
Abstract
In this study, codimension-two bifurcation analysis was used in conjunction with a novel control method to mediate chaos in a semi-active suspension system based on a quarter-car model with excitation introduced by the road surface profile. The results of bifurcation analysis indicate that the hysteretic nonlinear characteristics of the damping forces produce codimension-two bifurcation, resulting in homoclinic orbits and pitchfork bifurcation. We also characterized the complex dynamics of vehicle suspension systems using a bifurcation diagram, phase portraits, Poincaré maps, and frequency spectra. Furthermore, the largest Lyapunov exponent was used to identify the onset of chaotic motion and to verify the results of bifurcation analysis. We also developed a continuous feedback control method based on synchronization characteristics to eliminate chaotic oscillations. Finally, we conducted analysis on the robustness of parametric perturbation in suspension systems with synchronization control using Lyapunov stability theory and numerical simulations.
Introduction
Vehicle suspension systems are meant to isolate the body of the vehicle (and their occupants) from oscillations produced by a rough surface road profile. They are also meant to maintain continuous contact between wheels and the surface of the road. Ride comfort requires a long suspension stroke and low damping in wheel-hop mode. 1 The development of smart materials has prompted research into intelligent vehicle suspension systems featuring hysteretic damping characteristics based on electro-rheological fluid or magneto-rheological fluid.2–5 The hysteretic nature of damping forces in vehicle suspension systems under excitation means that they can be modeled as a multi-frequency harmonic function. Thus, vehicle suspension can be simplified as a hysteretic nonlinear system with multi-frequency excitation.
Nonlinear codimension bifurcation has been studied extensively.6–8 Farshidianfar and Saghafi 9 studied global bifurcation behavior in spur gear systems. He et al. 10 used the center manifold and normal form method to investigate codimension-two bifurcation behavior in a delayed neuron model. Tian et al. 11 examined the complex nonlinear dynamics associated with smooth, discontinuous oscillators. Vahdati and Kazemi 12 studied cascading period doubling bifurcations in periodic orbits emerging from Hopf bifurcations and chaos in power system. Ghosh et al. 13 investigated chaos and bifurcation in a permanent magnet direct current (PMDC) brushed motor caused by slotting effects and commutation.
The characteristics of suspension systems with hysteretic damping are inherently nonlinear due to the fact that hysteresis is not a smooth process. This nonlinear behavior and inherent instability in this type of system complicate controller design. To predict or control the performance of a system with a reasonable degree of accuracy requires that the effects of nonlinear phenomena be taken into account. Modern nonlinear theories pertaining to bifurcation and chaos have been widely applied in the study of stability in nonlinear systems, and several studies have investigated nonlinear dynamics in suspension systems14–17 as well as chaotic responses in nonlinear air suspension systems.18,19
Despite extensive research into the dynamic characteristics of suspension systems, the issue of codimension bifurcations has yet to be fully elucidated. In this study, we consider codimension-two bifurcation and homoclinic orbits in this type of system. We adopted a variety of numerical analysis methods, including bifurcation diagrams, phase portraits, Poincaré maps, and frequency spectra, to explain the rich dynamic behavior of vehicle suspension systems excited by the road profile. We also employed the well-developed algorithms used to compute Lyapunov exponents for smooth dynamical systems 20 to determine whether the system exhibits chaotic motion. Chaotic behavior degrades performance and restricts the operating range of numerous electrical and mechanical devices. Since the pioneering work of Ott et al., 21 researchers have developed a number of technologies to mediate the effects of chaos in a range of applications, including suspension systems.15,22–25
Improving the performance of a suspension system requires that chaotic motion be transformed into a steady-state periodic orbit. In this study, we developed a continuous feedback control method based on the properties of synchronization, as proposed by Pyragas 26 and Kapitaniak. 27 Simulation results demonstrate the efficacy of the proposed control mechanism. The design of the proposed feedback controller was validated through the application of optimal control and Lyapunov stability theories, which guarantee the global stability of a nonlinear error system.28–30
Mathematical modeling
Figure 1 presents the quarter-car model with hysteretic nonlinear damping force with a single degree of freedom 14 examined in this study

where Fh is an additional nonlinear hysteretic suspension damping and stiffness force that depends on relative displacement and velocity, as follows

and


Schematic diagram of the quarter-car model.
By defining a new variable for the relative displacement, y = x−x0, we can rewrite equation (1) as follows

where
The states are selected such that


The amplitude of road profile excitation is
Nomenclature and parameters.

