
Abstract
Delay is a major challenge in teleoperation. To teleoperate a robot in real-time with specific human motion such as walking, prediction and compensation algorithms are needed to minimize the tracking delay. Human walking possesses the inherent features of synergy and quasi-periodicity with nonlinearity. By analyzing these features, three prediction methods were designed. A delay-coordinate phase space reconstruction method is based on the delay embedding theorem and uses the historical data. The echo prediction method uses data from the coupling joints of the other body side and takes the Euclidean distances in the delay-coordinate phase space reconstruction method for data search and match. The fused prediction method combines the delay-coordinate phase space reconstruction and echo prediction methods, uses the best matching historical data of the same joint and the corresponding joint of the other limb. These methods were implemented for teleoperation of an exoskeletal robot with inertial measurement unit measurements of human walking. The predicted trajectories were used to compensate the teleoperation delay and improve the robot tracking performance. Experimental results demonstrated that the fused method brought apparent improvement over other methods and can serve as a promising solution for time delay estimation, prediction, and compensation of human walking tracking and teleoperation.
Keywords
Introduction
Teleoperation of exoskeletal robots is an essential approach for rehabilitation and many other applications. For patients that suffer from neurological injuries and resulted functional disabilities, they need help on body limbs movements and trainings. Complex tasks such as human walking require multi-joint coordination, are functionally difficult and physically challenging for both the therapists and patients. Furthermore, the limited number of experienced therapists and increased rehabilitation training need necessitate remote rehabilitation. These strong needs motivate the teleoperation of lower limb exoskeletal robots.1–5
Mechanical motion capture systems are often used in early days6,7 and brain machine interface is emerging. 8 The motion capture systems composed of inertial measurement units (IMUs) have many attractive advantages. They are technically sound, reliable, economically efficient, informative, can be made compact and light weight. Furthermore, they are wearable and do not obstruct human movements. Although the accuracy is often lower than mechanical systems, it is sufficient for human motion capture such as walking tracking. Therefore, IMU-based motion capture systems have come to be a feasible and popular solution.9–13
Tracking strategies such as force tracking and trajectory tracking have been widely used. 14 Trajectory tracking is inherently more stable and robust and has been widely used for various industrial applications. The force tracking by itself bears some complications and limitations. 7 One main challenge for force tracking is that a precise dynamic model of the operator is needed to obtain the required force. However, it is inevitable that delay happens when the kinematic data of the operator captured by IMUs are obtained, processed, transferred to the robot to be implemented. Delay compensation for joints’ motion is intuitively exploited with different prediction methods.
Human walking is a quasi-periodic process exhibiting certain chaos features, 15 which indicates the nonlinear characteristics of human musculoskeletal dynamic systems. During walking, the two lower limbs operate with synergy.16,17 These features inspire motion estimation, prediction, and compensation methods of this research.
Based on the synergy feature of human walking, echo control has been proposed and applied in powered prosthesis by many researchers.18,19 This method generates joint’s trajectories of one limb by a phase shift of the other limb during human walking. 20 However, problem exists in how to determine the time shift. As an improvement of echo control, the complementary limb motion estimation (CLME) method 21 assumes a coupling relationship between two lower limbs. The regression method has significant influence on performance and should be carefully determined. 22 Based on the quasi-periodic nonlinear dynamic feature of human locomotion, the delay-coordinate phase space reconstruction (DPSR) method originating from Takens’ Reconstruction Theorem is a widely used method for nonlinear time series dynamic factor analysis. This can be used to predict the trajectories,23,24 but such method requires historical data prior to a reasonable performance. There are also other prediction and compensation methods, such as the autoregressive integrated model method, autoregressive integrated moving average method, autoregressive moving average model method, 3 modified recursive least square method, 4 neural network-based method.25,26
Here, in this work, a novel method for prediction and compensation of human walking has been proposed based on the fusion of the echo prediction and DPSR prediction methods and then implemented for teleoperation of a lower limb exoskeleton robot. Experiments have been conducted to examine the feasibility and efficacy of the proposed method and to compare with the echo control and DPSR methods.
The paper is organized as follows. Section “The teleoperation system” introduces the exoskeletal robot teleoperation system. Section “Delay prediction and compensation methods” describes the echo control method, DPSR method, and our fused method. Section “Experiments and results” shows the implementation, experiments, and results. Finally, section “Conclusion” concludes this work.
The teleoperation system
The teleoperation paradigm from human walking to the exoskeletal robot is illustrated in Figure 1. The developed motion capture system based on IMUs is shown in Figure 2. The attaching structures are designed to fit the shape of human lower limbs with Velcro straps. The execution robot is the PXMZ1 lower extremity exoskeletal robot developed by Xeno Dynamics Co., Ltd., which consists in total of 10 DoFs. Four actuated joints (extension/flexion of knees and hips) are included in its sagittal plane and six passive joints (adduction/abduction and rotation of hips and flexion/extension of ankles) are fixed during experiments. The robot is fixed on a test jig via its wrist, as shown in Figure 3. The human operator walks on a treadmill equipped with the motion capture system. During operation, the hip and knee joints’ motion of the robot tracks that of the human in sagittal plane with data collected by the IMU-based motion capture system. The robot joints’ motion data could be collected with its own encoders simultaneously.

