
Abstract
This article proposed a strong robust observer of distributed drive electric vehicle states, including yaw rate, sideslip angle, and longitudinal velocity. Based on strong tracking filter algorithm framework, the proposed observer realized a strong tracking-iterative central difference Kalman filter by introducing a time-varying fade factor into iterative central difference Kalman filter. The introducing of time-varying fade factor assigns approximate orthogonality to residual error, which improves robustness of the observer at mutation conditions. Calculation efficiency and accuracy are improved by applying central difference transformation to approach posterior mean and posterior co-variance. By correcting variance and co-variance with combination of states updating and Gauss–Newton iteration, the observer also achieves high estimation accuracy and convergence rate. Finally, the observer was simulated in vehicle dynamics simulator veDYNA at slalom test and double lane change test with high and low road friction coefficients, respectively. Simulation results have verified that the observer has higher estimation accuracy as well as robustness comparing to extended Kalman filter.
Keywords
Introduction
Advanced vehicle stability control systems could improve stability and handling of distributed drive electric vehicle (DDEV) effectively. The performance of the control systems depends on identification of vehicle states significantly, which makes accurate states estimation as a required function of the control systems. DDEV certainly will become an important development direction for next-generation electric vehicles due to its significant control advantages in terms of stability, active safety, and energy saving over traditional vehicles.1–5 Advanced vehicle stability control systems and technologies, such as electronic stability control (ESC), anti-locking brake system (ABS), active front-wheels steering (AFS), and direct yaw-moment control (DYC), both can effectively improve handling and stability of DDEV.6–10 It is commonly recognized that performance of the control systems heavily depends on knowledge of vehicle states information, which characterizes longitudinal and lateral stability of vehicles, such as yaw rate, sideslip angle, and longitudinal velocity.11–15
For DDEV, it is measurement of sideslip angle and longitudinal velocity that needed expensive and dedicated sensors directly. Therefore, for cost savings and practical application considerations, it is necessary to propose a soft measurement approach to estimate DDEV states with high precision based on commonly low-cost sensors of production vehicle such as accelerometer and steering angle sensor. BL Boada et al. 16 developed a constrained dual Kalman filter based on probability density function truncation for estimation of vehicle states and road bank angle. Although this method achieves a good estimation accuracy by considering the parameter physical limitations, there is still a disadvantage that it requires direct measurements of some states such as sideslip angle and road bank angle.
A variety of model-based methods have been proposed to realize an accurate estimation of yaw rate, sideslip angle, and longitudinal velocity, which is designed based on two or more of freedom vehicle dynamics model or vehicle kinematics model generally, some including tire model.17,18 Both the model-based methods have their own merit, however, these method are sensitive to nominal model and sensors error or drift. BJ Zhang et al. 19 proposed a Takagi–Sugeno (T–S) observer to estimate steering angle and sideslip angle with direct measurements of yaw rate and vehicle velocity simultaneously. This novel observer is robust against parameter uncertainties and unknown inputs despite the variation of vehicle longitudinal velocity, but it did not give validation with low road friction