
Abstract
The quantitative evaluation of unmanned ground vehicles is difficult. For this problem, we propose a quantitative evaluation method based on chaos theory. First, the ideal trajectory of an unmanned ground vehicle was designed applying the quintic polynomial method, and the deviation time series were obtained by calculating the deviation of the actual trajectory from the ideal trajectory. Then, the phase space of the deviation time series was reconstructed based on the improved algorithm using correlation integral method. Finally, the Lyapunov exponent of the deviation time series was calculated, which was the quantitative presentation of the unmanned ground vehicle’s trajectory. The quantitative presentation of the unmanned ground vehicle’s trajectory for lane keeping, obstacle avoidance, and overtaking lane changing was achieved. The Lyapunov exponent of lane keeping was the least, so the maximum predicted time was the longest. Lane keeping was done the best of all. Experimental results show that the quantitative evaluation method based on chaos theory for unmanned ground vehicle trajectory is feasible and effective.
Foreword
It is difficult to objectively evaluate unmanned ground vehicles. Researchers from Carnegie Mellon University proposed a quantitative evaluation method based on a cost function for the unmanned ground vehicle Boss in low-speed, low-density traffic environments in 2007 Defense Advanced Research Projects Agency (DARPA) Urban Challenge. 1 Our research group also made some attempts to quantitatively evaluate unmanned ground vehicles. We proposed a qualitative and quantitative evaluation method based on a cost function 2 and a quantitative evaluation method based on fuzzy analytic hierarchy process (AHP). 3 Although the quantitative evaluation was completed using these methods, the quantification of the evaluation index was influenced by subjective factors. In order to achieve the objective and quantitative evaluation of unmanned ground vehicles, we need to study and explore more objective quantitative analysis methods.
In the field of robotics, many scholars have carried out a quantitative analysis of the behavior of mobile robots. Nehmzow et al.4–6 proposed a quantitative description of the behavior of mobile robots based on chaos theory. Schöner et al.7,8 applied dynamical systems theory to the analysis of robot behavior. Nehmzow proposed a quantitative analysis of the trajectories of mobile robots or their computer simulations, based on the error growth factor (EGF), an approximation of the Lyapunov exponent. Using the EGF, it can be shown that deterministic chaos can be present in the behavior of a mobile robot interacting with its environment. 