
Abstract
Currently, there is a widespread concern over cooperative driving based on vehicle-to-vehicle communication due to its considerable potential to improve the increased traffic safety, efficiency, costs, and intellectualization. In this article, a multi-objective coordinated adaptive cruise control algorithm for a string of adaptive cruise control–equipped vehicles is thus proposed, which can comprehensively address issues regarding homogeneous/heterogeneous features, road capacity, in addition to driver desired response. The practical platoon stability of adaptive cruise control–equipped vehicles employing constant time headway spacing policy is investigated by taking into account the parasitic time delays of wireless communication modules and time lags of automotive actuators. The simulations show that the control algorithm utilizing model predictive control framework reaps significant benefits in terms of driver desired response, platoon stability as well as road capacity, while at the same time providing a reasonable proposal on the design of adaptive cruise control controller with better adaptability from the perspective of practical platoon stability.
Keywords
Introduction
As a typical application of advanced driver assistance system (ADAS), the adaptive cruise control (ACC) system commercialized by most automakers is mainly aimed at reducing driver workload so as to enhance driver convenience, yet having considerable potential to help to improve vehicle safety and traffic jams.1,2 The mass-produced ACC system maintains a desired following spacing, ordinarily employing the constant time headway (CTH) spacing policy, 3 by regulating the acceleration pedal position as well as brake pressure of host vehicle.
Interestingly enough, vehicles with ACC widely equipped will be likely to construct a platoon that is a string of vehicles moving longitudinally in an automated manner, which will have a noteworthy impact on traffic characteristics such as efficiency, capacity, and safety because ACC-equipped vehicles have much higher consistency compared with the human-piloted ones.4–6
Accordingly, the term “platoon stability” or “string stability” has been commonly referred to in recent literatures when it comes to the stability of autonomous vehicle-platooning systems. This property ensures that any perturbation in spacing errors as well as velocity errors will not lead to amplified fluctuations through the following vehicles.2,7 Providing that the upstream propagation of the perturbation mentioned is not well controlled, not only does ride comfort decrease but could also result in rear-end collisions. Concerning the quantification of platoon stability, a general approach proposed by Swaroop and Hedrick 8 is to derive the transfer function of spacing error of the preceding vehicle to that of the following vehicle, and the platoon stability is said to be guaranteed only if the magnitude of the transfer function is not more than 1 for all frequencies. 8 Rajamani and Zhu 7 stated that if CTH spacing policy was employed as the desired following spacing, the platoon system could be designed to be platoon stable as long as the constant time gap was chosen twice more than time lags mainly associated with actuators and radar filters, and additionally pointed out that, it was impossible to guarantee platoon stability if a constant spacing policy was adopted. Furthermore, Xiao and Gao 9 held the view that the practical ACC system involved parasitic time delays besides time lags, all of which should be taken into account. Meanwhile, the proposed controller based on sliding mode control (SMC) along with CTH spacing policy showed that the negative effect of the time delays was larger than that of the time lags. 9 More recently, considering the heterogeneous time-varying delays due to wireless communication among vehicles, a distributed control strategy10–12 is proposed to achieve finite time stability based on Lyapunov–Razumikhin theorem.
A review of current literature shows that the mentioned platoon system that considers multiple objectives has not yet been developed. Moreover, most of the controllers designed for platoon system are relied on classic control theory, namely proportional–derivative with a feedforward/feedback network. As model predictive control (MPC) has recently been proved its merits in ACC controller for an individual vehicle,13,14 which can simultaneously coordinate multiple objectives such as tracking capability, fuel economy, ride comfort, as well as vehicular physical limitations, it will be worthwhile to attempt to introduce MPC framework for the platoon system so as to improve road capacity, traffic throughput in addition to driver desired response. By the way, compared with Xiao and Gao’s 9 work, the originality is the introduction of a novel application of vehicle-to-vehicle (V2V) communication, 15 thus making the traffic system more intelligent, in terms of safety, real-time, reliability, as well as environment friendly.
The organization of this article is described as follows. Section “Analysis of platoon stability” presents the analysis of homogeneous and heterogeneous platoon stability with the consideration of parasitic time delays and time lags. Section “MCACC control algorithm considering platoon stability” proposes multi-objective coordinated adaptive cruise control (MCACC) algorithm based on MPC framework. Simulations and analysis are discussed in section “Simulations and analysis.” In final, conclusions are drawn in section “Conclusion.”
Analysis of platoon stability
In the practical traffic system, the homogeneous platoon that is composed of uniform vehicles equipped with the identical ACC controller is not realistic. Thus, it is necessary to analyze the stability of the heterogeneous platoon which is of great importance for the design and implementation of more universal ACC controller. In this article, the term “homogeneous platoon” indicates that the ACC-equipped vehicles are completely consistent, which is still considered as a good way to establish and simplify the platoon model, while the term “heterogeneous platoon” indicates that the ACC-equipped vehicles are produced by different automakers as well as component suppliers who may not reach a unified standard in the controller design (i.e. the choice of time gap for CTH spacing policy, the initialization of system parameters, inputs/outputs [I/O] constraints).
What is more, supposing that the ACC-equipped vehicles in the platoon are all equipped with a V2V communication module, 15 which helps to share real-time and reliable information such as speed, location, and braking among vehicles within a certain range. As illustrated in Figure 1, the ACC-equipped vehicles can be regarded as an interconnected system, with a leading vehicle labeled 0.