coefficient; in other words, its effectiveness at extreme conditions is not clear. X Li et al. 20 proposed a reliable fusion methodology to estimate sideslip angle and yaw rate simultaneously. This methodology designs an adaptive inference mechanism to adapt to complex driving situations, such as GPS failure and various driving maneuvers; however, its co-variance matrix of measurement noise vector needs to be adjusted according to change of the ground velocity and the method of adjustment is not given. L Li et al. 21 designed a variable structure extended Kalman filter for sideslip angle estimation on a low road friction coefficient; the filter realizes an high precision estimation of sideslip angle by introducing a sideslip angle rate feedback algorithm to compensate the model error caused by road friction estimation inaccuracy while that of the damping item is to suppress the error accumulation. But this filter has an obvious limitation that it is sensitive to parameters of tire model, which means the filter might lose effectiveness if parameters of tire model are not matching. H Shraim et al. 22 proposed an approach to identified tire longitudinal forces, sideslip angle, and velocity using a third-order sliding mode observer. Although this high-order sliding model observer has a strong robustness to uncertainty and vibration, its criterion for the observer gain is not given, which is crucial for observer performance. In summary, it is necessary to design an observer to estimate DDEV states which based on commonly low-cost sensors of production vehicle and is not sensitive to parameters of nominal model and initial values and parameters of observer.
At present, a great deal of research on vehicle states observer based on Kalman filter algorithm has been carried out. In general, estimation accuracy of Kalman filter mainly depends on nominal model and noise (including process noise and measurement noise) statistics. 23 It is excellent performance of strong tracking filter (STF) such as strong robustness to nominal model mismatching, less sensitivity to noise and initial conditions, and strong tracking capability for mutant states. 24 Iterative central difference Kalman filter (ICDKF) adopts Stirling’s interpolation formula to approximate nonlinear functions; thus, high-order truncation error caused by linearization of first-order Taylor expansion can be avoided. In addition, ICDKF corrects residual error variance generated using Gauss–Newton iteration, and improving estimation accuracy and convergence rate by reusing the observed information and replacing predicted value with observed updated states. 25 ICDKF has been applied in the fields of radar passive location, target tracking, navigation and positioning, and so on and has shown excellent performance in estimation.26–28 It has not been applied in estimation of DDEV states. This article proposes a strong tracking-iterative central difference Kalman filter (ST-ICDKF) to estimate DDEV states, including yaw rate, sideslip angle, and longitudinal velocity. The proposed observer has both merits of STF and ICDKF.
The rest of this article is organized as follow: section “Vehicle dynamics model” builds a nonlinear 3-degree-of-freedom vehicle dynamics model as nominal model of the proposed observer. A strong robust observer of DDEV states based on ST-ICDKF algorithm is developed in section “Observer design of DDEV states.” Then, simulation model of DDEV in environment of vehicle dynamics simulator veDYNA is established and simulation verification of the proposed observer as well as the corresponding discussion is demonstrated in section “Result and discussion.” Finally, detailed conclusions of this research are presented in section “Conclusion.”
Vehicle dynamics model
The 3-degree-of-freedom vehicle dynamics model of DDEV as nominal model of the proposed observer is shown in Figure 1.

