
Abstract
Active hydrostatic journal bearings represent a mechatronic answer to the fast-growing industrial needs to high-performance rotary machineries. The aim of this research is to study and improve the dynamic characteristics of hydrostatic bearing, with four pockets or recess. In order to improve dynamic characteristics for hydrostatic journal bearing, this research presents an active hydrostatic journal bearing with servo control. The results of active hydrostatic journal bearing with servo control were compared with those of traditional hydrostatic journal bearing with capillary throttling. The dynamic characteristics of the newly proposed bearing and traditional bearing are studied and compared under different dynamic conditions such as variable speed, viscosity, load, pressure, and bearing clearance. The numerical result shows that the proposed active hydrostatic journal due to active lubrication has good performance including stability and controllability, high stiffness, faster response, and strong resistance. Furthermore, two strategies such as proportional–integral–derivative and integrator backstepping control are also presented to improve the performance and efficiency of active hydrostatic journal bearing with servo control. The result shows that integrator backstepping control is more effective than proportional–integral–derivative control in terms of faster response and greater amplitude reduction, quickly regaining equilibrium position, and good stiffness against load. Hence, it is observed that active lubrication in hydrostatic journal bearing provides us better dynamic characteristics which will have potential applications in heavy and high-speed machinery.
Keywords
Introduction
Precision rotary equipment has been utilizing hydrostatic journal bearing because they provide superior characteristics. These bearings provide higher positional accuracy, greater stability, and low friction. For these reasons, many researchers have worked on hydrostatic journal bearings. Rao et al. 1 studied and analyzed the performance of a long hydrostatic journal bearing which has porous double-layer lubricant film. Li and Wang 2 analyzed the tribological performance of journal bearing under the influence of bulges around laser surface textures. Zhang et al. 3 worked on plain journal bearings and analyzed the effects of thermal boundary conditions. Cha et al. 4 worked with compliant cylindrical journal bearings and studied the dynamic performance with linear and nonlinear numerical methods. Kim et al. 5 studied and analyzed the effects of different recess shapes on the behavior of journal bearings and derived equations of perturbation and general Reynolds equation. Thomsen and Klit 6 further studied hydrodynamic journal bearing and the effects of compliant layers over their behavior. De Pellegrin and Hargreaves 7 worked on a spring-supported tilting-pad thrust bearing and analyzed its behavior by deriving isothermal and isoviscous models of hydrostatic recesses. Phalle et al. 8 investigated the performance of a membrane-compensated hybrid journal bearing system under the influence of wear. All these studies proved to play a vital role in improving the performance of traditionally used journal bearings in normal operational environmental conditions.
Speaking of operational conditions, these conditions play an important role and the behavior of journal bearings is severely restricted. So many studies have been carried out by lots of researchers to augment the dynamic features of these bearings, such as the rigidness of oil film and the stability of rigid rotor. Bouaziz et al. 9 worked on the dynamic performance of the misaligned rotor. Sharma and Rajput 10 analyzed the performance of a hybrid journal bearing in theory, using a journal bearing with geometric imperfections. Tala-Ighil et al. 11 studied the features of hydrodynamic journal bearings by a numerical method to study the effects of cylindrical texture shape on the bearing behavior. These studies indicated that appropriate variation of texture area on the contact surface can significantly enhance the properties and features of these bearings. Sharma et al. 12 investigated the wear–tear phenomena on a hybrid conical journal bearing with four pockets. The findings of this study suggested that the increased radial positional accuracy and stationarity of traditional journal bearings directly influence the behavior of mechanical equipment under harsh operational conditions. Some efforts were made to control rotor vibration through servo valve with active lubrication but problem still exists that the model is linear and all the calculations for control gain are based on a linear procedure. 13 Whenever there is a requirement of high speed and high stiffness, then active lubrication is thought to be the solution, which provides good damping and high stiffness properties to the system.14,15 With the help of theoretical work for hybrid bearing, it is proved that active lubrication helps reduce cross-coupling stiffness and increase direct damping coefficient, which increase the stability of the rotor–bearing system. 16 With that being said, it is possible to enhance the performance and efficiency of a hydrostatic journal bearing using an active control technology. Nicoletti and Santos 13 presented an active control for the vibration of a flexible rotor using an output feedback controller where controller was designed on the base of calculated gains. Santos has used different type of actuators such as hydraulic, magnetic, and piezoelectric for controlling vibrations and active lubrication in different types of fluid bearings. Santos has successfully demonstrated that active lubrications has advantages such as; reducing cross coupling stiffness, increasing direct stiffness and damping coefficient.14,16,17,18
Kim and Lee 19 worked on the enhancement of dynamic pressure by investigating the characteristics of a film damper which is sealed squeeze. And their results indicated that active control technology is valid in dampers. Ho et al. 20 studied and analyzed the effects of thrust magnetic bearings on the bifurcation and stability of the flexible rotor active magnetic bearing system. Nicoletti and Santos 21 worked on the active lubrication rotor/tilting-pad bearing system and analyzed the frequency response. Estupiñan and Santos 22 successfully obtained the mathematical model of the multi-body systems which were interconnected through thin films of fluid, and it can be easily controlled using various kinds of actuators. Haugaard and Santos 23 and Nicoletti and Santos 21 worked on active lubrication of tilting-pad journal bearings and studied the dynamic performance in theory. These studies were targeted on the traditional investigation of stiffness in bearings and damping in the frequency domain. All the precision rotary equipment have been widely and more commonly utilizing these hydrostatic journal bearings, and with that it is required to have a bearing with better performance and reliability. Santos and Watanabe 16 worked on the enlargement of the stability threshold of the hydrostatic bearing and theoretically studied the feasibility to reduce vibrations. With lots of researchers exploring these areas, nobody has worked for controlling the accuracy of position of the spindle or shaft for hydrostatic journal bearings under external load condition and no literature is available on this part. However, some efforts were made but a lot of deficiencies exist in modeling and controllers were not modern.24,25
The hydrostatic journal bearings are normally being utilized in operating conditions where high loads and speeds are required. These conditions greatly reduce and affect the performance. As mentioned earlier, after reviewing the available literature, we cannot find any studies/research on the behavior and characteristics of active journal bearings influenced by such operating conditions. This article addresses this issue, tries to fill this gap, and investigates in real time the effects of operational conditions on the dynamic characteristics of active journal bearings to identify accurate control of shaft eccentricity/positional accuracy.
In order to achieve our objectives, we analyzed the dynamic characteristics of the proposed active journal bearing, and then under the same operating conditions we compared the experimental results to those of a traditional passive hydrostatic journal bearing with capillary throttling (HJBCT), to check and verify the reliability of the obtained results from this simulation method and in Wang et al. 26 Our results showed that using this active lubrication with servo valve controller we can achieve a significant amount of amplitude reduction and critically improve the positional accuracy or shaft eccentricity.
Working principle
In Figure 1, a schematic of a hydrostatic journal bearing with servo control (HJBSC) is presented. In order to produce a layer of oil film thickness in the bearing clearance, a combination of different hydraulic auxiliaries is used such as pump, motor, and energy accumulator. This pressurized oil film provides force to support the journal or spindle, making a uniformly distributed oil film. To measure the thickness of this oil film with regard to eccentricity, few displacement sensors are aligned in the vertical and horizontal axes. Arduino UNO hardware is connected to the already available computer system using USB interface, and Simulink is used to develop control interface by setting up analog ports for Arduino UNO hardware. Simulink is used to write programs for integrator backstepping control strategy. Then, using Arduino UNO hardware support package, this code was downloaded to the Arduino UNO hardware. Displacement sensors provide feedback signals to the Arduino hardware, to measure the thickness of the oil film, which is directly related to eccentricity along the vertical and horizontal axes. Arduino hardware is responsible for driving the servo valve by providing appropriate driving current/voltage signal. In this case, the provided current/voltage signal was not enough to drive the valve, due to which a buffer amplifier is used to amplify the driving signal and this amplified signal feeds the servo valve. In our experiment, a two-stage electrohydraulic servo valve (EHSV) from Star hydraulics is used. It works in two stages. In the first stage, it boosts and enlarges the output of the torque motor to control major flow forces, frictional forces, and the forces caused by excessive acceleration and vibrations. With the application of current signal to the torque motor, this motor drives the spool of the servo valve under the effect of magnetic field. Controlled flow transmission is modulated with the help of spool displacement. There are four pockets/recesses in an active hydrostatic journal bearing, which are aligned as shown in Figure 1 along the vertical and horizontal directions in pair. Conventionally, in all hydrostatic bearings, constant supply of pressure fluid is provided to these four recesses using either an orifice or a capillary restrictor. Furthermore, the flow is injected into the opposing bearing recess pairs to compensate for active and dynamic fluid pressure of the film and cross-coupling effect.

