
Abstract
Vehicle suspension system is the key part in vehicle chassis, which has influence on the vehicle ride comfort, handling stability, and security. The extension control, which is not constrained by common control method, could further improve the suspension system performance. The 7 degree-of-freedom suspension model is built. The extension controller is designed according to the function differences. In different extension set domains according to the correlation function, the corresponding control strategy is designed to ensure the suspension system obtains optimal performance in the classical domain and expands the controllable range outside the classical domain as large as possible. By adopting game theory, the domain is optimally divided, and the domain boundary control jump is smoothed by introducing Takagi–Sugeno–Kang fuzzy control into the extension control. Through the simulation and results comparison, it is demonstrated that the extension control could further improve the vehicle ride comfort than the optimal control and the extension control ability can be further promoted through domain game and Takagi–Sugeno–Kang fuzzy control. The analysis of the influence of the extension controller parameter varieties on suspension system performance shows that the error-weighted coefficient and control coefficient have significant effect to the suspension system performance.
Introduction
Vehicle suspension system is one of the key subsystems in the chassis, whose performance has direct influence to the full-vehicle dynamics performance. The vehicle suspension system control was the hot research point in the past. The researchers adopted different control strategy (CS) to improve the system control performance.1–3 Vehicles are a classical complex dynamic system with multi-input, multi-output, coupling, and nonlinearity. The different control methods with their own characteristics can improve the suspension system performance from some aspects such as optimization or robustness. The extension control (EC) is based on a conventional control method and can extend the control ability of the controller, which gets rid of the limitations of conventional control and is not subject to the restriction of the specific conventional control method. It can expand the original control area and divide the global control area, and the corresponding different control strategies are implemented according to the control function differences in different areas, to achieve the control effect which any concrete conventional control method cannot realize. Meanwhile, the EC deals with the control problem from the point of information conversion, and the control input information correlation degree is taken as the basis to determine the control output correction quantity. It can make some vehicle parameters converted to stable controllable area from uncontrollable area so as to expand the vehicle stable work area. Thus, the EC has very broad application in the vehicle dynamics and its stability control. Whereas, currently, the research on the EC to vehicle dynamics has few literatures to report. 4
Extension theory is proposed by a Chinese scholar—W Cai, which is a novel artificial intelligent control technology, deals with the contradictory problem, studies the possibility of object extension, and develops new laws and methods.5–8 Currently, the extension theory is successfully applied to different indexes’ evaluation in engineering. YZ Yang et al. 9 established an index system for car supply chain performance evaluation, then the multilayer extension evaluation model based on analytical hierarchy process (AHP) was built, and the comprehensive correlation degree was used as evaluation norm. Y Zhou et al. 10 evaluated the urban community home-care service for the elderly, the feasibility of the service evaluation was analyzed based on extenics, and the comprehensive service evaluation model was established. For the problem of the surrounding rock stability evaluation with many uncertain factors, M Wang et al. 11 proposed a novel model based on the set pair analysis coupled with extenics considering the incompatibility and uncertainty of the evaluation indicators. YB Liu et al. 12 used the business mode innovation of electric vehicle industry as an example, and established a model innovation method for the formal process business by the basic element theory and extension transformation theory.
The EC theory research has preliminary progress, but the application of the extension theory to improve the control system performance has few literatures. XY Wang and J Li 13 from Huadong University of Science and Technology discussed the basic concept, framework, and principle of EC in the 1990s of last century. JY Chen and Wong CC 14 from Taiwan Institute of technology proposed a new extension controller according to the concept of sliding mode control. MD Wang et al. 15 proposed a new EC method based on gray prediction to overcome the shortcoming of the general EC, thereby enhancing the dynamic performance of the control system. B He and XF Zhu 16 from South China University of Technology utilized EC to supplement the adaptive control and establish a new extensive adaptive hybrid control method. L Yang et al. 17 from Guangdong University of Technology proposed the matter element model of EC and preliminary control algorithm.
The basic EC has two problems needed to be solved. The first is the domain division. As we know, by using the EC, the control domain is generally divided into three parts: the classical domain (CD), extensive domain (ED), and non-domain (ND). The problem therein is how to divide the boundaries between two adjacent domains properly to make the suspension system control performance improvement. The domain division will have influence on the range of the corresponding control action, thus to affect the system’s overall control performance. The second problem is to how to combine the control law in each domain. Although the control law in each domain can take action independently so as to make the system control performance promoted further, the control differences in different domains may lead to the control jump especially on or near the boundary between any two domains. This will cause the suspension performance needed to be enhanced through control improvement. The internal control action changes may not be found, but in order to further smooth the control process, some measures should be adopted.
In this article, the vehicle suspension system dynamics model is built first. Then the extension controller structure is designed. The characteristic variables are chosen to constitute extension set, and according to the corresponding function values’ range, the measure modes are divided. The control actions are then adopted in different extension set ranges, and the corresponding control algorithms are separately designed to obtain the suspension system extension controller. In order to solve the problem of domain boundary division, the game theory is utilized to obtain the best overall system performance with the optimized domain boundary division. Next, to improve the EC jump nearby the domain boundaries, the Takagi–Sugeno–Kang (TSK) fuzzy control method is introduced so as to get an overall smooth control action for the suspension system. Finally, the simulation of closed-loop control systems by optimal control (OC), EC, and extension with performance improvement is carried out, the performances are compared to verify the advantage of the EC and its improvement, and the effect of extension controller parameters to suspension system performance is analyzed.
Suspension system modeling
Considering the vehicle body’s vertical, pitch, and roll motion and the vehicle wheels’ vertical motion, the dynamics model of full-vehicle suspension system with 7 degree-of-freedom is built, which is shown in Figure 1.

