
Abstract
This article investigates the effect of distance-dependent noise on optimal transponder distance in a moving long baseline positioning system. First, according to the positioning model of the moving long baseline positioning system, the relationship between measurement noises and positioning error is established. Second, a cost function is proposed to evaluate the positioning performance. Then, based on the optimal formation, the optimal distance is deduced. Finally, the relationship between the optimal distance and the parameter for the distance-dependent error is proposed. By using this relationship, the effect of distance-dependent measurement noise on optimal distance is analyzed. Simulation examples illustrate the results.
Keywords
Introduction
As energy and robotic technologies developed, autonomous underwater vehicle (AUV) is widely used in both military and civilian fields. It plays an important role in submarine topography detection, mine-hunting, target or animal tracking, disaster response, and oceanographic surveys.1–3 The location information of AUV plays a very important role in these missions. However, as the electromagnetic waves decay rapidly in water, the popular Global Positioning System (GPS) cannot be used locate the AUV.4–6 The research of the positioning technology is of great significance. Acoustic wave, as the only information carrier in water, provides a viable alternative to locate AUV. Many acoustic positioning systems have been proposed in the past.7–9 Among these positioning systems, the long baseline (LBL) positioning system has the highest positioning accuracy, but it has several shortcomings, for example, requiring long time for deployment and calibration, and limited operating region.
Based on LBL, Advanced Concepts and Systems Architecture (ACSA) company developed a GPS intelligent buoy (GIB) positioning system. In GIB, the transponders on the sea floor are replaced by the GPS buoys. 10 Compared to traditional LBL, GIB has the following advantages: the buoys are on the water surface, which requires less time for deployment, calibration, and recovery. In order to locate AUV in a large-scale region, moving long baseline (MLBL) positioning system is brought up. 11 MLBL is a generalization of LBL by replacing the pre-calibrated arrays of static transponders with mobile buoys.12,13 In MLBL, the mobile buoys are equipped with GPS receiver, and they can get the position information of themselves. According to the position information of mobile buoys and the distance measurements between AUV and mobile buoy, the absolute position of AUV is estimated. 14 The MLBL system is shown in Figure 1. As shown in the figure, four unmanned surface vehicles (USVs) are equipped with transponders, GPS, and wireless communications, and AUV is equipped with transponders. By using the acoustic transponders, the distances between AUV and USVs are measured. According to the distance measurements, the position of AUV relative to USVs is obtained. Combining the absolute positions of USVs, the absolute position of AUV is achieved.

MLBL positioning system consists of four USVs.
In the past few years, many range-based positioning algorithms have been proposed, such as least squares, Kalman filter, and maximum likelihood estimation.9,15–20 Through the observability analysis and experiments of MLBL, researchers find that the positioning performance of AUV is closely related to the formation of mobile buoys. Hence, a large amount of work has been done on the optimal formation of mobile buoys. Based on the Cramér–Rao low bound (CRLB) and Fisher information matrix (FIM), the cost function is established to metric the positioning performance of AUV. By minimizing CRLB or maximizing FIM, the optimal formation of mobile buoys is deduced.21–25
In these cost functions, the distance measurement noises between AUV and mobile buoys are considered. However, the influence of the position noises of mobile buoys is ignored. In MLBL, the absolute position of AUV is calculated by using the positions of mobile buoys and the distances between AUV and mobile buoys. Hence, the position measurement noises of mobile buoys and the distance measurement noises between AUV and mobile buoys have an immediate impact on the positioning performance.2,26–28 Considering the distance measurement errors and the position errors of mobile buoys, we propose a cost function to evaluate the positioning performance of AUV.
In previous works, the distance measurement noise between AUV and mobile buoy is assumed to be white Gaussian noise. In this case, the positioning performance is irrelevant to the distances between mobile buoys and AUV. It does not meet the actual situation. Hence, we establish a distance-dependent measurement noise. According to this, we analyze the relationship between the positioning performance and the distance measurement noise. The main contribution of this article is threefold: (1) considering both distance measurement error and position error, the cost function is established; (2) based on the distance-dependent measurement noise, the optimal distance is calculated; (3) the effect of distance measurement noise on optimal distance and positioning performance is analyzed.
The remainder of the article is organized as follows. The positioning model of MLBL is presented in section “Positioning model.” In section “Cost function,” the positioning error of AUV is analyzed, and the cost function is proposed with distance and position noises taken into account. Based on the optimal formation of mobile buoys, the relationship between optimal distance and the parameter of distance measurement noise is presented in section “Optimal distance.” The sensitivity of optimal distance to changes in distance-dependent measurement noise is analyzed in section “Effect of distance measurement noise.” Illustrative simulations results are presented in section “Simulations,” followed by a short section “Conclusion” of concluding remarks. The proofs of several technical results are reported in Appendix 1.
Positioning model
Consider an earth fixed reference frame

