
Abstract
For the controller structure design problem, a controller design method based on the integration of structure search and parameter optimization is proposed with the idea of ENAS, which automates the controller structure design work, and searches for the most suitable controller structure and completes the parameter optimization in a relatively short time. The simulation study with the galvano scanner as the controlled plant shows that the number of iterations and the consumption time of the method are only 15% of the traditional method in achieving the same performance compared with the traditional design method.
Introduction
After years of theoretical research and engineering practice, a variety of structures and forms of control theory and its controller design methods have been created and developed. The construction of a new control system structure has been an important direction in the development of control theory and control engineering.
In actual engineering, the structure of the constructed control system will be more complex, as shown in Figure 1, which is the composition and principle diagram of a single-channel longitudinal electrotransmission manipulation system. The electrotransmission steering system is actually composed on the basis of control stabilization, eliminating the irreversible power-assisted mechanical steering channel and retaining only the channel of electrical command signal output from the driving rod via the rod force sensor. The function and control principle of the system is the same whether analog or digital. For each given aircraft there may be different system structure and functional requirements, that is, there are different control laws, but in the basic structure of the controller will be more or less the same.

Composition and principle of single-channel longitudinal telegraphic manipulation system. 1
Therefore, for a control system used in engineering, its topology has a meaning and there exists a clear physical meaning and logical relationship. The development of traditional control system topology is also based on the continuous deepening of the mechanism of the controlled plant and control theory.
Most of the current control system optimization algorithms are for the optimization of control system parameters, control system structure optimization, or mainly rely on human intelligence and judgment.
Zoph and Le proposed a Neural Architecture Search (NAS) method to find a suitable neural network structure in 2017. 2 They used an RNN generator sampling to obtain a new neural network structure. The data is trained under this neural network structure and the accuracy on the corresponding validation set is obtained. This accuracy is used to characterize the performance of the neural network obtained from this search, which is then used as a reward function to train the RNN generator. The conceptual structure is shown in Figure 2.

NAS basic framework. 2
Since NAS methods consume a lot of computational resources, Pham et al. proposed an Efficient Neural Architecture Search (ENAS) method to quickly design the structure and weights of neural networks based on NAS. 3 It uses an LSTM (Long Short-Term Memory) as a generator to express the network structure as a directed acyclic graph. The directed acyclic graph has edges and nodes, where each node represents an operation and the edges represent the information flow. ENAS trains a generator to select an optimal subgraph from the directed acyclic graph (which determines which edges are activated in the directed graph), while the selected subgraph is trained using the classical Cross Entropy Loss.
Some specific applications of structure search have already emerged. Luo used NAS to compress large scale pre-trained language model and text-to-speech model by proposing or utilizing block-wise training, progressive pruning and performance approximation. 4 Zhou combined Huffman coding with NAS algorithm and applied it to image segmentation task. 5 Luo proposed an efficient NAS algorithm by combining Dynamical Isometry and achieve an high accuracy rate on the ImageNet classification task. 6 To overcome the ENAS model generalization error problem, Ahmed et al. examined the effectiveness of a range of techniques including reducing model complexity, use of data augmentation, and use of unbalanced training sets, and achieved remarkable results on the ultrasound image classification for breast lesions. 7
Although the ENAS method was proposed for designing the structure and weights of neural networks, 3 the idea of ENAS can be extended to design the structure and edge weights of any directed acyclic graph. Since the control system (CS) can be transformed into the form of a directed acyclic graph, this paper draws on the idea of ENAS to design the structure and parameters of the control system (CS) in an integrated manner, as shown in Figure 3.

The basic framework of the methodology in this paper.
In this paper, a controller design method based on the integration of structure search and parameter optimization is proposed to automate the controller structure design. The method introduces the idea of ENAS, which can search for the most suitable controller structure and complete parameter optimization in a relatively short time. In this paper, the galvano scanner in Maeda and Iwasaki’s paper 8 is selected as the research plant to verify the effectiveness of the method and compare it with the traditional full search-based method.
Controller structure automatic generation technology
Conversion method of control law and control system structure diagram
The central scientific and technical problem of this section is to transform the control system structure into a directed acyclic graph structure that the LSTM can handle.
A complex system structure diagram, the connection between its boxes is bound to be intricate, but the only three basic ways to connect the boxes are series, parallel and feedback connections. Therefore, the general method of simplifying the structure diagram is to move the lead or comparison points, exchange the comparison points, and perform box operations to merge the boxes connected in series, parallel and feedback. The principle of maintaining equivalent variable relationships before and after the transformation should be followed in the simplification process. Eventually, the structure of all closed-loop control systems can be expressed in the form of Figure 4.