Full-vehicle suspension system model of 7 degree-of-freedom.
Assuming that the pitch angle

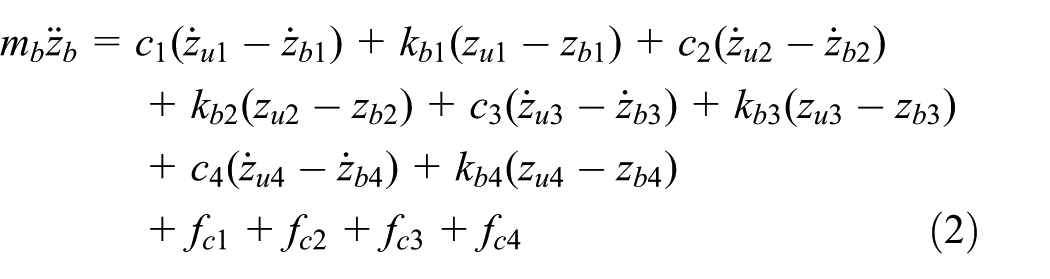
Vertical motion equation of vehicle body mass center is
Pitch motion equation of vehicle body is

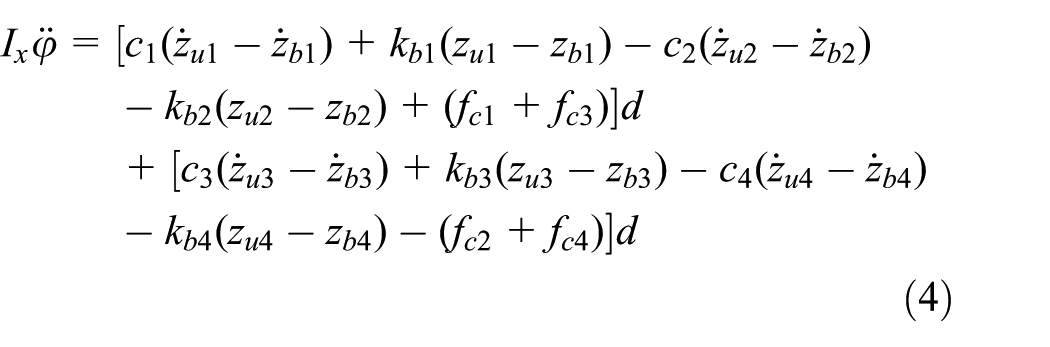
Roll motion equation of vehicle body is
Vertical motion equations of four-wheel mass are




The state vector of the suspension system is selected as
EC of suspension system
In this section, the extension controller structure of suspension system is given first. The extension set is built, which is divided into CD, ED, and ND. On this basis, the control actions are adopted in different extensive set areas according to the correlation function values. The corresponding control algorithms in the CD, ED, and ND are separately designed, so as to obtain the extension controller for vehicle suspension system.
Design of extension controller
A general extension controller structure is shown in Figure 2. The extension controller design process is divided into the five steps: characteristic variable extraction (CVE), correlation degree calculation (CDC), measure mode division (MMD), control reasoning mechanism (CRM), and CS. The characteristic variable refers to the variable which represents the system motion status; the CDC is the corresponding correlation function calculation according to system characteristic variable and characteristic status; MMD is the process of classifying the system status into a certain pattern according to the system characteristic state correlation degree; CRM is the mapping from the fixed system current state measure mode to the proposed corresponding CS, and the reasoning rule is that if <measure mode>, then <control strategy>; and the CS is a variety of adopted, different control methods according to the characteristics of the controlled object. 17

