
Abstract
Industrial robots consume a considerable amount of energy in the manufacturing industry. As sustainable manufacturing is one of the directions of manufacturing, the energy efficiency of the industrial robots should be considered. The energy consumption model is the key to analyze and improve the energy efficiency of industrial robots. This article focuses on the energy consumption characteristic analysis and energy consumption modeling of the industrial robot. The inertial and friction parameters which are the base of energy consumption modeling need to be identified. Since the torque which is usually used for parameter identification may be unavailable, we propose to use the software-simulated power data to perform the parameter identification and model the energy consumption of the robot. Then, comprehensive simulations are carried out to verify the effectiveness of the proposed method for parameter identification and the energy consumption model. The relation between the speed of the robot and its energy consumption is also analyzed.
Introduction
Sustainable development has been attracting much attention since the United Nations published the Bruntland 1 report Our Common Future in 1987. Energy-efficient manufacturing is an important part of sustainable development. Manufacturing industry is considered as the world’s pillar industry and it consumes a large amount of energy. 2 In the manufacturing industry, industrial robots are playing a more and more important role and consuming a significant amount of energy. Taking automotive sector for example, the electrical energy consumed by robots in the production phase of vehicles is about 8% of total energy consumption in the vehicles’ lifecycle in average. 3 Therefore, it is meaningful to analyze the energy consumption characteristics and model the energy consumption of industrial robots to facilitate energy efficiency optimization.
Recently, many efforts have been made on the energy consumption analysis of industrial robot.3–10 Generally, there are various components of the robotic system that consume energy, such as the controller, the fans for cooling, the motor, and the friction of the robot joint. Mohammed et al. 5 proposed to choose energy-efficient robot configuration to save the energy consumption of industrial robot. Rassolkin et al. 6 and Brossog et al. 10 analyzed the electricity consumption characteristics of industrial robots and compared their energy consumption in different working conditions, for example, tool weights, different trajectories, different workpiece positions, and different velocities. Meike et al. 3 presented a detailed model of energy consumption of industrial robot, including the energy consumption of the converters, the DC bus, the inverters, the motors, and the electromechanical brakes. This model needs a large number of parameters, some of which are confidential and hard to obtain. Pellicciari et al. 8 modeled the energy consumption of industrial robots and calculated the energy-optimal trajectories by means of constant time scaling, with the inertial parameters of the robot being already known. Brossog et al. 9 used the Modelica-based simulation tool to create a digital model of a six-axis industrial robot and used experimental results to improve the model’s accuracy. The effect of robot operating parameters (i.e. payload and speed) on the energy consumption of the robot was also analyzed.
To model the energy consumption of the industrial robot, it is necessary to explore the robot’s dynamics. However, the inertial and friction parameters of industrial robots are confidential and not known to users. Therefore, it is needed to obtain these parameters by parameter identification, which attracts the attention of many researchers.11–21 Swevers et al. 18 and Swevers and Samin 19 proposed a method for parameter identification of robot based on periodic excitation. The joint velocity and acceleration is obtained based on a delicate method and is of high quality. The maximum likelihood estimation is used and simplified to weighted linear least squares estimation because of the high quality of the joint velocity and acceleration. The joint torque is usually needed in the parameter identification of the inertial and friction parameters of industrial robots. Paes et al. 20 used the feedback motor current to identify the inertial and friction parameters of the industrial robot. The technical specifications such as motor torque constants, torque characteristics, transmission ratios, and efficiencies are needed to calculate the joint torques from the current measurements. Some of these technical specifications are unknown and neglected. Christoforou 21 used sensor that measured the base reaction forces/torques to identify the inertial parameters of the robot online and to improve the trajectory tracking controllers.
Although many efforts have been put on the energy consumption modeling and parameter identification, there are some points that need to be explored further. First, the joint torque which is usually used in parameter identification cannot be obtained for some industrial robots, such as ABB robots. The power of the robot can be measured conveniently when there is power sensor (the wiring is simple because only the total power of the robot is needed using the method proposed in this article) or obtained from simulation software (such as RobotStudio developed by ABB). Due to the lack of power sensor, this article proposes a method to use the software-simulated power data of the robot as an alternative for parameter identification. The dynamic model and energy consumption model can then be obtained. Second, there lacks a study to test the effectiveness of the energy consumption model based on the dynamic model of the industrial robot. This article fills in this gap.
Energy consumption characteristic analysis
Energy flow of the industrial robot
The industrial robot usually consumes AC power. The energy flow of an industrial robot is shown in Figure 1. The total power