Classic FB control system block diagram. 9
where
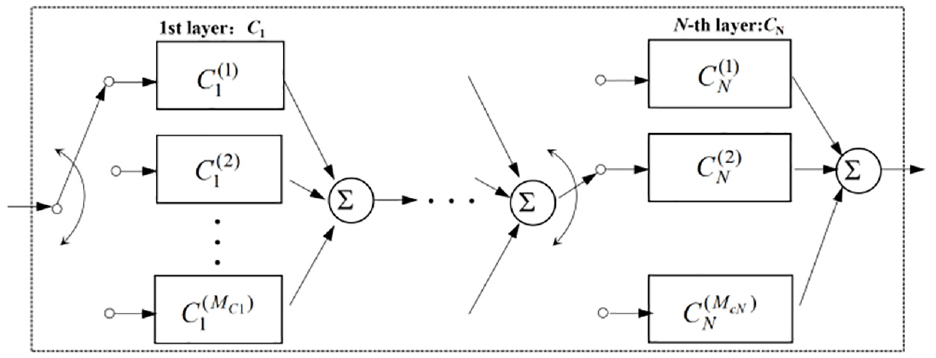
N-layer cascade structure controller block diagram. 10
Since the controller is a cascade structure, the transfer function

Here
The transfer function can be decomposed into the form of the product of N transfer functions according to the above method.
Structural modeling of control systems based on directed acyclic graphs
As mentioned above, an arbitrary controller can be written in the form of N transfer functions multiplied by each other. Further, we can convert the cascaded structure controller shown in Figure 5 into a directed acyclic graph, as shown in Figure 6, for comparison with the graph defined by Pham et al., 3 following the following steps:

Controller structure diagram.
Based on the above steps, the controller can be completely transformed into a directed acyclic graph. Then, the structure of this directed acyclic graph can be searched/optimized by the ENAS method.
Note that, as shown in Figure 6, we only convert the controller to a directed acyclic graph, while for the whole control system, it remains a directed cyclic graph structure.
Method for encoding topological relations of directed acyclic graphs
The encoding method for the topological relations of a directed acyclic graph as shown in Figure 6 is to generate an N-dimensional vector

Where
Thus, the number of all possible controller structures in the search space represented by this graph is
For example, the whole control system is 4-layer, if the diagram code is (1 3 2 2), it means that the first structure is selected for the first layer, the third structure is selected for the second layer, the second structure is selected for the third layer, and the second structure is selected for the fourth layer, as shown in Figure 7.

Example of diagram coding.
Controller design rules embedding method
As mentioned above, the transfer function of the controller can be decomposed into the form of a product of N transfer functions. Further, each part can be considered as a filter, and the design of the controller is actually the design of N filters. When designing a circuit for a filter, it is difficult to directly implement a circuit with a transfer function of order 3 or higher. When it is necessary to design a filter greater than or equal to 3rd order, it generally takes the form of decomposing the higher-order transfer function into the product of several lower-order transfer functions. For example, to design a 5th-order filter, two 2nd-order filters and a 1st-order filter cascade can be obtained. Common filters are: low-pass filter, high-pass filter, band-pass filter, band-stop filter (notch filter), all-pass filter, etc., as shown in Table 1.
Transfer function of typical filters.

