
Abstract
In this article, the most contribution is to propose a novel general stiffness model to analyze the stiffness of a wall-climbing hexapod robot. First, we propose a new general stiffness model of serial mechanism, which includes the linear and nonlinear stiffness models. By comparison, the nonlinear stiffness model is a variable stiffness model which introduces the external load force as a variable, obtaining that the nonlinear stiffness model can greatly improve the accuracy of stiffness model than linear stiffness model. Then, the stiffness model of one leg of the robot and the overall stiffness model of the robot are derived based on the general stiffness model. Next, to improve the stiffness of the robot, a new minimum and maximum stiffness are introduced, which provide with effective reference for the selection and optimization of the structural parameters of the robot. Finally, we develop a new wall-climbing hexapod robot based on selection and optimization of the structural parameters, then the experiments are used to show that the selection of structure parameters of the robot effectively improve the stiffness of the robot.
Keywords
Introduction
Modern city skyscrapers, for good glass lighting performance and good esthetic considerations purposes, glass curtain walls have been widely used in the high buildings. Due to the perennial exposure in the air, contaminations accumulate on the glass curtain wall surface, which need to be removed regularly. There have been two kinds of wall-cleaning methods so far. The first one mainly depends on cradle-carried window cleaners. The second method is to install a track on the roof, and the glass wall is then washed by the window-cleaning machine. The former method has low efficiency and high risk. The latter method has limited the field of application; hence, there is a large demand for high-altitude glass-wall cleaning robots.
Wall-cleaning robot can move on glass curtain walls flexibly, which consists of three major parts including the cleaning device, the adhesive mechanism, and the motion mechanism, of which the adhesive mechanism and the motion mechanism are the important contents. The adhesive mechanism mainly includes the following: adhesion of adhesive materials, 1 magnetic adhesion, 2 and vacuum adhesion.3,4 Adhesion of adhesive materials can be applied to wall surfaces with various shapes, but it is difficult to be applied to large-size robots. The magnetic adhesion is more flexible, but its application is limited to surfaces of magnetic material with permeability. The vacuum adhesion on glass curtain wall is strong, and its application is wide. The motion mechanism of robot mainly includes frame type, 5 crawler type, 6 and legged type. 7 Frame structure is simple, but the motion is not continuous. The bearing capacity of crawler-type is strong, but the turning is difficult. Legged-type robots offer strong obstacle crossing abilities and wall adaptability. In legged robots, Zhang et al. 8 analyzed a hexapod robot walking on unstructured terrain. Wang et al. 9 investigated motion performance of a radial symmetrical six-legged robot.
Mechanism stiffness is a very important evaluation index for the performance evaluation of mechanism. 10 The research of stiffness is therefore very necessary in the mechanism design or precise control of mechanism. For a linear deformation, the relationship between force and deformation is described by a stiffness matrix.11–13 In general, considering the flexibilities of each compliant element, the stiffness model of robot which has six legs can be established directly. 14 Some works contain the results of the manipulator under external loading, the influence of the passive joint, 15 and internal constraints. 16 Other works analyzed the problem with antagonistic actuating or internal preloading of the robot. 17 The existing methods of the stiffness modeling can be divided into three categories: (1) the finite element analysis (FEA), (2) the matrix structural analysis (SMA), and (3) the virtual joint method (VJM). The FEA is the most accurate one, 18 which allows for modeling joints and links with their true shape. 19 SMA also uses the main ideas of the FEA and works with 3D flexible beams which are presented in the manipulator structure. 20 Finally, the VJM method describes the elastic deformations of the actuators, links, and joints. 21
Several different performance indices have been proposed of stiffness evaluation, including minimum stiffness, maximum stiffness, and determinant of stiffness matrix.22–24 The determinant of stiffness matrix cannot distinguish specific stiffness values in a certain direction.25,26 The minimum and maximum stiffness27–29 can reflect variation range of the stiffness value of the mechanism, and the corresponding eigenvector directions of the minimum and maximum stiffness of mechanism represent the minimum and maximum stiffness direction, respectively.
In this article, the support legs which are deformed are influenced by the gravity of the robot body and cleaning mechanism. The position control and precision control of the robot body are thus affected, and the walking trajectory deviation occurs in the process. Thus, the stiffness of the wall-climbing hexapod robot is investigated. Previous studies have mainly focused on the deformation of the joint as a linear deformation. However, there is a considerable part of the mechanical joint deformation that does not meet the linear deformation. In this case, the error between the stiffness matrix which is obtained using the linear instead of the nonlinear and the real stiffness matrix can be very large, and the stiffness matrix cannot reflect the effect of the external load force on the stiffness of the mechanism. The most contribution of this article is to propose a new general stiffness model of serial mechanism, which includes linear and nonlinear stiffness models. Next, by comparing the linear and nonlinear stiffness models, obtaining the nonlinear stiffness model introduces the external load force as a variable, which can greatly improve the accuracy of stiffness model. However, linear stiffness model is a constant. Furthermore, to improve the stiffness of the robot, a new minimum and maximum stiffness are introduced, obtaining a reasonable range of structure parameters and providing effective reference for the selection and optimization of the structure of the robot. According to the investigations of this work, it provides a scientific basis for the position and precision control of wall-climbing hexapod robot.
Structural design of wall-climbing hexapod robot
We first design a wall-climbing hexapod robot; the computer-aided design (CAD) model is illustrated in Figure 1. The body frame of robot is a shape of regular octagon. The robot is designed with six legs and each of which consists of four components, including the suction cup, calf, thigh, and hip. The suction cup generates the adhesive force that ensures the robot can adhere on the glass curtain wall. The suction cup and calf are connected by a spherical joint, and the calf and the thigh, and the thigh and the hip are connected by revolute joints, which are parallel to the body. The hip and the body are also connected via a revolute joint perpendicular to the body. The connection between calf and thigh is defined as joint 3, the connection between thigh and hip is defined as joint 2, and the connection between hip and body is defined as joint 1.

