
Abstract
In this study, a wrist human–machine interface with a single internal rotation center, which is efficient in terms of performance, size, and avoidance of kinematic interference, is proposed to realize the 3-degree-of-freedom rotational motion of the human wrist. For this purpose, an over-actuated coaxial spherical parallel mechanism is applied. The over-actuated mechanism is specially considered to improve the force feedback performance and to overcome the workspace limitations caused by the singularity. From a mechanical perspective, two links are coaxially connected to the base, and this rotation axis is designed to coincide with the wrist pronation–supination, which has the largest operating range in wrist motion. A prototype was fabricated and evaluated to validate the proposed mechanism. In addition, a usable design index was proposed for the design that prevents interference with the user in the workspace while minimizing the link inertia to optimize the device. This index is optimized with the general performance indices, that is, condition index and stiffness index. It was verified through simulation that the optimized wrist human–machine interface exhibited higher performance than other similar devices. In addition, range of motion is at least 104.3% than a daily living range of motion of the human wrist, guaranteeing all ranges of motion.
Introduction
Recently, human–machine interfaces (HMIs), which focus on physical force feedback, have been actively proposed in various fields. 1 To improve the performance of force feedback, it is necessary to achieve low inertia, back drivability, large workspace compared to device size, high stiffness, high accuracy, and wide bandwidth for the force response. 2 In particular, for an exoskeleton robot, which is one of the special-purpose HMI types, a match between the human joint rotation center and the device rotation center becomes an important element in design because it is related to safety and operation. 3
The wrist has the characteristics of a spherical joint that operates with 3 degrees of freedom (DOF)—pronation–supination (PS), flexion–extension (FE), and abduction–adduction (AA)—for a single rotation center in the body. In general, orthogonal serial structures have been applied to the wrist exoskeleton HMI. They have been mainly proposed because they are easy to design and analyze; moreover, the range of motion (ROM) can be easily considered, and the rotation center can be placed close to the human wrist center. 4 However, the small bandwidth for the force response and the machine impedance that is increased by the inertia of the actuator attached to the moving part have been identified as major drawbacks. 5 As an alternative, parallel wrist human–machine interface (WHMI) using a prismatic drive has been developed.6,7 In this instance, a parallel mechanism was applied to the FE and AA DOF. This reduced the inertia of the moving part by placing the actuator in the base of the parallel structure, and high stiffness and high force feedback performance were realized. The applied 2-DOF rotation and 1-DOF translation mechanism, however, can cause a mismatch problem between the human wrist center and the device rotation center. 8 In addition, a large inertia is applied because the actuator must be additionally mounted on the base of the parallel structure for the PS operation. The application of the parallel mechanism including the above-mentioned proposed device has a serious problem in that the workspace is limited by the singularity. Therefore, a serial-parallel mixed type or an over-actuated mechanism is typically used to address this problem.9–12
Gosselin and Hamel 13 proposed a 3-RRR type spherical parallel mechanism with the advantage of a parallel structure for 3-DOF operation of a single rotation center. Due to the above-mentioned advantages of the mechanism, it was mainly developed as a non-exoskeleton-type desktop HMI.14,15 In particular, SHaDe, 15 a haptic device with 3-DOF, showed that the wrist-oriented design is more appropriate for joint movement with the human body than the palm-oriented design.
Despite its various advantages, the spherical parallel structure was difficult to apply to the wrist HMI in the previous studies for two major reasons. The first reason is that the human wrist joint ROM is very large. In the parallel structure, there is a limitation in the ROM that can perform the combined operation due to the influence of the singularity. The second reason is that the large ROM leads to the complex movements of the links in the spherical parallel structure. This can cause safety problems due to the collision between the user and the links. It is possible to increase the size of the links to avoid interference with the user, but this increases the link inertia, diluting the advantages of the spherical parallel structure mechanism.
To overcome such problems and develop an efficient exoskeleton-type WHMI, an over-actuated coaxial spherical parallel structure with a 2-RRR structure was proposed in this study. The over-actuated structure was proposed to extend ROM by overcoming the singularity and to improve the feedback performance. In addition, one joint of each link chain was coaxially connected to the base to fully guarantee 1-DOF. 16 This allowed the proposed WHMI to independently and completely cover the PS axis with the widest DOF in the wrist. This design approach had the advantage that only 2-DOF movements had to be reflected in ROM selection or optimization considerations. Furthermore, the spherical mechanism with a single internal rotation center made it easy to locate the rotation center of the device close to the center of the human wrist. In the design optimization process, we proposed a usable design index for the design that can reduce the link inertia while preventing the collision between the moving links and the user. In the development of the proposed device, this index was considered together with the condition and stiffness indices, which are general performance indices, and applied to the WHMI optimization.
The kinematics of the proposed device are analyzed and reported in section “Mechanical analysis,” and its performance is verified through simulation in section “Prototype validation.” A simple prototype is fabricated to verify the validity of the exoskeleton-type HMI device. In section “Optimization,” the optimal design results are shown with optimization indices. In section “Discussion,” the derived optimal design verifies the excellence of the proposed mechanism through the simulation verification. Finally, the conclusions are provided in section “Conclusion.”
Mechanical analysis
Kinematics analysis
The proposed mechanism has a parallel structure in which the first joint rotation axis of the 2-RRR structure is coaxially connected, and its kinematic analysis is based on the spherical law of cosines
17
like the general spherical parallel structures. Figure 1 shows the prototype of the proposed mechanism and Figure 2 shows the joint angles and design parameters. Subscripts