Structure of extension controller.
The error
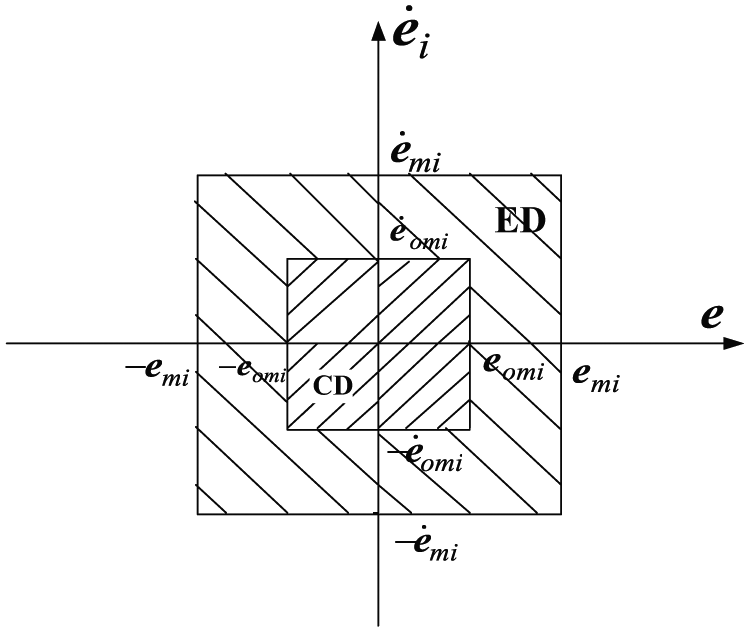
Extension set on the characteristic state.
Assuming the origin point on

The characteristic state correlation function
1. CD: measure mode
The characteristic state
2. ED: measure mode
The characteristic state satisfying
The correlation function
3. ND: measure mode
The characteristic state satisfying
Design of suspension system extension control
Using three different measure modes, the corresponding control algorithms are separately designed according to the vehicle suspension system control function differences. The vehicle suspension system extension controller is then derived so as to improve the suspension system control performance as much as possible.
Measure mode M1
The corresponding characteristic state of measure mode
The suspension system matrix
The system control performance index J is selected as follows

The corresponding matrix form is written as

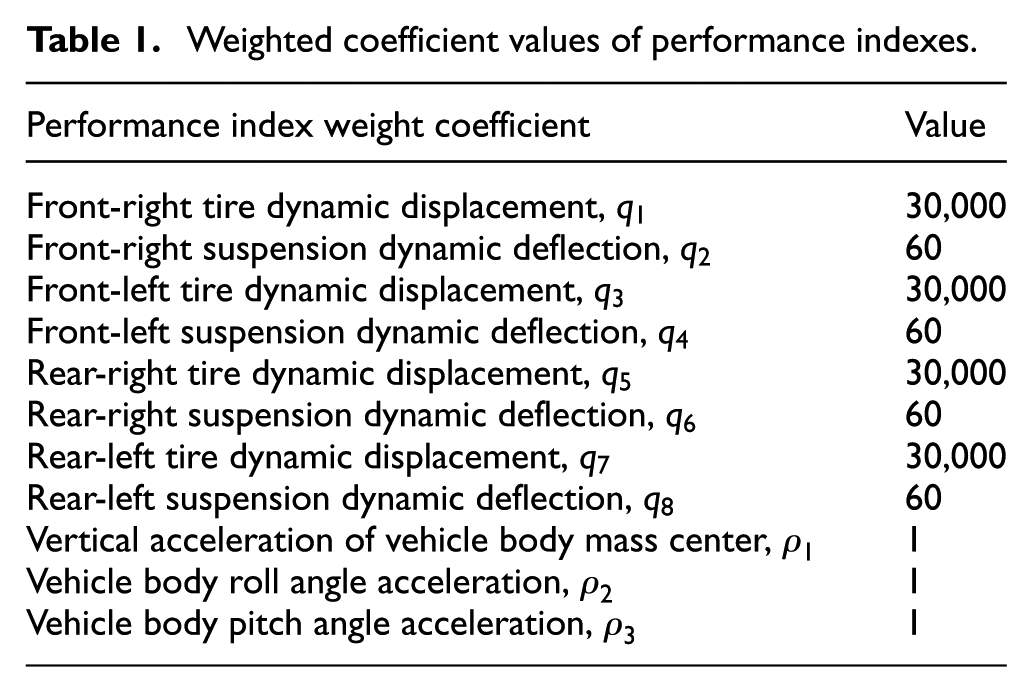
The system variables and model parameters are substituted into the equation (10) to solve the matrices
Weighted coefficient values of performance indexes.
2. Measure mode M2
The measure mode M2 is the main part of the extension control, and the controller output 20 is designed as