9 Duckett and Nehmzow 10 presented statistical methods to assess the performance of robot localization systems. Zhang et al. proposed a fitness-scaling chaotic artificial bee colony (FSCABC) method for the task of path planning of uninhabited combat air vehicle (UCAV). The FSCABC employed the fitness-scaling method and the chaotic theory. 11 And then a fitness-scaling adaptive chaotic particle swarm optimization (FAC-PSO) approach was proposed as a fast and robust approach for the task of path planning of UCAVs. The FAC-PSO employed the fitness-scaling method, the adaptive parameter mechanism, and the chaotic theory. The FAC-PSO is more robust and costs less time than elite genetic algorithm with migration, simulated annealing, and chaotic artificial bee colony. 12
Borrowing the idea of the quantitative analysis of the behavior of mobile robots, a quantitative analysis method for the trajectories of unmanned ground vehicles applying chaos theory is proposed. The results can directly reflect the intelligence level of unmanned ground vehicles.
Article structure
The trajectory of unmanned ground vehicles is one of the parameters most closely associated with their behavior, such as X-axis and Y-axis positions change with time. A flowchart for the quantitative analysis of the trajectory of an unmanned ground vehicle is shown in Figure 1:
The ideal trajectory was designed applying the quintic polynomial method combined with trajectory parameters of an excellent driver.
The deviation time series were obtained by calculating the deviation of the actual trajectory from the ideal trajectory of unmanned ground vehicles.
The time delay and the embedding dimension were calculated by the correlation integral (C-C) method, and then the phase space of the deviation time series was reconstructed.
The quantitative description of the trajectory of unmanned ground vehicles was achieved by calculating the Lyapunov exponent.
The third and the fourth steps are the focus of this article. The quantitative analysis of the trajectory of an unmanned ground vehicle was achieved by applying the phase space reconstruction and the Lyapunov exponent method based on chaos theory.
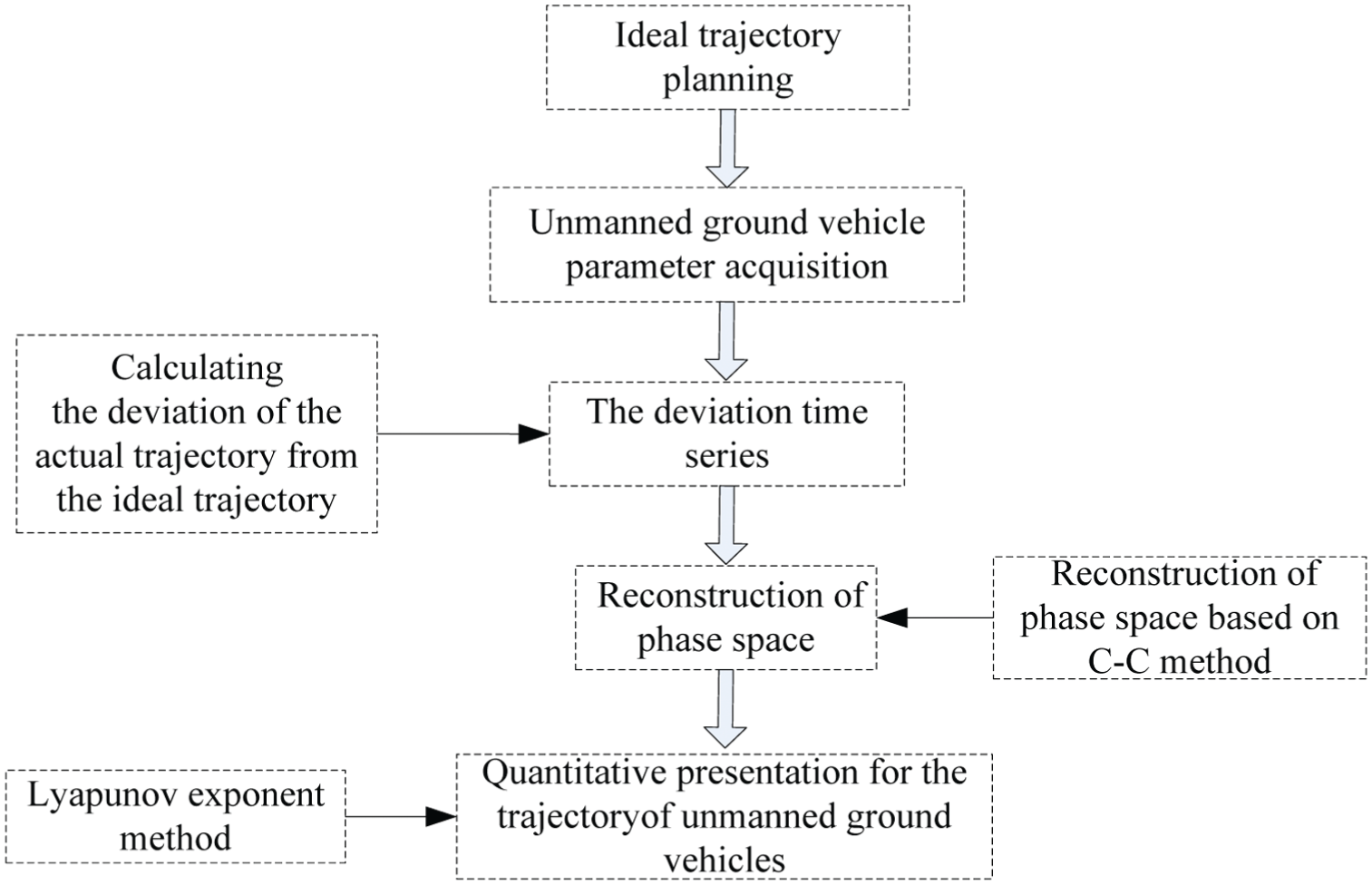
Flowchart of the quantitative analysis of the trajectory.
Quantitative analysis method
This section presents the quantitative analysis of the trajectory of an unmanned ground vehicle, including the phase space reconstruction of the deviation time series and calculating the Lyapunov exponent.
First, the deviation time series
Phase space reconstruction based on the C-C method
“Phase space” means the space of all possible states of a system; each possible state of the system has a corresponding point in phase space. In order to fully reveal the hidden information about the deviation time series of the unmanned ground vehicle trajectory and restore the characteristics of the attractor, the phase space was reconstructed based on the C-C method. 13
The appropriate time delay