Codimension-two bifurcation analysis
Our main objective in this analysis was to observe the qualitative behavior of a suspension system and determine how it varies with changes in system parameters. Changes were shown to occur near the equilibrium point of the system, which is referred to as local bifurcation. The codimension of a bifurcation is the minimum number of parameters that must be varied in order to observe a specific type of bifurcation. 8
All nonlinear analyses must be based on linear analysis. Thus, bifurcation analysis begins with the Jacobian matrix of equation (5). Using parameters (k1,c1) = (0,0), the Jacobian matrix has double-zero eigenvalues, which is the most degenerate situation (eigenvalues with zero real parts). This is the well-known codimension-two bifurcation problem. The bifurcation equations are written as follows


These bifurcation equations take the normal form, which is the simplest form for equations of motion.8,31–34
We adopted the blow-up technique to determine whether the cubic terms in equation (6) determine local behavior. The blow-up technique involves changing singular coordinates to expand degenerate fixed points into circles containing a finite number of fixed points. In cases where the fixed points are hyperbolic after the coordinate change, local flow near the circle is stable with respect to higher order terms (h.o.t.). This means that the flow near the original fixed point is also stable. If all of these fixed points are degenerate, then the coordinates must be changed again. If all of the fixed points become hyperbolic within a finite number of coordinate changes, then a system with only lower order terms will present the same qualitative behavior as the system as a whole. 8 The steps used in the blow-up method are as follows

(first blow-up)
Equation (6) becomes


Stability analysis reveals that the system has two degenerate equilibrium points, (0,0) and (0,π). Therefore, the blow-up procedure must be repeated.
For (0,0), the power series in the normal form is written as follows


Let

(second blow-up)
such that equation (9) becomes


After dividing by the unaffected common component ρ, equation (11) produces two hyperbolic fixed points (0,0) and (0,π). Therefore, no more blow-up is required.
For the other equilibrium point (0,π), the power series in the normal form is the same as in equation (9); therefore, the same results are obtained. The degenerate field contains cubic terms of the lowest order and unfolding is performed using the two-parameter family


where
The bifurcation set is the set in the parameter space on which the system bifurcates. It is obtained from the unfolded normal form equations.
There are three equilibrium points in this case:
(0,0) for all K1, K2;
By determining the stability of these equilibria, the bifurcation sets can be obtained as follows:
1. For K1 = 0
There is a subcritical pitchfork bifurcation if K2 > 0 and a supercritical pitchfork bifurcation if K2 < 0.
2. For K1 > 0 and K2 = 0
The rescaling technique and Melnikov’s perturbation method 8 are used to obtain the complete bifurcation set associated with homoclinic orbits for the unfolding bifurcation in equation (12).
Let


Melnikov’s method is then used to characterize the approximate relationship between K1 and K2.
After a series of operations, the following expression is obtained


Equation (14) yields a homoclinic saddle connection referred to as homoclinic bifurcation
3. For K1 < 0 and K2 = 0
The Jacobian matrix in equation (12) is written as

and the eigenvalues of DF(0,0) are

For changes in coordinates

Equation (12) then becomes

Let

According to the Hopf bifurcation theorem, 8 coefficient a cannot equal zero. In this case, equality with zero indicates that there is no Hopf bifurcation.
We performed numerical simulations using the original equation (5) to determine the validity of this bifurcation analysis. The parameter space was divided into several regions using bifurcation sets in Figure 2. We employed the commercial package DIVPRK of IMSL 35 using FORTRAN for mathematical subroutines to solve these ordinary differential equations. The resulting numerical simulations are presented in Figures 3–7. The results for each parametric region are discussed below.