For the actual plant to be controlled, determining the number and type of filters, etc. requires the use of rules and a priori knowledge from the controller design domain. At this point, we can embed these rules and a priori knowledge by adjusting the parameter range. For example: by analyzing the bode plot of the controlled plant, it is found that there are two wave peaks to be handled, we can set the number of filters as 2 and the frequency selection range of the filters as the periphery of the two wave peak positions respectively; according to the a priori knowledge, the improvement of the controller performance may require band-stop filters or all-pass filters, then the filters can be designed as

The change from BSF to APF can be achieved by first fixing
Automatic controller parameter optimization technique based on efficient heuristic search algorithm
General topology study of control systems
The structure of the controller varies significantly depending on the control theory on which the controller is based, and it is often very complex in engineering because of the need to solve various characteristic problems and constraint problems of the controlled plant. Based on this, we adopted the expression of a cascade controller. After analysis, it is believed that the classical multi-loop control systems and control laws can be basically transformed into this form.
In addition, for the actual control system, there are multiple high-frequency resonant mode disturbances in addition to the nonlinear characteristics. Therefore, when designing a controller, a basic controller is generally designed for completing the stability control, and then multiple filters are designed for each resonant mode to improve the overall performance of the controller. As shown in Figure 8. The basic controller can use PID controller, robust controller, LQR controller, sliding mode controller, etc.

Common topology for controller.
For example, the basic controller uses a PID controller and there are two resonant modes that need to be filtered, when C(s) can be designed as a cascade structured FB controller using a PID controller for the rigid mode and two second order filters for the first and second resonant modes. the mathematical expression of C(s) in the continuous time domain is defined by the following equation.



Filter structure design method
Taking into account the study of controller topology and the control law design domain rule embedding method this paper adopts the structure of multiple filters cascaded with three possible forms for each filter, as shown in Figure 9.

The filter structure in this paper.
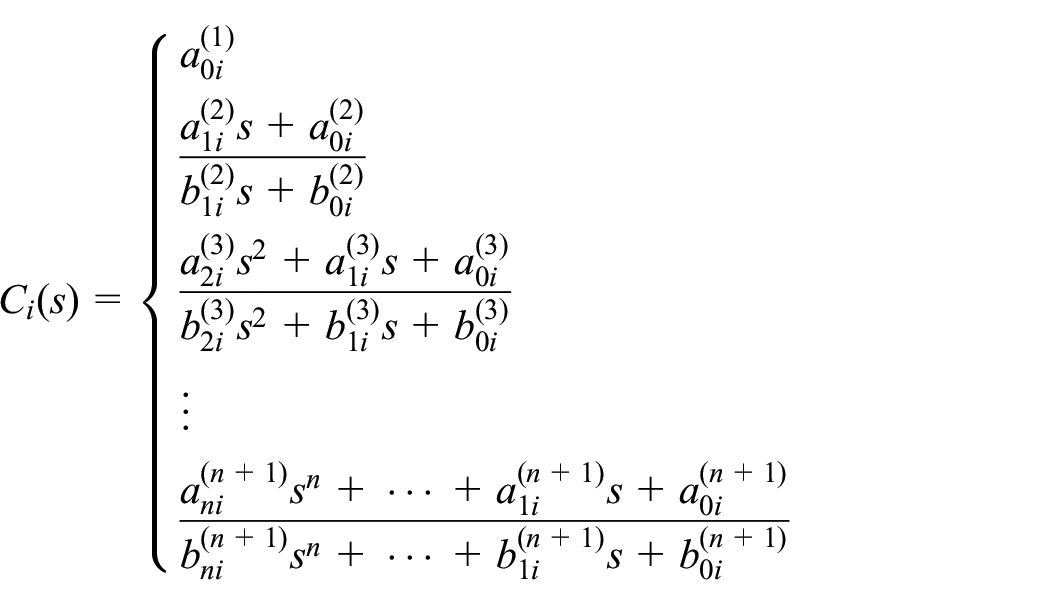
where the transfer functions of the three filters are:
(1) 0-order filter:
(2) 1st-order filter:

(3) 2nd-order filter:

It can be seen from the transfer functions of the three filters: the 0-order filter is equivalent to an all-pass filter with no change in phase; the 1st-order filter varies between an all-pass filter and a high-pass filter as
Controller parameter optimization method
After obtaining the structure and initial parameters of the controller, it is necessary to substitute this controller and parameters into the closed loop of the whole system, and to adjust and optimize the parameters of the controller.
In the control system shown in Figure 4,

