
Abstract
In order to evaluate the influence of unsprung mass on ride comfort for an in-wheel motor electric vehicle, an improved genetic algorithm based on fitness evaluation was proposed to optimize the suspension system. The simulation model was established in ADAMS software for the target sports utility vehicle with front McPherson and rear unequal length double arm suspension systems. The ride comfort of the target vehicle was analyzed by the developed simulation model. The stiffness and damping of the suspensions were optimized by the root mean square values of the vehicle weighted vertical acceleration and the pitching angle acceleration with the help of the multi-disciplinary and multi-objective optimization software, ISIGHT. The results show that, the proposed multi-objective optimization algorithm is helpful to achieve the ride comfort improvement and the computation time reduction.
Keywords
Introduction
Recently, more and more people are concentrated on electric vehicles driven by in-wheel motor. It is able to achieve the four-wheel independent control and has a good dynamic control function. However, the introduction of hub motors will increase the unsprung mass, and worsen the ride comfort and handling stability of the electric vehicle. Optimization of the parameters of the suspension system of the vehicle is thought of as a good method. Based on an improved genetic algorithm, the vehicle roll angle, yaw rate, and vehicle vibration acceleration were used as the optimization objectives; the suspension system of a light-duty bus was optimized which improved the ride comfort and handling stability performance, respectively. 1 Linear vibration model of 1/4 vehicle was established in Ma et al.; 2 the sum of root mean square (RMS) value of the acceleration of vehicle body, suspension dynamic deflection, and wheel dynamic load was looked as the optimized target to optimize the suspension configuration by using pattern search function and improved the ride comfort. A vehicle was modeled using four-degree-of-freedom (4DOF) system and an improved genetic algorithm was proposed to optimize the parameters of the suspension, which aimed to decrease the tire dynamic load to ground and reduce pavement damage. 3 A half car model was used in Shafiqur Rahman and Kibria 4 to investigate the dynamic response, that is, the vibration isolation and ride characteristics of both heavy-duty and light-duty vehicle suspension systems. Based on ADAMS/Car Ride, two vehicle simulation models were established, respectively, in Jiang and Pan 5 with the double wishbone and McPherson independent suspension as the front suspensions, and the vehicle ride comfort simulation analysis was carried out with random road profile input. A multi-body dynamic rigid–flexible coupling model of an in-wheel motor vehicle is built in Chen et al., 6 and the algorithm of NSGA-II was used to optimize the suspension parameters to improve the ride comfort while the RMS of weighted acceleration, wheel dynamic load, and suspension dynamic deflection were regarded as evaluation indices. A nonlinear tracking control strategy with extended state observer (ESO) which is used to estimate the augmented state of the system is presented in Pan et al. 7 for vehicle active suspensions to improve the ride comfort, where suspension spaces and dynamic tire loads are considered as time-domain constraints to be guaranteed. A heavy tractor vehicle model with cab suspension and air suspension was established in Zhao et al.; 8 parameters of suspensions were chosen as variables that identified as optimization parameters based on the ideal parameter modification method which improved the ride comfort and the handling stability.
Therefore, the current research on the ride comfort of in-wheel motor electric vehicles focuses on the installation mode of the in-wheel motor, structural analysis, and parameters setting of the suspension, vibration model selection, optimization algorithm, and so on. For optimization method, there are some differences between suspension systems and general mathematical problems. Researchers must create an accurate simulation model to do interactive computation with the algorithm to achieve optimization purposes because the fitness function of suspension cannot be expressed by explicit formula mathematically.
This article presents a multi-dynamics model of the in-wheel motor electric vehicle with random road profile input. In this model, an improved genetic algorithm based on fitness evaluation is implemented to search for the optimal parameters of the vehicle suspensions to reduce human vibration and to achieve the best comfort of the passengers.
Vehicle model
Multi-rigid body dynamics equation
Generally, the Euler angle and Cartesian coordinates are regarded as the generalized coordinates to determine the position of a rigid object in the multi-rigid body dynamics, and given as

The total kinetic energy of a rigid body is composed of translational energy



where
Moreover, the generalized momentum associated with generalized coordinates is defined as