The geometry of the hydrostatic journal bearing: (a) explanation of hydrostatic journal bearing attached with feedback servo control and (b) unwrapped bearing surface for analysis.
Problem formulation and coupled system
The structure of hydrostatic journal bearing and its cross-sectional view are shown in Figures 1 and 2, respectively, which contain hydrostatic journal bearing, servo valve, and hydraulic auxiliaries as shown in Figure 1. The hydrostatic journal bearing is superior to hydrodynamic bearing because of some advantages such that the surface of the journal and bearing is separated by a thin layer of fluid film under all types of speeds and loading conditions. As a consequence, hydrostatic journal bearing does not face wear and sliding friction even at low speed. The important advantages of hydrostatic bearing are its better stiffness properties against radial applied loads. In hydrostatic journal bearings, good stiffness properties are maintained under any load conditions such as from zero loads to high working loads as well as from low speed to high speed. Such type of behavior is not seen in hydrodynamic bearings. The efficiency and dynamic characteristics of hydrostatic journal bearings depend upon the clearance gap which is present between the outer periphery of the journal and the inner periphery of the bearing as shown in Figure 1. Throttlers have a large influence in controlling the oil film thickness in these clearance gaps. Fixed throttlers have limited capacity and performance, while this article provides active throttling which can provide better performance under varying bearing clearance.