where
Calculate the standard deviation
Calculate the amount of the following three formulas



where


Find from the calculation results in equation (2): The first minimum value of The first zero of The minimum
If the deviation
Calculate Lyapunov exponent
According to chaos theory, the largest Lyapunov exponent being negative indicates that the motion of the system will eventually converge to a stable equilibrium point, zero indicates that the motion of the system will eventually converge to a stable movement pattern, and positive indicates that the motion of the system is in a chaotic state. 13
To calculate the Lyapunov exponent of the deviation time series of an unmanned ground vehicle trajectory
Calculate the mean period
The time delay
The phase space
Find the nearest neighbor points

Calculate the distance

Calculate the average of all

where
The ideal trajectory design
The trajectory of unmanned ground vehicles was quantitatively analyzed using chaos theory to evaluate the intelligence level of unmanned ground vehicles. The actual trajectory and the ideal trajectory of unmanned ground vehicles are needed for the quantitative analysis calculation.
The actual trajectory of unmanned ground vehicles can be gained through the integrated positioning test technology, but the ideal trajectory of unmanned ground vehicles is different for different scenarios and tasks. For straight and curved lane following, the ideal trajectory of unmanned ground vehicles is the center line of the lane. For complex scenarios and tasks, such as obstacle avoidance and lane change, the ideal trajectory was designed specifically. Static obstacle avoidance is essentially a lane change process which is a good example for introducing the method of determining the ideal trajectory of an unmanned ground vehicle. The test scenario is shown in Figure 2.

Lane changing scene of the static obstacle avoidance.
First, the trajectory of the outstanding driver driving the vehicle is collected to obtain the driving parameters: displacement, velocity, time, heading angle, front wheel angle, and so on, and then the initial state and the target state are obtained.
The ideal trajectory for static obstacle avoidance by an unmanned ground vehicle is planned according to the initial state and the target state which were obtained from the outstanding driver and ensuring that the vehicle arrives in the adjacent lane at the appointed time. We used the function

The derivative with respect to time is

The second derivative is

The initial state and the target state of the lane changing of unmanned ground vehicles are


where
According to China’s “highway traffic management approach,” the time distance between vehicles is about 3–4 s. The safe distance between vehicles is

