
Abstract
For electro-hydraulic system of large flow and overloading, established position and pressure closed-loop control in accordance with the conventional hydraulic servo system theory that system control algorithm is complicated and difficult to implement. This article presents a method which gives priority to position closed-loop control and establishes the corresponding relation between pressure of hydraulic cylinder and load by collecting the pressure signal from rear cavity and rod cavity of hydraulic cylinder; meanwhile, applied position-pressure conversion formula will turn dynamic pressure signal into position signal and compensate the transformed position signal to the master position closed loop of the electro-hydraulic servo system which could achieve the position-pressure master-slave control. The simulation results show that the control method is correct, effective, and feasible. The results indicate that the method can achieve online converting between position and pressure which are different variables and improve the response speed and control precision of the system.
Keywords
Introduction
Large-flow, heavy-load, and pressure-position electro-hydraulic servo system with the advantages of fast-response high control precision and high output power is widely used in heavy-duty equipment. It is considered to be the most promising choice for modern industry and has become an indispensable control method in the metallurgical industry, mechanical manufacturing, construction machinery, and defense industries’ sophisticated equipment.
In order to improve the control precision of conventional electro-hydraulic servo systems for large-flow, heavy-duty, high-precision, and multi-degree-of-freedom (DOF) in conventional metallurgical equipment. L Quan et al., 1 based on the position and pressure control, conclude that only the closed-loop position and the pressure closed-loop structure are used, and the pressure and position controllers will not affect each other. Asymmetrical valves control asymmetric cylinders is a trend, especially in large systems with large load changes and high system accuracy requirements, and the establishment of asymmetric servo valve control servo cylinder models2,3 and asymmetric valve control asymmetric cylinder can improve the control accuracy, reduce the requirements of the servo valve and the oil on the equipment, and reduce the use cost.4,5 At the same time, the influence of different algorithms of proportional–integral–derivative (PID) adaptive fuzzy control on the control precision and the research of the function of adaptive fuzzy control on the system defect have been greatly developed.6–8 Zulfatman 9 applied PID controllers to the identification of industrial hydraulic drive systems to improve the control accuracy of electro-hydraulic servo systems. JB Lei et al. 10 studied the proposed sliding-mode controller over a PID controller when the load varies within a certain range. HY Han et al.11,12 proposed a new type of composite link rolling shear and established the motion and balance equations to calculate the data of the shearing mechanism’s motion curve and cylinder position and pressure. YH Bai and L Quan. 13 adopted a dual-flow valve control scheme and specifically used a fast-response servo valve for flow compensation. The maximum dynamic error using this solution can be reduced by 75%. G Shen et al.14,15 proposed a new controller and hybrid controller combining offline designed feedback controller (ODFC) and online adaptive compensator, which effectively improved the control accuracy of the electro-hydraulic proportional system. With the continuous development of technology and the continuous improvement of the control precision requirements, in the large-flow, heavy-load, high-precision, and multi-DOF electro-hydraulic servo system should not only ensure the position control accuracy but also solve the problem which high strength load to the system’s shock and the position deviation of the hydraulic cylinder, while considering pressure deviation impact on the equipment. This requires high-precision control of position meanwhile achieves precise control of pressure. The control mechanism has obvious difference between position closed-loop and pressure closed-loop, the control variable need to be converted and unified in order to achieve the simultaneous reasonable online control between position and pressure in one process.
In order to meet the above requirements, this article proposed a position-pressure master-slave control method of electro-hydraulic servo system as shown in Figure 1. The specific approach is that in the low pressure and a certain range, the system is only controlled by position closed loop, which is due to electro-hydraulic servo valve opening range and closed-loop gain value of the entire electro-hydraulic control system are large, and the response of the whole system is relatively stable in a situation of position closed-loop control. When the pressure reaches a certain high-pressure range, the corresponding relation between pressure of hydraulic cylinder and load by collecting the pressure signal of rear cavity and rod cavity of hydraulic cylinder could be established, meanwhile applying position-pressure conversion formula will turn dynamic pressure signal into a position signal, then, compensating the transformed position signal to the master position closed loop of the electro-hydraulic servo system to achieve the position-pressure master-slave control. This method not only simplifies the control process but also guarantees the control precision and stability of the position and pressure at the same time to make the two control variables of position and pressure reasonably in the same control process to achieve the dynamic compensation and coordination control.