Energy flow of the industrial robot.
Energy consumption of the motors
The motors nowadays used in industrial robots are generally permanent magnet synchronous motors and of high efficiency (between 83% and 92%). 22 As shown by equation (1), the power losses include the copper loss, the iron loss, the mechanical losses, and the stray losses and can be expressed as

where
As shown in Figure 2, the iron loss and the mechanical loss are nearly constant and independent of the load of the robot. They are determined by the materials, the manufacturing process of the motor, the input voltage, the structure of the motor, and so on. The iron loss is caused by the eddy current and the hysteresis in the stator of the motor. The mechanical losses are caused by the friction of the bearing in the motor and the air friction. The copper loss and the stray loss are dependent on the load of the robot. It is due to the resistance of the stator and the rotor. This power loss is transformed into heat. The stray losses are due to the leakage fluxes through the resistance of the stator winding. 22

Power losses of the motor. 22
Power driving the links
The output power from the motor is used to drive the link of the robot. The diagram of the drive system is shown in Figure 3.

Drive system of the industrial robot.
The torque
where
The power for driving the links can, therefore, be expressed as

where
This article focuses on the modeling of the energy consumption of the motors

where
Energy consumption modeling
Parameter identification based on power data
To calculate

Steps for parameter identification.
Modified Denavit–Hartenberg coordinates
The notation of modified Denavit–Hartenberg (MDH) is shown in Figure 5, where

Modified D-H notation.
This article uses ABB IRB 1200 to demonstrate the proposed method. The coordinates of the ABB IRB 1200 based on MDH method is shown in Figure 6. The MDH parameters of the robot are shown in Table 1.

MDH coordinate frames of ABB IRB 1200.
MDH parameters of ABB IRB 1200.

MDH: modified Denavit–Hartenberg.
Linearization of dynamic model
Equation (2) can be linearized into equation (5) to facilitate the parameter identification 23

where
This article adopts least squares to identify the parameters in

where
Minimum set of inertial parameters
There are 10 inertial parameters
Excitation trajectory
Finite Fourier series are widely used as excitation trajectory for robotic parameter identification, 18 as shown by

where
The excitation trajectory can be optimized to improve the quality of parameter identification. The condition number of the observation matrix

where
Energy consumption modeling based on power data
As the torque may not be available for a portion of industrial robots, the power, which is easier to obtain, is a practical choice. The power of the motor

Combining equation (5) with equation (9), it can be obtained that

where


where
Because
According to equations (10)–(12), the parameters of the robot can be identified as

where
If the power of each motor can all be obtained separately, the unknown parameters of all the links of the robot can be identified by equation (13) at one time. If not, a step-by-step identification can be used, that is, identifying the parameters of the link
Based on equations (10) and (13), the energy consumption model of the motors can be expressed as

In manufacturing tasks, the tool and load of the robot may change according to the process in the tasks. In this article, the tool and load of the robot are considered as a part of link 6. Then, a new parameter identification will be performed. The process of parameter identification and energy consumption modeling are the same with the case where there is no tool or load.
Simulation
Simulation setup
ABB IRB 1200 with 6 degrees of freedom (DOFs) is used to demonstrate parameter identification and energy consumption modeling based on power data. The power can be measured by power sensors or voltage and current sensors. As the simulation software RobotStudio provides the total power of all the motors, we use these data to perform parameter identification for convenience. The accuracy of the power data from RobotStudio affects the accuracy of parameter identification. Currently, we have not evaluated the errors of power data from RobotStudio, but this can be done in the future work. The joint position and the total energy consumption of the motor are also obtained from RobotStudio. The simulation setup is shown in Figure 7.