where SS is the safe spacing,

The safe spacing of the static obstacle avoidance is therefore

Substituting into the initial and target states and rearranging

where
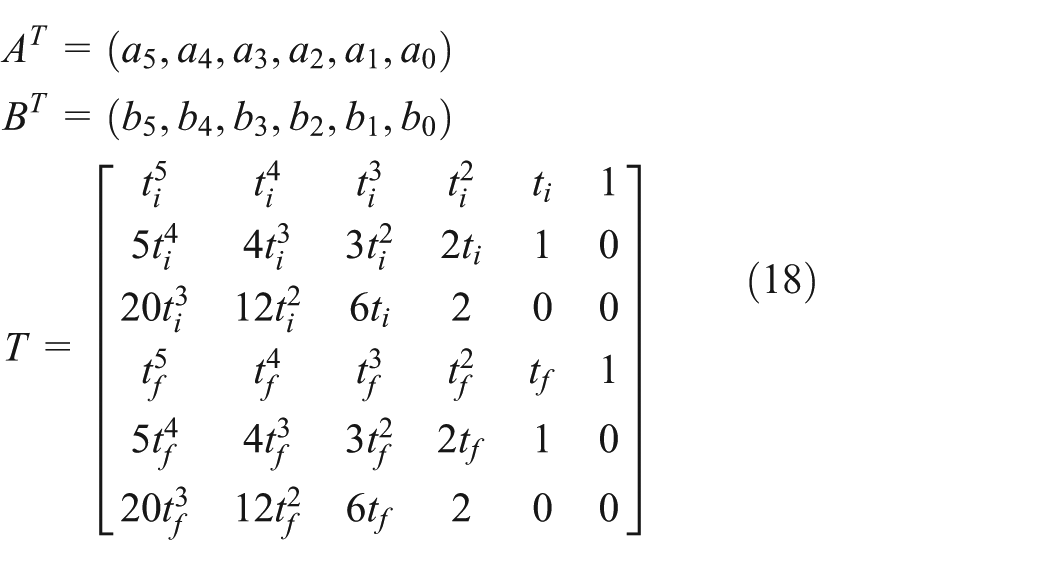
Therefore, the design of the trajectory becomes a problem of satisfying the boundary conditions.
Experimental demonstrations
Test data acquisition
The Ray unmanned ground vehicle test platform uses Global Positioning System (GPS) and an inertial navigation system to provide the position and the attitude information of the vehicle (as shown in Figure 3). The driving parameters of Ray’s trajectory

Ray unmanned ground vehicle test platform.
Quantitative analysis
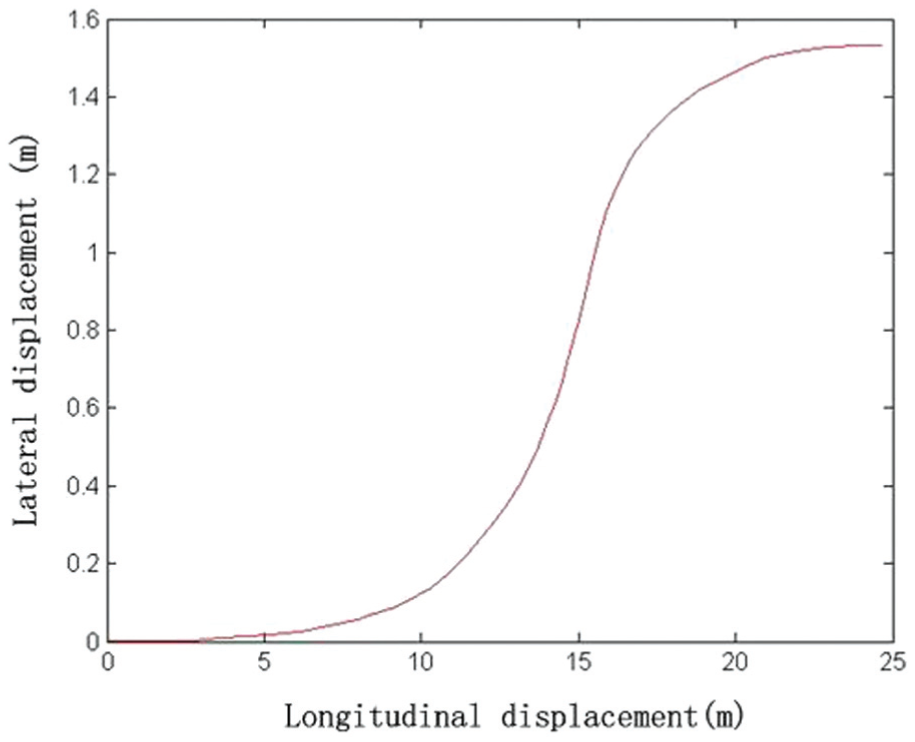
The lane changing of the static obstacle avoidance is used as an example to illustrate the quantitative analysis process of an unmanned ground vehicle trajectory. We first collect the trajectory of lane changing of Ray when driven by an outstanding driver, as shown in Figure 4.