Sketch of ACC-equipped platoon.
Analysis of homogeneous platoon stability
As mentioned earlier, platoon stability implies that the propagation of spacing errors is not allowed to be amplified through the following vehicles8,9 and can be described in the form of transfer function as follows

where
The control purpose is to asymptotically converge

where
That is to say, the reaching law of the controller can be specified as

where
Regarding the inter-vehicle desired spacing, the CTH spacing policy 3 is employed, which changes linearly with the velocity of the following vehicle

where
By integrating equations (3) and (4), the detail derivations are listed as follows

Apparently, if the control law is defined as

Equation (3) holds, where

where
Moreover, the longitudinal dynamics of vehicle is of strong nonlinearity, mainly due to the nonlinearity of engine torque maps, time-varying gear position, as well as aerodynamic drag force. 16 Thus, in order to linearize the longitudinal dynamics of vehicle, we introduce a first-order inertial system, 7 that is

where
By integrating equations (6) and (7), and taking the Laplace transformation on both sides, the velocity transfer function is built as

It is found in equation (8) that

which indicates that for the homogeneous platoon, the trend of propagation of spacing errors keeps in accordance with that of velocities.
According to the requirement of platoon stability defined as equation (1),

Due to the design parameter

which further indicates that there is a lower boundary in the choice of time gap for CTH spacing policy, and platoon stability is able to be guaranteed as long as the condition shown as equation (11) holds.
Analysis of heterogeneous platoon stability
As mentioned above, the homogeneous platoon is an ideal model, and thus, heterogeneous platoon should be taken into account so as to search for the corresponding conditions of heterogeneous platoon stability.
Then, equation (9) is no longer suitable for the heterogeneous platoon. It is rewritten as

where

By employing Euler formula

As the spacing errors have most of their energy at the region of low frequencies,
9
it means that

Clearly,

According to the analysis in section “Analysis of homogeneous platoon stability,”

Then, we obtain

if both equations (16) and (17) hold.
Finally, the platoon stability of heterogeneous ACC-equipped vehicles employing CTH spacing policy can be guaranteed, if