The design problem of


The controller design method based on hybrid optimization uses different optimization methods to obtain the parameters of the cascade structure controller for the above two parts of the parameters, respectively. For the basic controller parameter
Selection of the fitness function and determination of important parameters
The most important requirement of the control system is fast and accurate, which requires the bandwidth to be as high as possible, but too much bandwidth can lead to system stability degradation, so the fitness (reward) function is selected considering both high bandwidth and sufficient stability margin, and we have determined the following forms of fitness functions:
(1) Summation type

where
(2) Additional bonus type



where 5 and 30° are referenced from the literature.
9
(3) Feasible domain type

The direct summation-type fitness function focuses too much on the bandwidth and ignores the gain margin and phase margin, and from the simulation results, the system is in the edge of stability in most cases. The feasible domain adaptability function varies too much in the feasible domain edge function value, which is easy to fall into the local optimum and not easy to find a better solution. By adjusting the extra reward value, the local optimal solution can be gradually transitioned to a better solution through genetic iteration. The extra reward value cannot be too large, which will lead to a local optimum, or too small, which will make the fitness function focus too much on bandwidth and ignore the system stability. Therefore the extra reward equation is a form of fitness function between the direct summation equation and the feasible domain equation. The actual reward value needs to be finally determined by repeated experiments.
The larger the number of populations in the genetic algorithm, the better the population diversity and the higher the probability of convergence to the global optimal solution, but the more computational resources are consumed. Taking into account the convergence of the genetic algorithm and the time overhead of the computational process, the number of populations in the genetic algorithm is set to 50, the number of elites is set to 7, the number of crossovers is set to 40, the number of variants is set to 3, the number of iterations is set to 2000, and other default settings are used.
Lightweight and efficient search method for overall optimization of controller structure and parameters
Design of LSTM networks
Following the ENAS approach proposed by Pham, the LSTM samples the decisions in an autoregressive manner by means of a Softmax classifier: the decisions from the previous step are embedded as inputs to the next step. In the first step, the controller network receives the empty embedding as an input. For the control system, what needs to be determined is the number of filters and the order of each filter. The number of filters generally depends on the needs of the actual problem.
The filters are divided into 0-order, 1st-order, and 2nd-order, so the number of output categories of LSTM is 3. Assuming that the number of filters is N, as in Pham et al.’s original paper, 3 the input size of LSTM is 1, and the length of the input stream is N, which denotes N filters, respectively. As shown in Figure 10(a) represents the sampled output results of the LSTM recurrent cell, and (b) represents the filter structure corresponding to the output of the LSTM recurrent cell. Note that the input of the initial recurrent cell is 0 and the output is 3-category probability. After sampling out the first filter structure as a 1st order filter, this is used as the input to transmit to the recurrent cell, and then the 3rd-order filter is sampled from the output of the 3-category probability, and so on.

An example of an LSTM recurrent cell: (a) the sampled output results of the LSTM recurrent cell and (b) the filter structure corresponding to the output of the LSTM recurrent cell.
Pham et al. used an LSTM with 100 hidden units in the original paper. 3 Comparing the size of the problem in this paper with Pham et al.’s paper, we use an LSTM with 10 hidden units.
Overall training scheme for controller structure search and parameter optimization
Throughout the training process, there are two sets of learnable parameters: the parameters of the LSTM are denoted by
Train the filter with shared parameters
In this step, fix Generator’s policy
Train the generator parameters
In this step, fix