Simulation setup.
Parameter identification and energy consumption modeling
This article uses step-by-step parameter identification. The parameter identification starts from the last link of the robot and backs to the first link. The results of the former steps are used in the later steps. Therefore, there will be six steps for parameter identification of ABB IRB 1200. At the step of parameter identification of the link
For the excitation trajectory, the base frequency is chosen as 0.1 Hz. Five items in the Fourier series are used. An example of excitation trajectory in step 6 is shown in Figure 8. This is the optimized trajectory according to equation (8). As shown in Figure 9, the robot is commanded to move along the optimal trajectory. The total power of all the motors and the joint position are recorded to perform parameter identification based on equation (13). The data are sampled by 10 Hz. The recorded joint position is fitted by the Fourier series shown in equation (7) to reduce the noise in the data. Then the joint velocity and joint acceleration are calculated by differential operation on the joint position.

Optimized excitation trajectory.

Signal processing in parameter identification.
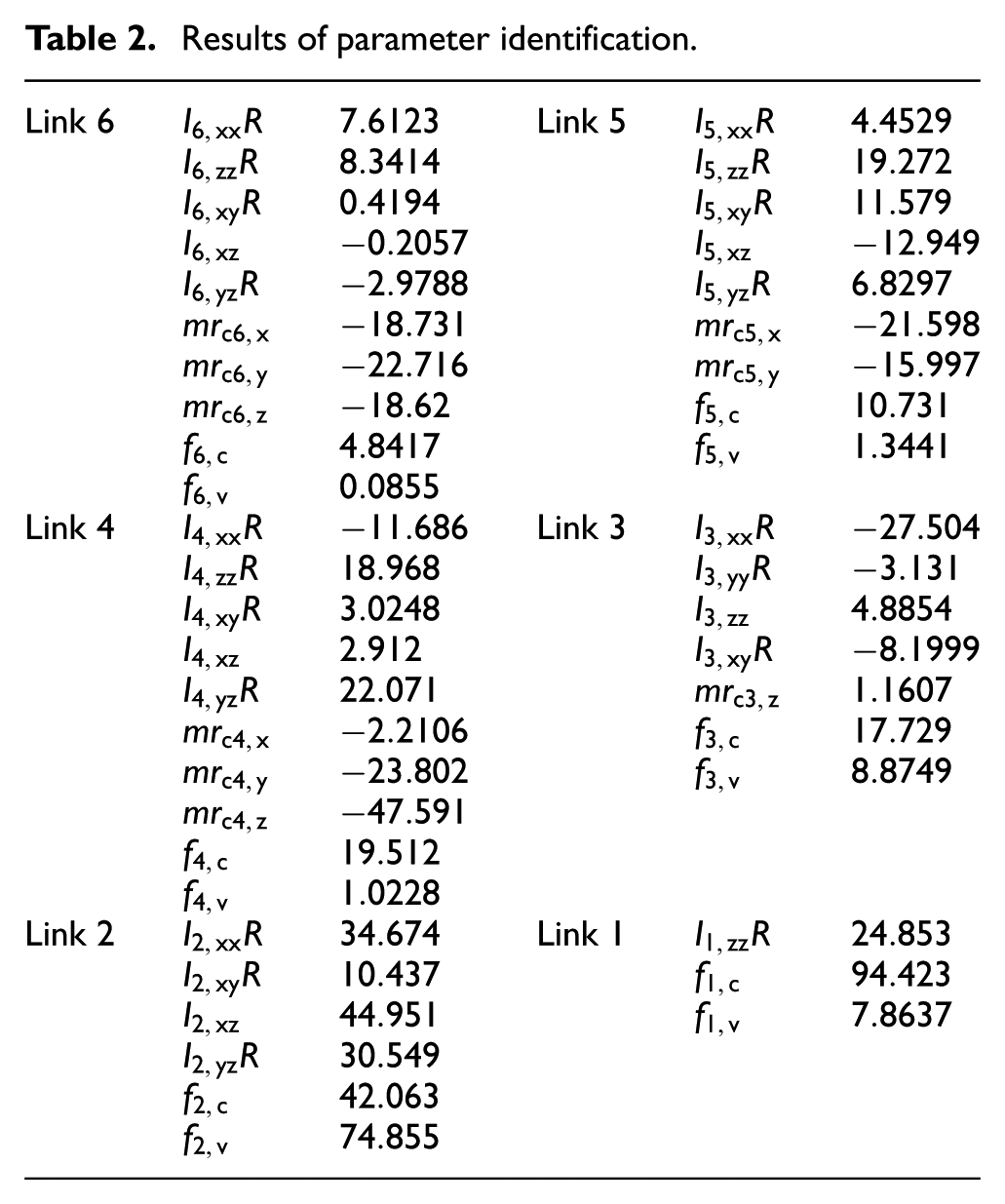
The results of parameter identification of ABB IRB 1200 without load are shown in Table 2, where
Results of parameter identification.