Schematic of the cross-sectional view of bearing.
Mathematical modeling of servo-controlled hydrostatic bearing system
Servo valve is an integral component of the active hydrostatic bearing system. This research work consists of an EHSV which has two stages and critical center. It has a directly proportional relationship between the current applied to the torque motor and the position of a spool of EHSV. The displacement of the spool (which in fact shows the position of the spool) controls and adjusts the opening of the EHSV as a result of modulating the flow of the fluid to the hydrostatic journal bearing. Normally, the behavior of an unloaded EHSV is described with second-order differential equations.
27
Information on the coefficients of second-order deferential equations such as eigenfrequency, damping factor, and gain of EHSV is obtained from the manufacturers.28,29 The EHSV is responsible for controlling the flow along different directions with the help of fluid flows

The input signal

From Figure 1, it can be seen that opposite recess pairs are responsible for motion in their corresponding direction such as recesses 1 and 3 for the Y direction and recesses 2 and 4 for the X direction. In order to avoid complications and problems, this research will be carried out taking a load along the Y direction.
Suppose that nonlinearities are ignored for derivation of a mathematical model of EHSV. The EHSV current

The process which is controlled by EHSV involves equations such as pressure and flow equations, and these equations are nonlinear. So there is a need for linearized analysis that must be done. Machine computation would be a big assistance to find solutions for such nonlinear equations, but the result can only be applied to a system when numerical values of the coefficients are assumed. If the nonlinear solution is obtained, but still all would not be well due to the interpretation of data, the design procedure and performance specification are based on linear theory. That is why linearization is important, but one should investigate all operating points for variables. Suppose that there is allowance which is made for the ranges of parameter values that a parameter can assume because of different operating points. Then linear analysis is not unduly restrictive. Loading servo valve flow is directly proportional to the eccentricity of the journal. The corresponding flows through the recess are denoted by

Similarly for the Y direction

For the hydrostatic journal bearing which has thin land, the transfer function can be obtained theoretically by analyzing the effect of dynamic changes (which occur due to changes in pressure and fluid film thickness) into and out of bearing recess or pockets. Whenever there is a change in oil film thickness, squeezing effect comes into play. So squeeze flow for hydrostatic bearing is given by

Flow is often due to the application of pressure at one end. Shear stress is one of the reasons which cause restriction in the path of the fluid flow between two circular surfaces. The motion of the journal in the hydrostatic journal bearing produced surface velocity. Surface velocity is zero at the boundary surface and increases to a maximum value where the center of oil film thickness is present as shown in Figure 3.

Combined pressure- and velocity-induced flow.
Consider an assumption that pressure across the flow is constant such that

This leads to

Substituting

Integrating and applying boundary conditions such as

Flow rate is an integral of velocity, which is given by

Suppose that there is a recess or pocket of width

Equation (11) is very useful; it is used to obtain the flow due to pressure and surface velocity. Pressure is generated due external source of pumping, while surface velocity is generated due to the relative motion between the journal and the bearing surface.
Fluids are thought to be incompressible in a lot of applications and daily calculations, but in applications where there is dynamic loading of higher frequency, such as in the case of hydrostatic bearing, the compressibility factor becomes prominent and cannot be ignored. Compressibility has good effect on stiffness and damping of bearing. Compressibility of a fluid depends upon its bulk modulus of elasticity. The relationship between change in volume and change in pressure is given by

Rearranging equation (12) and differentiating according to time

Rate of change of volume is often called compressible flow when this rate is due to external load such as in the case of hydrostatic journal bearing; then this will be called compressible flow for hydrostatic bearing so equation (13) takes the new form which is given by

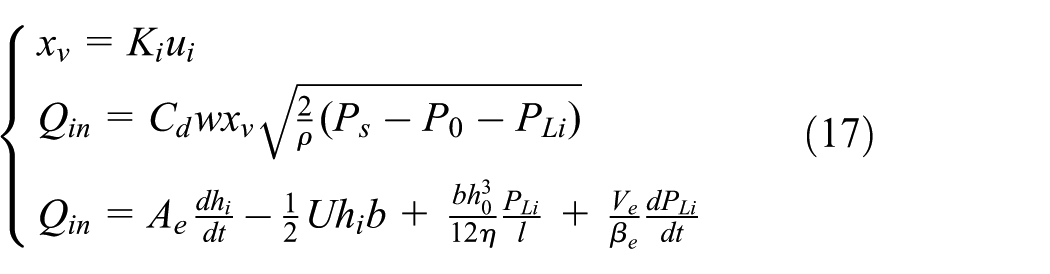
Flow through the bearing will be linear when the shaft is under the central position and flow is streamline. Suppose we have an assumption such as hydraulic pipes are thick and friction effects within the pipe can be ignored, fluid temperature is constant, and modulus of elasticity is constant. Then, the continuity equation of flow for hydrostatic bearing can be used to get overall flow equation for hydrostatic bearing.32,33 Where the flow delivered by servo valve to hydrostatic bearing is equal to the summation of squeezing flow, compressibility flow and pressure-velocity flow of hydrostatic bearing.
The dynamic equation of motion of a system depends upon bearing fluid film stiffness, arrangement of masses, and structure linkages. The performance of hydrostatic bearing for any value of eccentricity is normally described in terms of bearing coefficients. To illustrate the coefficients of hydrostatic bearing, consider a rigid shaft that is supported by oil film, which provides stiffness against external load as shown in Figures 4. To support the load by fluid oil film, the equations of motion for hydrostatic bearing are given by


Illustration of how the hydrostatic bearing film may be considered in isolation from external force.
Design strategy
In this article, two design strategies are proposed for HJBSC: one is proportional–integral–derivative (PID) controller and the other is integrator backstepping controller.
PID design strategy
PID controller is used widely in a lot of engineering applications due to its best properties of ease of operations and satisfactory performance. PID is thought to be best in the industry due to its proportional, derivative, and integral functions. Proportional controller reduces the rise time, while the integral controller reduces the steady-state error and the derivative controller smooths the signal over time. The PID controller takes the error signal from the amplifier which produces an error signal by comparing the initial value of the oil film thickness of bearing clearance or the current value of oil film thickness. Then it generates the output according to the current value of error. This output is used to derive the servo valve as shown in figure 5.