where
3. Measure mode M3
The controller output amplitude
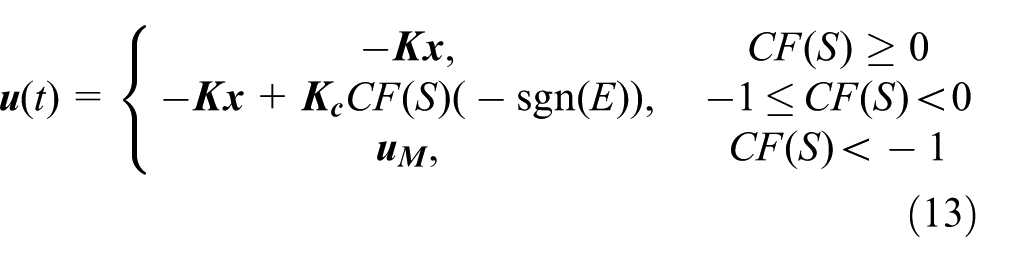
Therefore, the extension controller of vehicle suspension system is summed up as
ED division by game theory
The domain division is one of the key problems in extension control. Once the boundaries of the CD and ED are changed, the correlation function values are changed thereafter. In order to promote the control effect, the proper boundaries division of CD and ED should be considered. In this section, the game theory is utilized to obtain the optimal domains’ boundary division result. The CD and ED are taken as the game objects. The corresponding performance indexes are taken as the gains of both sides. The decision schemes of both sides are determined by the gains. The two-person non-zero sum countermeasure is adopted to construct the gain matrix, to get the Nash equilibrium solution as the balanced points of the CD and ED. By the error between the actual performance indexes and equilibrium points, the fuzzy control rules are designed to modify the domains’ boundaries.
The root-mean-square (RMS) value of the mass-center acceleration, pitch angle acceleration (PAA), and roll angle acceleration (RAA) of the vehicle body are selected to construct the performance index as
The following gain control schemes are constructed.
Converting the ED into CD, which means that the whole characteristic plane contains only the CD and ND. The performance index here is
Converting the CD into ED, which means that the whole characteristic plane contains only ED and ND. The performance index here is
(3) Under guaranteeing the system stability, expand the CD and get a performance index
(4) Under guaranteeing the system stability, narrow the CD and get a performance index
According to the above four schemes, we get the performance indexes of the CDs and EDs under the different varieties. The relation of CD and ED can be reflected through the game between different indexes. Once the two domains are determined, the ND is automatically obtained.
The Nash equilibrium of performance indexes for classical and EDs is solved by Nash maximum–minimum negotiation. 21
The non-zero sum countermeasure gain matrix
The maximum–minimum strategies