Prototypes of the over-actuated spherical parallel mechanism. (a) and (b) indicate the pre-optimized design and the optimized design, respectively.
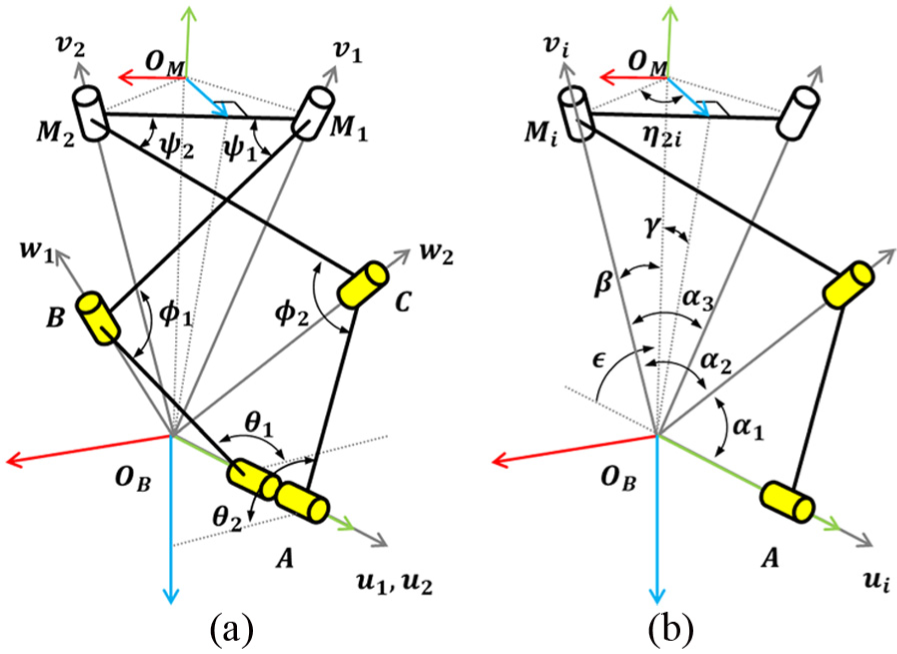
Denotation of the over-actuated mechanism: (a) the angles of the joints and (b) the design parameters. The active joints are shown in yellow, and the passive ones are in white.
Assuming the angle between the plane