Trajectory for obstacle avoidance and lane changing.
The initial state


This figure shows that the curvature of the ideal trajectory changes continuously; there is no mutation, and the curvature of the start and the end of the lane changing is zero. By comparison with the manned trajectory, we can visually see the curvature of the ideal is smoother.
The actual trajectory of Ray was collected as shown in Figure 5. The deviation time series were obtained by calculating the deviation of the actual trajectory from the ideal trajectory of Ray.
Actual trajectory of Ray.
The time delay and the embedding dimension were selected for the deviation time series based on the C-C method (Figure 6). Then, the m-dimensional phase space was constructed (Figure 7).
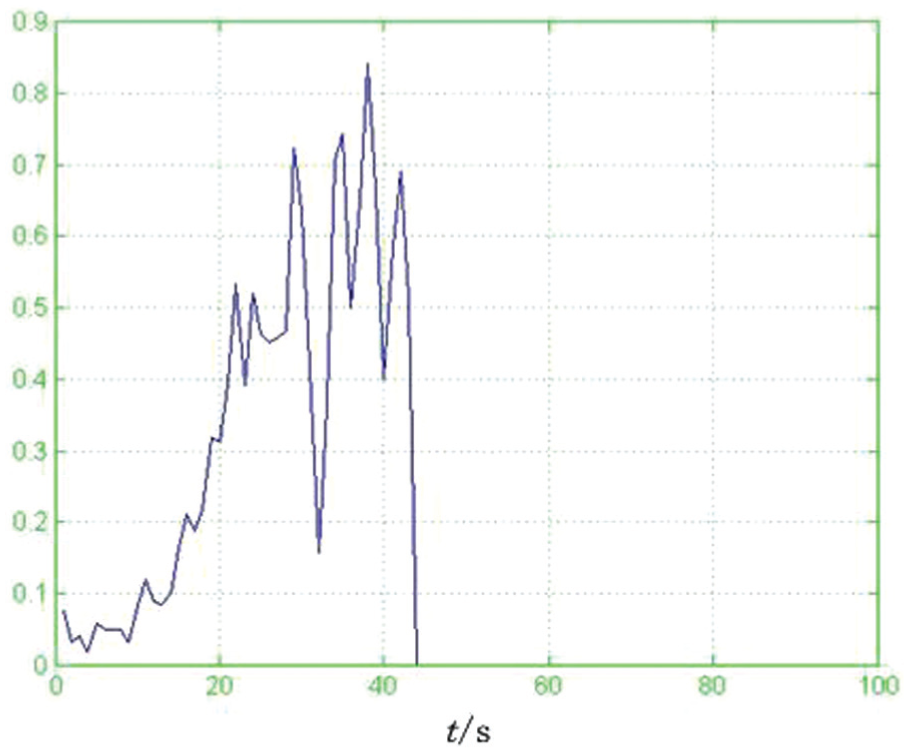
Time delay of the deviation time series.
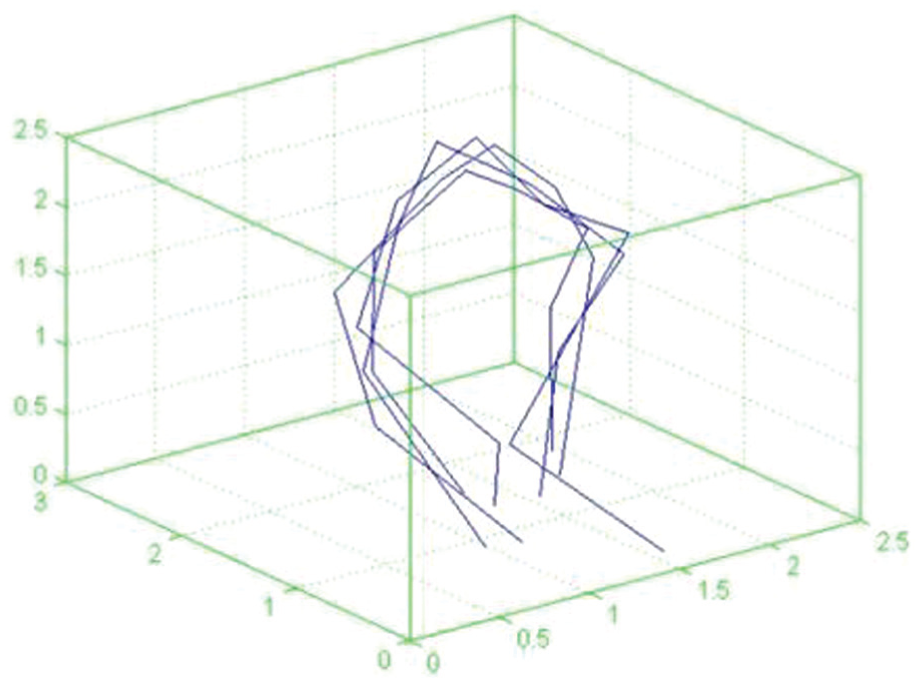
Phase space of the deviation time series.
Finally, the Lyapunov exponent of obstacle avoidance lane changing is calculated. It is 3.3572.
The lane keeping and the overtaking of Ray were quantitatively analyzed using the same method. In Figure 8, the top left shows the ideal trajectory of the lane keeping of Ray, the top right shows the actual trajectory of the lane keeping of Ray, the bottom left shows the time delay of the lane keeping of Ray, and the bottom right shows the phase space reconstruction of the lane keeping of Ray.