The collaboration-type countermeasure gain domain figure is drawn by the gain matrix. The consultation set is determined by the boundary straight line
The relation between
Making
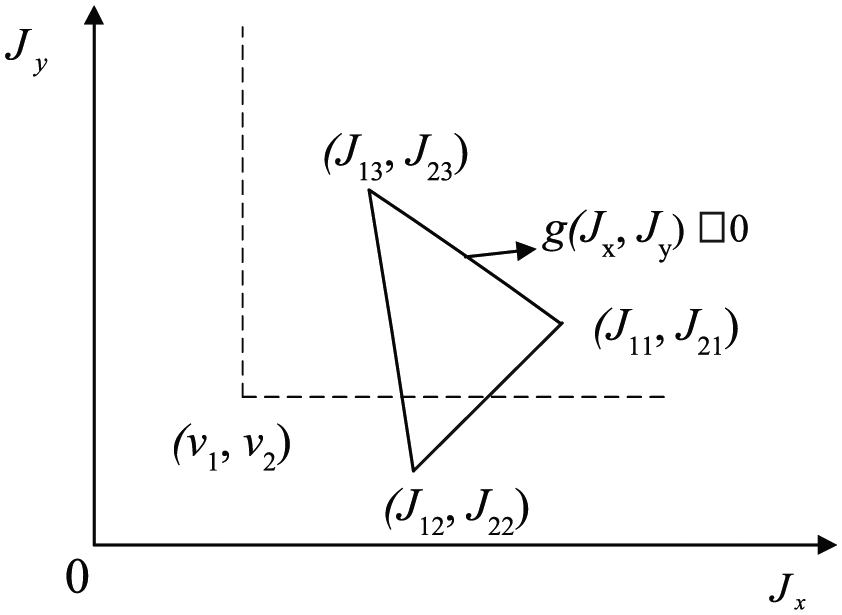
Gain domain figure.
Through the above steps, the Nash equilibrium of the performance indexes can be obtained. The fuzzy control rules are adopted to modify the boundaries of classical and EDs to keep on optimizing the EC performance by dynamical regulation according to the deviation between the optimized performance index and the suspension actual control performance index.
Assuming the actual performance index as J, and defining e1 = J–Jx* and e2 = J–Jy*, where e1, e2 are the inputs of fuzzy controller, whose fuzzy subsets are {NB, NM, NS, ZO, PS, PM, PB}. u1 is the output of CD boundary value, and u2 is the output of ED boundary value, whose fuzzy subsets are {NB, NM, NS, ZO, PS, PM, PB}. The fuzzy controller outputs are written as u1/u2.
The basis of fuzzy control rules is: if e1 is greater than 0, the CD is expanded; if e1 is lesser than 0, the CD is narrowed; if e2 is greater than 0, the ED is narrowed; if e2 is lesser than 0, the ED is expanded. By this rule, the fuzzy rules are set up and shown in the Table 2 to guarantee the CDs and EDs located in the equilibrium states.
Fuzzy rules for domains’ boundaries modification.
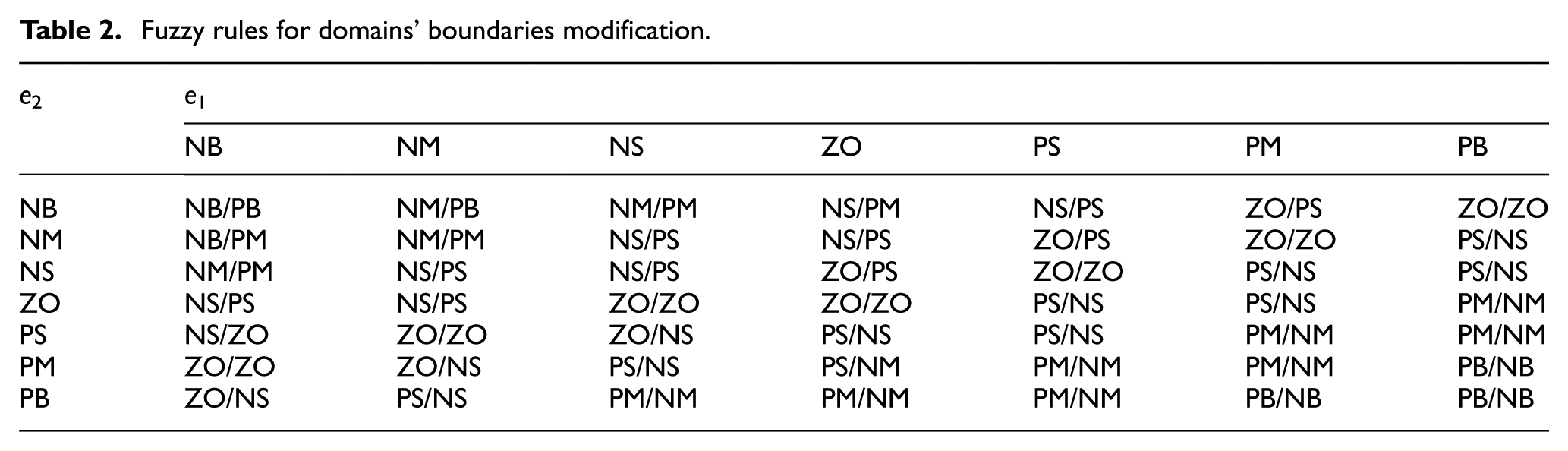
Using fuzzy rules to modify the domain boundaries, the CD and EDs can be determined scientifically, so as to dynamically optimize and improve the extension controller.
EC improvement
After the construction and boundary optimization of the extension controller, we finally get the extension controller shown in equation (13) which is a segmentation function, which means different control actions are adopted in different domains. This has improved the suspension system performance by the domain division and control design. Although the different control actions taken in different domains, the domains are divided clearly by the boundary lines. In each domain, the corresponding control can take action very well. While nearby the boundary, the two different control actions will be met. So which control will be adopted on the boundary line between the CD and ED or between the ED and ND? It can be easily found out that along the domains’ boundaries, a control jump may be produced.
In order to overcome this shortage of extension controller, the TSK fuzzy control is introduced into the extension controller design. The TSK fuzzy control can fuzzify the control action, especially on or nearby the boundaries, so as to make the overall control process smoothness. In this way, the extension controller becomes a tight controller which is not segmented into three parts. The fuzzy membership function for the correlation function is designed by using “gbellmf” in MATLAB fuzzy toolbox shown as follows. Combining the correlation function’s membership function and the equation (13) according to the TSK fuzzy control theory, the control output for any correlation function value can be obtained (Figure 5).