Similarly, define

where

where





Cost function
Positioning error
As shown in the positioning model, the position of AUV is determined by the distance measurements and the position measurements of mobile buoys. Assuming these measurements contain noises, the differential form of equation (3) with respect to

where






Then, the positioning error of AUV is described as

Cost function in optimal formation
In subsection “Positioning error,” we get the positioning error of AUV. In this section, a variance analysis method is proposed to analyze the positioning error.
In equation (16), the expressions for positioning error

where
In MLBL, the distance between mobile buoy and AUV is measured by acoustic transponders. Generally, the distance measurement noise is modeled as a Gaussian white noise. However, this assumption is contrary to realism. In practice, the distance measurement error increases with the distance. To better capture the physical reality, we assumed that the distance measurement noise is distance-dependent. The noise model of distance measurement

where
Based on the the properties of matrix trace, that is, the trace of a matrix is equal to the sum of the diagonal elements, we get

In previous works, the optimal formation of mobile buoys is derived. The optimal formation is that the mobile buoys are on the vertices of a regular polygon centered at AUV. The optimal formation of four and five mobile buoys in two dimension (2D) are shown in Figure 2. As shown in Figure 2, the projection of AUV on the water surface is in the center of a regular polygon, and the mobile buoys are on the vertices of this regular polygon.

Optimal formation of MLBL in 2D: (a) consists of four mobile buoys and (b) consists of five mobile buoys.
Assuming the mobile buoys are in optimal formation, we have

In the optimal formation, mobile buoys are on the vertices of the regular polygon. Define

It follows that

Combining equations (17), (21), and (23), the cost function in optimal formation is proposed

Optimal distance
In subsection “Cost function in optimal formation,” the cost function in optimal formation is proposed. As shown in equation (24), the positioning performance is related to the number of mobile buoys m, the distance between AUV and mobile buoy r, the depth of AUV h, and the parameters of noises
By minimizing the cost function in optimal formation, we can obtain the optimal distance between AUV and the mobile buoy. That is, by minimizing the monotonicity of function

where


Note that

Effect of distance measurement noise
In section “Optimal distance,” we have obtained the optimal distance between AUV and mobile buoys. From equation (28), we know that the optimal distance is related to the depth of AUV h and the parameter of distance measurement noise
By analyzing the monotony characteristics of optimal distance with respect to parameter

then equation (28) is simplified as

According to the definition of
From equation (28), we have

As suggested above, we get the relationship between optimal distance and distance measurement noise. That is, except for a small interval, the optimal distance decreases as the distance measurement noise increases, and it tends toward stability.
Simulations
This section is divided into two parts to illustrate the effectiveness of the optimal distance and the sensitivity of optimal distance to changes in distance-dependent measurement noise. In the following examples, four USVs in optimal formation are used to locate AUV, and AUV is fixed in the position of

where
Effectiveness of optimal distance and cost function
In this subsection, some simulation results are presented to verify the effectiveness of cost function and the validity of optimal distance. The kinematical parameters of USVs are shown in Table 1. Figure 3 shows the trajectories of USVs in horizontal plane, and the distances between USVs and AUV increase with time. “▴,”“■,” and “★” denote the positions of USVs at
The parameters of USVs.