Master-slave control theory diagram.
Mathematical model of electro-hydraulic servo system
The simplified model of the common electro-hydraulic servo system is shown in Figure 2, which includes proportional servo valve and asymmetric hydraulic cylinder. The servo valve flow equation, hydraulic cylinder flow continuity equation, and the force-balance equation of the hydraulic cylinder with load need to be deduced in order to deduce the mathematical model of electro-hydraulic servo system.

The servo valve control servo cylinder schematic.
Building the mathematical model of position master control of valve control cylinder
The flow equation of servo valve
When the servo valve control servo cylinder is stable, it satisfies the stable equilibrium equation

where
The direction of piston rod of the servo cylinder stretched out is a positive direction, the pressure of loads is
From equation (1), we get

For the cylinder, set

The output power of the cylinder is

Then the load-flow is

where
In order to better analyze and study the performance of the leveler press control system formula (5) is linearized, and based on the Tailor formula, a first-order Tailor series expansion is performed near a certain operating point

Linearized equation of servo valve incremental form is as follows



where
In order to simplify the operation equation (7), it can be written as

The flow continuity equation of servo cylinder
In order to deduce the flow continuity equation of servo cylinder, this article assumes that the ideal conditions are as follows: the pipeline loss and the dynamics of the pipeline can be neglected; the oil bulk modulus and the temperature can be regarded as constants, the internal and external leakage of servo cylinders are laminar flow. Flow continuity equation of servo cylinder can be got

where

where
The equilibrium equation between servo cylinder and load
The dynamic characteristics of hydraulic power component are affected by load characteristic. Load force generally includes an inertial force, viscous drag, the elastic force, and any external load force.
The dynamic equilibrium equation of the cylinder and loads is

where
The transfer function of servo valve control servo cylinder
By using Laplace transform to the equations (10), (11), and (13), we can get



According to equations (14)–(16), we get the servo cylinder piston displacement calculation formula (as shown below) under the action of the servo valve spool displacement and load.
At the same time, we get the transfer function of master control of position as follows

where

Building the mathematical model of pressure valve control of valve control cylinder
This article defined a position-pressure conversion formula expressed with

where
Set the load pressure


Set equation (20) minus equation (8), we can get

In the process of practical work, the change of acceleration and speed is very small during the time of

According to the position-pressure master-slave control requirements of valve control cylinder electro-hydraulic servo control system, we get the main calculation basis in the transformation control model, as is shown in the following formula

where
From equation (22) and (23), we get

Building the mathematical model of other control elements
The mathematical model of displacement sensor
Displacement sensor response frequency is far greater than the response frequency of the whole system, hence its transfer function is approximated with the proportional element

where
The mathematical model of pressure sensor
Pressure sensor has advantages of small volume and high sensitivity and good stability, the role of sensor is pressure signal acquisition by computing and transforming it into a feedback current signal, which is proportional to the pressure

where
The mathematical model of position-pressure master-slave control
According to the system components and the master-slave control principles, combined with the conversion formula of pressure, the position-pressure master-slave control system block diagram as shown in Figure 3.

The position and pressure master-slave control system block diagram.
Where
Simulation of the system
In this article, relevant parameters of the electro-hydraulic servo system, as is shown in Tables 1 and 2.
The parameter in hydraulic system.

The parameter of main working element.

Aiming at the proposed position-pressure master-slave control method, in this article, using MATLAB/Simulink software simulate the straightening Q345B steel plates process of straightening machine under the condition of the output power is 5.5 × 103 kN in a single servo cylinder. As is shown in Figure 4, simulation model of position-pressure master-slave control of electro-hydraulic servo system can be represented.