CAD model of wall-climbing hexapod robot.
The three-dimensional mathematical model of the robot is shown in Figure 2(a), and the top view of the mathematical model is shown in Figure 2(b). Points

(a) Mathematical model of the wall-climbing hexapod robot and (b) top view of the mathematical model of the wall-climbing hexapod robot.
Stiffness model of wall-climbing hexapod robot
In order to improve the accuracy for the stiffness model of the robot, we first propose a new general stiffness model of serial mechanism, which includes the linear and nonlinear stiffness models. The linear stiffness model is a constant stiffness model. However, the nonlinear stiffness model is a variable stiffness model which is more comprehensive to indicate the relation between force and deformation at the end of serial mechanism. Next, based on general stiffness model of serial mechanism, we establish the stiffness model of one leg of robot, and then derive the overall stiffness model of the wall-climbing hexapod robot.
General stiffness model of serial mechanism
For the serial mechanism, it is supposed that the individual bars of the mechanism are not flexible, and the actuating and transmission agents are the only flexible source in the mechanism. Supposing that there are

where
It is supposed that

where
Then, the torque/force and deformation of all joints can be expressed in matrix form as follows

where
Derived from the definition of velocity Jacobi matrix


where
According to equations (3)–(5), obtaining

Supposing that C is a compliance matrix of serial mechanism, by equation (6), yielding

where C is
The stiffness matrix and compliance matrix are mutually inverse matrix, thus, the stiffness matrix of serial mechanism can be given by

where

It can be seen that
Thus, for all joints, if
If there are several joints, and the relation between the moment or force and deformation of these joints satisfies
If Jacobi matrix J is

General stiffness model of one leg of wall-climbing hexapod robot
On the basis of the general stiffness model of serial mechanism explained in section “General stiffness model of serial mechanism,” next we establish the general stiffness model of one leg of the wall-climbing hexapod robot.
The mathematical model of one leg of the wall-climbing hexapod robot is shown in Figure 3. The global coordinate system