Bifurcation sets associated with typical phase portraits in each region (P+: subcritical pitchfork, P−: supercritical pitchfork, SC: homoclinic bifurcation).

Phase portrait for region (I) with (K1,K2) = (0.02,0.01).

Phase portrait for SC with (K1,K2) = (0.02,0.0).

Phase portrait for region (II) with (K1,K2) = (0.02,−0.01).
Phase portrait for region (III) with (K1,K2) = (−0.02,−0.01).

Phase portrait for region (V) with (K1,K2) = (−0.02,0.01).
Region (I) includes two sources and a saddle. Initial conditions in the neighborhood of the two sources are an indication that the mass is distant from the equilibrium points (Figure 3). At the boundary between regions (I) and (II) (i.e. in the bifurcation set SC (K2 = 0, K1 > 0)), the system is integrable with homoclinic orbits (Figure 4). Therefore, if we disregard the damping term, the system is conservative. In region (II), the system is not integrable, presenting two sinks and one saddle. If the initial conditions are in the neighborhood of the saddle, then the mass returns to the two sinks (i.e. stable points) as the time approaches infinity (see Figure 5). At the boundary between regions (II) and (III) (i.e. in bifurcation set P−), the two sinks move closer to the saddle as the parameters approach bifurcation set P−, and the region of stability shrinks to zero. In region (III), the two sinks disappear and saddle (0,0) becomes a sink. This is a supercritical pitchfork bifurcation with an attracting sink region (III) (Figure 6). From regions (III) to (V), the eigenvalues for the Jacobian matrix cross the imaginary axis; however, Hopf bifurcation does not occur. This is a demonstration of linear dynamic behavior, similar to the situation in which a stable equilibrium point becomes an unstable equilibrium point (Figure 7). Between regions (V) and (I), boundary P+ must be crossed via subcritical pitchfork bifurcation. In Figure 2, K1 determines the number of equilibrium points and K2 determines the local behavior (e.g. stability or instability) and the existence of homoclinic orbits. Clearly, only a positive damping coefficient results in a stable system.
Analytical tools for observing overall characteristics of a vehicle suspension system
In equation (4), the amplitude of road excitation,

Bifurcation diagram showing the amplitude of road excitation

Period-one orbit at Ω = 8.25 rad/s: (a) phase portrait, (b) Poincaré map, and (c) frequency spectrum.

Quasi-periodic orbit at Ω = 7.98 rad/s: (a) phase portrait, (b) Poincaré map, and (c) frequency spectrum.

Quasi-periodic orbit at Ω = 8.07 rad/s: (a) phase portrait, (b) Poincaré map, and (c) frequency spectrum.

Quasi-periodic orbit at Ω = 8.17 rad/s: (a) phase portrait, (b) Poincaré map, and (c) frequency spectrum.

Chaotic motion at Ω = 7.964 rad/s: (a) phase portrait, (b) Poincaré map, and (c) frequency spectrum.
Analysis of chaotic behavior
Our analysis in section 4, cannot be used to identify chaotic motion in a suspension system. Thus, in this section, we use Lyapunov exponents to verify the occurrence of chaotic motion. In every dynamic system, a spectrum of Lyapunov exponents (λ) 20 indicates variations in the length, area, and volume of a phase space. Determining whether chaos exist requires only the calculation of the largest Lyapunov exponent, which indicates whether the nearby trajectories diverge (λ > 0) or converge (λ < 0), on average. Any bounded motion within a system with at least one positive Lyapunov exponent is defined as chaotic, whereas periodic motion requires that all Lyapunov exponents be nonpositive.
As shown in Figure 14, we computed the evolution of the largest Lyapunov exponent in the suspension system using the algorithm proposed by Wolf et al.
20
Figure 14 reveals the onset of chaotic motion at approximately Ω = 7.965 rad/s, that is, at point P1 where the sign of the largest Lyapunov exponent changes from negative to positive as the parameter Ω is slowly decreased. Between the points P1 and P2, the largest Lyapunov exponent approaches zero, such that the motion within the system is denoted as quasi-periodic. When the value of Ω exceeds P1 (e.g. when Ω = 8.25 rad/s), the Lyapunov exponents given by equation (5) are λ1 = −0.0297643 and λ2 = −0.0298612. The fact that the sum of these values (λ1 + λ2 = −0.0596255) is negative indicates that the motion of mass would eventually converge to a stable limit cycle. Using the Lyapunov exponents for a dynamic system with