The teleoperation paradigm from human walking to the exoskeletal robot.
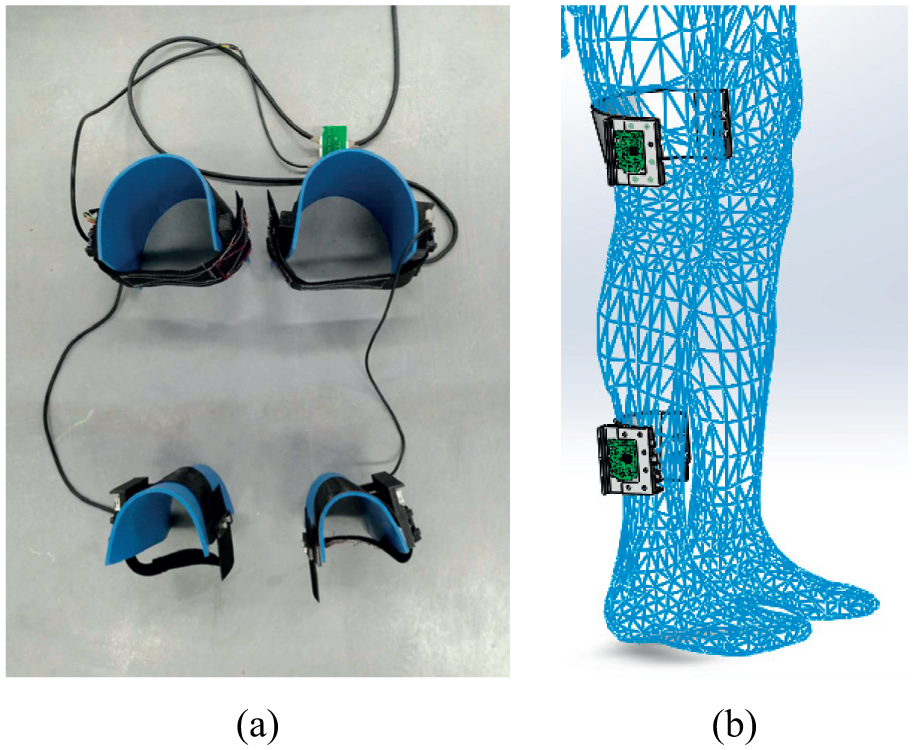
The IMU-based lower limb motion capture system: (a) IMU-based measurement hardware and (b) illustration of attachment to human.
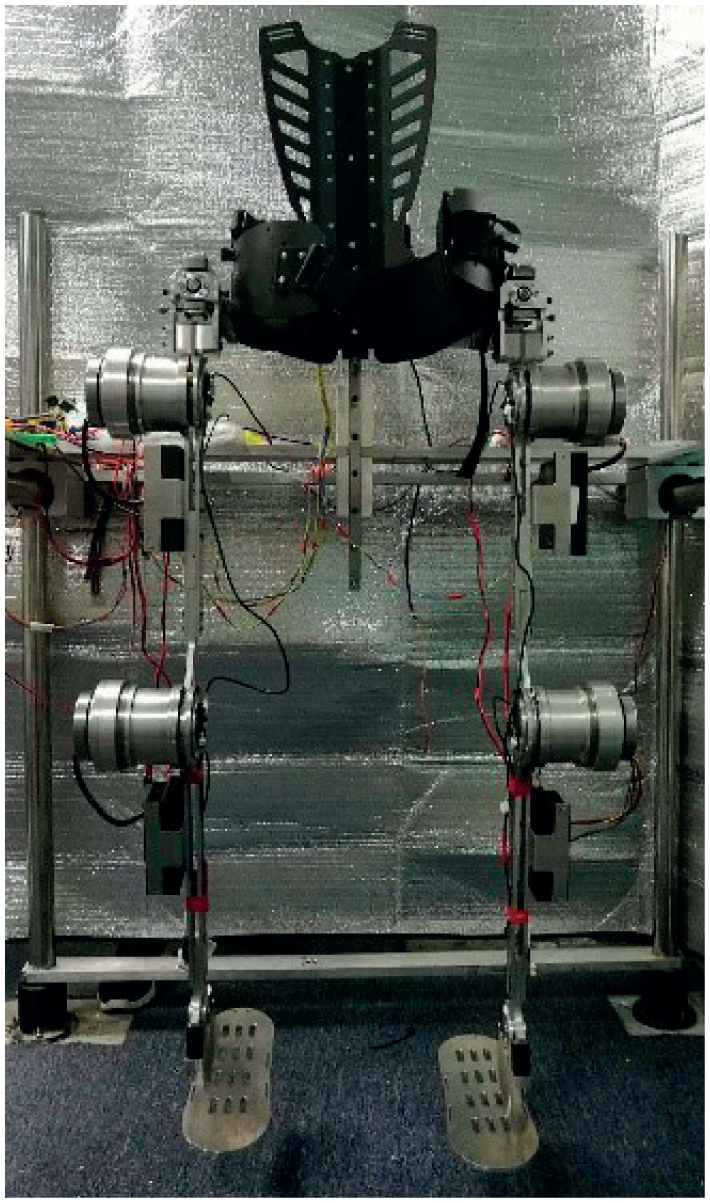
The PXMZ1 lower extremity exoskeletal robot in experimental configuration.
Delay prediction and compensation methods
The DPSR prediction method
Human locomotion has the inherent quasi-periodic and nonlinear dynamic feature, and the DPSR method can be adopted to predict the joints’ trajectories of the human lower limbs. According to Takens’ Reconstruction Theorem, it is possible to reconstruct the dynamics of a nonlinear system based on its previous measurements. A current embedding vector, also called reconstruction vector, is extracted by incorporating p past observations with a time delay of h sampling instants between subsequent components