Quantitative analysis of the lane keeping of Ray.
In Figure 9, the top left shows the ideal trajectory of the overtaking of Ray, the top right shows the actual trajectory of the overtaking of Ray, the bottom left shows the time delay of the overtaking of Ray, and the bottom right shows the phase space reconstruction of the overtaking of Ray.

Quantitative analysis of the overtaking of Ray.
The Lyapunov exponents of the deviation time series of Ray were calculated. The results are shown in Table 1.
Lyapunov exponent of Ray’s trajectories.

The Lyapunov exponents of the lane keeping, obstacle avoidance, and overtaking of unmanned ground vehicles are positive. This indicates that the processes of lane keeping, obstacle avoidance, and overtaking of unmanned ground vehicles are chaotic. The size of the Lyapunov exponent represents the speed degree of the unmanned ground vehicle’s convergence to the steady-state response. The reciprocal of the Lyapunov exponent represents the maximum predictable time of unmanned ground vehicles. The Lyapunov exponent, the greater the chaos of the system, and the shorter the maximum predictable time, and vice versa. As can be seen from Table 1, the maximum predictable time of the lane keeping of Ray is the longest, and the maximum predictable time of the overtaking is the shortest. It can be seen that the unmanned ground vehicle performed better for the simple environment and the simple task, and it can be quantified by the Lyapunov exponent intuitively.
Conclusion
The trajectory of unmanned ground vehicles was studied using chaos theory. The phase space of the deviation time series, which is the deviation of the actual trajectory from the ideal trajectory, was reconstructed, and then the maximum Lyapunov exponent was calculated to achieve the quantitative analysis of the trajectory of unmanned ground vehicles. If the maximum Lyapunov exponent is greater than 0, it can be judged that the trajectory of the unmanned ground vehicle is chaotic. The chaotic time series analysis method can effectively determine whether the trajectory of the unmanned ground vehicle is chaotic.
Theoretical analysis and experimental results show that the Lyapunov exponent can not only represent the chaos of unmanned ground vehicles but also represent the speed degree of an unmanned ground vehicle’s convergence to the steady-state response. The Lyapunov exponent gives objective and quantitative results.
The quantitative analysis of the trajectory of unmanned ground vehicles can achieve a quantitative evaluation method for unmanned ground vehicles. It can lay a good foundation for improving the test and evaluation system of unmanned ground vehicles and establishing evaluation standards.
Footnotes
Academic Editor: Duc T Pham
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This research was supported by the National Natural Science Foundation of China (grant nos 90920304 and 91120010) and the Science and Technology Research Youth Foundation of Hebei Province (grant no. QN2015129).