Vehicle dynamics model.
The detailed formula expression of the nominal model is shown as equations (1)–(4)




By discretizing equations (1)–(4), equations (5)–(8) can be obtained




where equations (1)–(3) are states equation and formula (4) is observation equation of the proposed observer, γ is yaw rate, β is sideslip angle, vx is longitudinal velocity, δ is front wheel steering angle (δ = δsw/i, δsw is steering wheel angle; sideslip angle of tire is ignored), ax is longitudinal acceleration, ay is lateral acceleration, Δt is sampling time interval, while k = 0, 1,…n represents sampling time step. The vehicle parameters are shown in Table 1.
Vehicle parameters.

Observer design of DDEV states
In general, equations (5)–(7) and (8) can be represented as equations (9) and (10), respectively


where state x =[γβ vx]T, input u =[δ ax]T, measurement y = ay, fk(•) is nonlinear operator of equation (9), hk(•) is nonlinear operator of equation (10). ξ and η are process noise and measurement noise, respectively. The noise also follows equations (11) and (12) at the same time


And there is an assumption that ξ and η are irrelevant.
Extended Kalman filter observer
Extended Kalman filter (EKF) linearizes nonlinear states equation and nonlinear observation equation with first-order Taylor expansion as process below:
Step 1. Prediction
Equations (13) and (14) are states prediction and states prediction error variance, respectively