Assuming the angle between the plane


In the same manner,

Assuming the angle between the plane

The sign of


The wrist rotation DOFs are represented in the PS-FE-AA order. PS corresponds to the Z-axis rotation, FE to the Y-axis rotation, and AA to the X-axis rotation. The final rotation angles will be represented by the Z-Y-X Euler angle denotation and denoted by
Inverse kinematics analysis
Assuming the rotation matrix of the mobile platform for the base platform is

In this instance, as
Jacobian analysis
As only rotation movements are generated in the spherical parallel structure, the Jacobian of the device is defined as a rotation Jacobian. The rotation angular velocity

When the velocity vector of the active joint is defined as


where
Prototype validation
To validate the kinematics of the proposed device, simple parameters were applied and numerical inverse Jacobian position control simulation was performed. Table 1 lists the parameters applied to the simulation. The position control equation that used inverse Jacobian was
Parameters of the prototype.

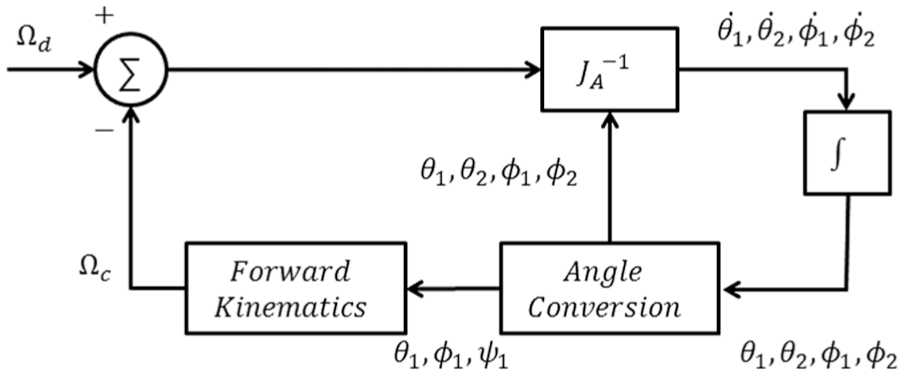
Simple block diagram of the inverse Jacobian position control.
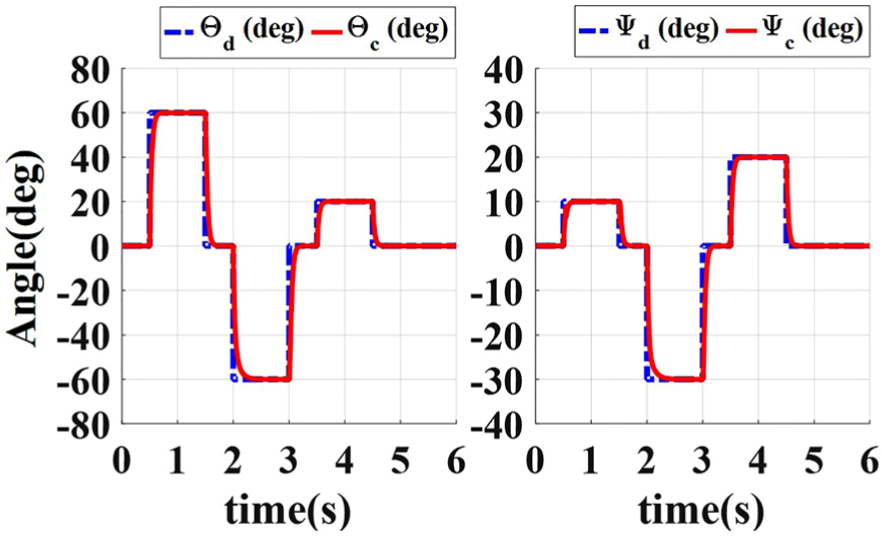
Results of the inverse Jacobian position control simulation. Subscripts “d” and “c” represent the desired and current values, respectively. The blue lines represent the input angles and the red lines the output angles through the control results. Θ denotes the angle corresponding to FE and Ψ denotes the angle corresponding to AA.