Where
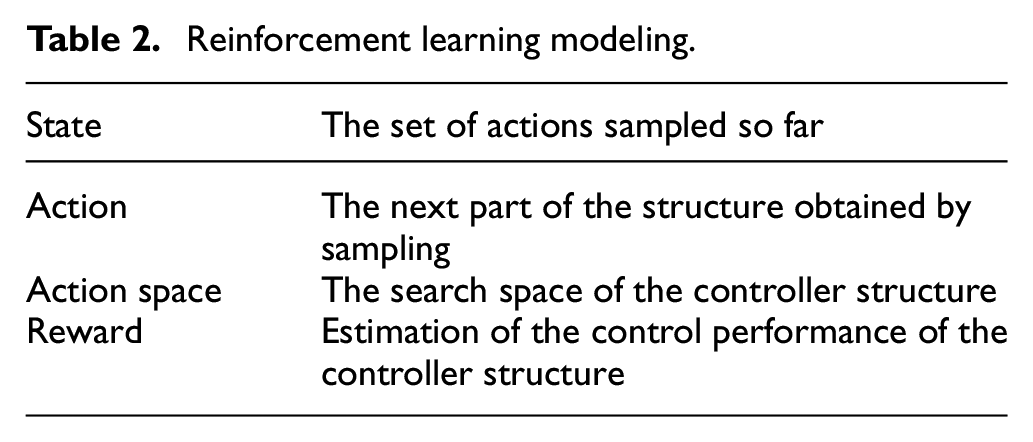
In order to model the problem as a reinforcement learning problem, it can be assumed that the generation of the controller structure is the action of an agent whose action space is the same as the search space of the controller structure. The “reward” of the agent is based on the estimation of the control performance of the controller structure. The policy samples various “actions” to sequentially generate the controller structure, and the “state” of the environment consists of the set of actions sampled so far, and is rewarded only after the final action. As shown in Table 2.
Reinforcement learning modeling.
Determining the optimal architecture and parameters
After the overall training for controller structure search and parameter optimization, we first select the controller structure with the highest probability from the trained strategy
The whole process is shown in Figure 11.

Training framework.
Selection of the optimizer and determination of important parameters
Currently, the mainstream optimizers are stochastic gradient descent (SGD), 11 momentum stochastic gradient descent (SGDM), 12 adaptive gradient descent (Adagrad), 13 root mean square propagation optimization (RMSProp), 14 and adaptive moment estimation optimization (Adam). 15
The five major optimizers are actually divided into two categories, SGD, SGDM, and Adagrad, RMSProp, Adam. the more used ones are SGDM and Adam. as shown above, SGDM is more used inside computer vision (CV), while Adam basically sweeps natural language processing (NLP), reinforcement learning (RL), generative adversarial networks (GAN), and Speech synthesis and other fields. For example, in the field of NLP, the classical models Transformer and BERT all use Adam, and its variant AdamW.
In this paper, the controller structure is generated in LSTM, which is different from all of the above application areas and requires several experiments to determine the specific problem. The LSTM can be trained with input weights, recurrent weights and bias parameters. The input weights are initialized using the Glorot initializer (also known as the Xavier initializer). The Glorot initializer samples independently from a uniform distribution with mean zero and variance 2/(inputsize+numout) (inputsize for this part of the LSTM is 1), where numout = 4* numhiddenunits. For the initialization of the cyclic weights the orthogonal matrix Q given by the QR decomposition of the random matrix Z sampled from the unit normal distribution is used. For the bias, we use 1 to initialize the oblivious gate bias and 0 for the rest of the bias.
Simulation example
Target plant
This example draws on the laboratory galvano scanner of the laser processing machine in Makoto Iwasaki’s paper as the target plant under control. The galvano scanner consists of a rotating motor, a mirror, and an optical encoder, and fast response and high-precision control of the motor angle is required to achieve high productivity in high-density interconnect (HDI) printed circuit boards.
The mathematical model used in this example is structurally typical in that it can simulate both delay characteristics and high frequency disturbances. It has a primary resonant mode of 2960 Hz and a secondary resonant mode of 6100 Hz. The transfer function of the system is as follows:

The parameters are shown in Table 3.
Parameters of the target plant model.

Its Bode plot is shown in Figure 12.

Bode plot of the target plant.
Filter structure design
This example uses a structure with two filter cascades, each with three possible forms, for a total of nine possible structures, as shown in Figure 13. The basic controller uses a PID controller with a low-pass filter with a transfer function of the form:


The filter structure used in this example.
Therefore, the basic controller parameters
Parameter range of

From Tables 3 and 4, it can be seen that the first filter is mainly for the first resonant mode and the second filter is mainly for the second resonant mode. From the transfer functions of the three filters, it can be seen that: the zero-order filter is equivalent to an all-pass filter with no phase change; the first-order filter varies between an all-pass filter and a high-pass filter as
Hybrid optimization-based controller design method and selection of fitness function
From the analysis in previous section it can be seen that the parameters to be optimized are
Based on iterative experiments, the final fitness function is determined as:



Design of LSTM networks and selection of optimizers
For the controlled object of this example, the number of filters is determined to be 2, and what needs to be determined is the order of the two filters.
The number of output categories of the LSTM is 3, representing three filters. the input size of the LSTM is 1, and the length of the input stream is 2, representing two filters respectively. The number of hidden cells is 10. The network architecture is shown in Figure 14.