In summary, when the homogeneous platoon keeps stable, we can find out that the propagation of spacing errors through the following vehicles shows an obvious trend of attenuation. While for heterogeneous platoon, it will be more challenging, and both tracking capability in velocity and maintaining capability in inter-vehicle spacing should be well-guaranteed simultaneously.
MCACC control algorithm considering platoon stability
Longitudinal inter-vehicle model for MCACC
For the sake of simplicity, the ith (i ≥ 1) vehicle in Figure 1 is regarded as following vehicle, while the (i – 1)th vehicle denotes preceding vehicle. In addition, preceding vehicle becomes the leading vehicle when i equals 1, without loss of the generality. The sketch of longitudinal car-following is then illustrated in Figure 2.
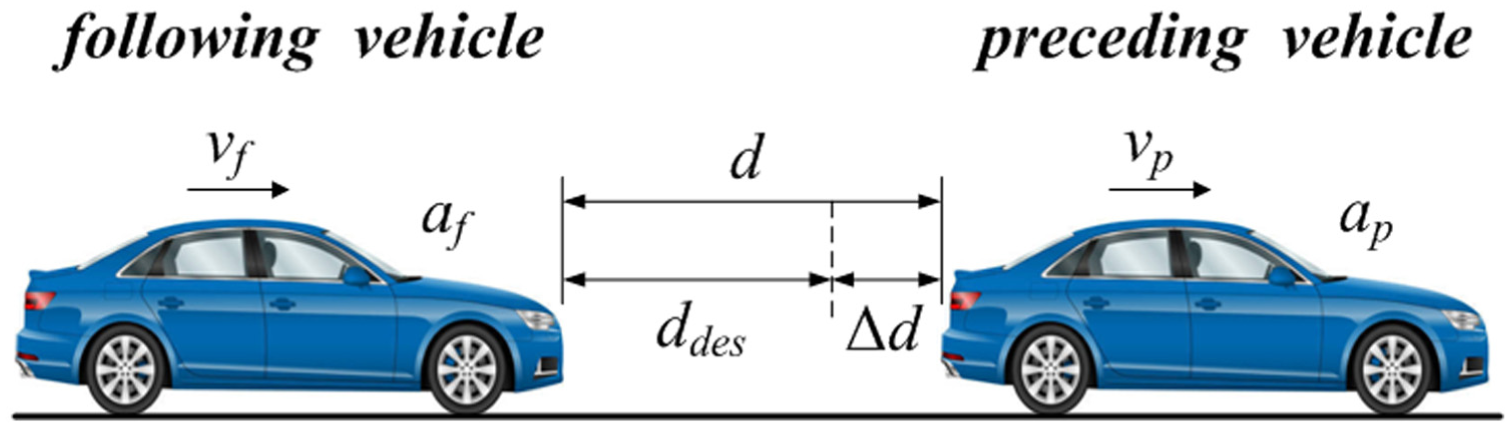
Sketch of longitudinal car-following.
Two state variables are defined: spacing error

where d denotes inter-vehicle actual spacing,
Regarding

where
Moreover, a first-order inertial system 14 is introduced so as to linearize the longitudinal dynamics of vehicle

where
Integrating equations (20)–(22), discrete-time expressions can be established as equation (23) using difference approximation

where
Let

where

In consideration of the presence of predictive errors as well as modeling inaccuracies, an error feedback vector is defined as

where
Then equation (24) is rewritten as

where
It is well known that the MPC has a promising application prospect among industrial controls, due to the three advanced features, namely model prediction, receding-horizon optimization as well as feedback correction mechanism.13,14
Accordingly, the p-step predicted state-space equations is built as

where p (p ≥ 1) denotes the predicted horizon,

Driver desired response
Tracking-capability
The spacing errors and velocity errors should be converged to a driver permissible range so as to reduce frequent cut-in from adjacent lanes. 14 Accordingly, employing a two-norm of spacing errors and velocity errors, the sub-cost-function representing tracking-capability is suggested as

where
Fuel-economy and ride-comfort
The way to restrict absolute of longitudinal acceleration as well as its derivative (jerk) to a certain extent can not only reduce fuel consumption but also help to improve longitudinal ride comfort. 17 Accordingly, employing a two-norm of longitudinal acceleration and jerk, the sub-cost-function representing fuel-economy and ride-comfort is suggested as

where
Driver-behavior-characteristics
The reference acceleration is commonly described by a linear driver car-following (DCF) model, 18 that is

where

where
By the way, either too strong or too weak for the pursuit of tracking capability will be unfavorable. The perfect tracking performance is at the expense of fuel economy and ride comfort, while the poor tracking performance might lead to frequent cut-in, driver intervention, or even rear-end collisions. In order to achieve driver desired response, it would be appreciated to make a trade-off among the mentioned sub-objectives by employing advanced control methods such as MPC.
System constraints
I/O constraints
Considering the existence of vehicular physical limitations, and requirements for ride comfort/fuel economy/driver permissible tracking range, then the lower and upper boundaries of control commands together with state variables are constrained as

where
Rear-end safety
During the car-following, rear-end collisions must be considered as a hard constraint, mathematically described as

where d denotes actual inter-vehicle spacing,
And the p-step predicted inequality is represented as

where
Platoon stability
As previously mentioned in section “Analysis of platoon stability,” there is a lower boundary in the choice of time gap for CTH spacing policy to guarantee platoon stability for both homogeneous and heterogeneous platoons. Accordingly, for the predictive controller, the lower boundary in the choice of time gap is suggested as