Membership function for the correlation function.
Suspension system simulation and analysis
In this section, the OC and EC are adopted to design the controllers and form closed-loop control systems respectively. The considerable simulations are carried out, and the simulation results are analyzed. Through the experiments, when the
Time-domain response analysis
The vehicle ride comfort performances are compared for the closed-loop control systems by both EC and OC. And the suspension system simulation is carried out, and the time-domain response results are then analyzed.
Figure 6 shows the time-domain response of the mass-center vertical acceleration and PAA of vehicle body, front-left suspension dynamic deflection (FLSDD) and front-right tire dynamic deformation (FRTDD) by the two different control methods under the white noise road input. It demonstrates that the EC could further improve the suspension system control performance to a larger extent than the OC, which means that the vehicle ride comfort is largely improved by the extension control.
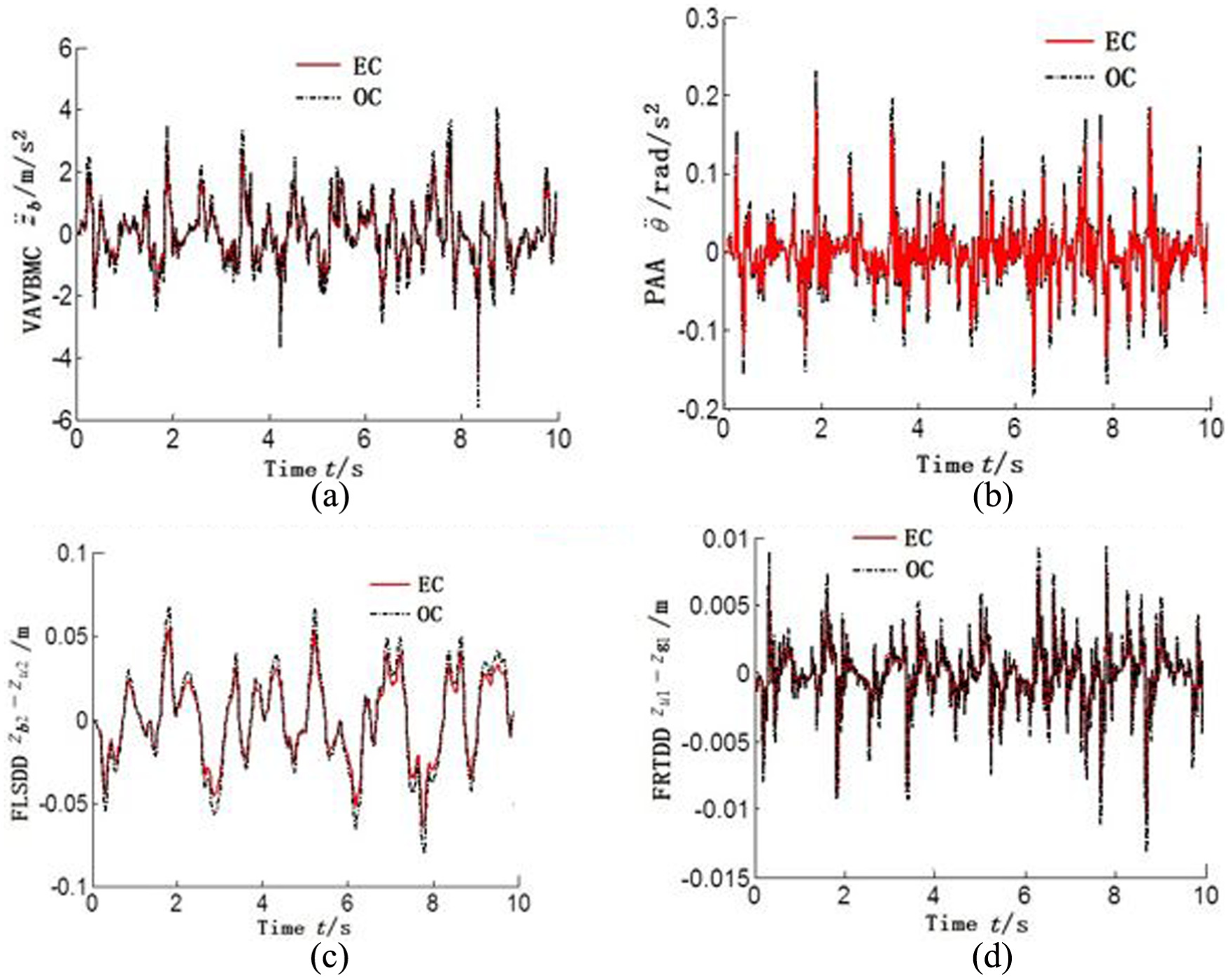
Time responses under white noise road input: (a) vertical acceleration of vehicle body mass center, (b) pitch angle acceleration of vehicle body, (c) front-left suspension dynamic deflection, and (d) front-left tire dynamic deformation.
From Table 3, by adopting extension control, the RMS values of suspension system vertical acceleration of vehicle body mass center (VAVBMC), PAA, and RAA are separately decreased by 9.7%, 18.8%, and 12.0% than by the OC; the front-left and rear-right suspension dynamic deflection RMS values are separately decreased by 9.8% and 10.0% than by the OC; and the front-right and rear-left tire dynamic deformation are separately decreased by 11.5% and 18.2% than by the OC.
Performance indexes comparison of suspension system under white noise road input.