where t is the current sampling time point. The algorithm proposed by Herrmann 24 is illustrated in Figure 4.

The DPSR prediction workflow.
At each sampling time point t, an current embedding vector

with the weightings

and

The echo prediction method
Inspired by the mathematical idea that the Euclidean distances can be used in the DPSR method to search and match the data, the echo prediction method based on the coupling relationship between the left and right lower limbs has been proposed, as shown in Figure 5. The current embedding vector

The echo prediction workflow.
Here only one best matching embedding
The fused prediction method
The fused method combines the best matching historical trajectory data of the same joint and the corresponding joint of the other side lower limb. It is expected that the fused trajectories predicted would be more accurate, and the method would be faster to converge and more stable during the unstable conditions than the previous elaborated methods. The fused prediction method is described in Figure 6.

The proposed algorithm based on the fusion of DPSR and echo prediction.
As previously described in the last two methods if the best matching embeddings

The question evolves into how to decide the two weightings in a dynamic and reasonable manner. It is not reasonable to decide the weightings based on the predicted positions only, so the current embedding vector forms two vectors,

The construction of extended vectors and their correlation calculation.
The correlation values,

and

respectively. And the k-step prediction is determined by equation (5).
Delay compensation
The estimated delay time

Delay time estimation and compensation.
Experiments and results
Experimental design
Four experiments were carried out, one as baseline and three with different prediction compensation methods implemented. During the experiments, the exoskeletal robot was fixed on a stationary frame with its operator walking parallel on a treadmill. The actual experimental scenario could be seen in Figure 9(a). The acquisition frequency and control frequency were both 50 Hz. Each time a dataset of the left hip, right hip, left knee, and right knee joints’ angle in sagittal plane of the robot and test subject with a length of 90–100 s was collected simultaneously. The human motion data were collected by the IMU-based motion capture system. The robot motion data were collected with its encoders. The hip and knee joints’ angles used in this research are defined as seen in Figure 9(b). Before the experiments, static calibration was done to ensure the IMU measured human joint angles and the robot encoder measured joints’ angles in the sagittal plane were the same.

Experimental configurations: (a) experimental scenario and (b) human hip and knee joint’s angles collected during experiments by the IMU-based motion capture system.
The data collection included five typical walking segments: walking initiation, stable walking at 0.8 km/h, speed transition from 0.8 to 1.4 km/h, stable walking at 1.4 km/h, and walking termination. The performance during initiation, transition, and termination decides whether the prediction methods are applicable to real human walking and this is one key evaluation criterion of algorithm excellence. Specially, the baseline data with five segmentations were demonstrated in Figure 10.

Baseline joints’ trajectories without compensation marked as five segments: (a) left hip, (b) left knee, (c) right hip, and (d) right knee.
Assessment measures
To quantify the algorithms’ compensation performance, the prediction ratio (PR), tracking ratio (TR), and overall compensation ratio (OCR) were selected as metrics.
24
PR represents the prediction errors between the predicted human joints’ trajectory

where

TR represents the tracking errors between the predicted human joints’ trajectory

where

OCR represents the overall errors between the predicted human joints’ trajectory

where

Baseline results
The experiment without compensation was conducted as the baseline, which presented a delay of 40–60 ms approximately at the speed of 0.8–1.4 m/s (see Figure 11(a)). Such delay mainly came from the communication and response frequency of the motor controllers, the motors’ driving ability, and the actuation modules’ dynamic characteristics. The delay of the whole process was unidirectional and the highlighted segments of the knee joints’ trajectories in Figure 11(a) exhibited much longer delay. The reason was that the execution delay always existed and the robots’ knee joints could hardly meet the performance requirement during the highlighted time. Thus, PR and TR were needed to quantify the performance of prediction and execution separately during the compensation process.

Typical cycle of walking during stable stages by different methods: (a) baseline, (b) DPSR method, (c) echo method, and (d) fused method.
For the baseline experiment, the collected human joints’ motion data were sent directly to the exoskeletal robot for execution. As the human trajectories were
Performance of different methods comparing with the baseline.

