
Abstract
With the advancement in research on parallel robots, control theory is increasingly applied in the field of robotics. Owing to its robustness, sliding mode variable structure control is extensively used in parallel robots. This article presents an adaptive sliding mode control method for nonlinear systems. A parallel robot control model with adaptive fuzzy sliding mode control was designed based on a fuzzy neural network control theory, and simulation results demonstrate its effectiveness of the method.
Keywords
Introduction
Hunt, an Australian professor of Mechanism, proposed that a parallel mechanism can be used as a robotic mechanism. Maccallion first used this mechanism to design a manipulator that was successfully applied to an assembly line. Parallel robots compensate for the shortcomings of serial robots, thus expanding the application range of robots.1,2 Parallel robots have been widely used in virtual axis machine tools, flight simulators, robot manipulators, spacecraft docking mechanisms and the related ground-test equipment, motion simulators, satellite antenna devices, reversing devices, micro naval observatories, tracking and positioning systems for astronomical telescopes, multidimensional force sensors, and mobile entertainment platforms.
A parallel robot is a type of nonlinear dynamic system with strong coupling. Consequently, traditional control methods are ineffective in controlling parallel robots, limiting their application in practice. Therefore, designing a proper control method for parallel robots is of great theoretical significance and practical value. The relevant research is divided into two main directions. Regarding the first direction, a dynamic modeling method is developed or improved on the basis of the requirements of parallel robot control, which makes the kinetic equation simple in form and easy to calculate without affecting the quality of robot control. The second direction concerns the control method. By developing or improving the control method, not only can the stability of the parallel robot system be guaranteed but also the dependence on the calculation of the dynamic model can be reduced to the greatest extent.
Research on control methods for parallel robots is scant, and some of their aspects are still being studied. Traditional control algorithms include the proportional–integral–derivative (PID) algorithm and various PID combinations and decoupling methods. Because of its simplicity and reliability, the PID algorithm is extensively used in motion control. Modern control methods include H∞ control, adaptive control, predictive control, and sliding mode variable structure control. Sliding mode variable structure control is a type of nonlinear control that is characterized by control of discontinuity. That is, parameters can constantly change in accordance with the current state of the system, forcing the system to move according to the desired state trajectory. Once the state trajectory is in motion, the system is invariant to parameter perturbations and external disturbances. Since sliding mode variable structure control is highly robust, it has found widespread application in the field of parallel robots.3,4 Sliding mode control (SMC) has considerable advantages, such as simplicity of control, decoupling of