where
Furthermore, the typical commercial ACC controllers designed with a time gap between 1 and 2 s, which translates into an inter-vehicle spacing of 30–60 m or so at highway speeds. 7 Note that the larger time gap designed will not only lead to a decline in road capacity, having a detrimental effect on traffic flow, but could also result in cut-in by manually operated vehicles. On the other hand, the platoon might not be able to maintain stable or even rear-end collisions could occur if time gap is designed to be too small.
Receding-horizon optimization for MCACC
Addressing computing infeasibility
During the receding-horizon optimization process, computing infeasibility is a significant issue for MPC with I/O constraints. For instance, when the preceding vehicle accelerates/decelerates rapidly, the following vehicle normally cannot make a response to it in time, in which situation the tracking errors will exceed the boundaries of the hard constraints, and the optimization will accordingly be terminated because of the unsatisfied constraints. Therefore, a constraint softening method is naturally introduced so as to avoid such issue. 19
As illustrated in Figure 3,
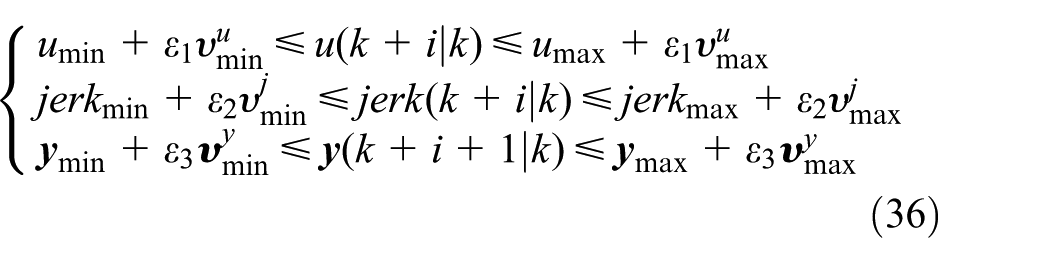
where
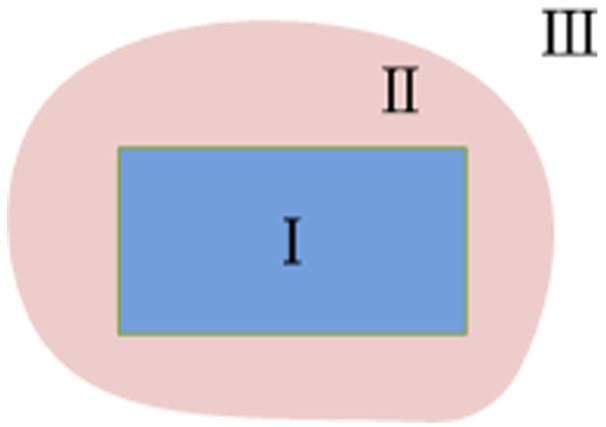
Sketch of system IO constraints.
Predictive control algorithm
In order to avoid the ineffectiveness of I/O constraints, it is necessary to define a penalized term (two-norm of slack variables), by which some balance can be well achieved between computing feasibility and violation of the hard constraints. Then the cost function in p-step predicted horizon is suggested as

where
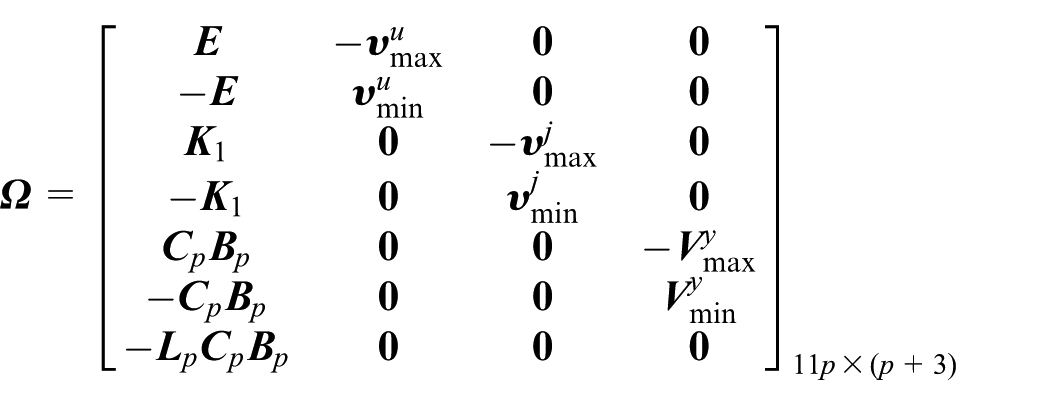
The optimization problem is to minimize the cost function equation (37) subject to I/O constraints (33), (35) and (36), which can be finally transformed into online quadratic programming (QP) problem, shown as

where















During the receding-horizon optimization process, when the boundaries of
In addition, the optimal control sequence, shown as equation (39), is obtained after each online optimization is completed

