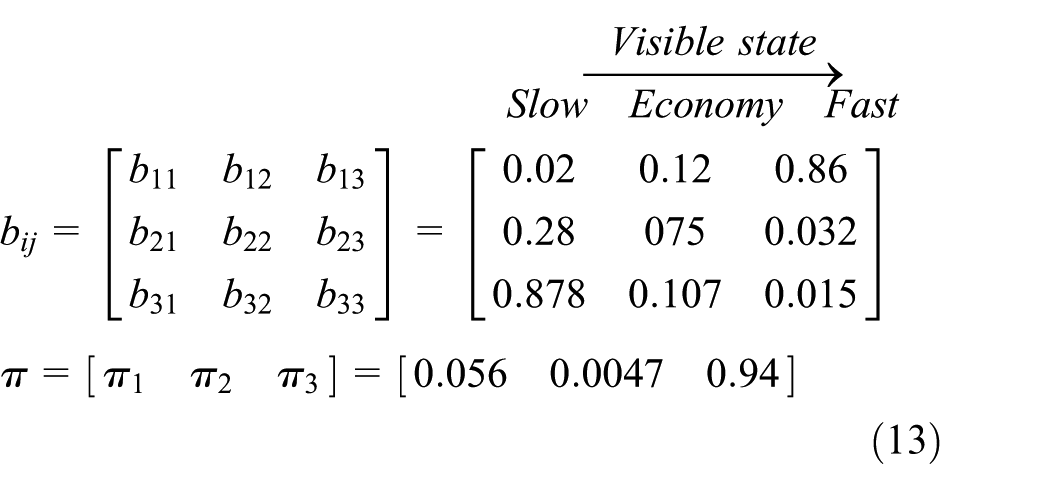
These are the initial values of the flat, semi-steep and rough terrain, respectively. In a particular state,



r indicates one of the possible sequence and r max is number of possible sequence that can generates.
Expected number of transitions

Total expected number of transitions from state
In this process, the probability of flat, semi-steep and rough terrain has been evaluated, that is, [5.904 × 10−6, 7.2 × 10−6, 1.284 × 10−7]. The vehicle v3 followed the sequence s-e-f-f-e and the obtained highest probability value of the terrain as semi-steep with most probable path Hs3-Hs3-Hs3-Hs1-Hs1 7.2 × 10−6 acquired from the Markov chain. Similarly, the probabilities of the different observations of vehicles v1, v2, v3, v4, v5 and v6 are obtained from Tables 2–7 using HMM and presented in Table 8.
Probability of different observations for vehicle v1.

Probability of different observations for vehicle v2.

Probability of different observations for vehicle v3.

Probability of different observations for vehicle v4.

Probability of different observations for vehicle v5.

Probability of different observations for vehicle.

Probabilities of different vehicles for most probable path.
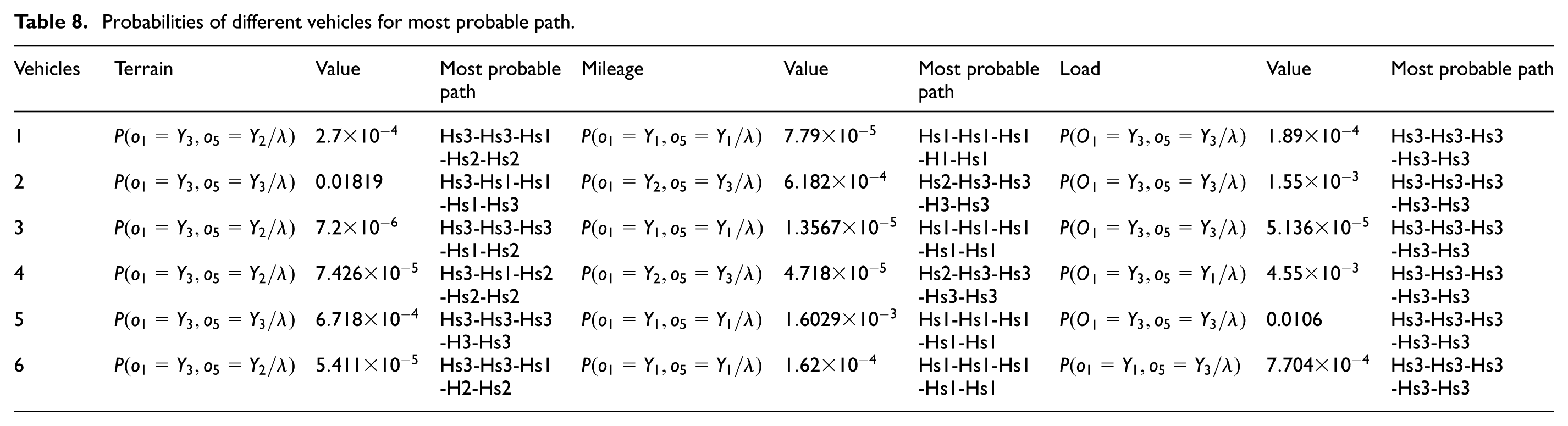
The probabilities obtained from HMM using Table 8 have been used for deciding the inputs of the fuzzy model. These inputs are combined with ‘IF–THEN’ rules. For example