where j is the largest integer that satisfies

Evolution of the largest Lyapunov exponent.
Chaos synchronization
Learning to predict the behavior of a chaotic system has a number of benefits; however, the ultimate objective is to assume control over the system. Improving the performance of a dynamic system requires that the chaotic behavior be converted into stable periodic motion. Suitable control methods must therefore be developed. The chaos control method proposed by Ott, Grebogi, and Yorke (OGY) 21 has been used to synchronize chaotic systems. The OGY method requires that the state of the system be continuously monitored using computer and Poincaré map to evaluate changes in the parameters. Corrections to the control parameters are slight and infrequent, such that fluctuating noise leads to occasional bursts into regions far from the desired orbits, which produces breaks in control or synchronization. To avoid these problems, Pyragas 26 and Kapitaniak 27 proposed a simple yet effective time-continuous control method by which to convert chaotic motion into periodic motion. This method involves the construction of a feedback mechanism in conjunction with a specific time-continuous perturbation. Figure 15 displays the proposed feedback control loop with external periodic perturbation. The proposed method is outlined briefly in the following.

Block diagram of the proposed continuous chaos control method.
Consider the following n-dimensional dynamic system


where

which is introduced into the chaotic system (20) as negative feedback. In equation (22), K represents the feedback gain.
When Ω1 = 8.25 rad/s is selected as the drive system, equation (5) reveals period-one motion


When Ω2 = 7.964 rad/s is selected as the response system, equation (5) reveals chaotic motion


To synchronize equations (23) and (24), we introduce into equation (24) a control signal in the form of equation (22).
When incorporated into equation (24), the control signal equation (22) yields the following coupled system, which is capable of achieving synchronization