Simulated power and predicted power of each joint, and error of prediction.
The results of parameter identification are used to calculate the predicted total energy consumption of the motors during the six steps of parameter identification based on equation (14). It is compared with the simulated energy consumption. The results are shown in Table 3. It shows that the error of energy consumption modeling increases from step 1 to step 6. This is because the error of parameter identification accumulates in the step-by-step method. However, the error is small and acceptable.
The error of energy consumption modeling.

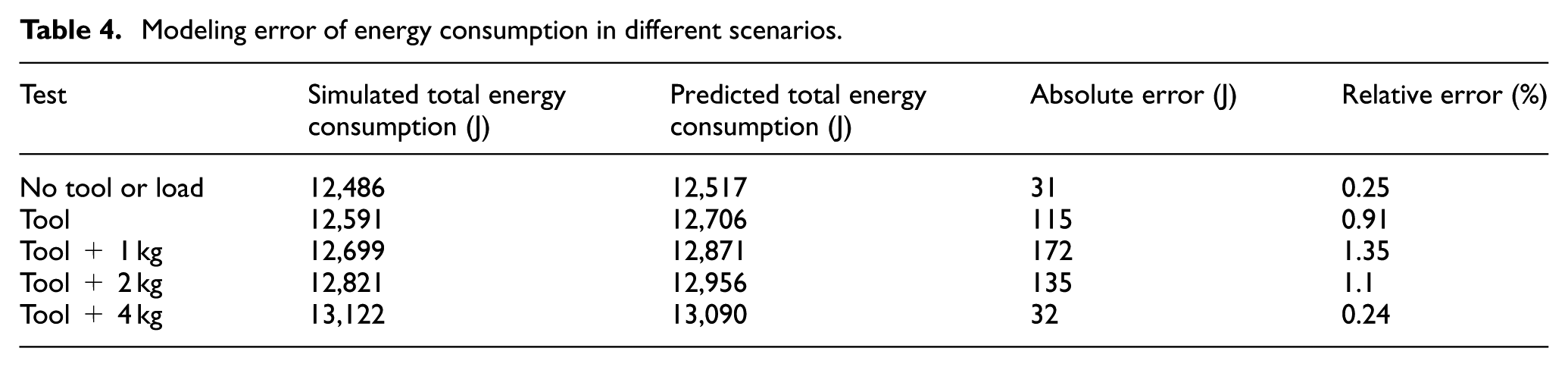
For scenarios where the robot carries tool and loads, the tool and loads are taken as a part of link 6. The power that is calculated based on parameter identification of the robot in five different scenarios (no tool or load, tool (1.32 kg), tool + 1-kg load, tool + 2-kg load, tool + 4-kg load, the trajectory is the same in all the scenarios) is shown in Figure 11. The energy consumption calculated based on equation (14) and the error of these scenarios are shown in Table 4. It is shown that the error in scenarios with tool and load is small enough. This verifies the accuracy of the energy consumption model.

