
Abstract
To satisfy the increasing demand for improving productivity while reducing pollution, this article proposes a method to determine the minimal mulch film damage in mechanical transplantation operations, which can be used to guide the design of all the up-film transplanters. Specifically, the whole working process of digging the hole for a typical dibble-type transplanter working in Xinjiang province of China is analyzed, in which the dibble motion serves to illustrate the effectiveness of the proposed method. Both the ideal condition and the realistic environmental force-involved condition are taken into consideration during analytically modeling the process of the mulch film damage. Based on the presented two-layer soil-layered model and basic motion principles, a series of equations is derived to describe the typical dibble-type transplanter motion involved gravity and soil counter-force. Furthermore, the derived relations between working parameters and structural parameters of the transplanter guide the search of a minimum value of the mulch film damage. Finally, simulation results verify the effectiveness of the presented theoretical calculation. More remarkably, the dibble motion in the preliminary field trial is similar to that in the simulations. The obtained results provide a new way to deal with the optimal design and operations of novel up-film transplanters.
Introduction
In recent years, advanced mechatronic systems and robotic technologies are increasingly being used in primary industries such as agriculture, forestry, and fisheries. Practical applications of advanced technologies are contributing to the enhancement of the quality of primary industries, typically involving improved productivity, cost-effective management, and reduced pollution. In the agriculture sector, the seedling transplanting is an efficient means to increase the yield for it to offer a shorter growing season, higher survival rate, and stronger lodging resistance. 1 However, the seedling transplanting is a heavy physical labor, which hinders the promotion. A transplanter is an agricultural machine used for transplanting seedlings into the field, which greatly facilitates farming with increased productivity. Many countries have shown a keen interest in the development of a variety of mechanical transplanters,2,3 ranging from semi-automatic 4 to automatic.5–10 At present, mechanical transplants are quite qualified for seeding tomatoes, strawberries, nursery stock, and so on.
It is generally thought that no universal transplanter exists. The mechanical structures of the transplanters differ greatly since there are many means to achieve the goal. For example, a planetary gear train with elliptical gears and an incomplete non-circular gear are used for rice plug seedlings, 11 while a planetary five-bar structure of transplanting mechanism is designed to transplant seedlings on mulch film. 12 Besides, there are many differences between the agriculture machine and the in-door machine, such as the working condition, working time, and manufacturing cost. The transplanter is usually used intensively in the working season and stored in the farm slack season. It implies that the transplanter should be reliable, easy-maintenance, and low-cost. In addition, another important reason for this non-generality is that the design of a transplanter tightly depends on various field conditions. For instance, the rice transplanter is extensively used in paddy fields,13–15 but not suitable for dry-land transplanting.
Although there are many kinds of transplanter which can be used for dry-land transplanting,16,17 what attract us most to the up-film transplanter is the ability to save water resources. For instance, in Xinjiang, China, like other dry areas, the plastic mulch film is wildly used for water saving, which makes the up-film transplanter the best choice for transplanting. However, there is a problem with the transplanting operations, in which the up-film transplanter may cause undesirable damage to plastic mulch film. In reality, large plastic mulch film damage generally influences the effect of the mulch film in certain aspects such as soil insulation, precise management of soil moisture, and weed control. 18 Although a parameter combination for the particular transplanter achieving satisfied degree of the mulch film damage may be figured out through experimental research, a universal method is still missing to determine the structural parameter of a transplanter with the minimal mulch film damage.