PR: prediction ratio; TR: tracking ratio; OCR: overall compensation ratio; DPSR: delay-coordinate phase space reconstruction.
Results with motion prediction and delay compensation
During the implementation of all the proposed methods, the maximum number of steps to be predicted was set to be three. This meant they were capable of compensating a delay of less than 60 ms, as the sampling interval of the motion capture system was 20 ms. The embedding vectors had a length of 30 steps. A 250 steps history data which was 10 steps away from the current sampling instant was adopted to generate historical embeddings. The delay of the exoskeletal robots’ joints was hard to identify visually comparing with the whole time range, so in the following content typical segments were displayed rather than the whole series of data.
Figure 11 shows that the echo and DPSR methods could fill the time lag between the exoskeletal robot and its operator, but the predicted trajectories were not as accurate as the human original motion. This was especially evident in the highlighted segments of Figure 11. Although phase lead could always be observed while the echo and DPSR method applied, phase lead was not the intention of the system application. The fused method predicted trajectories were smoother and more accurate and the compensation provided very close tracking of the original human motion.
According to Table 1, the DPSR and echo methods did not present advantages over the baseline data. On the contrary, the echo method performed worse. The reasons were as follows:
The prediction error of the baseline experiment came only from the gap of 40–60 ms and the profile was exact. This resulted a very high PR value for the baseline experiment.
The predicted trajectories lacked accuracy, which counteracted with the delay compensation effect.
Little jumps appeared in the DPSR and echo method predicted trajectories, which brought down the TR values.