In fact, the dynamics equation and the kinematics equation of rigid body are clearly different from each other, the former expresses the relationship between the force and acceleration, but the latter presents the position and velocity of the components. Therefore, the Lagrange’s equation of motion of a mechanical system model and other six Lagrange’s equations with a multiplier of generalized coordinates as well as the constraint equation of the dynamic system are showed in equations (7) and (8)


where

Hence,

where

Dynamics simulation model of vehicle
In the process of modeling, the overall quality of the vehicle was simplified as a ball, its position is the geometric coordinate of the centroid of the vehicle at resting. In ADAMS/Car, the vehicle simulation model includes front and rear suspensions, steering system, the body, stabilizer bars, and tires subsystems, and two in-wheel motors were used for front-wheel drive (Figure 1). Table 1 lists all parameters of the reference vehicle and two in-wheel motors.

Car ride comfort simulation model.
Parameters for the reference vehicle and motors.

Genetic algorithm based on fitness evaluation
Algorithm description
For traditional multi-objective optimization algorithm, a necessary population size must be kept to maintain diversity to avoid falling into local optimum. But for suspension system, random road profile, dynamics simulation model of system, and optimization calculation model are needed for interactive callings of the algorithm to obtain the fitness function value of each individual. In view of the current ordinary PC, the fitness calculation of an individual ranges from a few seconds to a few hours, it will take much time if the process has more than 100 populations and more than 50 evolutionary algebras.
Thus, an improved algorithm is proposed on the basis of the standard genetic algorithm, which divides the individual fitness evaluation process into two steps. First step, the population is clustered and the individuals are divided into subcategories of

Clustering method
Clustering is the process of grouping the samples with similarities into the same group. There are three conventional clustering methods—hierarchical clustering, partition clustering, and overlapping clustering. Partition clustering method was adopted to measure the similarity between individuals, and a set of classes was established to keep the maximum similarity of samples in each class. The distance, dij, between samples, Xi and Xj, was regarded as the similarity evaluation measure. In the formula, k is the sample attribute and p is total number of it

where, m = 1 indicates City Block; m = 2, Euclidean Distance; and m = 3, Minkowski Space.
Fitness evaluation
K-means algorithm, a relatively simple algorithm that belongs to partition clustering, is employed to set the value of the number of clusters as 10. For unrepresentative individuals in the same class, the total fitness can be computed in diverse ways if the fitness value of representative individuals is known. The distance from the fitness function value of each representative individual to every representative individual has a fixed proportion, and given as

In the above formula,
Optimization of suspension systems
In ADAMS, the vehicle model is completed by using the hard points in a symmetrical way to reduce the amount of data and simplify the process. Therefore, only 1/2 vehicle Simulink model and the M-file for the simulation were created. An improved genetic algorithm was used to optimize the objectives. The optimum variables are written as below

The objective function is

where
The dynamic deflection constraints of suspensions
To prevent suspensions from striking the buffer blocks and keep riding comfortability when driving on uneven roads, dynamic deflection of suspensions should have sufficient space.
9,10
For off-road vehicle, its allowable deflection is
Hence,
The relative dynamic load constraints of tires
The relative dynamic load,


where
Original frequency
To meet the requirements of ride comfort, the full-load original frequency of the front and rear suspensions are designed as


In all constraint equations above,
Vehicle simulation
Input profile excitations
A random road generator that depends on the Sayers digital module is provided in ADAMS/Car Ride. 11,12 It is a type of mathematical experience model that is integrated with multitudinous types of road measurement parameters. The PSD parameters of road have been shown in Table 2 and the generated visual road profile at B level can be seen in Figure 2.
Parameters of road roughness in Sayers.