In this article, the objective is to numerically model and analyze the mulch film damage of a typical dibble-type up-film transplanter. With this model, the relationship between the structural features of the transplanter and the mulch film damage can be established via quantitative analysis with different conditions. Both simulations and tests are offered to show the effectiveness of the proposed method to determine the minimal mulch film damage. The novelty and contribution of this article lies in three aspects: (1) a strategy for dealing with the mulch film damage is proposed, which can be adapted to all kinds of up-film transplanters; (2) a two-layer soil-layered model is developed to show the effect of environmental force quantitatively; and (3) the quantitative relations among working parameters, mechanical parameters, and the value of the minimal mulch film damage are determined. The kinematic model describing the dibble’s motions is derived and verified. In particular, both the ideal condition and the environmental force-involved condition are comparatively discussed. The obtained results shed light on the optimal design and operations of novel up-film transplanters.
The remainder of the article is organized as follows. The proposed strategy is briefly introduced in section “Strategy for dealing with the mulch film damage.” A quantitative relationship between the machine features of a typical dibble-type transplanter and the minimal mulch film damage under ideal condition is built in section “Minimal mulch film damage in ideal condition.” The analysis of dibble motion in conjunction with the influence of environmental force is detailed in section “Minimal mulch film damage considering the environmental force.” Results from simulations and field tests are provided in section “Results and analysis.” Finally, section “Conclusion” concludes the article with an outline of future work.
Strategy for dealing with the mulch film damage
To obtain the minimal mulch film damage, the whole working process of digging the hole is studied to figure out how the mulch film damage is formed. The process of manual transplanting work is illustrated in Figure 1. As for a typical working process, the farmer first digs a hole, transplants the seedling, moves ahead, and repeats the previous actions. In such a way, the seedling suffers no impact and there is no extra mulch film damage. The whole transplanting process, in general, can be divided into two basic motions: one is the intermittent motion in the vertical direction, drilling holes; the other is the horizontal movement, moving forward. The trajectory of the dibble motion is shown in Figure 2, where h denotes the planting depth, and S indicates the planting distance. Ideally, the up-film transplanter should exactly execute human-like actions without extra mulch film damage. However, the working performance would be inefficient for the frequent starting and braking during the operations. To overcome this problem, the trajectory needs some change. Because the dibble makes no damage to the mulch film while they are not contacted, the transplanting process can be described below. When the transplanter moves forward uniformly, the dibble drills intermittently and has a trajectory where the beneath-film part is approximate to a straight line perpendicular to the ground. By this way, both the efficiency and the zero extra mulch film damage can be satisfied. The trajectory of the dibble motion can be plotted as Figure 3.
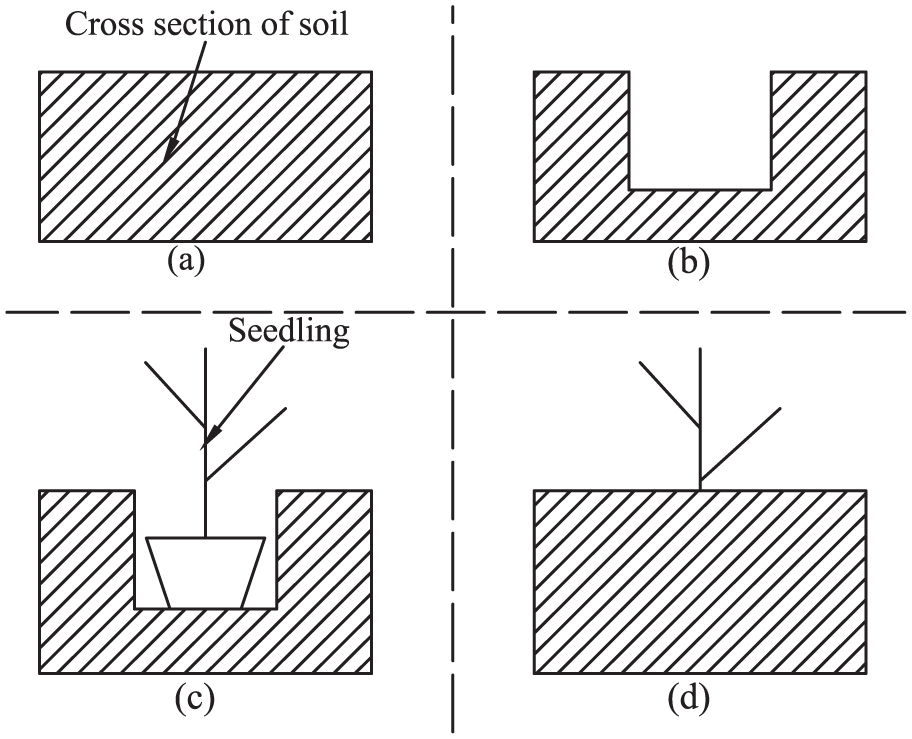
Process of manual transplanting work: (a) non-work status of soil, (b) dig a hole, (c) put the seedling into the hole, and (d) cover soil on the seedling.