Intuitively, TRs would be assumed hard to improve; the prediction ability became the key limit of the OCR elevation. But this was not true in reality. The trajectories’ smoothness had significant effect on the value of TRs. This was because the motor controller displayed much higher performance when the tracking trajectories were smoother. Therefore, the PRs and TRs were not independent and the TRs actually relied on the predicted trajectories. Also, smoothness was the inherent characteristic of human motion; if the predicted trajectories had little jumps over the current positions, the jumps should be corrected by the algorithm. The correction was an important part of the fused method.
The fused method with jump correction outperformed the other methods evidently. The TRs improvement with the PRs elevation in Table 1 provided strong support for the observation of the importance of smoothness, which could also be inferred by the local view of Figure 11 visually.
Besides, the performance during initiation, transition, and termination demonstrated the characteristics of different methods. The DPSR method was history dependent, which presented sharp oscillation locally at the beginning of the initiation process with no history data, the termination process with sudden ending, and the transition process, as shown in Figure 12(a). The echo method needed the joints’ data of the other side, which led to erroneous data with a length of around a half joint motion cycle during the initiation process, as shown in Figure 12(b). Figure 12(c) demonstrates that the fused method performed with excellence continuously across the whole time span.
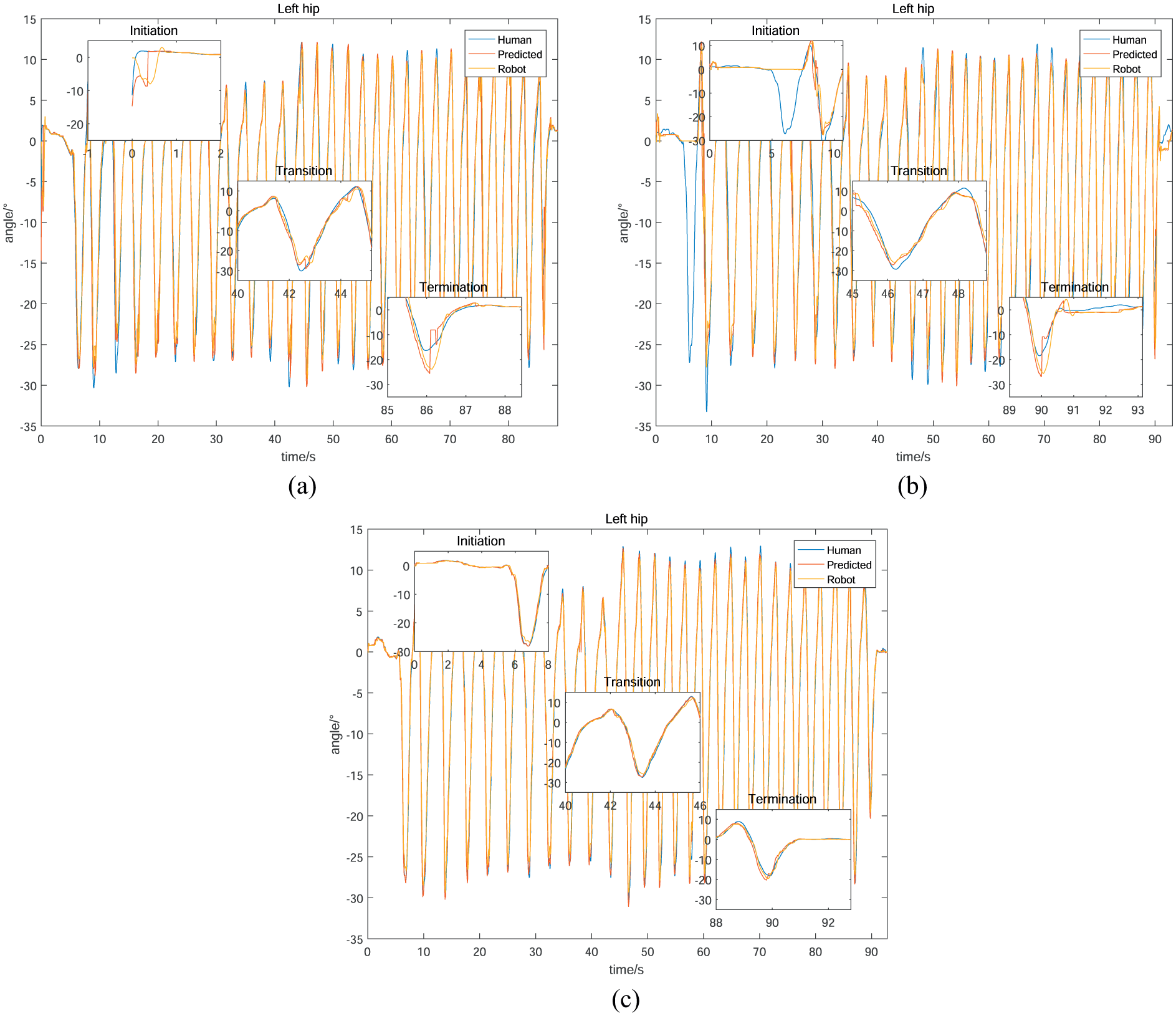
Typical errors predicted during initiation, transition, and termination by different methods: (a) DPSR prediction method, (b) echo prediction method, and (c) fused prediction method.
To unveil the tracking abilities during normal conditions, the initiation and termination stages were excluded from the original data and the metrics were calculated again. In Table 2, most PR, TR and OCR values of ‘Echo (ex. IT)’ exhibited visible raise when comparing with the corresponding values of ‘Echo’, while for the DPSR and fused methods such a phenomenon was not obvious. The DPSR method did not show any superior over the echo method when the initiation and termination conditions were excluded, while the fused method metrics hardly changed meaning higher robustness.
Performance of different methods including and excluding initialization and termination (ex.IT).