Pavement profile at the B level.
Besides, the power spectrum density of road can be written as

where,
Multi-objective optimization
In fact, it is not an easy thing to set the values of the optimizing parameters. The number of the clusters and population size of the algorithm will largely decide the optimization speed and the result. It should be comprehensively considered.6,13,14 During the optimization, the command script, input, and output files as well as the simulation model have been imported together into ISIGHT to complete the integration. 15 Figure 3 is the flowchart of the experiment design in ISIGHT, which expresses the integrated blocks in the optimization process. Figure 4 shows the relationship between the design variables and the objectives. For the multi-objective genetic algorithm based on fitness evaluation, the number of clusters was 10, the population size was 100, the number of generations was 50, and the crossover probability and mutation rate were determined as 0.9 and 0.2, respectively. For optimization results, the RMS value of the vertical weighted acceleration and pitching angle of the simulation model can be seen in Figure 5, which presents the distribution of the objective function points in a form of three-dimensional coverage diagram. Figure 6 shows the three-dimensional scatter plots of sprung stiffness and damping of the optimization process, all the selected values, and the optimum parameters for suspensions can be obtained from the map as well.

Integration and optimization diagram.

Optimization correlations.

Distribution of the objective functions (3D).

Scatter plots of variables (3D).
With the help of the multi-disciplinary and multi-objective optimization software, group values of stiffness and damping satisfying the constraint requirements have been obtained, as shown in Table 3. Then, the optimum stiffness and damping are reset in ADAMS/Car Ride for further ride comfort simulation analysis.
Optimization results of suspension systems.

Vehicle ride comfort analysis
The random road profile is the only input of the wheels which has a significant effect on the vehicle vibration; 16 then, the standard basic evaluation method ISO 2631-1:1997 was applied to evaluate the ride comfort, 5 which stipulates that the human’s reaction to the vibration comfort must be evaluated by the RMS values of the weighted acceleration when the peak coefficient of vibration wave is less than 9.
Original ride comfort analysis
According to the vehicle ride comfort test method,
9
the vehicle simulation was completed under the random road input while the velocity was 40, 50, 60, 70, 80, 90, 100 km/h, respectively. With the support of ADAMS Post-processing function, the time history, the PSD, and the weighted RMS of the accelerations in three axial have been computed. Look at the original computation of the RMS value of the weighted vertical acceleration at 70 km/h (before optimization), it is able to obtain
Ride comfort analysis after optimization
All the optimized stiffness and damping were substituted into the suspension system’s further simulation. The optimized RMS values of the total weighted acceleration of the vehicle were obtained after simulation. Figure 7 shows the original and optimum PSD curves in the three axial and the vertical RMS value curves of accelerations at the speed of 70 km/h, and compared and analyzed below.

The PSD and the weighted RMS of the accelerations in three axials.
Figure 8 depicts the PSD of pitching angle acceleration before and after optimization.