The ideal dibble motion trajectory causing zero extra mulch film damage.

A possible trajectory of the dibble motion.
Although the portrayed motion seems easier to achieve, it is unrealistic in the context of mechanical engineering. The trajectory in Figure 3 indicates that the dibble should perform a round-trip rectilinear motion in a very short time, corresponding to very high acceleration. The acceleration of the dibble not only imposes a burden to the transplanter but also possibly impacts the seedlings. To reduce the acceleration, the restraints on the dibble motion are relaxed. Thus, the whole motion can be simplified as below: when the transplanter moves forward uniformly, the dibble performs the intermittent drilling motion and intends to obtain the minimal plastic mulch film damage. The possible trajectories shown in Figure 4 are more feasible. Intuitively, different damage degrees are relevant to different trajectories. To verify this hypothesis, the minimal mulch film damage will be defined and the direct relationship will be developed in the following section.

Possible trajectories of the dibble motion.
Minimal mulch film damage in ideal condition
Introduction of a typical dibble-type transplanter
Before going into the relation between structural parameters of the transplanter and the mulch film damage, a specific object should be chosen to begin the study. To date, a variety of mechanical structures of up-film transplanter have been developed.12,19,20 For the convenience of the real-world applications, a kind of up-film transplanter which is widely used in Xinjiang province of China is selected, whose structure diagram is depicted in Figure 5. More specifically, the core mechanism of the dibble-type transplanter is the parallel four-bar mechanism. The eccentric disk, the driving disk and the square shaft act as the bars. They ensure that the dibble is vertical to the ground so as to avoid impact of the seedling during the transplanting. When the transplanter moves forward uniformly, the rotated driving disk and the eccentric disk drive the dibble to implement the desired intermittent digging.

Illustration of mechanical structure of a dibble-type transplanter.
Mathematic model of the dibble motion
To model the dibble motion mathematically, the Cartesian coordinate system is established with the forward direction as the positive direction of x axis and the vertical direction upward to the planting ground as the positive direction of y axis. In particular, one of the lowest points of the dibble trajectory is set as the original point. Further let the lowest point of a dibble be the reference point, the dibble motion can then be mathematically described as follows

Mulch film damage determined by the dibble motion
To simplify the problem of determination of mulch film damage, the dibble is considered as a shapeless line always perpendicular to the ground, so that the mulch film damage degree can be calculated by the distance of the dibble movement. Figure 6 shows trajectories of the dibble with different transplanting speed ratios
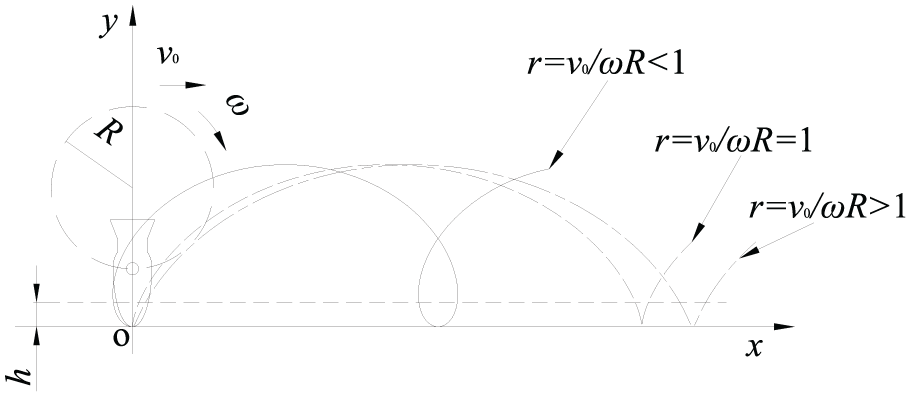
Trajectories of the dibble under different conditions.
Specifically, when to discuss the condition of