where



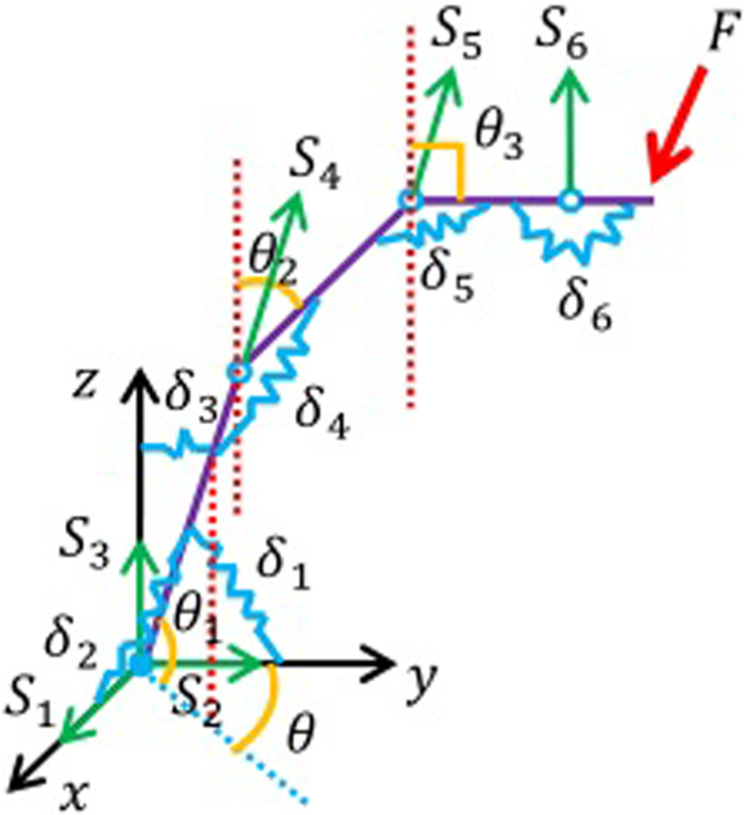
Mathematical model of one leg of the wall-climbing hexapod robot.
It is assumed that

where
Then, yielding

where the unit of
The general stiffness matrix
Overall stiffness model of wall-climbing hexapod robot
Based on the general stiffness model of one leg of the robot explained in section “General stiffness model of one leg of wall-climbing hexapod robot,” next we establish the overall stiffness model of the wall-climbing hexapod robot.
It is supposed that the robot has

Supposing matrix

By equation (17), it is obtained that the overall stiffness matrix of the robot is the sum of the stiffness matrix of each support leg. Therefore, the analysis of overall stiffness model of the robot can be simplified as the stiffness analysis of all supporting legs, which greatly facilitates the calculation of the overall stiffness model of the robot.
Stiffness analysis of wall-climbing hexapod robot
Analysis of general stiffness model
We have already proposed a new general stiffness model of serial mechanism in section “General stiffness model of serial mechanism,” next, by comparing the linear and nonlinear stiffness models, indicating that the nonlinear stiffness model can effectively improve the accuracy of the stiffness model than linear stiffness model. In the following, we use one leg of the robot as the research object, indicating that the nonlinear stiffness model can show the effect of the external load on the stiffness model but the linear stiffness model cannot show the effect of the external load on the stiffness model. First, the estimated structural parameters of the robot in Figure 3 are summarized in Table 1.
Estimated structural parameters of the wall-climbing hexapod robot.
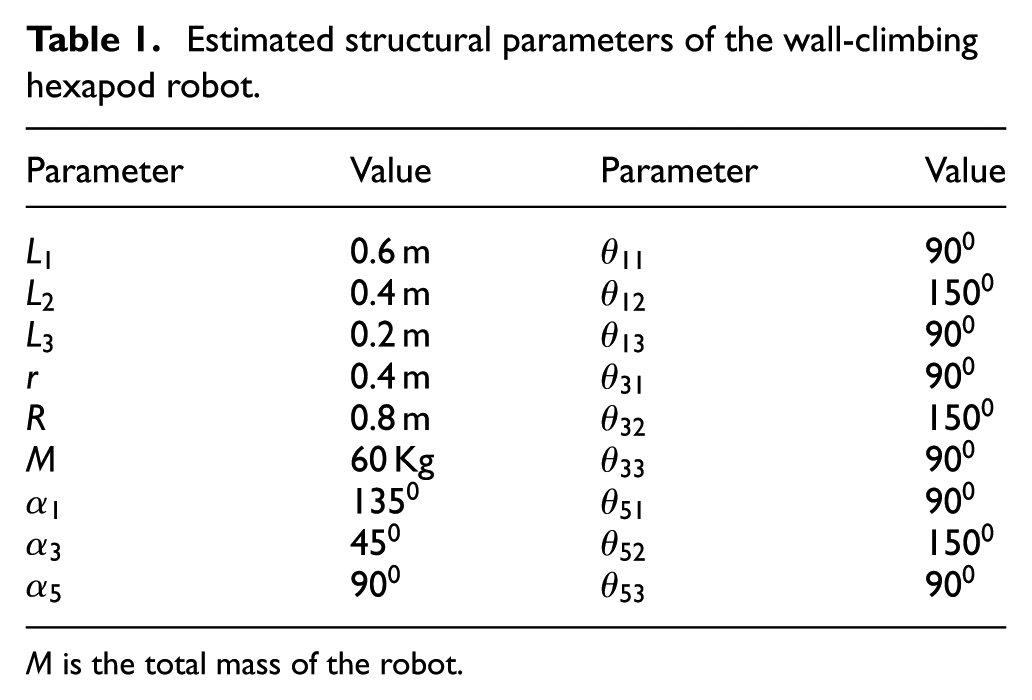
M is the total mass of the robot.
According to the estimated structural parameters of the robot, in this article, the suction cup which is produced by a Japanese SMC company is selected, of which the model is ZP2-250HTN, as shown in Figure 4. According to torque requirements of each joint of the robot, the motors and the retarders produced by Shenzhen Techservo Co. Ltd in China are selected. The models of the motors and the retarders are shown in Table 2, and the structure is shown in Figure 5.