A subject with the pre-optimized prototype.
Optimization
In this section, the wrist device ROM is selected and optimized to ensure the activities of daily living (ADL) ROM.18,19 Condition, stiffness, and usable design indices are introduced as optimization indices, and the validity of the results is shown. As the ROM of PS is guaranteed independently, optimization is performed only for FE and AA. Therefore, only 2-DOF is considered for optimization, making it possible to lower the complexity of the optimization process. The ROMs of FE and AA were set as 120° and 60°, respectively, to guarantee higher values than the ADL ROM (Table 2).
ADL properties and joint limit of the wrist.

Global condition index
The global condition index (GCI) is generally used as an index for representing force isotropy or dexterity performance. GCI is the total workspace average of the local condition index (LCI) that represents the condition under a certain state.
20
LCI ranges from 0 to 1, and the value closer to 1 means better force isotropy. Equation (13) represents the LCI derived from the nth posture and


Global stiffness index
Stiffness means displacement compared to the force applied to the end in a certain posture, and a higher stiffness can express a virtual hard wall.
21
The stiffness index can be expressed using the local stiffness index (LSI) and global stiffness index (GSI), like the condition index. The stiffness index is derived through the relationship


Usable design index
Kinematic interference between the user and the moving links in the exoskeleton-type device can affect safety and operation. In general, it is possible to increase the size of the links to avoid interference with the user, but this causes a problem of increasing the inertia of the moving parts. Therefore, the design that reduces the inertia of the links while preventing interference is an important design consideration in HMI. In this study, the distance between the Z-axis which is the wrist–forearm-direction axis and the simplified links moving along the spherical surface centered at the wrist rotation point, is proposed as the usable design index. Let the distance between the Z-axis and the simplified moving links on the ROM be denoted by

where
Optimization result
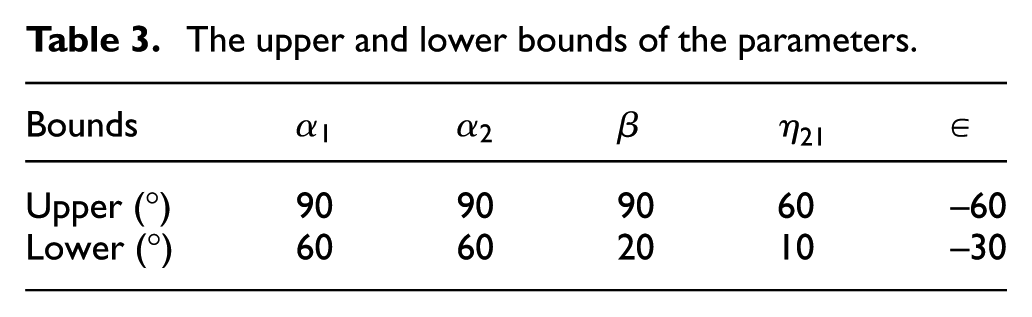
To optimize the three indices—GCI, GSI, and usable design index—proposed in this study, the non-dominated sorting genetic algorithm II (NSGA-II), a multi-purpose function optimization algorithm, was used. 22 The initial settings were crossover probability 0.9, mutation probability 0.2, and distribution index 20. The optimization of population 50 and generation 100 was performed 10 times. Equation (18) represents the objective function of the optimization, and Table 3 represents the upper and lower bounds of the parameters. The red dots in Figure 6 represent the final optimized results

The upper and lower bounds of the parameters.

A NSGA-II genetic algorithm results. The red dots represent the parameters derived from the final evolution in each generation. The distance (D) in the graphs represents
The optimization results showed that GCI and GSI are proportional and D is inversely proportional. In other words, there is a trade-off relation between the performance and interference avoidance of the device, and appropriate parameter selection is required accordingly. Three types of IDs were derived as examples of the optimization results. ID1 has sufficient GCI and GSI performances and a large
The upper and lower bounds of the parameters.