The mulch film damage relevant to the dibble motion: (a)

Calculation of the mulch film damage.
Given the definitions of

The half damage on the horizontal line of h can be calculated as

where


Taking account of the symmetry of motion trajectory, we have

Set equation (6) equal to 0, the satisfied point is obtained

Substituting equation (7) into equation (1), it yields that when

Furthermore, a combination of equations (3) and (8) leads to the estimation of the minimal mulch film damage. By observing the sign difference, we have

which means that the value of the minimal mulch film damage is equal to
Because r has a corresponding value for every given value of k, equation (9) can further be simplified. A curve fitting of k and r is made using the fzero function and cftool command provided by MATLAB, giving an approximately quantitative relation between r and k as equation (10). The curve fitting result is shown in Figure 9.


Illustration of the curve fitting between r and k.
Substituting equations (4) and (5) into equation (10), the following relation can be derived

In reality, equation (11) offers a numerical relationship between
Minimal mulch film damage considering the environmental force
Introduction of the environmental force
All the above discussions are based on a simple fact ignoring the gravity and other forces, failing to accurately reflect the real situation. As a matter of fact, digging deeper needs larger force. Therefore, if the gravity of the transplanter remains constant, the machine would always balance at a certain depth level.
Based on the above analysis, the soil model in the simulation can be divided into two parts: one part, called soft layer, is between the mulch film and the balance plane; the other part, called solid layer, is beneath the balance plane. The soft layer has no impact on the dibble’s motion trajectory, only reflecting the transplanting depth. However, the solid layer is so hard to penetrate that the dibble can only move on the balance plane. According to the simulation result shown in Figure 10, the trajectory of the dibble has changed dramatically with the environmental force involved. Hence, it is necessary that some adjustments should be made to assess the minimal mulch film damage theory. Specifically, the mathematic model of the new dibble motion law is first derived. Second, the mulch film damage is combined with the model. At last, the minimal mulch film damage is defined and calculated.
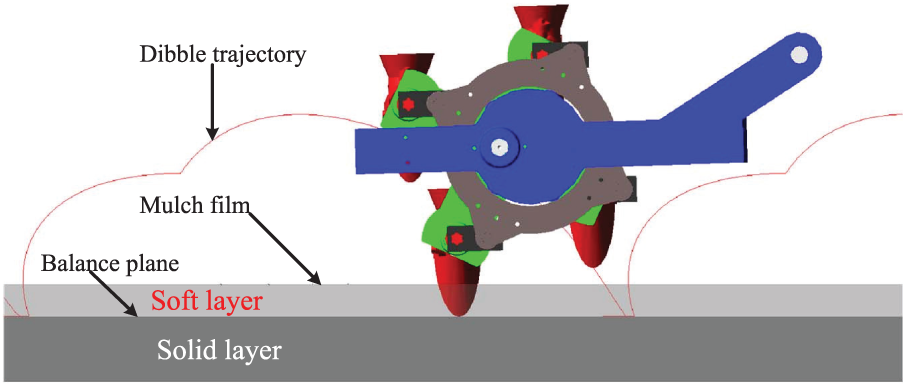
A simulation result involved with the environmental force.
Analysis of the component of the dibble motion
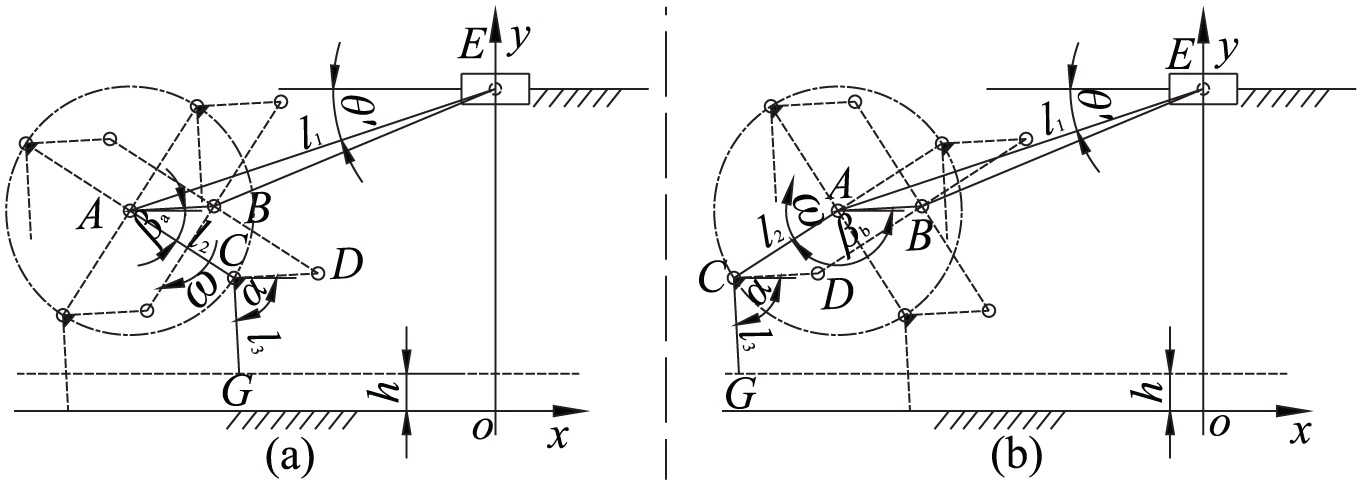
To highlight the quantitative relationship between the structural parameters and working parameters, Figure 11 gives a simplified schematic diagram of transplanting mechanism. Likewise, the whole mulch film damage is divided into two parts. Because of the existing force, there must be always one dibble or two dibbles contacting with the balance plane to counterbalance the gravity. This implies that the on-film damage caused by the middle dibble has begun with the left dibble contacting with the solid layer, then finished with the right dibble balancing the force. The beneath-film damage is calculated by the distance that the chosen dibble moving on the balance plane. A similar strategy of decomposing the whole dibble motion into horizontal and circular movements is still working. The dibble circular movement involved with the force will be analyzed below, for the reason that the force merely influences the circular movement.