RMS: root-mean-square.
The impulse input is also the typical input to validate the suspension system performance. Figure 7 shows the time-domain response of the VAVBMC RAA and right-front suspension dynamic deflection under the unit impulse road input. It demonstrates that although the OC obtains the optimal suspension performance, the EC effectively extends the control ability which gets the best suspension control performance with minimum peak values and setting time among the three suspension systems. By extension control, the suspension responses under impulse input can best restrain the road disturbance and fastest return to the stable state. Through Table 4, the peak value of VAVBMC with EC is decreased by 26.8% and 30.1%, respectively than with OC and without control; the setting time of VAVBMC with OC has been decreased to half value of that without control, and the setting time with EC is further decreased by 25% than that with OC. All other indexes with OC are much smaller than that without control. With EC, the peak values of PAA, RAA and right-front suspension dynamic deflection are respectively decreased by 40.9%, 5.3%, and 8.7% than that with OC; the setting time are respectively decreased by 15.2%, 37.8%, and 14.3% than that with OC. Therefore, it can be seen that the EC can improve the suspension system performance to a larger extent.

Time response under the unit impulse road input: (a) vertical acceleration of vehicle body mass center, (b) roll angle acceleration of vehicle body, and (c) right-front suspension dynamic deflection.
Performance indexes comparison of suspension system under unit impulse road input.

Therefore, the each performance index of vehicle suspension closed-loop control system by adopting EC has decreased with different degrees. The EC can further improve the suspension system performance through extending the OC ability by dividing the control plane into three domains and design the different corresponding control algorithms in each domain.
Suspension performance comparison by domain game
The proper domain division is significantly important to affect the suspension system performance by extension control. How to obtain the optimal domain boundary is a hard problem in the extension control. In this section, the suspension performance is promoted by the game of the domain values. The time-domain responses are shown in Figure 8 for comparison of domain game. It can found out that through domain game, the suspension controller obtains overall better control performance that is the vertical VAVBMC, PAA of vehicle body and suspension dynamic deflection are all reduced, which demonstrates the effectiveness of domain boundary game. The weighted coefficients in the performance index J are selected as kg1 = 1 and kg2 = kg3 = 0.62.

Time response with and without domain game: (a) vertical acceleration of vehicle body mass center, (b) pitch angle acceleration of vehicle body, and (c) right-front suspension dynamic deflection.
Vehicle ride comfort analysis
Assuming that the vehicle is straightly driving on B-grade road with 20 m/s velocity, the road spectral density function is
According to the international standard ISO2631-1:1997(E), the RMS of vehicle body mass center–weighted vertical acceleration
From the Table 5, it shows the RMS of vehicle body mass center–weighted vertical acceleration, vehicle body–weighted PAA and vehicle body–weighted RAA and the GCI by OC, basic extension control, EC with domain game and EC with domain game and TSK fuzzy control. It can be seen that the indexes of VAVBMC, vehicle body–weighted PAA, and vehicle body–weighted RAA with OC are higher separately by 18.7%, 22.4%, and 18.4% than that with EC. This causes the GCI with OC increases by 18.6% than that with EC. Thus, the basic extension controller could more effectively isolate the vibration caused by the road unevenness, to guarantee the vehicle passengers with better ride comfort. By the EC with domain game, the GCI can be further decreased by 6.0% than that by basic EC. The domain game improves the suspension overall system performance by properly dividing the domains’ boundaries to get better extension controller. Then if the EC with domain game and TSK fuzzy control is adopted, the control ability is extended to the best so that the best suspension system performance is achieved.
Comparison of vehicle ride comfort (RMS).

TSK: Takagi–Sugeno–Kang; GCI: general comfort index.
From the time-domain analysis and vehicle ride comfort analysis, the results demonstrate that the EC really increases control scope in the extension set, and expands the suspension system controllable domain which obtains better control performance and ride comfort than OC. The domain game and TSK fuzzy control further helps promote the controller’s control ability for enhancing the suspension system performance.
Analysis of the influence of extension controller parameters on suspension system performance
The Table 6 shows the RMS of VAVBMC and PAA when increasing the VAVBMC error–weighted coefficient
Influence by deviation weight coefficients to suspension performance.