Electro-hydraulic servo position-pressure master-slave control system simulation model.
As is shown in Figures 5 and 6, system simulation time is 5.5 s, and the load pressure signal is loaded when the simulation time is 0.4 s, we obtain the simulation position curve of the cylinder and pressure curve.
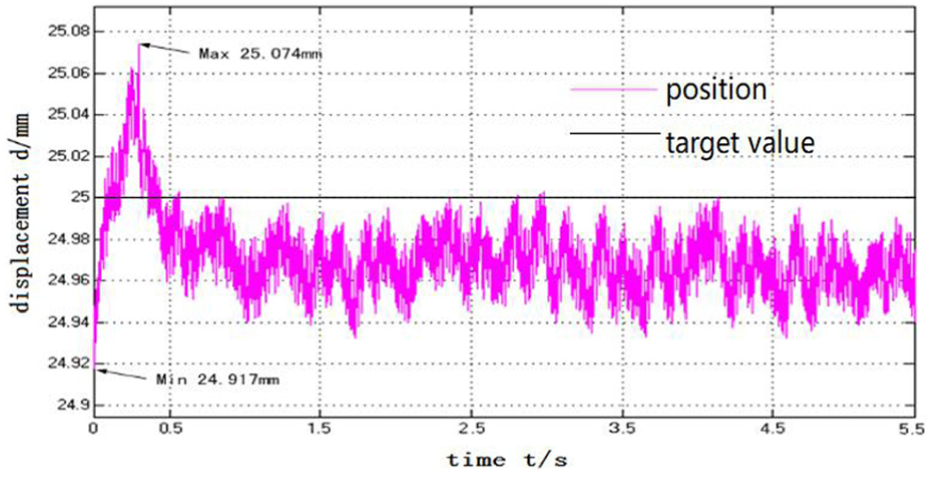
The position simulation curve of straightening 25 mm Q345B steel.
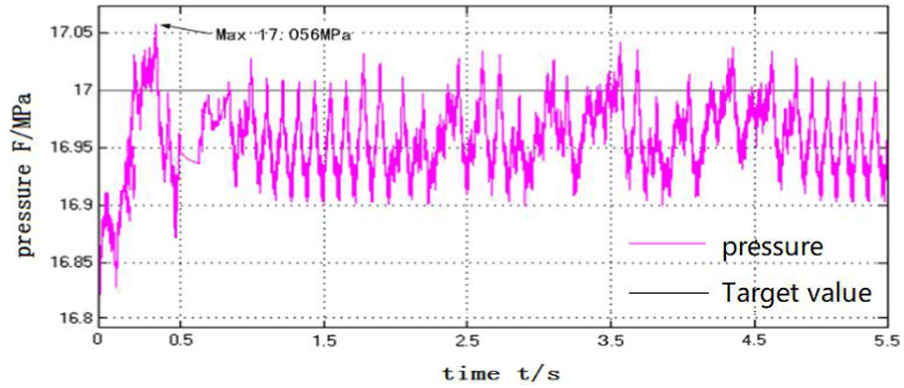
The pressure simulation curve of straightening 25 mm Q345B steel.
From the data (Figure 5) in the field, it is known that the displacement is fluctuated when the master-slave control system of single servo cylinder is loaded instantly, maximum fluctuation to 25.074 mm and the minimum fluctuation to 24.917 mm. The impact of load has not been dramatic after the adjustment of the master-slave control method which has replied to load change quickly and make position steadily in a very short time that location control accuracy within 0.066 mm.
From the data (Figure 6) in the field, it is known that the pressure response is lagged and then increased rapidly when the master-slave control system of single servo cylinder is loaded instantly. This is because the load leads to fluctuating position, and then the results in pressure change needs certain time response. After establishment of pressure, the pressure response increases rapidly and appears a fluctuation phenomenon that maximum fluctuates to 17.056 MPa. The transformation that pressure turns into position during the process that makes the deviation of the average pressure of cylinder is controlled in less than 0.1 MPa after the system is stable.