The simplified kinematic model of the transplanting mechanism: (a) an arbitrary position of the model and (b) a special position of the model.
For convenience, the balance plane maintains consistent with the no-force condition, as shown in Figure 11. Then, trigonometric equations can be derived as follows


Assuming that the rod AE clockwisely rotates an angle of



The relations between the angle velocities of these rods can further be expressed as equations (17) and (18)


According to equations (17) and (18), the final solution is given by

By taking a derivative with respect to t, equation (20) can be deduced from equation (12)

Substituting equation (19) into equation (20), we obtain the following equation

In practice, equation (21) is hard to use for the reason that


Two special positions of the transplanting mechanism: (a)
Since equation (23) is well known, 21 substituting equation (22) into equation (12) yields

where



For the sake of simplicity, the condition of
Analysis of the mulch film damage caused by the dibble motion
Building the relationship between the mulch film damage and the dibble motion is not an easy task under the environmental force condition, since there are several time-varying parameters involved. To tackle this problem, we divide the whole forming process of the mulch film damage into several parts and then give detailed discussions about them separately.
Forming time of the mulch film damage
As a first step to calculate the mulch film damage, we should know the time interval during which it is forming. According to the definition of the beneath-film damage, it is just the distance that the rod CG moves on the balance plane, meaning that the time interval is the minimal positive period of the function. Specifically, two special positions are examined in determining the on-film damage. As schematically shown in Figure 13, the CG rod rotates from one special position to the other, with the same condition

Two special positions for calculation of the on-film damage: (a) beginning position of the on-film damage and (b) ending position of the on-film damage.
The values of

Combining equation (28) with equations (12) and (29) yields



where

According to equation (22), the time spent on the process where the CG rod moves from the position where

Similarly, the time spent on the process where the rod CG moves from the position with