Suction cup of the wall-climbing hexapod robot.
Models of the motors and retarders of the wall-climbing hexapod robot.


Motor and retarders of the wall-climbing hexapod robot.
The experiment data of the relation between torque
Data relation between torque
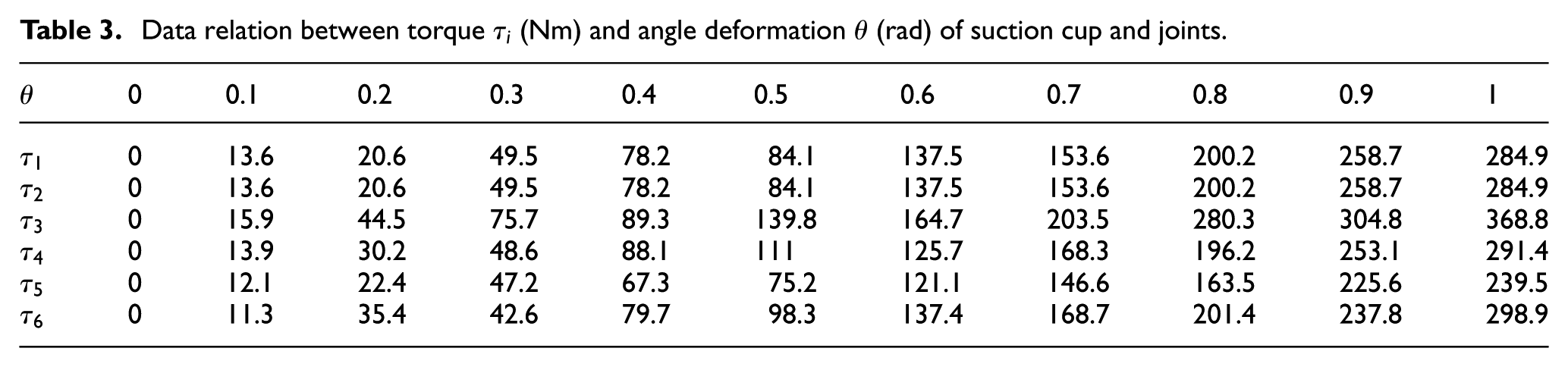
We select polynomial function to fit the experimental data; here, in order to simplify the calculation, the quadratic function is selected to fit the data, as shown in Figure 6, and the deformation coefficients of the quadratic function are summarized in Table 4.