The PSD of pitching angle acceleration curves.
It can be observed from the simulation results in Figure 7 that the vibration trend of the optimized PSD of vehicle acceleration in the lateral, longitudinal, and vertical directions are, respectively, similar to those before optimization. In the meanwhile, the frequency to each vibration peak is almost the same in either direction whether before or after optimization, but the peak at each optimized curve decreased significantly than the initial one and is the same as the PSD of pitching angle acceleration in Figure 8. Compared with the initial RMS values of vehicle vertical weighted acceleration, the optimum values at all frequencies were obviously reduced, and detailed optimization results are shown in Table 4.
Ride comfort simulation results before and after optimization.
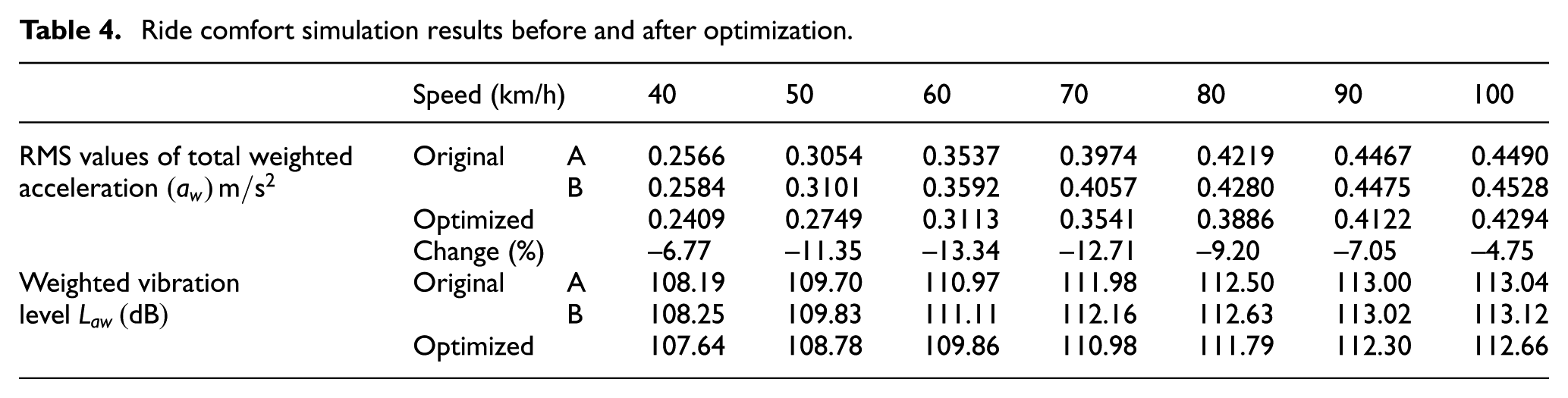
Presented in Table 4 are the calculation results for the optimization. It can be seen that objectives in original B have slightly increased than those in original A after the installation of in-wheel motors when the simulation is at different speeds, so the mass of motors affects the targets. But compared to the data in original B, the results in lesser RMS values of the optimization have been reduced between 10% and 15% when the speed ranges from 50 to 70 km/h, other reduction is less than 10% when the speed is 40, 80, and 90 km/h, and the objectives were cut down below 5% when the speed is 100 km/h. Besides, the weighted vibration level at each speed after optimizing was lower than before, which means corresponding subjective feeling of human body would become better. On the whole, the addition of the in-wheel motors has little effect on automobile ride comfort with the help of suspension system parameter optimization.
Rapidity analysis of algorithms
Figure 9 is the scatter-grams of the standard and improved genetic algorithms, which describes the optimization process of the objective functions under the same optimal conditions when the interactive computation time started from 0 to 3 h, the population size was 100, and the number of subgenerations was 50. The x-coordinate of a point is the pitching angle acceleration of the individual, and the y-coordinate is the vertical weighted acceleration of the individual. The individuals with lesser x-coordinate or y-coordinate values were looked on as good solutions for suspension system. Thus, we can compare the performances of the two algorithms by the scatter-gram. In the same time interval, if the average values of the x-coordinate and y-coordinate of the individuals derived by algorithm A are lesser than those of algorithm B, we say that algorithm A has the faster convergence rate than algorithm B.