Thus, the total forming time of the on-film damage becomes

where

According to the prior analysis,
Forming velocity of the mulch film damage
It is a tough task to calculate the exact distance traveled by the point G in that the velocity of the point G is not regular. Figure 14 illustrates the velocity components of the point G. According to the theory of composition of velocities, the following relation holds

Here,

where


Velocity components of the point G in the forming process of on-film damage: (a) velocities at the beginning of the process and (b) velocities at the end of the process.
During the whole time

In the second and third phases, the angles

According to equations (39), (41), (42), and the definition of time t, the calculation of


Definition and calculation of the minimal mulch film damage
The horizontal displacement of the point G in different phases can be obtained via equation (44), given by the integration of equation (43). The on-film damage can then be calculated by

It is worth noting that the value of

In addition, the exact value of
Results and analysis
To evaluate the proposed method to determine the minimal mulch film damage caused by the up-film transplanter, simulations and field tests have been performed. Specifically, we have created a three-dimensional (3D) model of the up-film transplanter in automatic dynamic analysis of mechanical systems (ADAMS), allowing extensive analysis capabilities of the dynamics of moving parts. The basic feature parameters for the up-film transplanter are set as follows:
Parametric setting and results of the simulation.
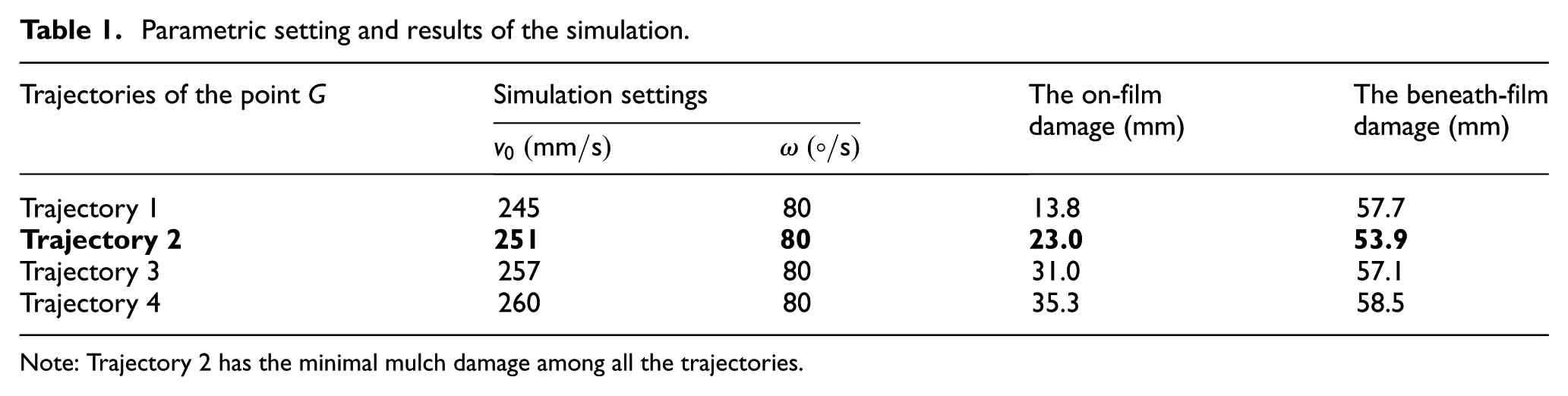
Note: Trajectory 2 has the minimal mulch damage among all the trajectories.
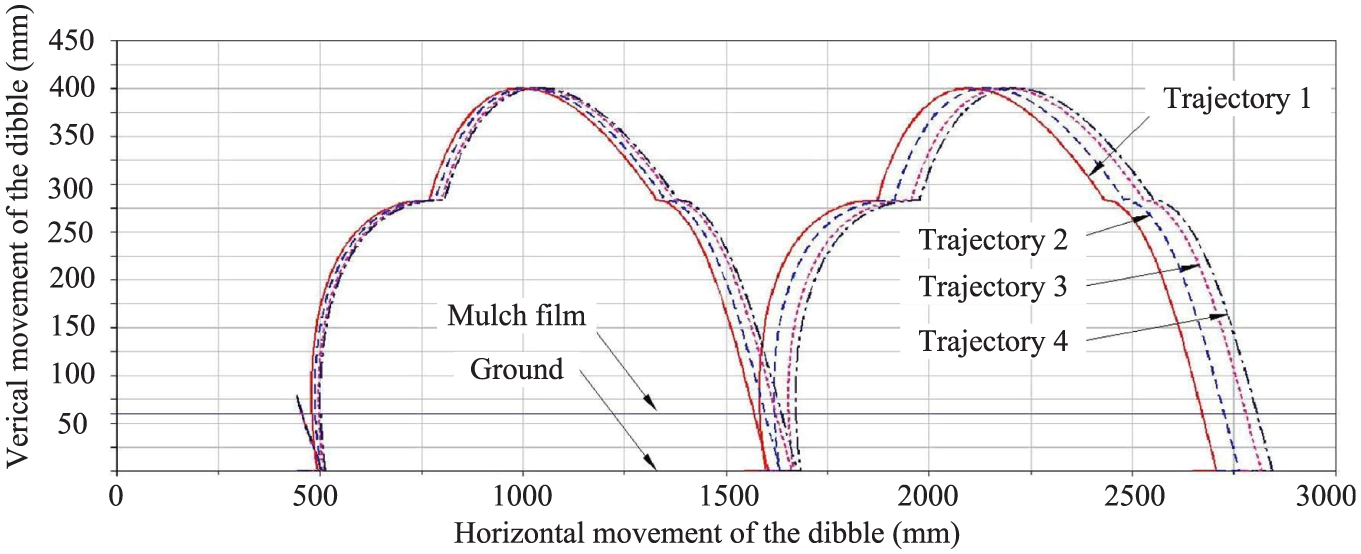
Trajectories of the point G under different settings.