The current control input will be replaced by the first value in equation (39), and then the horizon moves forward a step. The so-called receding-horizon optimization repeats this process step by step, realizing the receding-horizon predictive control accordingly.
Simulations and analysis
The proposed multi-objective control method applied to a platoon was validated and evaluated by performing several numerical comparative simulations in MATLAB/Simulink and CarSim. The main parameters of MCACC controller are shown in Table 1.
Parameters of MCACC controller.

Platoon response during the steady scenarios
It is assumed that the platoon applied is composed of 10 identical ACC-equipped vehicles, labeled from 1 to 10. And the initial velocity of leading vehicle labeled 0 is 20 m/s. At 10 s, the leading vehicle begins to accelerate at 0.3 m/s2 from 20 to 23 m/s, decelerates at −0.3 m/s2 from 23 to 17 m/s, accelerates at 0.3 m/s2 from 17 to 20 m/s, and then continues the process regularly until 210 s, maintaining a steady velocity of 20 m/s again.
The platoon response is shown in Figure 4. As seen from Figure 4(b), the spacing errors through the following vehicles decrease smoothly, which indicates that there will be no rear-end collisions between the (i + 1)th and the ith vehicle for every i ≥ 1, if the first vehicle does not crash into the back of the leading one. It also indicates that the whole platoon maintains stable by setting time gap to 1.5 s. Figure 4(a) and (c) demonstrates the real-time tracking in the actual spacing and velocity, respectively. From Figure 4(a), the average inter-vehicle spacing is 35 m and accordingly, the length of the platoon in average reaches 350 m. Moreover, at about 250 s, the 10th vehicle enters into the steady state, maintaining the velocity of 20 m/s. It implies that the delay of the platoon response time is 40 s or so (calculated by 250–210 s).

Platoon response with time gap
To be important, supposing that the following vehicles all could make a response in time, there will be almost no response delay. That is to say, the tracking in velocity together with the maintaining in inter-vehicle spacing is a little sacrificed, thus yielding a 40 s delay. On the other hand, it is therefore possible to achieve better ride comfort, as shown in Figure 4(d), precisely due to such sacrifice.
Figure 5 demonstrates the propagation of spacing errors through the following vehicles with different time gap
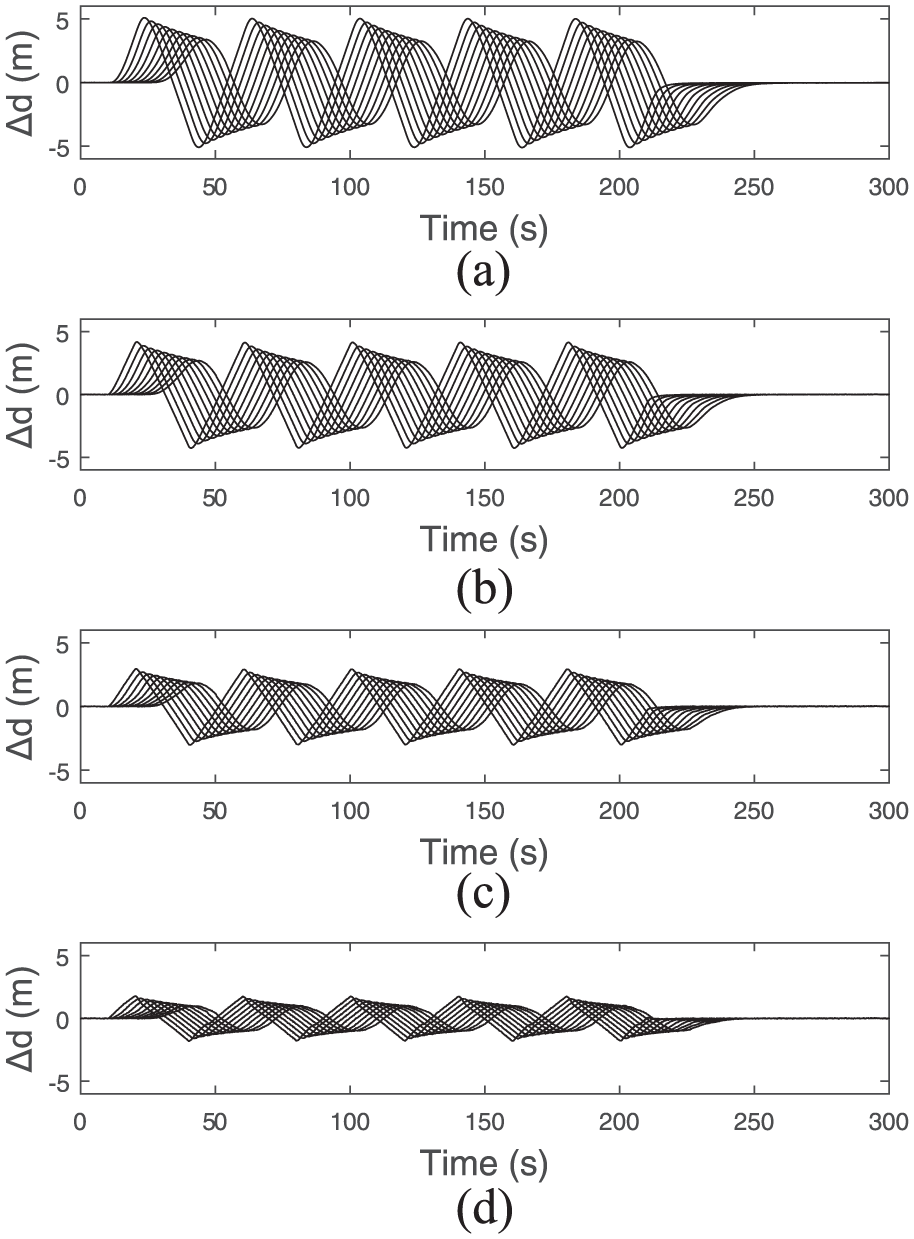
Platoon response to different time gap
As shown in Figure 5, the platoon maintains stable when time gap