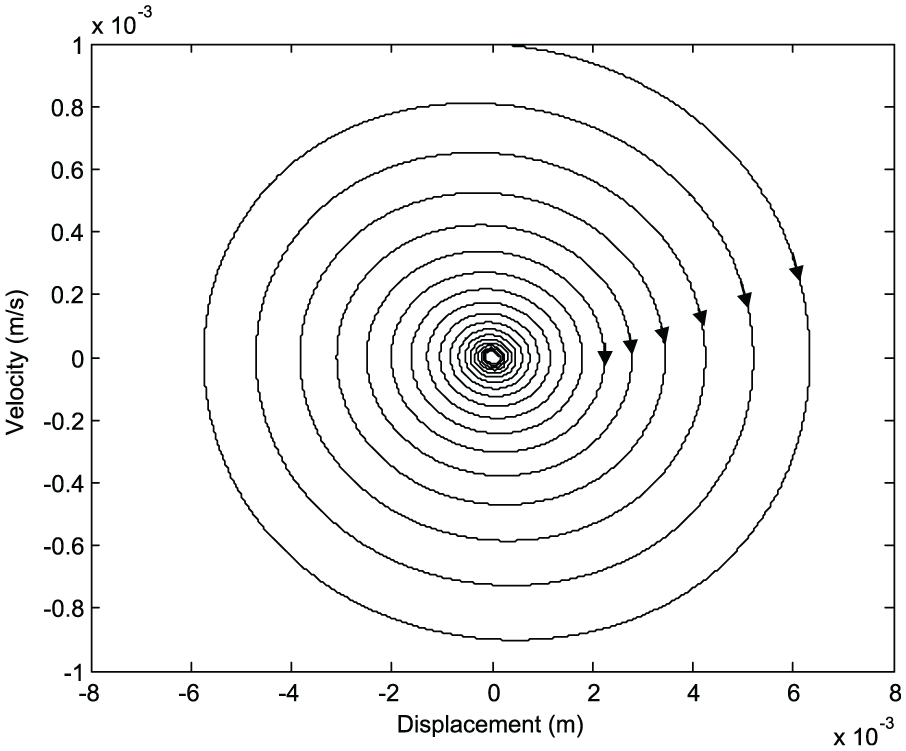
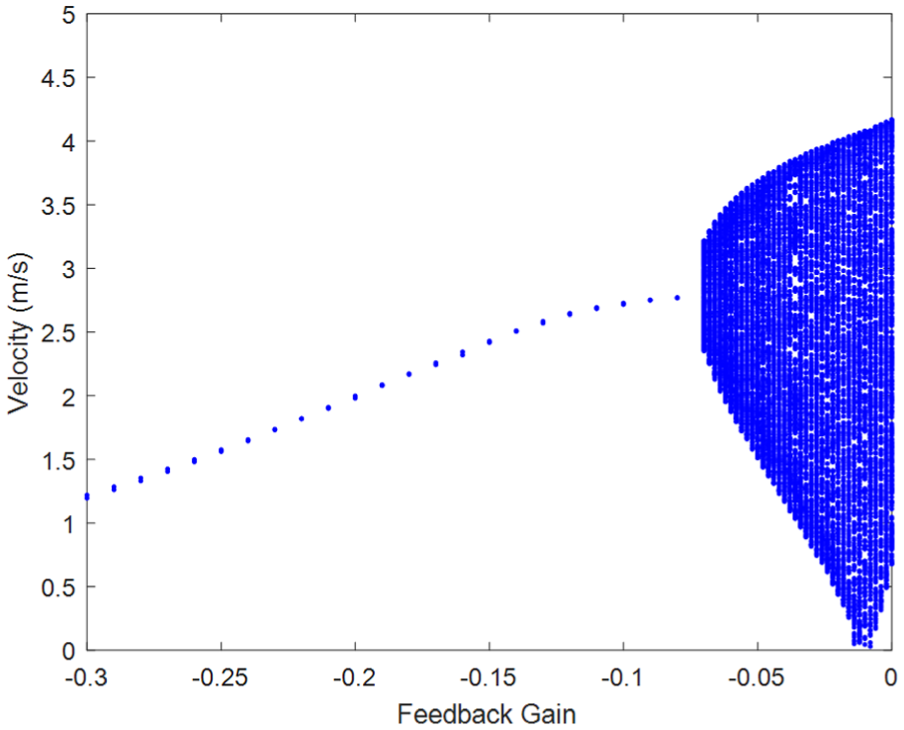
Equation (25) reveals chaotic motion (Figure 13) when K = 0 and Ω2 = 7.964 rad/s. The feedback gain K was adjusted to be between 0.0 and −0.3 in order to convert the dynamics of the system (25) from chaotic motion into periodic motion. Figure 16 presents the resulting bifurcation diagram, which comprehensively explains the dynamic behavior over a range of feedback gains. Chaotic motion appeared when −0.075 < K ≤ 0 (with and without the control algorithm) and periodic motion appeared when K ≤ −0.075. Accordingly, if chaotic motion were converted into periodic motion, then the feedback gain would be selected to satisfy the condition K ≤ −0.075. The chaotic suspension system in equation (24) can be synchronized by applying a control signal with K = −0.1, as shown in Figure 17. This means that chaos in the system can be managed using the control signal (K = −0.1), thereby enabling the conversion of chaotic motion into a period-one orbit. In Figure 17(a), the dotted line denotes the time response of the suspension system without a control signal, whereas the solid line denotes the time response of the suspension system with a control signal. Figure 17(b) shows the plot of a phase portrait of the system to which the control signal was added.