Block diagram of the feedback system.
A program of Simulink is used to design the PID controller and the parameters of the controller are tuned according to hit and trial method. A fitness function which is given by equation (16) is used to find the correct and accurate values of the controller. This fitness function finds the sum of errors between the output and the reference value as shown in figure 6.


Flow chart for adjusting parameters online.
Proposed design staretgy
The proposed strategy to control bearing clearance is shown in Figure 7, which consists of disturbance rejection controller, integrator backstepping controller (IBSC), and the mathematical model. There is an integrator backstepping controller, which takes the initial value of oil film thickness as the reference and the feedback value of bearing clearance and try to obtain equilibrium position under disturbance or any other loading conditions. There is also a disturbance rejection controller, which further improves the performance of the hydrostatic bearing system under unknown disturbance conditions. The experimental setup to perform the experiment is shown in Figure 8.

Overall structure of the proposed strategy based on IBSC and disturbance rejection controller.

Experimental setup of the traditional hydrostatic bearing controlled by capillary restrictor.
Disturbance rejection controller
The hydrostatic journal bearing is a pressurized oil feed bearing. In this, load is supported by a thin layer of fluid film, which is created by the external source of the pumping device. Disturbance rejection controller is a type of feedforward controller which is based on the dynamic behavior of the mathematical model of hydrostatic bearing with servo valve. Disturbance controller improves the stiffness of the oil film as well as load rejection performance. The dynamic behavior of the hydrostatic journal bearing is given by
Since disturbance is just like force, we will consider the term which involves pressure and convert pressure it into force. Finally, the derived disturbance rejection controller is given by

Integrator backstepping controller
In adaptive control theory, backstepping is one of the best techniques which was developed by Kokotovic
34
in 1990. Its purpose is to stabilize a nonlinear system by stabilizing the control law. Backstepping control has a recursive structure. So one can start designing from stable start and going back out a new controller that progressively stable each outer state. This designing process continues until the new stable state is reached. So due to the recursive structure this process is known as backstepping control. Here the integrator backstepping controller will be designed which can be used with

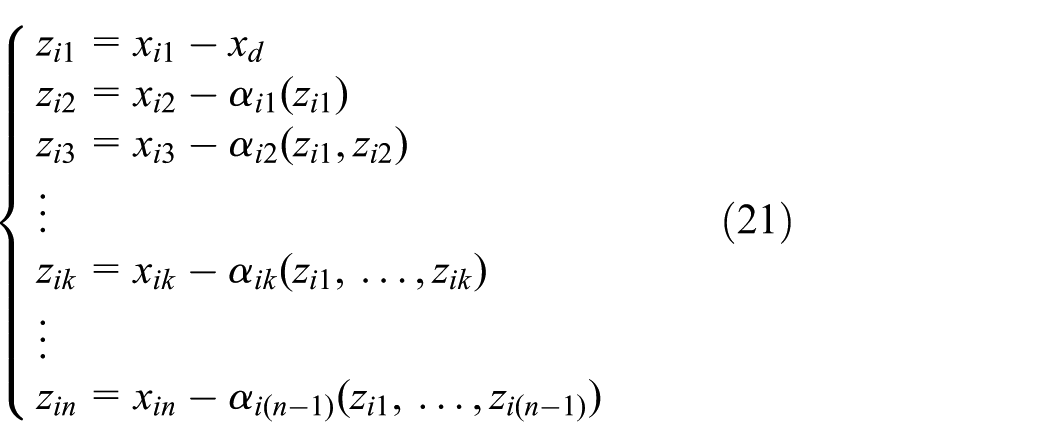
Suppose that the state variables are

where

Here the backstepping integrator controller will be designed for a hydrostatic bearing with
where
In backstepping control, the error is minimized with the help of Lyapunov technique so that the resulting system can guarantee position tracking error and hence ultimate convergence and boundedness. The

The
Remark
The system state error with new variable must converge to give stability for the system and the state error

where
Theorem
The active hydrostatic journal bearing controlled by servo valves will be stable if the following conditions are satisfied

where
Proof
Step 1. By considering

One can write equation (24) using equation (21) as

Construct the following Lyapunov function

The given Lyapunov function guarantees the stability of the control system if a virtual control law is

Then, one can easily obtain

where the cross-term products will be removed by the subsequent backstepping iteration.
Step

One can write equation (29) using equation (21) as

Construct the following Lyapunov function

The given Lyapunov function guarantees the stability of the control system if the virtual control law is

Then, one can easily obtain

Step n. By considering

One can write equation (34) using equation (21) as

Construct the following Lyapunov function

The given Lyapunov function guarantees the stability of the control system if the control law is

Then, one can easily obtain

Results and discussion
To verify the proposed controller, a hydrostatic journal bearing with four recesses and two servo valves is used. By implementing the conditions to integrator backstepping, one can obtain virtual control inputs