the control object, convenience of realization, and system cost reduction, which are conducive to its widespread application. However, SMC exhibits high-frequency chattering, which occurs in the dynamic process of the parallel robot system. Because the system does not have a modeling module, the high-frequency chattering may stimulate high-frequency components of the modules, which is likely to make the system unstable. This shortcoming restricts the practical application of SMC. Furthermore, during the control process, external disturbances and parameter perturbations related to system uncertainty and dynamic characteristics related to the lack of a modeling module should be considered to improve control performance and hence achieve an appropriate controller design.
Intelligent control, which does not rely on mathematical models, can solve the problem of uncertainty in a system because it uses various artificial intelligence methods for calculation. Neural network control and fuzzy control are two main methods applied in parallel robots. To improve the learning algorithm and the network training process of parallel robots, a neural network for robot force control and an improved back-propagation (BP) neural network were introduced. 5 Furthermore, a parallel robot adaptive controller was designed by combining a 6-SPS parallel manipulator and an improved BP neural network. Based on the characteristics and simulation results of a parallel robot, a multiple-input multiple-output (MIMO) fuzzy control method was proposed. This method controls and simulates the 3 degrees of freedom (DOFs) of a parallel robot, and it can effectively reduce the control error, improve the control precision, and reduce the response time. At present, most intelligent control methods are used in conjunction with traditional and modern control methods. A cerebellar model articulation controller that adopts a decentralized control strategy was designed and used to eliminate nonlinear control elements, coupling effects, and uncertainties the learning system.6–9 As feed forward compensation, the controller makes the tracking error converge and guarantees system stability using PID as feedback control. Thus, a 6-PRRS parallel robot can be fast and have a stable trajectory.
Although research on parallel robots from the perspective of dynamics and control is not very common, the relevant research has revealed many practical applications of parallel robots. In this study, an SMC strategy based on sliding mode variable structure control theory and fuzzy neural network control theory was designed. On the basis of the control performance requirements of parallel robots, a parallel robot on a Stewart platform with 6 DOFs was selected as the study object and a dynamic model was established. The dynamic model was combined with an adaptive SMC strategy to counter interference, ensure the robustness of the control system, and thus weaken the chattering that occurs in conventional SMC.
Design of direct neural network SMC for 6-DOF parallel robot based on radial basis function learning
Control model
Figure 1 shows a 6-DOF parallel robot in a Stewart platform structure.
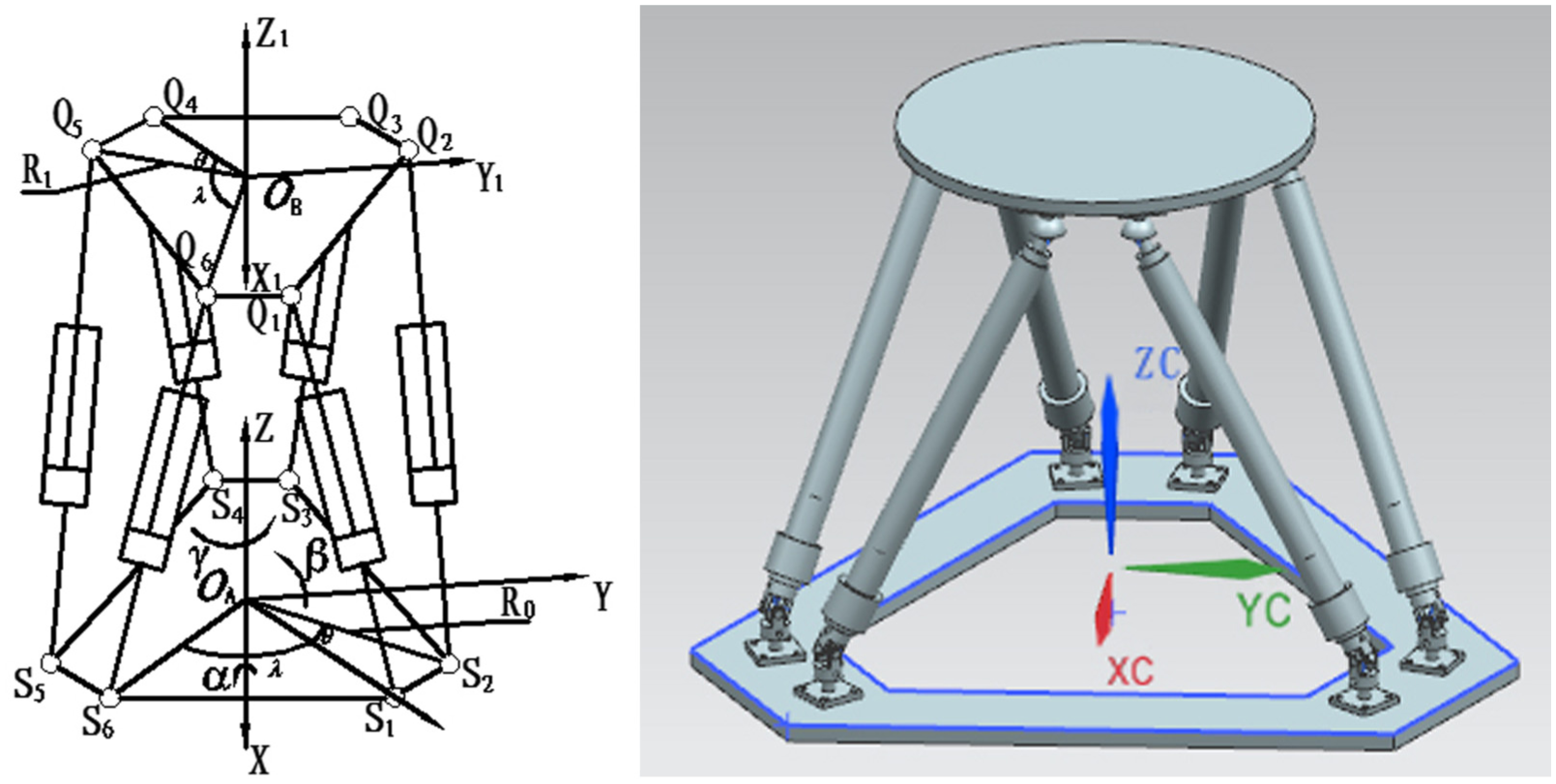
Stewart platform structure.
The Lagrange dynamics model of the parallel robot can be represented as