Experimental data are fitted with the quadratic function. (a) Relation between
Deformation coefficients of the quadratic function.
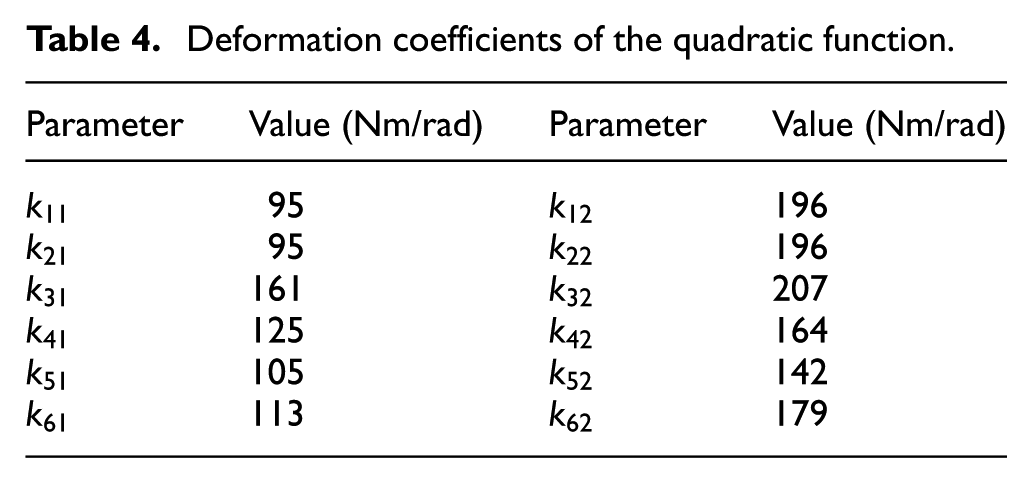
It is obtained that the maximum absolute errors between the experimental values and the fitted values of torques
Next, the external force

Derived from equations (3), (5), (9), and (18), the nonlinear deformation coefficient can be obtained as follows
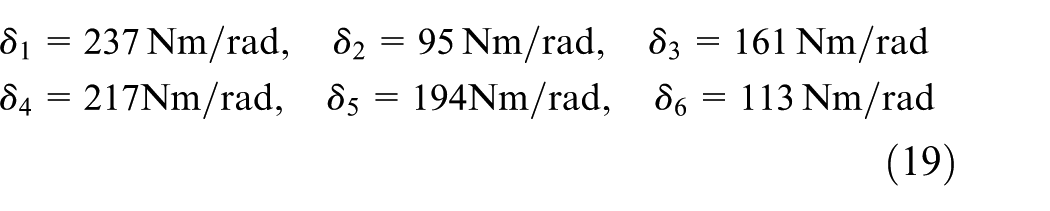
Equation (19) gives the nonlinear stiffness coefficient when the force

(a) Relation between
From Figure 7(a), (d), and (e), it can be seen that when the external force
The nonlinear stiffness model of one leg has been analyzed, and the nonlinear deformation coefficients of each joint have been obtained above. Next, we select the linear stiffness model to analyze the stiffness model of one leg, and the deformation of each joint is assumed to be a linear deformation. Here, in order to simplify the analysis of the linear stiffness model, the suction cup is selected to rotate around x axis as an example to analyze the linear stiffness model. The linear stiffness model of the suction cup around the y and z axes and the linear stiffness model of the joints 1, 2, and 3 can be analyzed by the same method. According to the data summarized in Table 2, we select linear function to fit the experimental data, as shown in Figure 8. It is obtained that the linear deformation coefficient

Relation between
Based on the above analysis, the nonlinear stiffness model can effectively improve the accuracy of the stiffness model than the linear stiffness model, reducing the error between the joint deformation coefficient and the real joint deformation coefficient of the robot.
Stiffness evaluation of one leg of wall-climbing hexapod robot
Since the structural parameters of the robot directly affect the stiffness of the robot, in order to improve the stiffness of the robot, next, we investigate the influence of structural parameter on the stiffness of the robot. By equation (17), it is obtained that the research of the overall stiffness model of the robot can be converted to the research of the stiffness model of supporting legs. Thus, we investigate the influence of structural parameter on the stiffness of one leg. However, the units of elements in equation (14) are not consistent, then there is no way to compare the size of eigenvalues. Thus, the conventional minimum and maximum stiffness cannot be applied to a 6 × 6 symmetric stiffness matrix. Here, we define a new minimum and maximum stiffness to evaluate the stiffness performance of one leg. In order to facilitate the presentation of this definition, we first block the stiffness matrix

where the symmetric 3 × 3 block matrices A and C denote the pure rotation and translation matrices, B is the coupling one, and
Then, by equation (15), yielding