In practice, since a lot of unknown parametric certainties exist in the hydrostatic journal bearing system such as viscous damping coefficient, effective bulk modulus, density of oil, and coefficient of total leakage of the bearing, the elements of
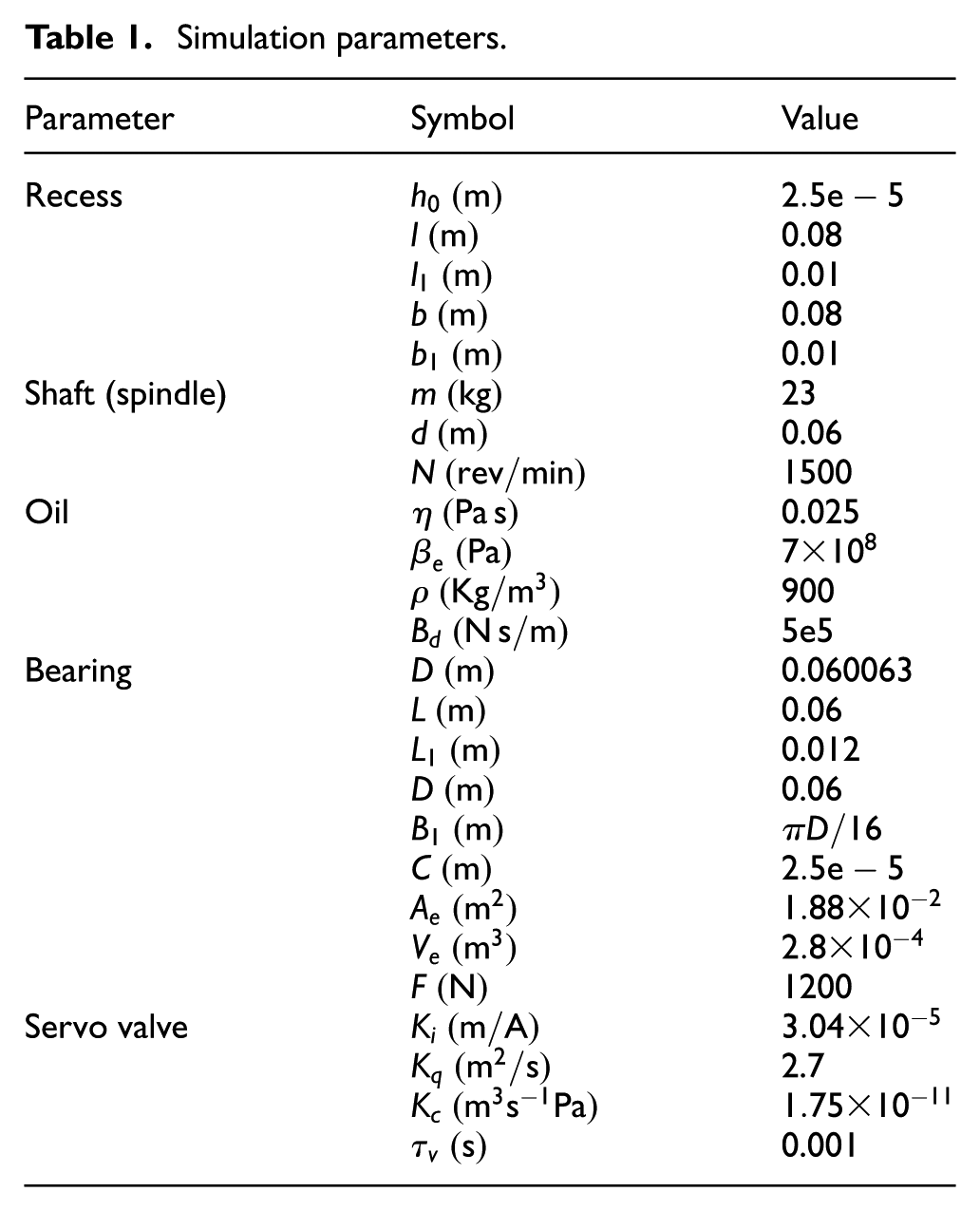
Simulations were carried out to check the pursuit and rejection performance of active hydrostatic bearing under different dynamic conditions using the parameters given in Table 1 and the results are given in Table 2.
Simulation parameters.
Influence of dynamic conditions on bearing clearance.
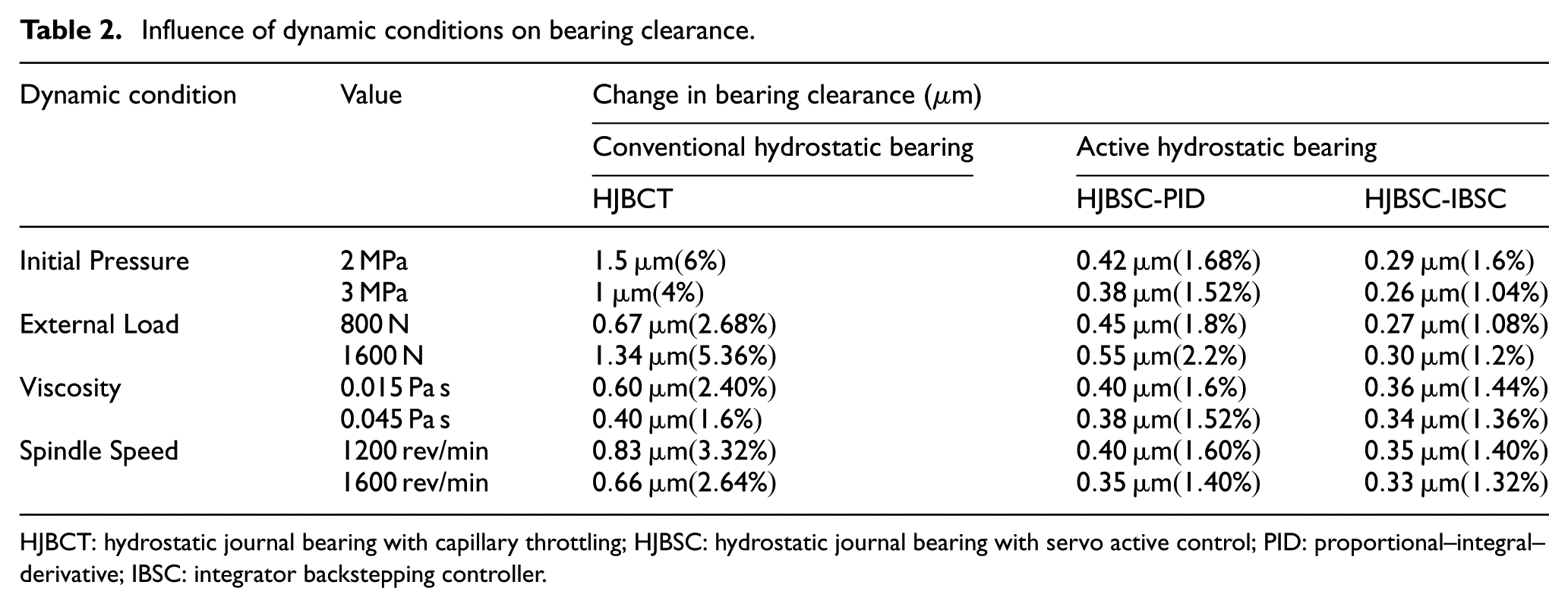
HJBCT: hydrostatic journal bearing with capillary throttling; HJBSC: hydrostatic journal bearing with servo active control; PID: proportional–integral–derivative; IBSC: integrator backstepping controller.
Influence of initial oil pressure
Rotary and rotational machinery always face high speed and heavy loading applications, which can be fullfilled using an active hydrostatic journal bearing. Oil pressure is the key factor for efficiency of externally pressurized active hydrostatic journal bearings, which not only affects the performance of bearing against load, but also helps bearing against wear and friction and provides high starting torque. In order to improve the performance of the active hydrostatic journal bearing, the effect of oil on its performance must be analyzed. To check the performance of the journal bearing with different initial oil pressures, experiments were performed with conventional hydrostatic journal bearings and the results were compared with the simulation results of servo-controlled PID and integrator backstepping control. The parameters used in the simulations are shown in Table 1. From the experimental results of a conventional hydrostatic journal bearing and simulation results of an active hydrostatic journal bearing, when the initial oil pressure increases, the gains of recess 1 and recess 2 decrease with the corresponding increases in the gain values of recess 3 and recess 4. However, it is found that by increasing the initial oil pressure there is an improvement in load rejection and stiffness characteristics of hydrostatic journal bearing. At 3 and 2 MPa, the changes in bearing clearance for coventional bearing are