The architecture of this LSTM.
Figure 15 shows an example where (a) represents the filter structure corresponding to the output of this LSTM recurrent cell, and (b) indicates that the sampled output results of this LSTM recurrent cell.

An example of this LSTM recurrent cell: (a) the sampled output results of this LSTM recurrent cell and (b) the filter structure corresponding to the output of this LSTM recurrent cell.
For the optimizer, the learning rate is experimentally found to be the key parameter. Too high a learning rate will lead to too fast convergence, and the Generator may not search sufficiently for various structures and may even converge to non-optimal structures; too low a learning rate will lead to insignificant convergence. To achieve a lightweight optimizer, the SGDM is modified as follows, drawing on Adam’s idea:

The decay of the learning rate is linked to the number of iterations, which not only realizes the adaptive update of the learning rate, but also makes the decay process of the learning rate smoother. After several experiments, the initial learning rate
Results
Set the number of LSTM network update iterations to stop when a certain structure reaches 100 first. The results are as follows:
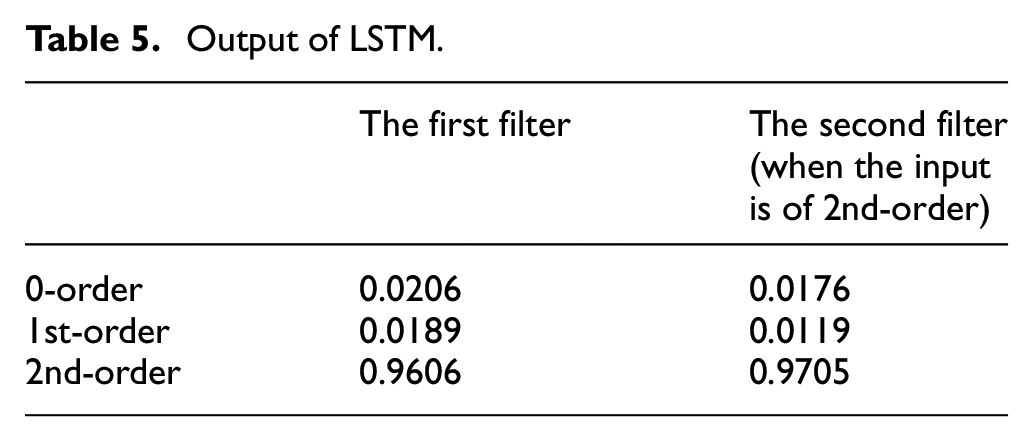
As can be seen in Figure 16, the filter structure converges to the 2nd order-2nd order form. the output of the LSTM is shown in Table 5. Figure 17 shows the comparison of the Bode plot before and after filtering, where SG1 and SG2 denote the sensitivity gain at the two resonant frequencies, respectively, and it can be seen that the first resonance frequency has a significant decrease in sensitivity, while the second resonance frequency has a small decrease in sensitivity.