The unit of each element in matrix A, B, and C is Nm/rad, Nm/m, and N/m, respectively. That is, the unit of each element in matrix A, B, and C is respectively consistent, Thus, we define the minimum and maximum eigenvalues of the matrix A, B, and C as the minimum and maximum stiffness, respectively. Here, we are primarily concerned with the forces and deformations of the robot along the axes x, y, and z. Thus, we investigate the minimum and maximum stiffness of matrix C to evaluate the stiffness performance of one leg, which provide with effective basis for the selection and optimization of the structural parameters of one leg. Next, in order to facilitate research, we take the value of

(a) Influence of structural parameter
In Figure 9(a), it can be seen that when
(a) Influence of structural parameter
In Figure 10(a), when the length
Experiments
We have analyzed the effect of the structural parameters

(a) Prototype of the wall-climbing hexapod robot and (b) structure of one leg of wall-climbing hexapod robot.
In order to show that the prototype of the robot has good stiffness performance, simulations are operated. Here, it is assumed that the structural parameters of the robot
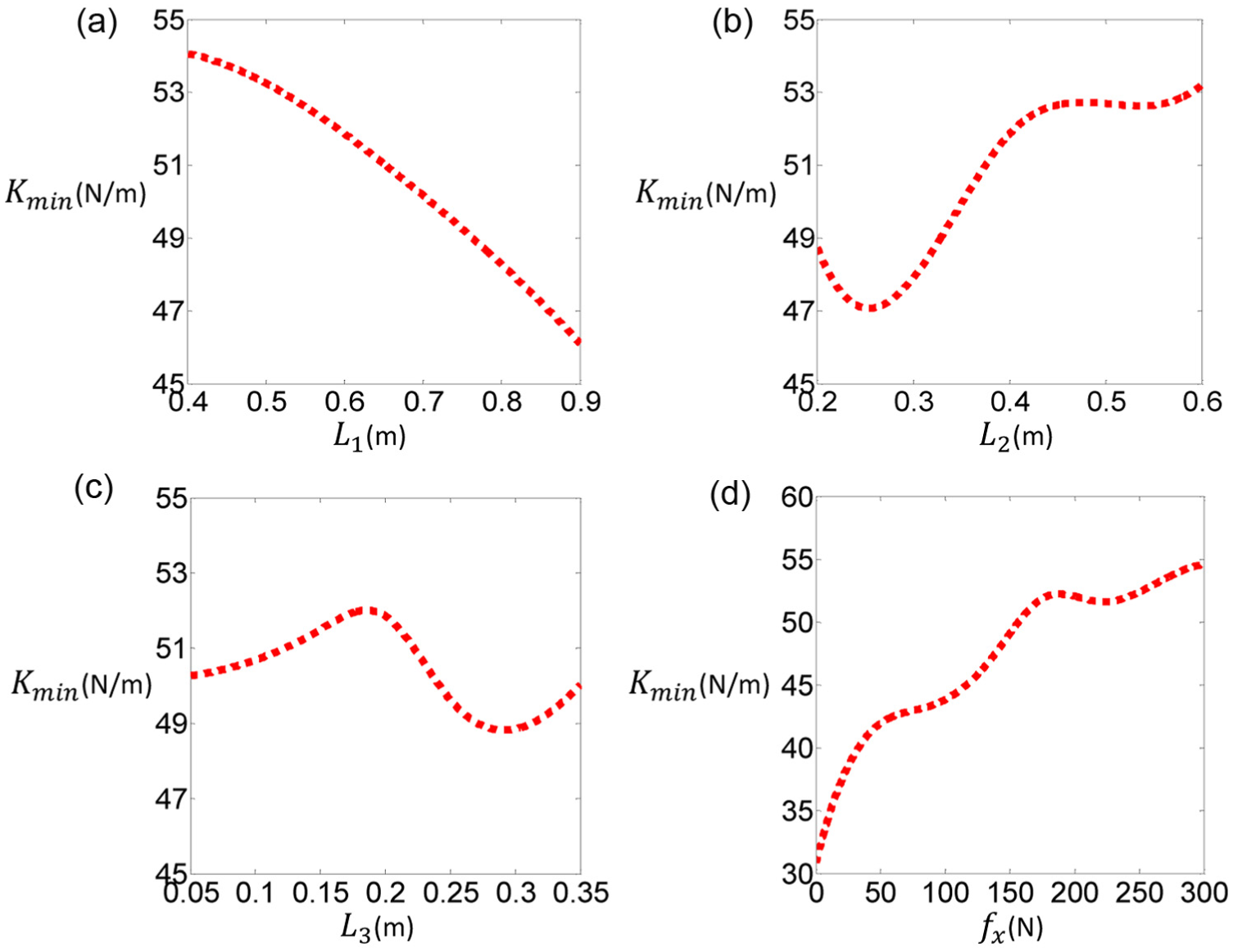
Wall-climbing hexapod robot walks on vertical wall in horizontal direction using the triangle gait.
The results of simulations and experiments are given in Figure 13. The x axis is the horizontal direction, and the y axis is the vertical downward direction.