Influence of initial oil pressure in HJBCT and PID-HJBSC.
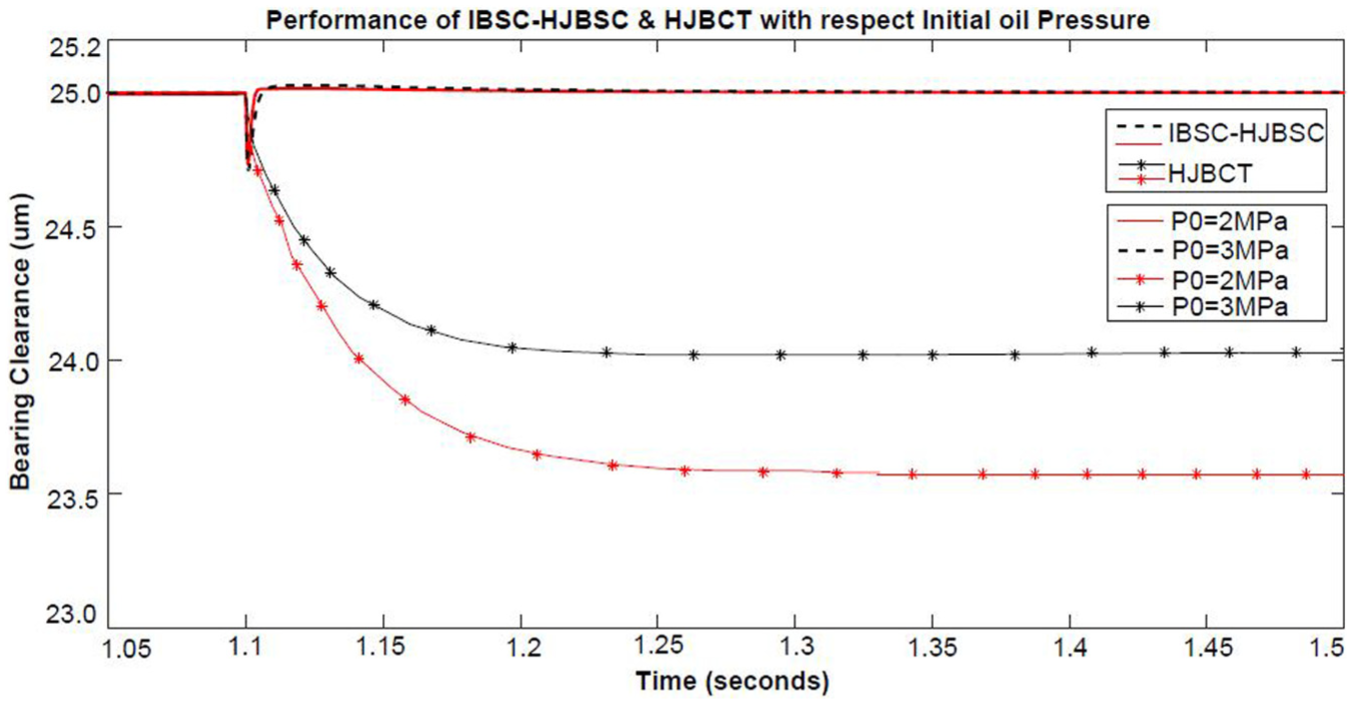
Influence of initial oil pressure in HJBCT and IBSC-HJBSC.
From the above figures, it can be seen that conventional hydrostatic journal bearing always settled down with some amount of offset (some value of eccentricity) and eccentricity never reaches zero under equilibrium positions, while active hydrostatic journal bearing always settled with zero eccentricity under equilibrium position due to servo feedback signal. The results show that the shaft of HJBCT deviates the central position and obtained a new equilibrium position. It is found that the dynamic stiffness of HJBCT increases by increasing the initial oil pressure and HJBCT obtains a new position under different external oil pressures and also its response time becomes shorter, while on the other hand before applying the external load the bearing clearance is
In order to check which of PID or IBSC is a better strategy for HJBSC, a comparison has been made which is shown in Figure 12.