IF the Terrain is ‘flat’ and mileage is ‘high’ and applied load is ‘Class VI’, THEN vehicle maintenance is to be done after 6500 km, that is, S2-type maintenance.
Defuzzification process has been done with the method of centroid. The result obtained by the HMM has been an input function of the fuzzy model which is collected together in Table 8.
The results obtained from HMM are then compared with the results of MCS and Inspection, maintenance as mentioned by Kamlu et al. 10 Response of various maintenance strategies has been presented for 5-year-old vehicle v1 shows an inspection maintenance type IT4, fuzzy model with MCS gives S4-type maintenance recommended after eight working weeks whereas fuzzy model with HMM shows S3 type of maintenance after nine working weeks. The present state of the vehicle has been considered as hidden state while designing the HMM model, which gives results for CBM. Likewise, all six vehicle maintenance details have been presented in Table 9.
Comparison of results obtained using HMM and MCS.

HMM: hidden Markov model.
Performance evaluation of these two maintenance strategies has been done from status of vehicles in terms of age in years, the gap between the consecutive maintenance and knowledge of the type of maintenance as shown in Table 9. Concept of fuzzy reliability has been presented in Mohanta et al.;
22
similarly, the fuzzy reliability model has been developed to evaluate the mean time to failure (MTTF) and mean time to repair (MTTR) of the system. Mean failure rate (λ) has been calculated by
Calculation of MTTR and MTTF for HMM and MCS.

MTTR: mean time to repair; MTTF: mean time to failure; HMM: hidden Markov model.
From Figure 6(a), test results show maintenance strategy designed with the input of fuzzy model obtained by HMM has high MTTF values as compared to the MCS. Figure 6(b) indicates less value of MTTR for maintenance strategy designed by HMM, which indicates that the proposed methodology is not only efficient with higher value of failure rate but also has less repair rate.

Performance analysis of maintenance strategy: (a) MTTF and (b) MTTR.
Failure due to completely random or chance events will follow the exponential distribution function

Reliability function


The probability of availability and probability of unavailability are given by

where probability of availability
Probability of reliability and probability of unreliability.

HMM: hidden Markov model.

Probability of reliability.
Conclusion
The maintenance strategy plays a vital role in monitoring the health of any transportation system. In this work, a CBM strategy has been proposed considering different uncertainties like load, mileage and terrain of individual vehicle to develop the fuzzy model. For the design of HMM, the speed of the vehicle is utilized as the hidden state of the HMM model. The output of HMM is the probability value of the constraint which is being utilized as the input of the fuzzy model.
Input obtained by MCS and HMM given to the fuzzy-based VMS, and output of fuzzy-based VMS has been compared. Performance of MCS and HMM has been evaluated in terms of reliability and probability of unreliability of the system. After comparing, it is found that for CBM, HMMs have been confirmed enough potential to develop pragmatic, robust algorithms. The superiority of HMM is that, it is fully probabilistic model and can be directly integrate quasi-stationary distribution which is the significant anxiety of CBM. HMMs can consolidate all available prior knowledge in a Bayesian formulation and, because of their Markovian structure, provide the rise to computationally proficient signal processing algorithms. The Viterbi algorithm is extensive, both in terms of memory and computing time.
Footnotes
Acknowledgements
The authors thank the Birla Institute of Technology, Mesra, India, for providing the transportation system data for the development of proposed methodology.
Handling Editor: Jia-Jang Wu
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship and/or publication of this article.
Funding
The author(s) received no financial support for the research, authorship and/or publication of this article.