A preliminary field trial: (a) prototype of the developed dibble-type transplanter and (b) scenario of transplanting operation.
The main simulation and test results are summarized as follows: first, the presumption that the whole mulch film damage is decided by the beneath-film damage is confirmed, because the on-film damage is much smaller than the beneath-film damage (see Table 1). Second, the comparisons between Trajectory 2 and other trajectories reveal the effectiveness of equation (46). Furthermore, the comparison between Trajectory 2 and Trajectory 3 verifies the necessity of the adjustment, for the value of
Conclusion
In this article, we have examined influencing factors of the mulch film damage caused by a typical dibble-type transplanter. The proposed strategy for solving the minimal mulch film damage problem is as follows: first, the dibble’s motion is expressed in the form of mathematical model and then the relation between the motion and the mulch film damage is figured out, and finally, the minimal value of mulch film damage is estimated. The minimal value can be easily calculated in the ideal condition, whereas the situation turns complex in the realistic environmental force-involved condition. Hence, a two-layer soil-layered theory is proposed to simplify the problem so that the quantitative relations among working parameters, mechanical parameters, and the value of the minimal mulch can be determined. Simulations and preliminary field tests show the effectiveness of the presented theoretical analyses. From the simulations, it can be concluded that it is possible to model the mulch damage process effectively and obtain good results. This suggests that there is potential in reducing the mulch film damage using mechanical and control measures during transplanting operations.
The future work will focus on several aspects. In this article, the main motivation is to figure out the relationship between the mulch film damage and the dibble motion, so some unrelated factors are simplified or omitted. For instance, the dibble shape is simplified as a shapeless line always perpendicular to the ground, but the dibble shape actually has some connection with the mulch film damage. Besides, to what extent does the tilt angle of the dibble during transplanting influences the mulch film damage still remains unknown. Also, the soil model merely consisting of two layers can be extended to more layers with different characteristics. Of course, more thorough experimental investigation on the newly developed up-film transplanter is demanded for better support.
Footnotes
Appendix
Handling Editor: Jan Torgersen
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was financially supported by the National Science Foundation of China (nos 61763042, 61663042, and 61725305).