Bifurcation diagram of the system with continuous control, where K denotes the feedback gain.

Chaotic motion controlled to the desired stable equilibrium point for K = −0.1 and Ω = 7.964 rad/s: (a) time responses of displacement, where dotted line represents the chaotic trajectory of the uncontrolled system and solid line represents the corresponding stable orbit of the controlled system; (b) phase portrait of the controlled system.
Effects of parametric perturbation on suspension system when using synchronization control
We consider the effects of parameter errors on the performance of the proposed controller by implementing synchronization control of chaos through the addition of a sinusoidal perturbation to parameters ω, B1, B2, and B3 in the periodic excitation (drive system) in equation (23). Under the assumption that equation (23) represents the drive system, the corresponding controlled response system can be represented as follows


where ε is the amplitude of the perturbation and
Subtracting equation (23) from equation (26), we obtain the following error equation


where
Considering a Lyapunov function for equation (27)

We obtain the first derivative of V(e) as follows

Therefore, if we select


then

The correctness of these theoretical results was evaluated by performing simulations using the following perturbed parameters: ε = 0.05 and ω = 125.6 rad/s. Results of these simulations are presented in Figure 18(a) and (b). Figure 18(a) shows that e1 = z1 − x1 and Figure 18(b) shows that e2 = z2 − x2. These figures indicate that the synchronization error eventually converges to zero, resulting in stabilization of the error system. This implies that even in the face of parametric perturbations the controller is able to synchronize the states of the drive and response systems. This means that the proposed control method is robust to the effects of parameter mismatch in the suspension system. Finally, we use a bifurcation diagram to demonstrate the effects of parametric perturbations. The bifurcation diagram in Figure (19) clearly shows that the proposed control method is able to suppress the chaotic behavior under perturbed parameters (e.g. ω, B1, B2, and B3) in periodic excitation using equation (23).

Dynamics of synchronization errors for the drive system and the response system: (a) e1 = z1 − x1 and (b) e2 = z2 − x2.
Bifurcation diagram of the controlled system with synchronization under perturbed parameters:
Conclusion
This study focused on rich nonlinear dynamic behaviors in a vehicle suspension system with hysteretic damping. Our objective was to develop a method by which to control chaotic vibration. Dynamic behaviors can be observed over the entire range of parameter values of the bifurcation sets and bifurcation diagram. Bifurcation analysis was used to identify a codimension-two bifurcation structure with double-zero degeneracy in the system. The resulting bifurcation diagram indicates the existence of a quasi-periodic orbit and chaotic motion in the suspension system, thereby demonstrating the effectiveness of using the Lyapunov exponent as a tool for identifying chaotic motion. We developed a continuous feedback control method based on the properties of synchronization to suppress chaotic motion and thereby improve the ride of vehicles. The suspension system with synchronization control was analyzed in terms of robustness against parametric perturbation using Lyapunov stability theory and bifurcation diagram. The proposed synchronization control method does not require the monitoring of chaotic trajectories or the application of targeting procedures. The continuous nature of the synchronization-based control system makes it resistant to noise and facilitates application in actual vehicle systems. Simulation results confirm the feasibility of the proposed method. Our results provide insight into the operating conditions under which undesirable dynamic motion takes place in vehicle suspension systems. Our results also provide useful reference for engineers tasked with the design of control systems for vehicle suspension. The system considered in this article models an experimental vehicle suspension system, which could be used in subsequent investigations. Figure 20 presents a schematic depiction of the instrumentation used in the experimental study. A function generator supplied a sinusoidal signal. Waveform analysis in the time domain is made possible using an HP 3562A dynamic signal analyzer. The input signal of the controller includes the displacement, x, of the vehicle suspension system used in the experiments. A control signal is introduced into the chaotic system as a feedback control to synchronize the periodic signal with the chaotic system.

Experimental set-up.
Footnotes
Handling Editor: Yong Chen
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This research was supported by the Ministry of Science and Technology in Taiwan, Republic of China, under project number MOST 105-2221-E-212-016.