Step 2. Updating
Equations (15)–(17) are observer gain, states estimation, and states error variance estimation, respectively



where


Strong robust observer
Based on nominal model in section “Vehicle dynamics model,” this section designs a strong robust observer ST-ICDKF of DDEV states by combining STF algorithm and ICDKF algorithm. This method introduces a time-varying fade factor into states prediction error variance to assign approximate orthogonality to residual errors according to the orthogonality principle. As a result, all useful information can be extracted from residual error effectively, which makes the observer has strong tracking capability to mutation conditions.
Specifically, the main advantages of STF include the following:
Strong robustness on model parameters mismatching;
Less sensitivity on noise and initial conditions;
Strong tracking capability for mutation conditions as well as steady conditions;
Less complex calculation required.
Without dealing with Jacobian matrix, central difference transformation is utilized to approach posterior mean and posterior co-variance of nonlinear systems. Therefore, calculation efficiency and filter accuracy can be improved considerably.
And Gauss–Newton iteration is introduced for correcting variance and co-variance. By reusing observation information and replacing states prediction with filtered states, the observer also achieves higher estimation accuracy and convergence rate than EKF.
The detailed observation process of ST-ICDKF is demonstrated as follows. Schematic of the proposed observer is shown in Figure 2.
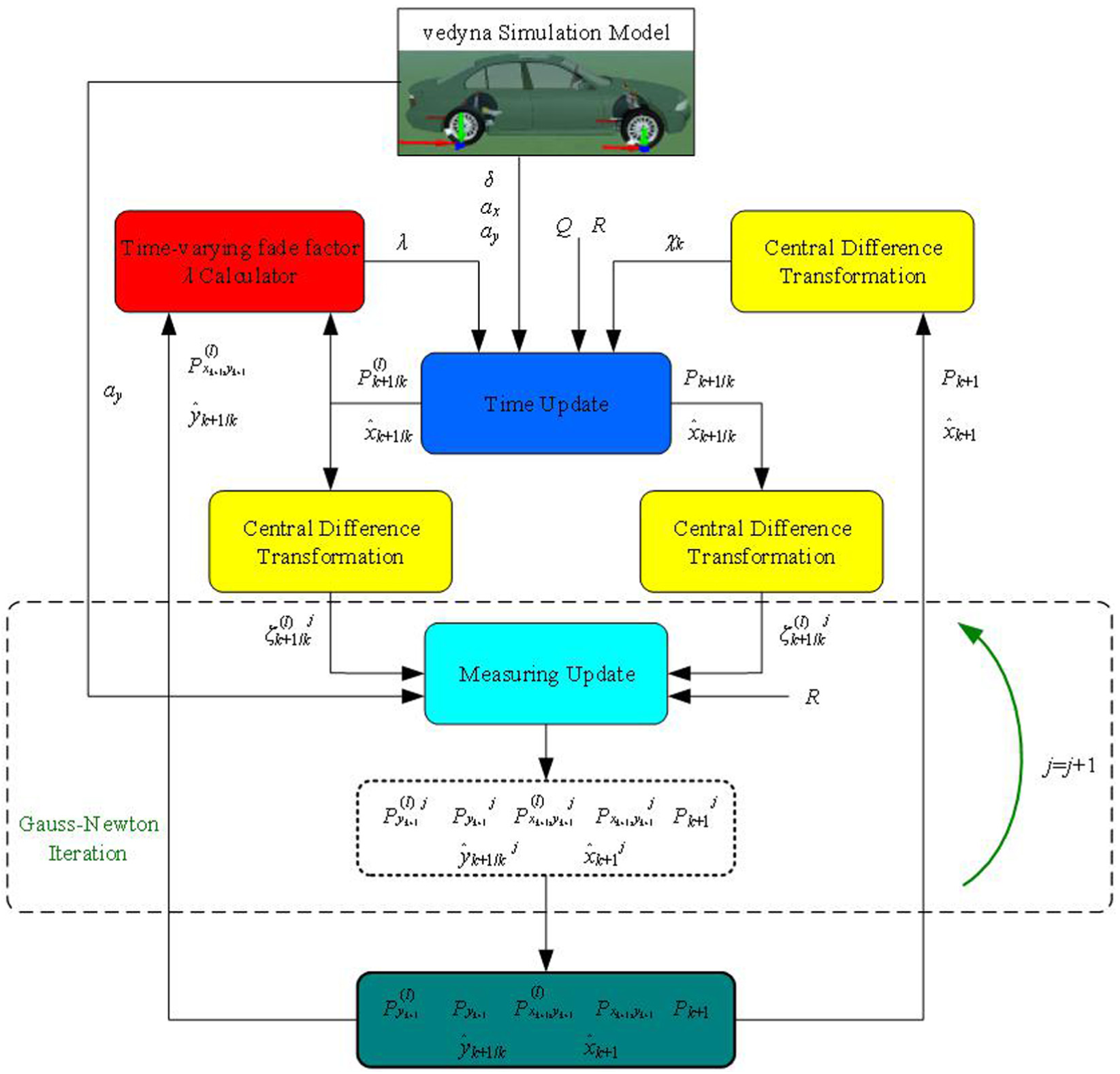
Schematic of the proposed observer.
Step 1. Initialization
Initial values of states and states error variance are set by equations (20) and (21)