From the simulation results above, it is known that position-pressure master-slave control system can quickly reply to pressure fluctuation by load changes caused, thereby adjusting the position control of the system, guarantee high precision of position control, meanwhile also can control pressure of the system. This control method is not only correct and feasible but could be achieved better using online unified control of different variables for position and pressure.
Experimental studies
All experiments were performed on eleven-roll-plate leveler equipment of Wuyang Iron & Steel Co., Ltd. and installed HYDAC pressure sensor, MTS displacement sensor, and REXTROH high-response servo valve on the hydraulic cylinder in order to obtain accurate data. Research the straightening Q345B steel plate process of straightening machine under the condition of the output in double servo cylinder. Block control schematic of the experiment, as is shown in Figure 7.
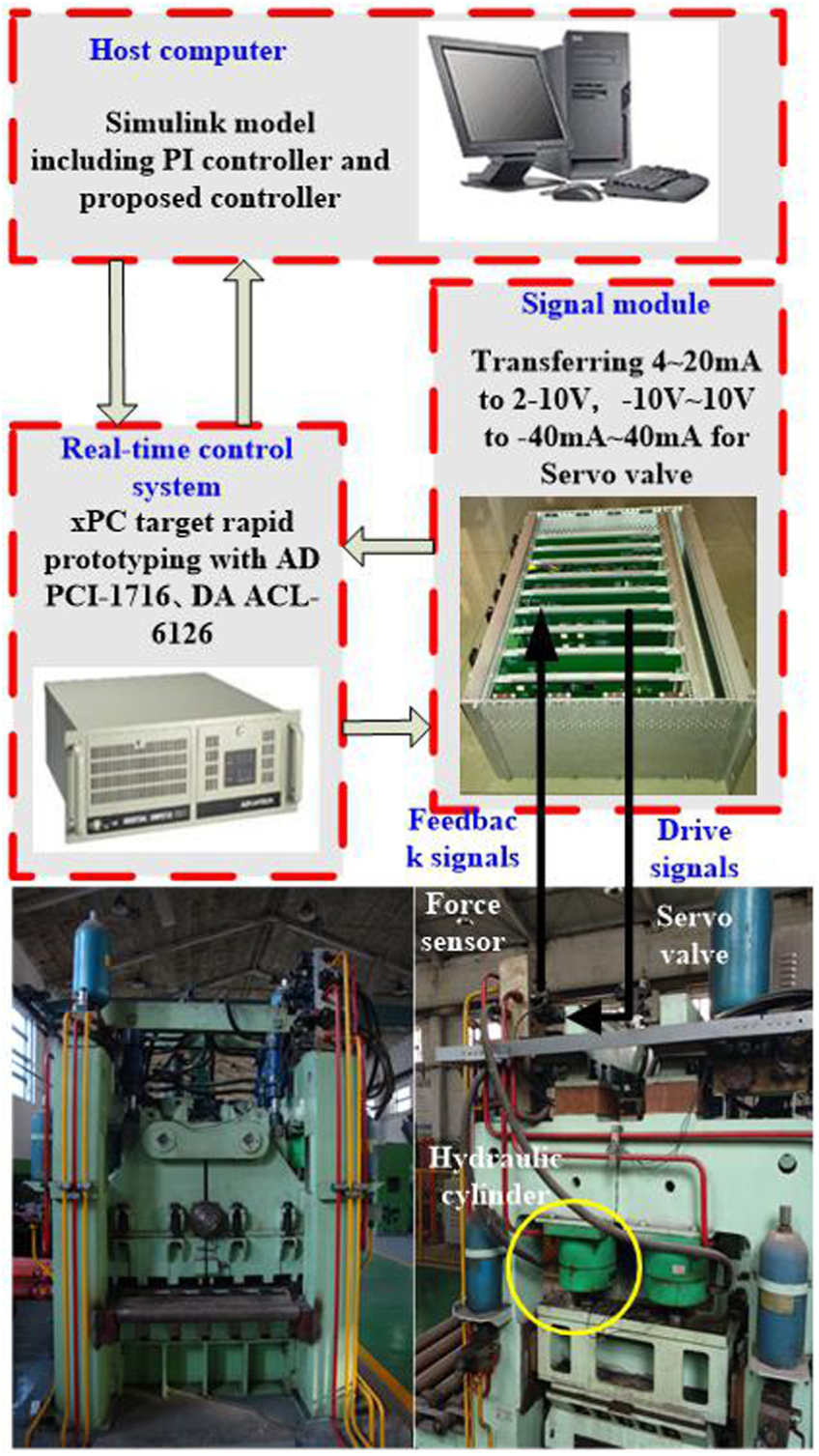
Block control schematic of the experiment.
Set the roll gap value as 25 mm, when system tends to be stable after contacting load, respectively, collecting the roll gap value and the pressure signal of servo cylinder. The comparison of roll gap experimental fluctuations is shown in Figure 8. The comparison of experimental pressure fluctuations is shown in Figure 9.
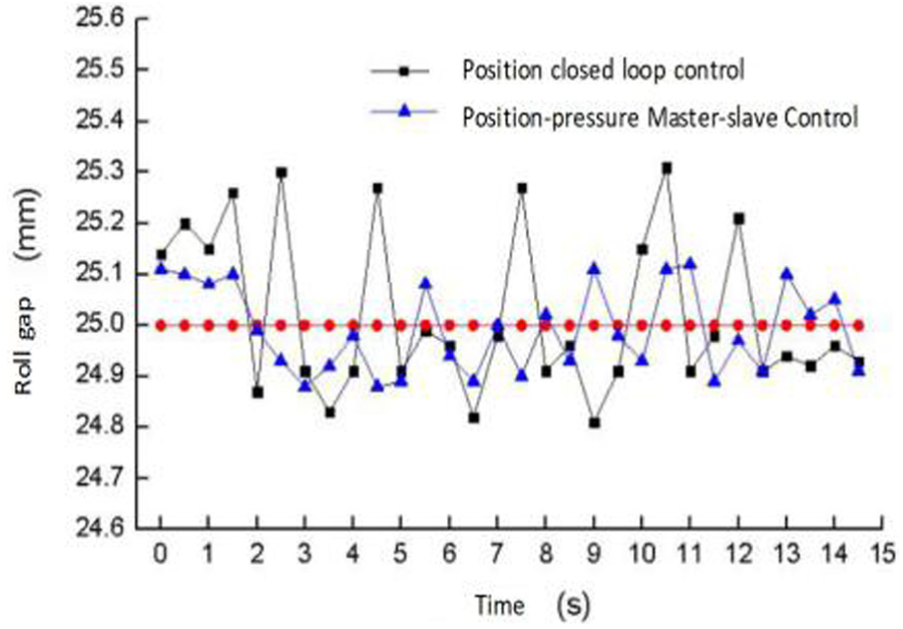
The comparison of roll gap experimental fluctuations.