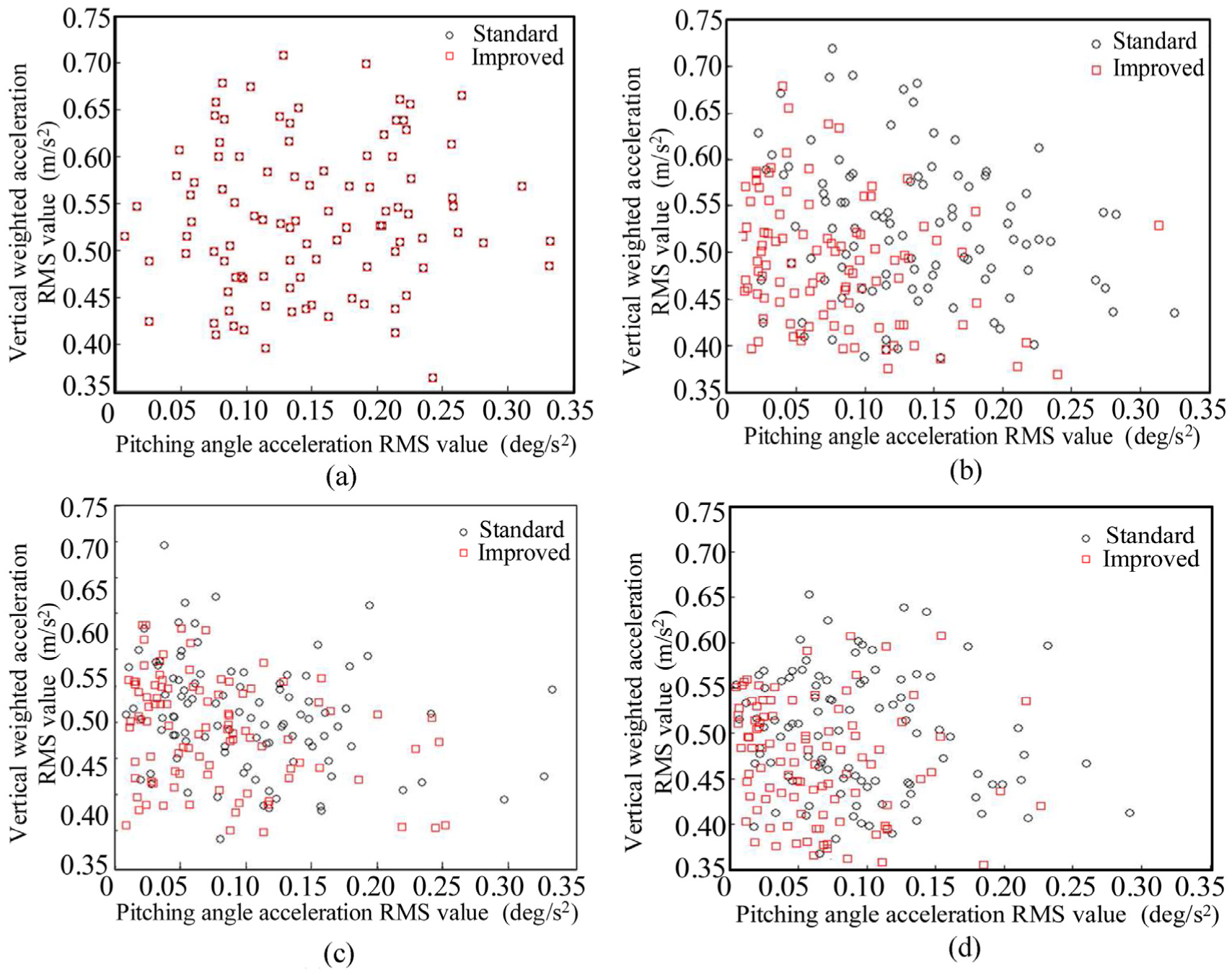
Distribution of the objective functions of the two algorithms at different computing time: (a) t = 0, (b) t = 1, (c) t = 2, and (d) t = 3.
It can be shown from Figure 9 that the proposed genetic algorithm and the standard algorithm have the same random distribution of the first generation population when the calculating time was 0 h in Figure 9(a). Moreover, under the same computing time that from 1 to 3 h in Figure 9(b)–(d), the proposed improved genetic algorithm in this study has a better scatter distribution of the two objectives, better astringency of computation, and higher computational efficiency than the standard genetic algorithm, and the total time consumption in the calculating process has been decreased obviously as well, which shows the improved genetic algorithm is superior to the standard one and has a faster speed for optimization of suspension systems.
Conclusion
This article developed an in-wheel electric vehicle dynamic simulation model, by using the multi-objective genetic algorithm based on fitness evaluation, stiffness, and damping of suspension systems of the reference vehicle that have been optimized effectively. Under identical conditions, the proposed algorithm optimized more rapidly and has higher computation efficiency than the standard genetic algorithm on the basis of ensuring the calculation accuracy of the optimization. The simulation results show that the initial vibration accelerations of the vehicle do not differ much from those of the in-wheel motor electric vehicle, which says the addition of the in-wheel motor has little influence on ride quality. Moreover, the vehicle ride comfort after optimization has been improved, which is given to illustrate the effectiveness of the proposed optimization method and provides a new idea for further study of suspension optimization.
Footnotes
Acknowledgements
The authors are thankful to the anonymous referees for their invaluable suggestion to improve the article and the Collaborative Innovation Center of Electric Vehicles in Beijing for providing the necessary facilities.
Handling Editor: Crinela Pislaru
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was sponsored by general project of Beijing Municipal Education Commission, the State Key Laboratory of Automotive Safety and Energy under Project No.KF16032, and National Natural Science Foundation of China under Contract No. 51275053.