Platoon response to weight coefficient
Supposing time gap

Platoon response to weight coefficient
Platoon response during the transient scenarios
During a hard braking scenario, it is assumed that the initial velocity of leading vehicle labeled 0 is 20 m/s. At 10 s, the leading vehicle begins to decelerate at −2.0 m/s2 from 20 to 10 m/s.
As shown in Figure 8, the platoon stability will not be guaranteed when time gap decreases to a certain value, indirectly verifying the condition of platoon stability discussed in section “Analysis of platoon stability.” Compared with steady scenarios (see Figure 5(a)), the platoon stability during the hard braking scenario will be extremely worsened when time gap

Platoon response to a hard braking scenario: (a) time gap τh = 2.0 s, (b) time gap τh = 1.5 s, (c) time gap τh = 1.0 s, (d) time gap τh = 0.5 s, (e) time gap τh = 2.0 s, (f) time gap τh = 1.5 s, (g) time gap τh = 1.0 s, and (h) time gap τh = 0.5 s.
By the way, during the simulations, it is further found that weight coefficient
Conclusion
The introduction of MPC framework applied to a platoon of ACC-equipped vehicles helps to coordinate multiple objectives such as driver desired response or permissible range, platoon stability, vehicular physical limitations, rear-end collision avoidance as well as road capacity simultaneously. The main conclusions are drawn as follows:
Due to input constraints in the MCACC algorithm suggested, the longitudinal acceleration level can be restricted to a specific range, thus improving platoon overall quality while achieving driver permissible car-following performance.
The simulations confirmed the theoretical results regarding platoon stability and indicated that, in general, over-pursuit for tracking capability would affect the stability of the platoon, and meanwhile, platoon response time together with fluctuation degree of spacing errors would increase with the growth of requirements of ride comfort and fuel economy.
In addition, it is suggested that some performances previously mentioned should be sought under the premise of sufficient rear-end safety as well as platoon stability so as to enhance platoon adaptability against transient traffic scenarios in particular.
Footnotes
Acknowledgements
The authors would like to thank all the anonymous reviewers for their very constructive comments and helpful suggestions on this research work.
Handling Editor: Jose Ramon Serrano
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: The financial support of STS Plan of Chinese Academy of Sciences (no. KFJ-STS-ZDTP-045).