Simulated and predicted total power of the motors in different scenarios.
Modeling error of energy consumption in different scenarios.
Energy consumption in a manufacturing task
A test is done to test the impact of robot speed on the energy consumption of the robot in a manufacturing task. The robot is commanded to move according to Figure 12 to fulfill a pick-and-place task. The path of the robot is denoted as follows: (1)A – (2)B – (3)C – (4)B – (5)A – (6)D – (7)A – (8)D – (9)A – (10)E – (11)F – (12)E – (13)A. The robot is installed with a tool. From (3)C, the robot carries a load. After (5)A, the robot releases the load. After (7)A, the robot carries a heavier load. After 10(E), the robot releases the load again.

Path of the robot in a manufacturing task.
An example of the simulated power of the motors when the speed is 0.5 m/s is shown in Figure 13. The green texts indicate the via points in the robot trajectory and the pink texts indicates the power value (the unit is W) during the movement of the robot. It can be seen from Figure 13 that from (1)A to (2)B the robot carries no load and the simulated power of the motors is 67.255 W. From (12)E to (13)A, the robot carries no load and the simulated power of the motors is approximately equal to that from (1)A to (2)B. From (4)B to (5)A, the robot carries a load and the power is 69.516 W which is larger than that from (1)A to (2)B. From (9)A to (10)E, the robot carries a heavier load and the power is larger than that from (4)B to (5)A. These results show that the simulated power reflects the characteristics of the robot motor power. In the future, we will perform quantitative comparison between the simulation results and the measured ones.

Simulated power of the motors when the speed is 0.5 m/s.
Different speeds (0.05, 0.1, 0.3, 0.5, 0.8, and 1 m/s) and loads (0, 2, and 4 kg) are used to perform the task and the energy consumption of each task is shown in Figure 14. It shows that the energy consumption increases with the increase of the load. When the load is the same, the energy consumption of the robot varies with the speed. Too big or too small speed both increase the energy consumption of the robot. This means that the speed should be appropriate to achieve lower energy consumption for the robot. However, the optimal speed for energy consumption reduction may affect the productivity. Therefore, a trade-off is needed in this situation.

Energy consumption of the motors with different loads and speeds.
Conclusion
This article has analyzed the energy consumption characteristics of industrial robot. The main focus is the energy consumption modeling of the motor which changes with the trajectory of the robot and can be optimized without causing physical changes to the robot. A method for parameter identification of industrial robot based on power data rather than joint torque is proposed. ABB IRB 1200 is used to demonstrate the method. The simulation results from RobotStudio show the effectiveness of the proposed method. Based on the parameter identification, the energy consumption model of the robot is obtained. The simulated results show that the energy consumption model shows satisfactory accuracy. In the future, we will compare the simulated power with the measured one quantitatively. The relation between the speed of the robot and its energy consumption is analyzed. The calculated results show that the speed should not be too high or too low to achieve optimal energy consumption. However, the productivity should also be considered in this situation. This is a trade-off problem and will be studied in the future research.
Footnotes
Acknowledgements
We gratefully thank Professors Quan Liu, Zude Zhou, and Duc Truong Pham for their valuable suggestions on the works reported in this paper. This is an extended version of a paper that was presented at the 19th Monterey Workshop, Beijing, China, 8–11 October 2016.
Handling Editor: Jining Sun
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This research was supported by the National Natural Science Foundation of China (Grant Nos 51775399 and 51675389), the Key Grant Project of Hubei Technological Innovation Special Fund (Grant No. 2016AAA016), and Engineering and Physical Sciences Research Council (EPSRC), UK (Grant No. EP/N018524/1).