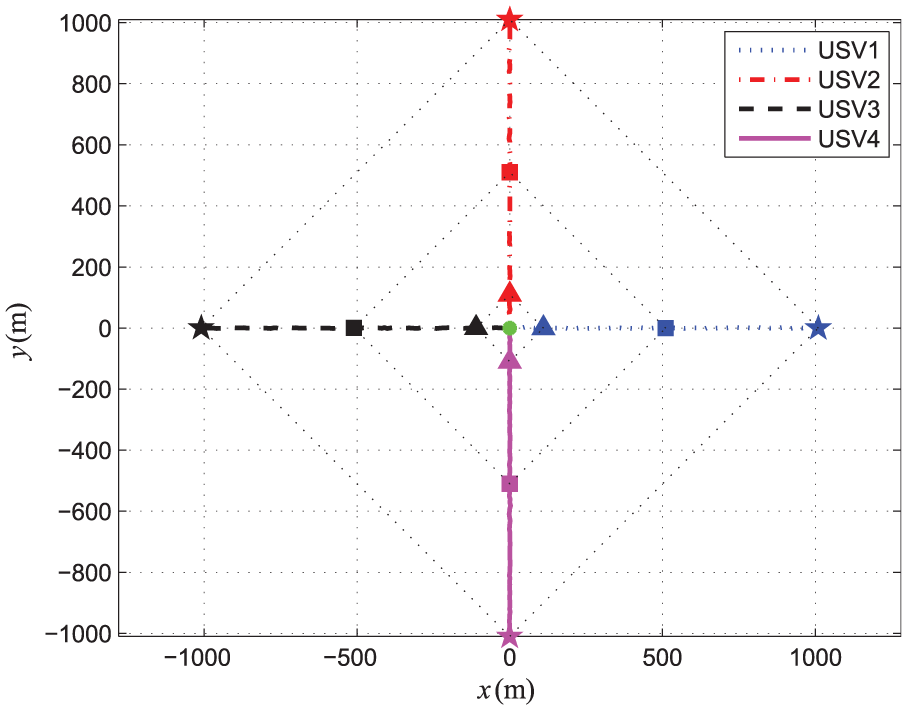
Trajectories of USVs in optimal formation.
To better assess the positioning performance, the mean square error (MSE) of 100 Monte Carlo simulations is applied as the estimation of the positioning error. Figure 4 shows the relationship between distance and positioning error with the parameter

Relationship between distance and positioning error.
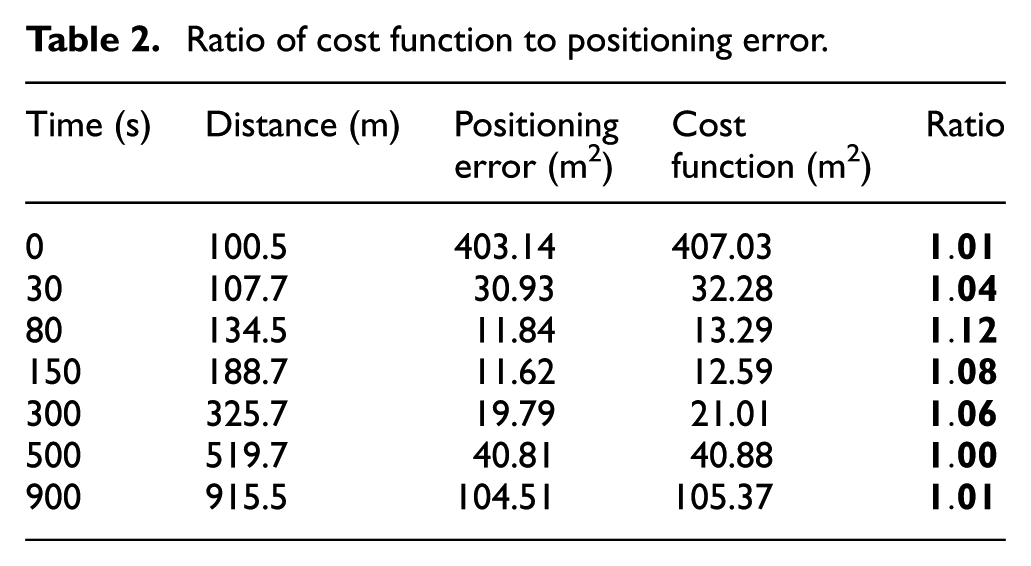
According to equation (24), we get the relationship between cost function and distance, and it is described in Figure 5. Table 2 compares the values of positioning error and cost function in different time, and the ratio of cost function to positioning error is shown in bold. The ratio is slightly larger than 1. As discussed in section “Cost function,” the upper bound of mean variance is designed to estimate the positioning accuracy. Simulation results coincide with the mathematical deduction. It illustrates the effectiveness of the cost function.