Simulation results: (a) number of iterations per structure, (b) loss function with baseline, (c) output of the first time step of the LSTM, and (d) output of the second time step of the LSTM.
Output of LSTM.
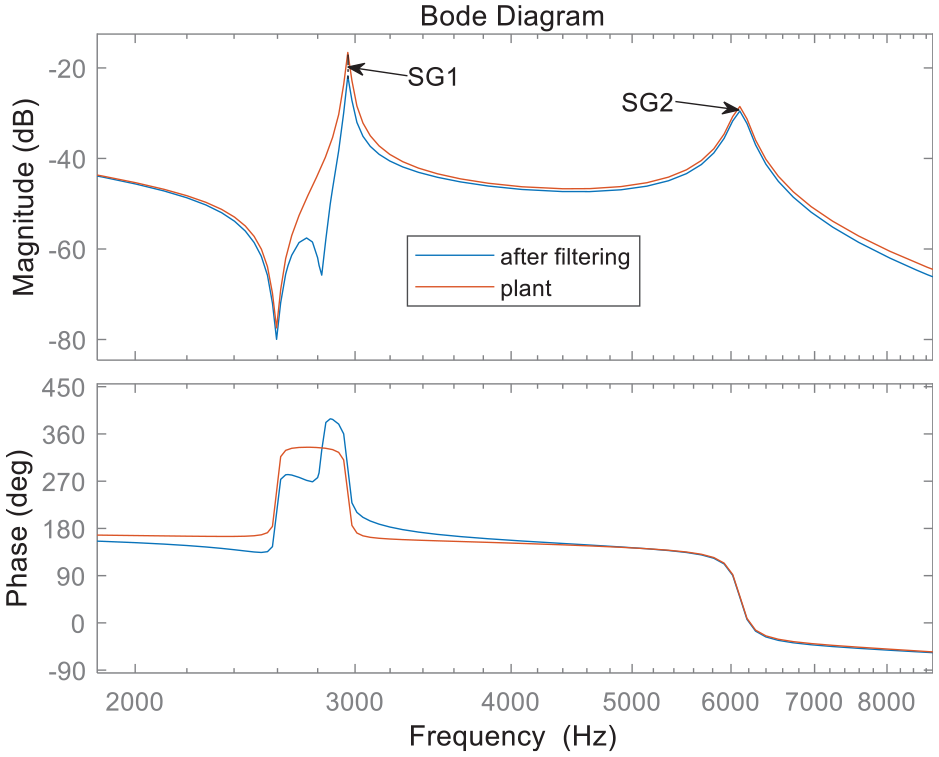
Comparison of Bode plot before and after filtering.
For comparison, the conventional exhaustive method was used for the experiments, and the results are shown in Table 6. It can be seen that: (1) The optimal structure form is PID-2nd-2nd; (2) The structure of the first filter is critical to the system bandwidth; (3) The controller structure search and parameter optimization method used in this example can effectively converge to the optimal structure, and the control performance is close to the optimal control performance of the full-search method; (4) Compared to the full-search method, the number of iterations and the time consumed by the method used in this example is only 15%.
Comparison of simulation results of two methods.

Table 7 shows the comparison of simulation results using different fitness functions, from which it can be seen that: (1) The
Comparison of different fitness functions.

In addition, for the structure search method, Maeda et al. used GA to implement it, where he viewed all possible structures as individuals in a population and selects the optimal structure through repeated iterations. 10 Compared with the LSTM-based structure search method proposed in this paper: (1) The scalability of structure search based on GA is not good, which is not efficient in dealing with multiple controllers in cascade, whereas the method in this paper can handle it easily; (2) The structure search based on GA can not reflect the correlation between substructures, whereas the LSTM can model the correlation between each time step, and it is more interpretable.
Conclusion and outlook
Conclusion
In this paper, a controller design method based on the integration of structure search and parameter optimization is proposed, which can find the most suitable controller structure and complete parameter tuning in a shorter time compared with the traditional full-search based method, and meet a specific stability margin while extending the control bandwidth, which can significantly improve the efficiency of controller designers. The validity of the method was verified on a galvano scanner.
Outlook
The next step can be further investigated in the following aspects:
(1) Embedding more rules of the controller structure design domain and adopting a more complex way of describing the controller structure to make it closer to the actual application scenarios.
(2) Researching on the encoding of directed cyclic graphs, which can be applied to controllers that introduce feedback structures, allows a wider range of structure search.
(3) Selecting more complex controlled objects, such as variant vehicles.
(4) Parameter optimization can use other heuristic algorithms.
(5) Accomplish more complex control objectives.
Footnotes
Handling Editor: Chenhui Liang
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This research is supported by the science and technology innovation 2030 - “new generation artificial intelligence” major project (2018AAA0101605), the Tsinghua University Initiative Scientific Research Program (No. 20234616001) the National Natural Science Foundation of China (No. 61771281, No. 61174168).