Results of simulations and experiments of the wall-climbing hexapod robot.
Through Figure 12, it is obtained that the deformation of each leg of robot is very small, and the robot can walk very well in the vertical wall. From Figure 13, we can see that the simulation results show that parameter A of the robot effectively improves the stiffness of the robot than parameter B. Furthermore, when
Discussions
When the wall-climbing hexapod robot adhere on the glass wall, the impact of the weight of the robot body will generate deformation of support leg and also affect the position precision and the track of the robot. In previous researches, the deformations of joints of the robot are mainly defined as linear deformation and obtain the stiffness matrix of the robot. But in practice, some deformations of joints of the robot are not satisfied with the linear deformation, but satisfied with the nonlinear deformation. In this case, if the linear deformation of joint is used to replace the nonlinear deformation of joint to study the stiffness of the robot, this will make the stiffness model of the robot have a large error with the real stiffness model, hence influencing the control accuracy and trajectory of the robot.
The quadratic function has been selected to fit the experimental data in this article. However, the polynomial function of three or higher order can also be used to fit the experimental data, making the relation between the torque and the deformation of joints more accurate, so as to effectively improve the stiffness analysis of the robot. In this article, the stiffness analysis of wall-climbing hexapod robot using the triangle gait on the wall is analyzed. Simultaneously, the quadrupedal gait and five foot gait of robot can be analyzed with same methodology of the triangle gait.
Conclusion and future work
In this article, we first propose a new general stiffness model of serial mechanism, which includes linear and nonlinear stiffness models. Different from the stiffness model of linear deformation, nonlinear stiffness model is a dynamic stiffness model, which can directly reflect the influence of the external load force as a variable on the stiffness model of the robot, and it can express the external load force and the deformation of the robot leg joints more accurately. Next, based on general stiffness model of serial mechanism, we establish the stiffness model of one leg of robot, and then derive the overall stiffness model of the robot. Meanwhile, the overall stiffness model of the robot can be decomposed into the stiffness model of the supporting legs; thus, the investigation on the stiffness performance of robot has been simplified as the research of stiffness of each leg. In addition, in order to improve the stiffness of the robot, a new minimum and maximum stiffness is introduced, obtaining effective reference for the selection and the optimization of the structure of robot. Next, experiments illustrate that the selection of structure parameters of the robot effectively improve the stiffness of the robot. The conclusions achieved in this work have improved the analysis of the stiffness performance of the robot greatly, and the accuracy of position control and walking trajectory effectively.
This article investigates the nonlinear stiffness model of the wall-climbing hexapod robot under circumstances of static and slow-uniform speed, and if the robot acts under circumstance of high-speed motion or variable-speed motion, the stiffness performance of the robot is also worth further researches in the future work. Simultaneously, the kinematic control of this wall-climbing hexapod robot will be investigated based on the kinematic model and stiffness model in the future.
Footnotes
Acknowledgements
The authors would like to express their thanks to Jiangsu Greenhub Technology Co. Ltd, China, for its technical support.
Handling Editor: Hiroshi Noguchi
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: The work was supported by the National Natural Science Foundation of China (grant nos 51275360, 51538009, and 51605334) and Excellent Technology Leadership Program of Shanghai (grant no. 15XD1525000).