The comparison of experimental pressure fluctuations.
From the table data and Figure 8, under position closed-loop control, the maximum deviation between the experimental value and the target value of the roll gap position of the servo cylinder is 0.31 mm, the average deviation is controlled within 0.131 mm; under the position and pressure master-slave control process. The maximum deviation between the experimental value and the target value of the roll gap position of the servo cylinder is about 0.12 mm, and the average deviation is controlled within 0.078 mm. It can be seen that the latter has higher position control accuracy. According to the table data and Figure 9, under position closed-loop control, the pressure deviation of the servo cylinder is 0.55 MPa at the maximum, the average deviation is controlled within 0.402 MPa; under the position and pressure master-slave control, the pressure deviation of the servo cylinder is 0.42 MPa and the average deviation is controlled within 0.3 MPa. It can be seen that both the closed-loop position control and the position-pressure master-slave control can satisfy the working requirements of a single hydraulic cylinder system, while the latter has a better pressure control effect.
Therefore, the Simulink simulation result of position-pressure master-slave control is ideal because Simulink simulation system is based on electro-hydraulic servo system mathematical model of position-pressure master-slave control which ignores the impact of nonlinear instability and other factors. Thus, no matter the control accuracy or the deviation of simulation results is better than the experimental results, while in the field experiment, when the hydraulic oil has different temperature and gas content, it causes different hydraulic spring stiffness. Hence, the experiment error and the simulation error have a certain gap.
Discussion
The proposed method in this article has improved the control accuracy of position of the system: the simulation position maximum deviation is about 0.083 mm, the average deviation is controlled in less than 0.066 mm; the position maximum deviation by experiment between experimental value and target value is about 0.12 mm, the average deviation is controlled in less than 0.078 mm. The simulation pressure maximum deviation is about 0.207 MPa, the average deviation is controlled in less than 0.1 MPa; the pressure maximum deviation by experiment between experimental value and target value is about 0.42 MPa, the average deviation is controlled in less than 0.3 MPa. This control method can satisfy the needs of actual production.
The proposed method in this article mainly carried out on a single servo cylinder system by modeling, simulation, and experimental research. Later work requires a combination of multi-DOF feedback decoupling control theory knowledge and the online calculating partial load of hydraulic cylinder theory to research dynamic change and put the single cylinder position-pressure master-slave control model into the multiple control channels in order to achieve the precision master-slave control of multi cylinder electro-hydraulic system.
Conclusion
In conclusion, through simulation and experimental research, it was found that the proposed idea of control method is simple, which can achieve online converting between position and pressure which are different variables and improve the response speed and control precision of the system. The position control accuracy of the entire leveler control system can be improved, and the position and pressure of the system can be controlled more reasonably at the same time, which also has certain guiding significance to other electro-hydraulic servo system design and research.
Footnotes
Acknowledgements
H.H. and Z.L. were responsible for building a model and performed the experiment and wrote the paper. Y.L. and L.M. were responsible for the acquisition and analysis of experimental data. L.Q. supervised the research.
Handling Editor: Farzad Ebrahimi
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work is supported by the National Natural Science Foundation of China (grant no.: 51505315, “Youth SanJin scholars” plan in Shanxi Province, Focus on research and development plan in Shanxi Province (201603D111004, 201603D121010),and the Taiyuan Heavy Machinery and Equipment Collaborative Innovation Center funded at the provincial level, sponsored by the Fund for Shanxi “1331 Project” Key Subjects Construction.