Graph of the local condition index map.

Graph of the local stiffness index map.
Discussion
Table 5 compares the finally derived performance indices with those of the existing similar exoskeleton-type wrist HMI mechanisms. The performance comparison was conducted based on the GCIs, LCIs, and ROMs with similar studies. The parallel type was compared with SHaDe, which used a spherical parallel structure, and Rice wrist-A, which had a 3-RRR structure. In the case of Rice wrist-A, the GCI was not mentioned, but the maximum LCI was 0.22 and the minimum LCI was 0.08, and thus, the GCI, meaning the overall average LCI, could be predicted as being between 0.08 and 0.22. In the case of Gimbal, the mechanism was an orthogonal series type, and the kinematics was analyzed in the same PS-FE-AA order as the analysis of the proposed structure. In this case, for the series structure, the performance indices were analyzed for FE 120° and AA 60° in the same manner as the ROM of the proposed device.
Performance comparison with similar devices.

Min(LCI) means the minimum LCI in the entire ROM. The proposed mechanism exhibited very high force isotropy and dexterity performance on average in the workspace with the GCI of 0.9092. The minimum LCI was 0.7830, which was higher than that of all other mechanisms in the ROMs. This means that WHMI is capable of showing a high performance in the ROM regardless of the posture. For GCI, the performance was 14.3% and 8% higher than those of SHaDe and the serial type. For the minimum LCI, the performance was 675.2% and 35.6% higher than those of SHaDe and the serial type. The ROM of the device was 56.5% wider for the PS axis, 4.3% for the FE axis, and 5.2% for the AA axis compared to the ADL ROM. As the finally derived parameters were optimized with the usable design index, they had the minimum link radius without interference, that is, the minimum link inertia, even with the same performance. The usable design index was 0.5029, which corresponded to

Snapshots of the optimized WHMI.
Figure 10 shows the kinematic analysis results of the final proposed model. It shows the