In Formula (1),
The governing equation of the 6-DOF parallel robot is as follows



Then

Therefore, the systematic state equation of the parallel robot is

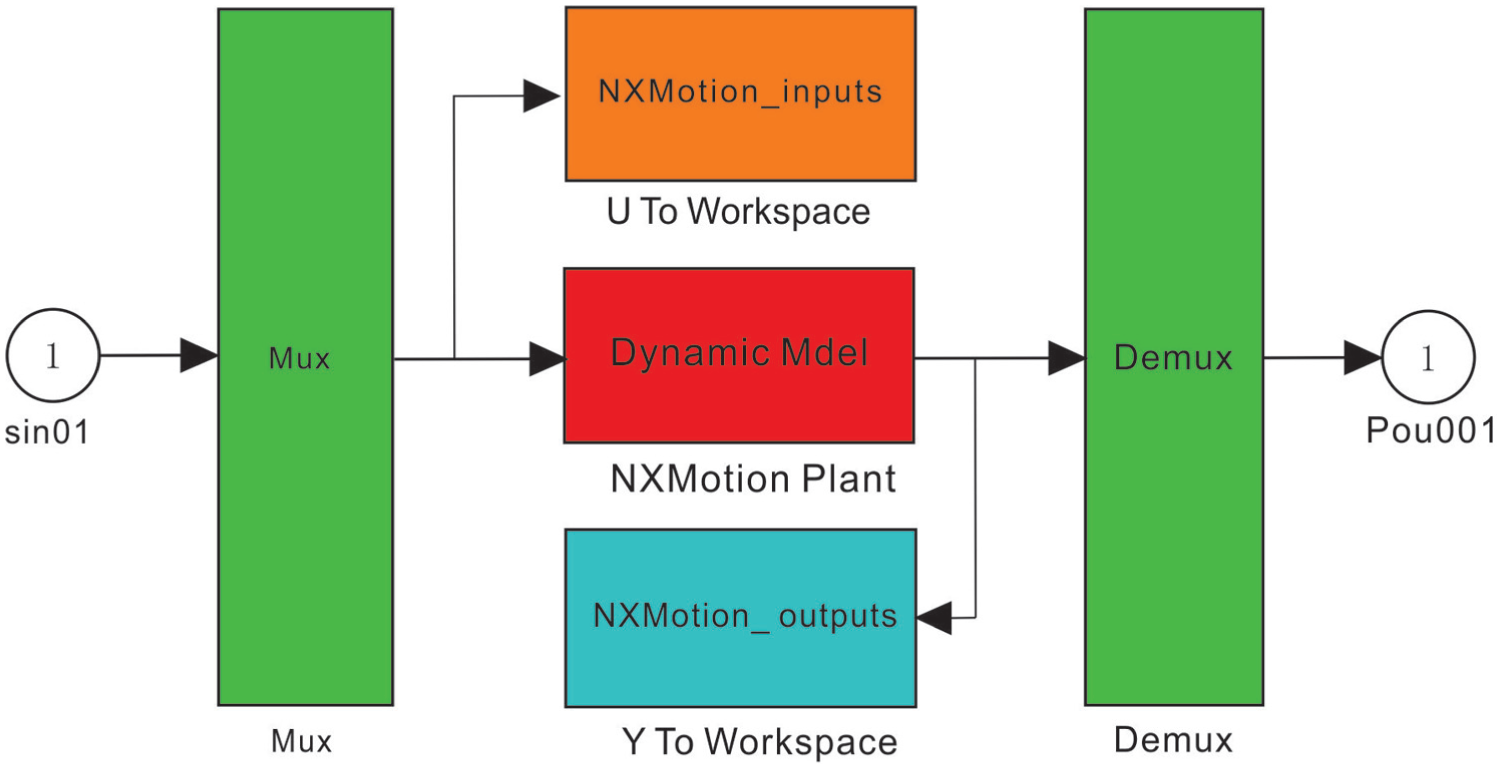
Control system structure
In the control system structure (figure 2), the target posture parameter module (ANNSMC Input) outputs and controls the objective expectation numerical value
If the position command signal is set as

where
We consider the sliding-mode surface as follows

where
According to the switching control method, the constant law is

where


If the sliding mode controller is designed as the output of a radial basis function (RBF) neural networks, then the following equation applies

where
The objective of SMC is to make

The equation is expressed as follows

Owing to


The learning algorithm for neural network weights is

The control system is stable (Figure 3 and Figure 4), and the accuracy and effectiveness of the controller. The error is small and less than 3.2%.

Fuzzy neural network sliding mode control chart.

Identification results.

Identification error.
Results and analysis
The initial posture and motion law are shown in Table 1. The simulation time is
Initial posture and motion law.

Internal package structure of sliding mode controller.

Curve of location tracking.