RMS: root-mean-square; VAVBMC: vertical acceleration of vehicle body mass center; PAA: pitch angle acceleration.
When the error-weighted coefficients are fixed and the each element
Influence by extension controller’s control coefficients to system stable performance.
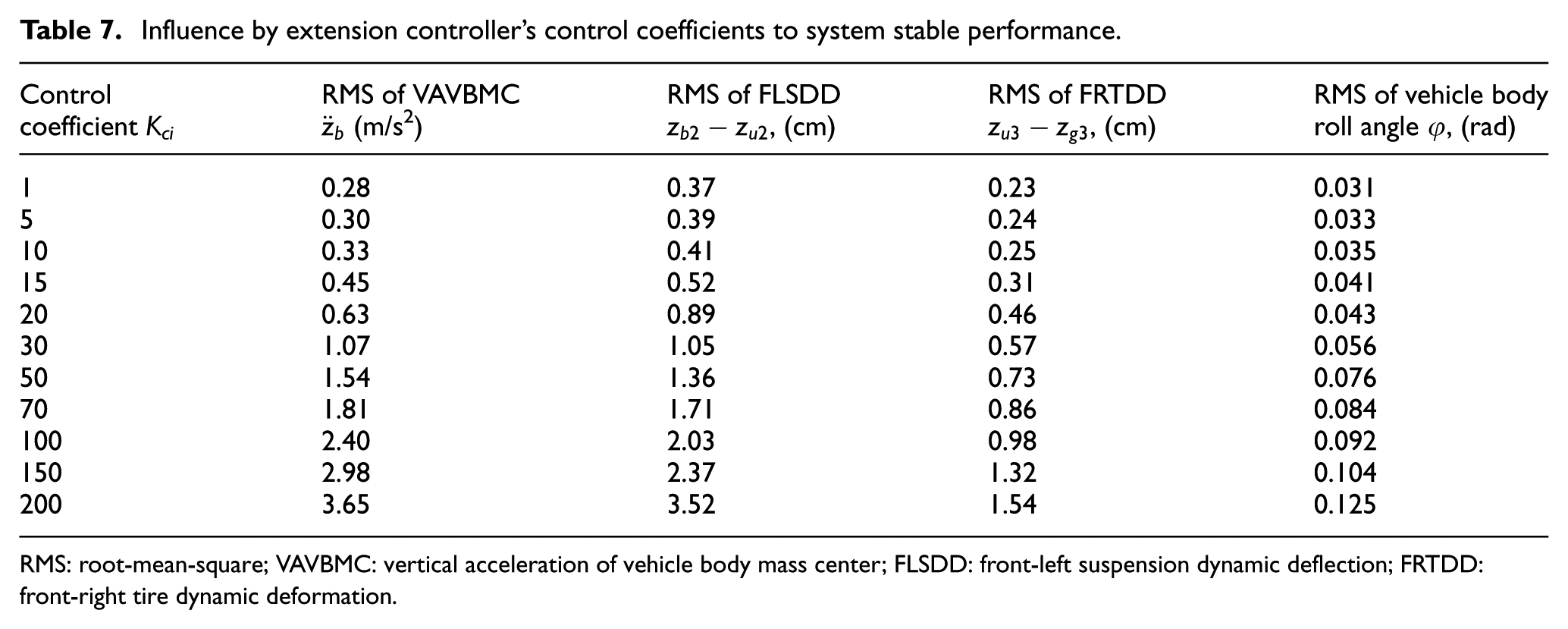
RMS: root-mean-square; VAVBMC: vertical acceleration of vehicle body mass center; FLSDD: front-left suspension dynamic deflection; FRTDD: front-right tire dynamic deformation.
It is demonstrated that the control coefficient of extension controller has a big influence on the suspension system performance or even vehicle stability, and increasing the control coefficient to a certain big value could cause the suspension system performance deteriorate faster.
Conclusion
The model of the state-space equations for vehicle suspension system with 7°degree-of-freedom is built. The extension controller structure is given, and the measure modes are divided according to correlation function. In different extension set ranges, the corresponding CS is designed according to the function differences. And the two problems of domain division and control jump nearby domain boundary have been solved through domain game and adopting TSK fuzzy control. The time-domain simulation for closed-loop suspension system by EC and OC is carried out, and the vehicle ride comfort under four control methods is compared. The research results demonstrate that the EC could further isolate the vibration from the road unevenness to enhance the suspension system comprehensive control performance, and the vehicle ride comfort could be more largely improved by basic extension control. The extension controller can be improved to obtain better suspension performance by domain game and TSK fuzzy control. Furthermore, it is analyzed that the extension controller’s error-weighted efficient and control coefficient have significant effect to suspension system performance or even vehicle stability. Therefore, the appropriately designed EC could effectively expand the controllable range in the extension set so as to make the control actions appropriately applied under the different measure modes.
Footnotes
Appendix 1
Vehicle classical structure parameters:
Handling Editor: Daxu Zhang
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This research was supported under the National Nature Science Foundation of China (grant no.: 51305118), the open fund of Key Laboratory for New Technology Application of Road Conveyance of Jiangsu Province (grant no.: BM20082061504), the China Postdoctoral Science Foundation (grant no.: 2016M602000), and the China Scholarship Council scholarship (grant no.: 201606695041).