Step 2. The sigma point set of xk and Pk can be built based on symmetry sampling in equation (22)

where h is central difference interval, whose optimal value is
Step 3. Time update calculation
Communicating xk to xk + 1|k through fk(•) as equation (23)

In order to improve robustness of the observer for system uncertainty, time-varying fade factor λ is introduced into


where equation (24) is performance indicator of the observer while equation (25) requires orthogonal of output variance at any time.
For estimation of DDEV states, uncertainty of nominal model should lead to non-orthogonal of observer output variance. The observer based on conditions (24) and (25) assigns orthogonal to variance by introducing a time-varying fade factor. Similar to white noise in Gaussian systems, all useful message in variance series can be extracted at most. As a result, tracking capability of the observer can be kept when nominal model is uncertain.
There are three states in nominal model, so n = 3.

where

where time-varying fade factor is obtained by the method shown in equations (29)–(34)






where tr(•) is operator for matrix trace calculation,
Step 4. Measuring update
Initialization of the iteration

Iteration loop
for j = 0,… , N
Based on symmetry sampling, building sigma point set of xk and Pk without introduced time-varying fade factor

where j = 0, 1, 2,… , N represents the iteration time.
Communicating

Prediction of measured value

Based on symmetry sampling, build sigma point set of

Communicating

Variance of measured variable

Observer gain

Updating states and states error variance using standard Kalman filter in equations (46) and (47)


Iteration is finished, variance and co-variance with and without time-varying fade factor can be obtained, as well as the observation prediction, states estimation, and states error variance are shown in equation (48), as follows
where iteration number N = 3 in this research.
Result and discussion
To verify functionality and performance of the proposed observer, simulation has been carried out utilizing veDYNA. veDYNA is an advanced vehicle dynamics simulator based on MATLAB/Simulink. It provides ports to Simulink model for data reading and writing. This research modified the default powertrain model of BMW_325i in veDYNA by cutting off default powertrain and applying electric motors of veDYNA own to output torque to four driving wheels. Therefore, DDEV model is developed. The proposed ST-ICDKF algorithm is realized by s-function in MATLAB.
For quantitatively analysis accuracy of the proposed observer, mean absolute error (MAE), root mean square error (RMSE), and peak of absolute error (PAE) as performance indexes of observer between estimated states and veDYNA states are calculated as equations (49)–(51), as follows



Figure 3 shows simulation animation of veDYNA.

Simulation animation of veDYNA: (a) slalom test and (b) double lane change test.
Slalom test
Simulation for slalom test has been carried out with road friction coefficient μ = 0.85 and μ = 0.3, respectively. Vehicle speed is set to 65 km/h and simulation step is 1 ms. The initial conditions of ST-ICDKF are states x0 =[0 0 0]T, states error variance P0 = I3 × 3, process noise variance Qk = I3 × 3, and measurement noise variance Rk = 104. The initial conditions of EKF are same as ST-ICDKF.
Simulation results of two road friction coefficients are shown in Figures 4 and 5, respectively, while performance indexes are shown in Tables 2–5, respectively.

Estimation results of EKF and ST-ICDKF comparing to veDYNA at slalom test with road friction coefficient μ = 0.85: (a) yaw rate, (b) sideslip angle, and (c) longitudinal velocity.