Influence of initial oil pressure on PID-HJBSC and IBSC-HJBSC.
It can be seen from Table 2 that under the same initial oil pressure the change in bearing clearance for IBSC is less as compared to PID. It shows that under the same initial oil pressure the stiffness of HJBSC is more with IBSC as compared to PID and the response time of IBSC is faster as compared to PID to regain the equilibrium position so that shaft eccentricity is zero. Compared to PID, IBSC has less oscillation or fluctuation around the equilibrium position.
Influence of external loading
The spindle cannot reach an equilibrium position quickly after the load is being applied. It is due to the effect of throttling, mass of bearing components, inertia, and hydrostatic stiffness. There are two performance factors which show the efficiency of hydrostatic journal bearing against impact to achieve the new equilibrium position.
One factor is eccentricity and the second one is response time from one position to a new equilibrium position. The hydrostatic journal bearing with active lubrication has the ability to adjust the opening of the servo valve according to the real-time clearance of bearing and control the pressure inside the recess, which provide the system good stationary and rotational characteristics. To investigate the effect of external loading, the behavior of hydrostatic journal bearing is checked against different external forces such as 800 and 1600 N and the results for the active hydrostatic journal bearing and conventional hydrostatic journal bearing were compared and are shown in Table 2.
It can be seen from Table 2 that the simulation results of active hydrostatic journal bearing are better than the experimental results of conventional hydrostatic bearing, while the best results for active hydrostatic journal bearing are achieved under integrator backstepping approach. Change in bearing clearance versus load for IBSC is noted to be 1.08% and 1.2%, while for HJBCT it is noted to be 2.68% and 5.36%, respectively, which clearly shows a big advantage of active lubrication for hydrostatic journal bearing under modern model-based control techniques.
From Figures 13 and 14, it is found that when the external load acts at 1.1 s, the HJBSC shows more stiffness and better load rejection performance against impact as compared to HJBCT, and also HJBSC shows faster response to achieve an equilibrium position as compared to HJBCT. The amplitude of oscillation of HJBSC decreases quickly as compared to HJBCT and under equilibrium conditions the eccentricity of the presented HJBSC is zero as compared to HJBCT.

Influence of external loading on HJBCT and PID-HJBSC.

Influence of external loading on HJBCT and IBSC-HJBSC.
In order to further verify the performance of HJBSC, two strategies such as PID and IBSC have been presented. The external loads of 800 and 1600 N are applied at 1.1 s as shown in Figure 15. It is found that under the same loading conditions the stiffness of IBSC-HJBSC is more than that of PID-HJBSC. The response of HJBSC to regain the equilibrium position is faster with IBSC as compared to PID. So it shows that the proposed HJBSC works better than HJBCT and also the performance of HJBSC can be further improved using IBSC as compared to the PID strategy.