Angles of the active joints according to the motion of the end. (a), (b), and (c) show the results of the PS, AA, and FE motion, respectively, when the end is moved with the sin waveform having the maximum ROM magnitude
Figure 11 shows the torque of the actuator with the largest load when 1 N m torque was applied axially to the wrist center for all the postures in the ROM. This can be confirmed by the relation
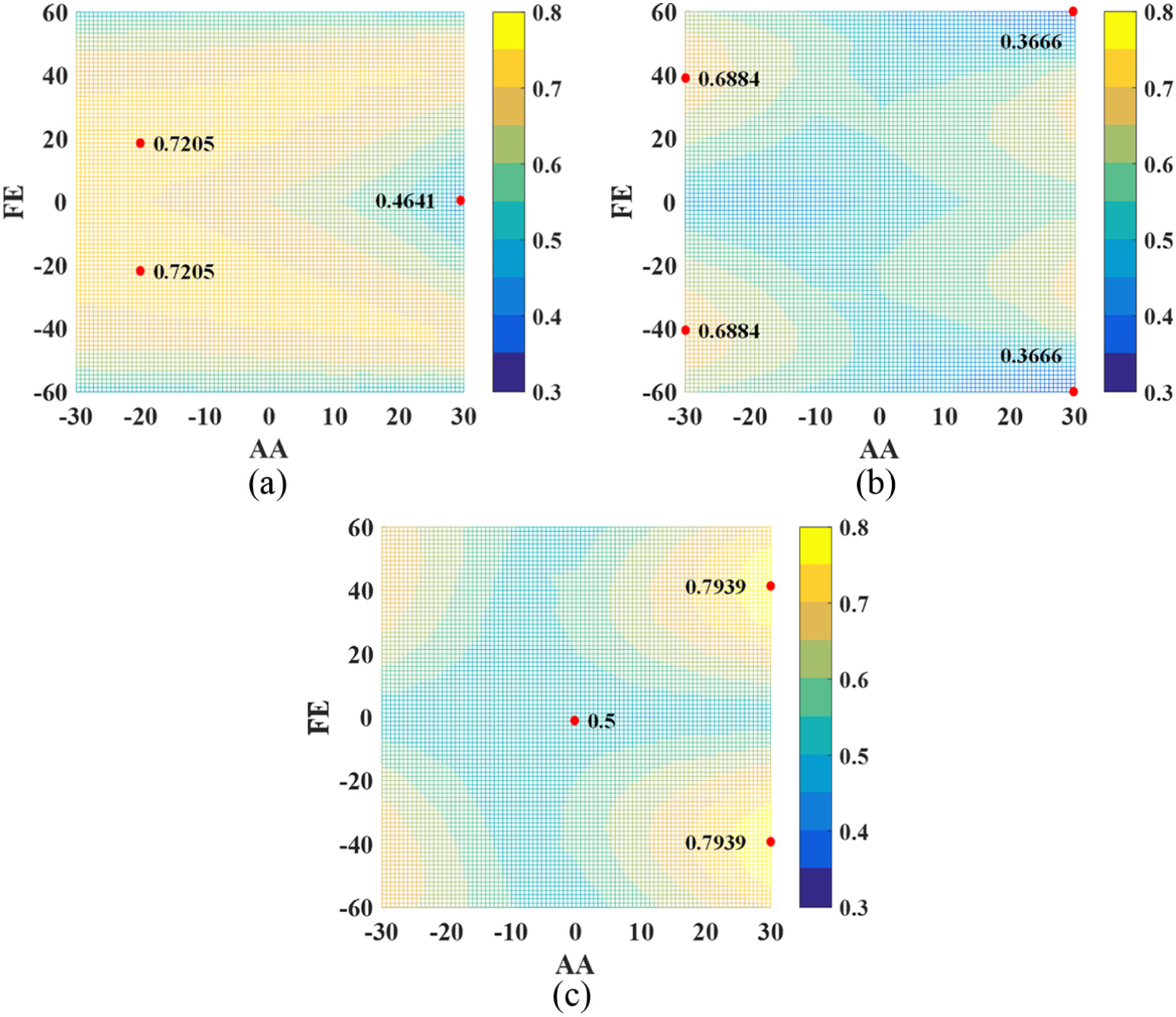
Torque of the actuator with the largest load when 1 N m torque is applied axially to the end for all the postures in the ROM. (a), (b), and (c) show the results when the torque was applied in the AA, FE, and PS direction, respectively. The numbers on each graph represent the maximum and minimum values.
Conclusion
In this study, a new 3-DOF exoskeleton-type WHMI mechanism based on the over-actuated coaxial spherical parallel mechanism was proposed. Due to the characteristics of the proposed wrist HMI mechanism, it is easy to closely place the rotation centers of the human wrist and the device, and the same DOFs are guaranteed. To achieve this, a coaxial structure was applied to guarantee the independent operation in the PS axis, which has the widest ROM, and the over-actuated structure was considered to overcome the ROM limit of the parallel structure and improve performance. First, the proposed mechanism was validated by kinematic analysis and simulation. A prototype was fabricated for experimental verification, and the applicability of the exoskeleton-type WHMI was confirmed. The usable design index that estimates the minimum link size to avoid interference with the user was additionally proposed for the extended research. This index was applied together with GCI and GSI to optimize the proposed mechanism. The excellence of the optimized mechanism as a HMI was confirmed through performance index comparisons with existing similar devices. The proposed mechanism will be experimentally verified in a follow-up study and will be completed after user evaluation in application areas, including rehabilitation.
Footnotes
Handling Editor: Yong Chen
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This research was supported by the Basic Science Research Program through the National Research 1 0 of Korea (NRF) funded by the Ministry of Education (2017R1A2B3010336) and by the Research Grant of Kwangwoon University in 2017.