Estimation results of EKF and ST-ICDKF comparing to veDYNA at slalom test with road friction coefficient μ = 0.3:(a) yaw rate, (b) sideslip angle, and (c) longitudinal velocity.
Performance indexes of EKF at slalom test and μ = 0.85.

EKF: extended Kalman filter; MAE: mean absolute error; RMSE: root mean square error; PAE: peak of absolute error.
Performance indexes of ST-ICDKF at slalom test and μ = 0.85.

ST-ICDKF: strong tracking-iterative central difference Kalman filter; MAE: mean absolute error; RMSE: root mean square error; PAE: peak of absolute error.
Performance indexes of EKF at slalom test and μ = 0.3.

EKF: extended Kalman filter; MAE: mean absolute error; RMSE: root mean square error; PAE: peak of absolute error.
Performance indexes of ST-ICDKF at slalom test and μ = 0.3.

ST-ICDKF: strong tracking-iterative central difference Kalman filter; MAE: mean absolute error; RMSE: root mean square error; PAE: peak of absolute error.
It can be known from performance indexes that ST-ICDKF has a higher accuracy and tracking capability comparing to EKF, with most of performance indexes more optimized. More specifically, although sideslip angle estimated by ST-ICDKF and EKF are very close on two different roads, ST-ICDKF has smaller performance indexes of yaw rate and longitudinal velocity than EKF. It is worth noting that for each state, magnitude relationship is β < γ <vx. Therefore, it is easy to know from Tables 2–5, the value of each state should also follow β < γ <vx. In addition, for road with higher road friction coefficient, performance indexes are smaller than those of lower road friction coefficient. Thus, it can be obtained by analyzing Tables 4 and 5 that for vx, maximum MAE of ST-ICDKF is 34.23%, which is much better than 83.02% of EKF. RMSE and PAE of ST-ICDKF are 25.22% and 1.3434 km/h, respectively, and better than the value of 105.56% and 3.7613 km/h of EKF. On the other hand, as shown in Figures 4 and 5, ST-ICDKF provides a better tracking capability than EKF. In general, it is proved that the proposed observer provides higher accuracy and stronger robustness than EKF in slalom test.
Double-change test
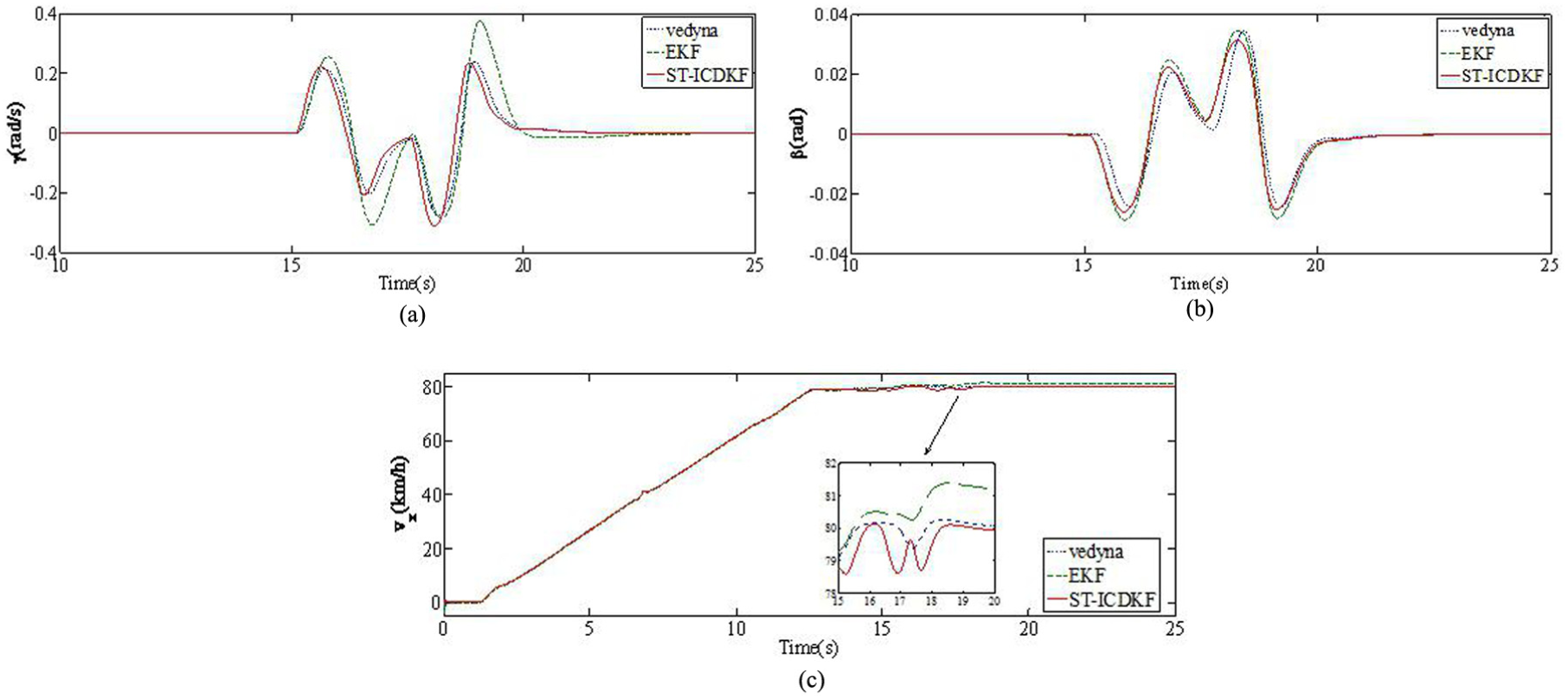
Simulation for double lane change has been carried out with road friction coefficients μ = 0.85 and μ = 0.3, respectively, with the same parameters and initial conditions of slalom test simulation. Vehicle speed is set to 80 km/h. Simulation results of two road friction coefficients are shown in Figures 6 and 7, respectively, while performance indexes are shown in Tables 6–9, respectively.