Outputs of controller
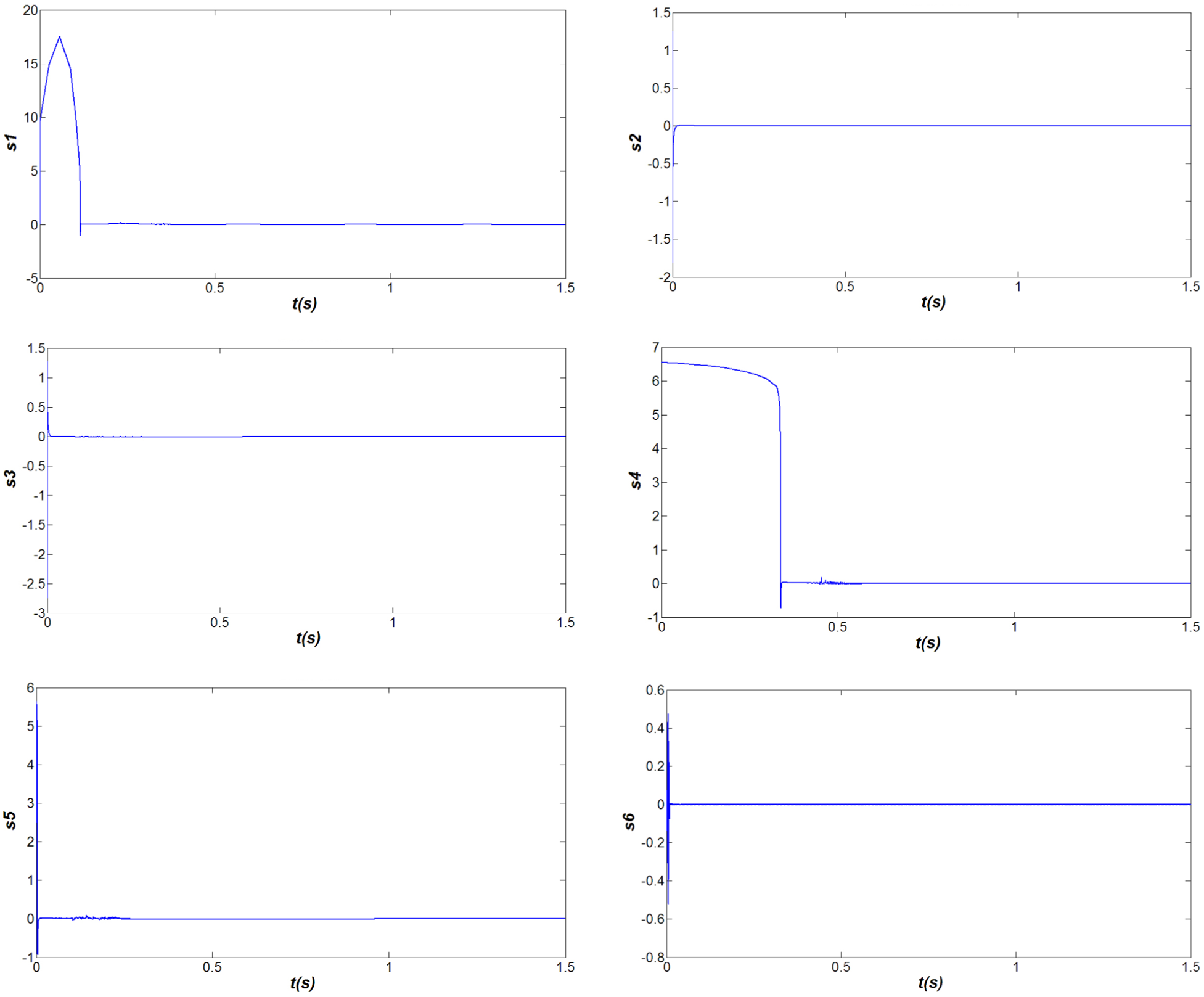
Switching function
Because the control structure in the direct neural network sliding mode takes
Conclusion
In this study, a switching function was used as the input of a fuzzy neural network. On the basis of the self-adaptability and fast response of the fuzzy neural network, a sliding mode controller was established. According to a simulation conducted using the Simulink tool of MATLAB, the proposed SMC is robust against parameter perturbations, is fast, and counters load disturbance. Therefore, the proposed SMC has theoretical significance in the application of intelligent control in parallel robot SMC. To reduce high-frequency chattering and enhance the robustness of control, this study adopted a combination of a RBF network and direct neural network SMC, thus taking advantage of the self-adaptability of the RBF network with the sliding mode controller as the input. Furthermore, the RBF network directly outputs the controlled parameter, softens the switching-control item of the sliding mode, and conducts simulation verification. Thus, the proposed method can reduce high-frequency chattering in the system.
Footnotes
Handling Editor: Chuanzeng Zhang
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by a grant from the Important Research Programs of Science and Technology Plan of Zhenjiang City (No. GY2016002).