PR: prediction ratio; TR: tracking ratio; OCR: overall compensation ratio; DPSR: delay-coordinate phase space reconstruction.
If the proposed methods were applied to the exoskeletal robot wearing by its operator, it could be deduced that the echo and DPSR method would perform even worse, because the human–robot interaction would introduce more sudden change, irregular and non-periodic movement. The solution might be eliminating the prediction and compensation when such motion was detected; yet obviously the best choice from the current experiment should be exploiting the fuse method which is more accurate and robust.
It is the same for all prediction methods that deterioration happens in long-term prediction and the compensation would be ineffective. The acceptable prediction errors depend on specific applications. For the current compensation requirement of 20–60 ms of the robot system, the method works fine. We had tested the method on the same robot system with different motor controllers exhibiting a delay between 20 and 400 ms, when the delay was higher than 200 ms, the tracking results showed unacceptable local errors from time to time which meant 200ms was the limit for such a prediction method.
Conclusion
Based on analyzing the inherent features of human walking, we proposed and implemented three prediction method to compensate the delay of an exoskeletal robot system while tracking its operator’s walking, including the DPSR method, echo prediction method and fused prediction method. The conventional DPSR method and the proposed echo prediction method had difficulties in providing better performance over the uncompensated cases due to the short delay, insufficient prediction accuracy and trajectory smoothness. The proposed fused method exhibited significantly better performance with fewer prediction and execution errors even during the initiation, transition and termination phases. This validated the feasibility and efficacy of the fused method. Future work will be focused on the adaptation and implementation of the methods on patients with abnormal locomotion patterns.
Footnotes
Acknowledgements
The authors would like to thank Zhengya Zhang, Minzhi Li, Xiaokang Xin, and Changcheng Li from Xeno Dynamics Co., Ltd for the hardware design and fabrication, Yuanqing Wu from University of Bologna for instruction and assistance in the article writing.
Handling Editor: Fei Chen
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work is supported by the National Natural Science Foundation of China (U1630113) and the Fundamental Research Funds for the Central Universities.