Estimation results of EKF and ST-ICDKF comparing to veDYNA at double lane change test with road friction coefficient μ = 0.85: (a) yaw rate, (b) sideslip angle, and (c) longitudinal velocity.
Estimation results of EKF and ST-ICDKF comparing to veDYNA at double lane change test with road friction coefficient μ = 0.3: (a) yaw rate, (b) sideslip angle, and (c) longitudinal velocity.
Performance indexes of EKF at double-change test and μ = 0.85.

EKF: extended Kalman filter; MAE: mean absolute error; RMSE: root mean square error; PAE: peak of absolute error.
Performance indexes of ST-ICDKF at double-change test and μ = 0.85.

ST-ICDKF: strong tracking-iterative central difference Kalman filter; MAE: mean absolute error; RMSE: root mean square error; PAE: peak of absolute error.
Performance indexes of EKF at double-change test and μ = 0.3.

EKF: extended Kalman filter; MAE: mean absolute error; RMSE: root mean square error; PAE: peak of absolute error.
Performance indexes of ST-ICDKF at double-change test and μ = 0.3.
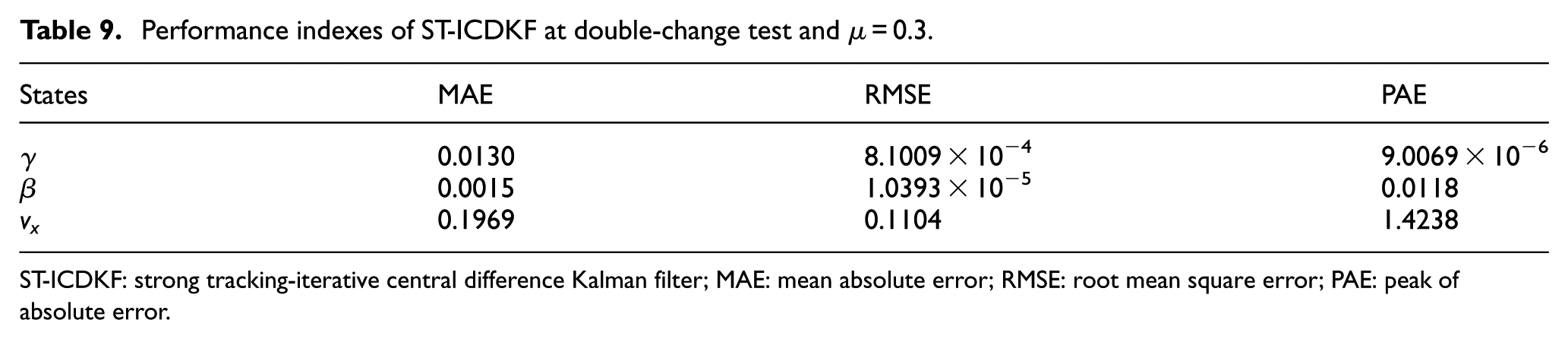
ST-ICDKF: strong tracking-iterative central difference Kalman filter; MAE: mean absolute error; RMSE: root mean square error; PAE: peak of absolute error.
It can be known from performance indexes that ST-ICDKF has a higher accuracy and tracking capability comparing to EKF, with most of performance indexes more optimized. More specifically, although sideslip angle estimated by ST-ICDKF and EKF are very close on two different roads, ST-ICDKF has smaller performance indexes of yaw rate and longitudinal velocity than EKF. It is worth noting that for each state, magnitude relationship is β < γ <vx. Therefore, it is easy to know from Tables 6–9, the value of each state should also follow β < γ <vx. In addition, for road with higher road friction coefficient, performance indexes are smaller than those of lower road friction coefficient. Thus, it can be obtained by analyzing Tables 8 and 9 that for vx, maximum MAE of ST-ICDKF is 19.69%, which is much better than 51.99% of EKF. RMSE and PAE of ST-ICDKF are 11.04% and 1.4238 km/h, respectively, and better than the value of 44.73% and 3.7613 km/h of EKF. On the other hand, as shown in Figures 6 and 7, ST-ICDKF provides a better tracking capability than EKF. In general, it is proved that the proposed observer provides higher accuracy and stronger robustness than EKF in double-change test.
Conclusion
This research proposed a ST-ICDKF algorithm for observation of DDEV states. First, vehicle dynamics model with 3 degrees of freedom was developed as nominal model of the proposed observer. Then, a strong robust observer of DDEV states based on proposed ST-ICDKF was designed. The proposed observer based on STF algorithm frame realized a strong tracking capability when nominal model is uncertain and robustness of the observer is improved by introducing a time-varying fade factor. At the same time, central difference transformation improves calculation efficiency and estimation accuracy because it approaches posterior mean and posterior co-variance of nonlinear systems and avoids high-order truncation comparing to first-order Taylor expansion of EKF. On the other hand, combination of states updating and Gauss–Newton iteration was introduced to correct variance and co-variance; therefore, the proposed observer also achieves higher estimation accuracy and convergence rate comparing to EKF. Moreover, this research completed modeling of DDEV in simulator veDYNA environment. Finally, the proposed observer has been verified by simulation in veDYNA at two different maneuvers with high and low road friction coefficients tests. For both of tests, the proposed observer provides higher estimation accuracy and stronger tracking capability comparing to EKF significantly with maximum PAE, RMSE, and PAE less than 34.23%, 25.22%, and 1.4238 km/h, respectively. In this research, only steering wheel angle, longitudinal acceleration, and lateral acceleration are needed to be measured directly, which are easily obtained from low-cost sensors like angle sensor and accelerometer, respectively. Therefore, it can be concluded that the proposed observer meets the requirements of vehicle stability control systems excellently.
Footnotes
Handling Editor: Zhixiong Li
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work is financially supported by Six Talent Peaks Project Fund of Jiangsu Province (no. 2015-XNYQC-002), the National Natural Science Fund (no. 51675235 and no. U1564201), the Primary Research & Development Plan of Jiangsu Province (no. BE2017129), and Jiangsu University Senior Talent Fund (15JDG075).