Influence of external loading on PID-HJBSC and IBSC-HJBSC.
Influence of oil viscosity
During operation, the bearing is completely separated from the surface of the journal through a pressurized film of oil. Due to oil film, hydrostatic journal bearing shows good properties of low friction, good damping performance, and high stiffness. Investigation shows that temperature has important effects on the viscosity of oil. When the shaft is running under high load and speed, it will produce a lot of heat which will change the viscosity of oil. So a lubricant under different temperature conditions can impose restrictions and reduce positional accuracy of the journal bearing. The proposed journal bearing with servo control has solved this problem as shown in Figures 16 and 17, indicating that a decrease in viscosity values with an increase in temperature does not affect much the HJBSC as compared to HJBCT.
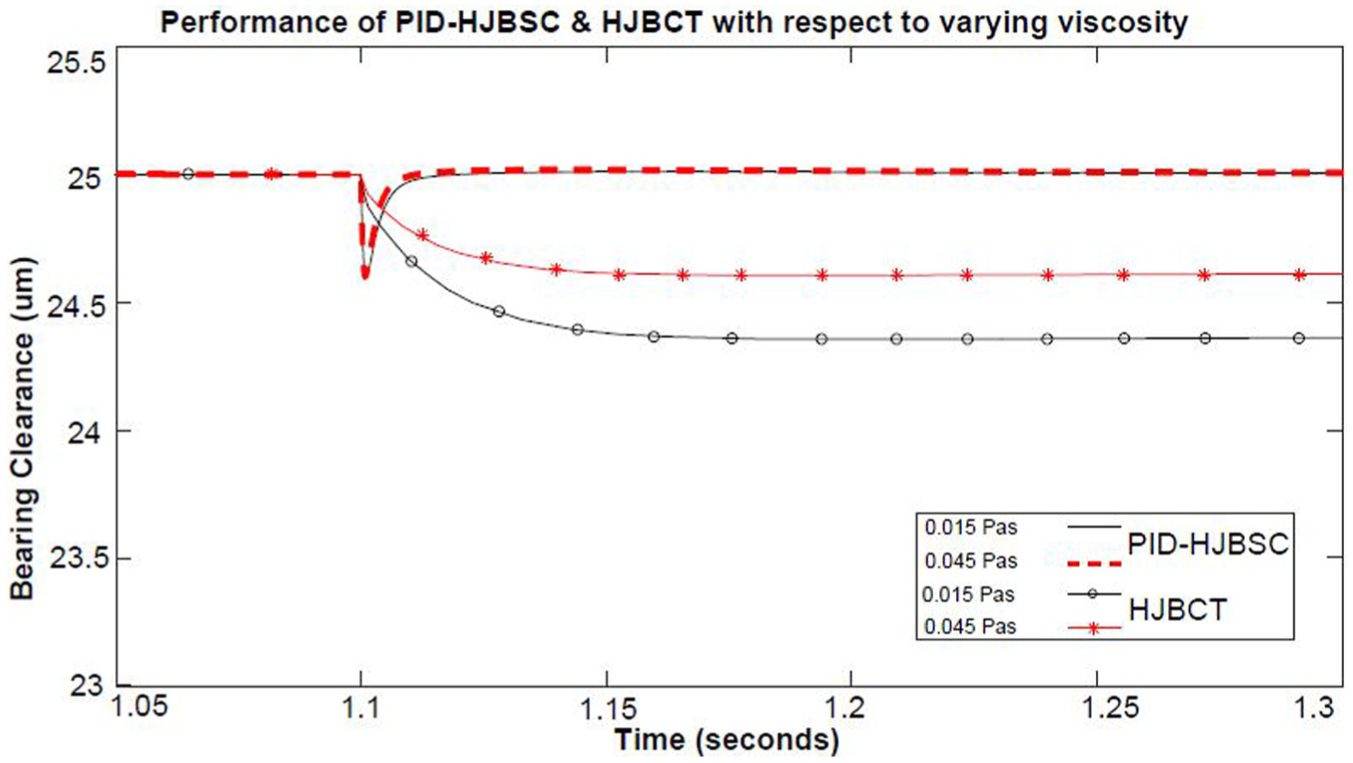
Influence of oil viscosity on PID-HJBSC and HJBCT.

Influence of oil viscosity on IBSC-HJBSC and HJBCT.
Influence of spindle speed
Whenever there is an offset distance (oil film thickness is not uniformly distributed), the squeezing effect comes into play which causes the oil film to oscillate. Traditional or conventional hydrostatic bearing has this effect much more prominent than an active hydrostatic bearing. The reason behind less oscillation for active hydrostatic bearing is that the servo valve in hydrostatic journal bearing under different conditions adjusts the oil film thickness in real time that allows HJB to regain the original equilibrium position, so this phenomenon reduces the effect of rotating velocity on journal bearing, while on the one hand the squeezing effect produces oscillation, on the other hand it has the advantage of improving the stiffness and load rejection performance of hydrostatic journal bearing. This effect can be seen clearly in the traditional hydrostatic bearing where there is a 0.68% improvement in load rejection performance by changing the speed from 1200 to 1600 rev/min. However, due to active throttling in active hydrostatic bearing, this phenomenon is less prominent which shows that the throttling effect is the main affecting factor which changes the performance of the HJB and also it can reduce the influence of squeezing and provide greater stability and threshold for the rotor–bearing system. The effect of rotating speed on HJB like an HJBCT is different from the effect of HJBSC as shown in Figures 18 and 19.

Influence of spindle speed on PID-HJBSC and HJBCT.

Influence of spindle speed on IBSC-HJBSC and HJBCT.
Conclusion
In this study, an efficient and concise mathematical model and a state feedback controller with disturbance rejection controller are proposed for a new type of hydrostatic journal bearing which consists of servo control. Disturbance rejection controller improves the disturbance rejection performance as well as removes the coupling effect. In order to verify the proposed strategy, real experiments were performed for active hydrostatic journal bearing, but the lack of experimental data led us to perform numerical comparisons. Comparison of active hydrostatic journal bearing with traditional hydrostatic journal bearing helps us to draw the following advantages of active lubrication: active bearings have better static and dynamic characteristics, they can adjust automatically oil film thickness (clearance gap) in a short time with feedback signal of position that ensures greater positional accuracy of shaft and good stability, they are less sensitive to rotational speed, and their eccentricity is zero under equilibrium conditions. It is observed that under the same external load the change in bearing clearance for active bearing is less as compared to conventional bearing. Furthermore, a new type of active hydrostatic journal bearing is checked under two different control strategies, and it is found that integrator backstepping control shows better results than PID. This work involves numerical results, while the future work will be to find out the deficiencies in the test bench so that the effectiveness of numerical results of active hydrostatic journal bearing can be proved experimentally.
Footnotes
Appendix 1
Handling Editor: Xianzhi Zhang
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by the School of Mechanical Engineering, Chongqing University. In addition, this work was supported by the National Natural Science Foundation of China (Grant No. 51075409).