Relationship between distance and cost function.
Ratio of cost function to positioning error.
Influence of distance measurement noise
In this subsection, two examples are used to verify the influence of distance measurement noise. One example describes the relationship between optimal distance and distance measurement noise, and the relationship between cost function and distance between AUV and USV in different distance measurement noises is analyzed in the other example.
From equation (28), the optimal distances corresponding to parameter
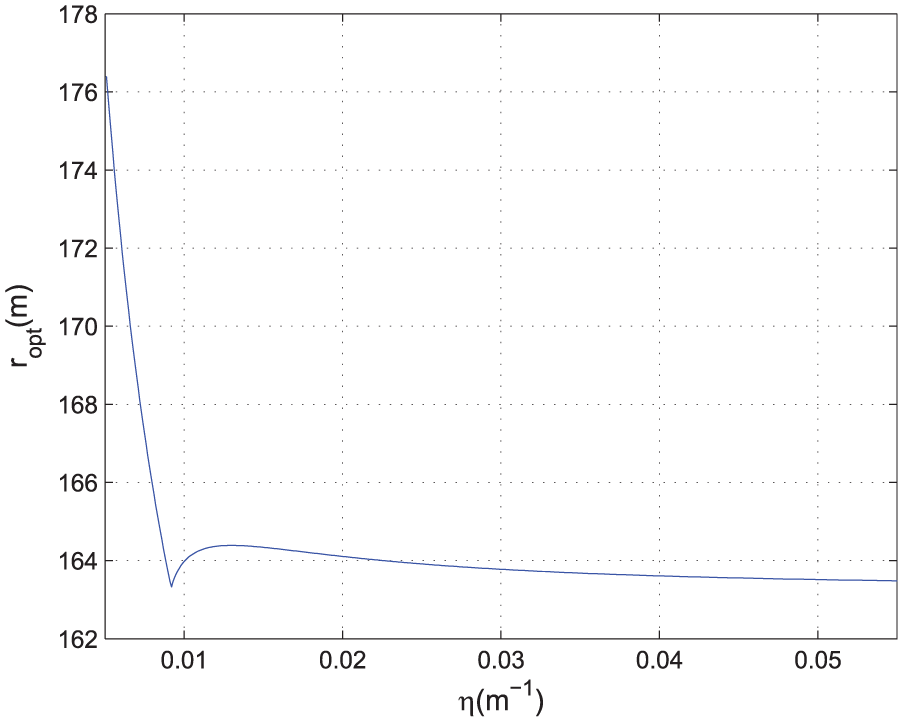
Relationship between optimal distance and distance measurement noise.
In this example, we will analyze the relationship between cost function and distance between AUV and USV in different

Relationship between cost function and distance in different parameters
Optimal distances in different

Conclusion
In this article, we establish a distance-dependent measurement noise. Based on this, the effect of distance measurement noise on optimal distance and position performance is analyzed. First, based on the positioning model of MLBL, the positioning error of AUV is deduced by considering the distance measurement errors and position errors of mobile buoys, and an upper bound of the mean variance is designed to estimate the positioning accuracy. Second, according to the cost function in optimal formation, the relationship between optimal distance and the parameter of distance measurement noise is presented. Then, by analyzing the monotony characteristic of optimal distance, the sensitivity of optimal distance to changes in distance-dependent measurement noise is presented. Simulation results have demonstrated the effectiveness of optimal distance and the influence of distance measurement noise.
Footnotes
Appendix 1
Handling Editor: Shun-Feng Su
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) received no financial support for the research, authorship, and/or publication of this article.