
Abstract
The article presents an application of neural network to an electromagnetic direct drive vehicle robot driver. To achieve the accuracy and adaptability of speed control for driving vehicle with manual transmission and automatic transmission in various test conditions, a new neural network–based speed control method of the direct drive vehicle robot driver is presented. The mechanical actuators of the direct drive vehicle robot driver are directly driven through electromagnetic linear actuator. The coordinated control system structure of the direct drive vehicle robot driver is described. The mechanical actuators include the driving mechanical legs and the shift manipulator of the direct drive vehicle robot driver. The driving mechanical legs are consisted of the throttle mechanical leg, the brake mechanical leg, and the clutch mechanical leg. The displacement of the mechanical actuators represent the displacement of the driving mechanical legs, and the displacement of the shift manipulator. The number of the network hidden node is five, and a tangent transfer function is used as the neurons transfer function. The actual vehicle speed is as the variable of the network output layer, and a linear transfer function is as the neurons transfer function. The neural network training algorithm adopts the Levenberg–Marquardt training algorithm. The vehicle tests manipulated by the robot driver in different driving conditions are conducted. The proposed control method of the robot driver is verified and compared with the performances of other control method and human driver.
Introduction
With the development of the automotive industry, the requirements of vehicle performance are increasing. The vehicle development requires a lot of vehicle tests. It takes much time for vehicle test. 1 It has the characteristics of saving time, saving effort, and safety that conducts automotive test on chassis dynamometer. In the case of that the vehicle test is conducted by a human driver, the driving behavior of the human driver causes statistical and systematic errors. The different driving skills and physiological and psychological factors of the human driver affect the results of vehicle test. Besides, the test environment is very poor and dangerous, so that it is suitable for robot to conduct the automotive test.2,3
Vehicle robot driver is a robot which can be equipped in a vehicle cab without any modification. 4 It can be used to conduct autonomous driving replace of a human driver. Because of the vehicle is not required to be modified, and the robot driver can be directly installed in the different vehicle cab, its related technologies can be applied to emission durability test, vehicle performance test, vehicle noise test, high- and low-temperature environment test, vehicle road test, vehicle bench test, autonomous vehicle, intelligent vehicles, and other fields. 5 The drive way of the vehicle robot driver includes hydraulic drive, pneumatic drive, and servo electric drive. It is steady for hydraulic drive. However, an oil cylinder is necessary for hydraulic drive.6,7 It is not easy for pneumatic drive to accurate positioning and the real time. As a driving device of the vehicle robot driver, servo electric drive needs a mechanism of rotary motion into linear motion. 8 Electromagnetic linear motor can solve the shortcomings of three other drive styles. It can improve the transmission efficiency and transmission accuracy and make the transmission mechanism simple.9–12
Electromagnetic direct drive vehicle robot driver must achieve accurate vehicle speed tracking in various driving conditions. It is necessary for the direct drive vehicle robot driver to complete both motion control for the robot mechanical actuator and automatic driving of vehicle. There have already been various speed control approaches for the robot. X Chen et al. use variable parameter proportion, integral, derivative (PID) control to achieve speed tracking of robot driver. But the controller parameter requires manual tuning and the speed fluctuation is large. 13 S Sailer et al. design a speed tracking control approach of throttle pedal based on flatness. However, largest model of the approximated engine torque is inaccurate, and the online adaptation is poor. 14 C Chambers et al. present a PID controller used for autonomous vehicle. However, the controller accuracy and the nonlinearity in the switching between braking and throttle are poor. 15 G Chen and W Zhang 1 proposed a hierarchical coordinated control method of the robot based on fuzzy logic theory, and the fuzzy speed controller is designed. However, it is very difficult to obtain the fuzzy control rules, and it lacked an effective learning mechanism. G Chen and W Zhang 2 made digital prototyping design of the robot and conducted the virtual prototype simulation and structure finite element analysis of the key components. G Chen and W Zhang 3 presented a prototype simulation system for driving performance of the robot, and the driving performance of the robot can be evaluated by the prototype simulation system. However, the intelligent speed control of the robot is not discussed in the G Chen and W Zhang.2,3 The speed tracking control of the direct drive robot driver has characteristics of nonlinearity, time-varying, and time delay, and it is difficult to establish the precise mathematical model. The neural network provides a solution to the speed tracking control. The convergence rate of the neural network using a Levenberg–Marquardt algorithm is fast, and it has strong generalization ability.16–19 The neural network model is established using experimental data, and it does not require precise mathematical model of the speed tracking control and has a strong self-learning ability.
In this article, a new neural-network-based speed control method of the direct drive robot driver is presented. The direct drive vehicle robot driver adopts an electromagnetic linear actuator as the drive mechanism. The robot mechanical actuators are directly driven through the electromagnetic linear actuator. The coordinated control system structure of the direct drive vehicle robot driver is presented. The neural network–based speed control model is presented. The experiments of actual vehicle with manual transmission and automatic transmission manipulated by the robot driver in various driving conditions are conducted. Experiment results verify the validity and adaptability of the presented method.
System structure
Electromagnetic direct drive vehicle robot driver consists of the throttle mechanical leg, the brake mechanical leg, the clutch mechanical leg, the shift mechanical arm, the computer control system, and the drive equipment. The direct drive vehicle robot driver physical model is shown in Figure 1.
2
The direct drive vehicle robot driver adopts an electromagnetic linear actuator as the drive mechanism. The throttle mechanical leg, the brake mechanical leg, the clutch mechanical leg, and the shift mechanical arm are directly driven through the electromagnetic linear actuator. It does not need any intermediate conversion mechanism. The mechanism diagram of the direct drive vehicle robot driver is seen in Figure 2. For the shift manipulator,
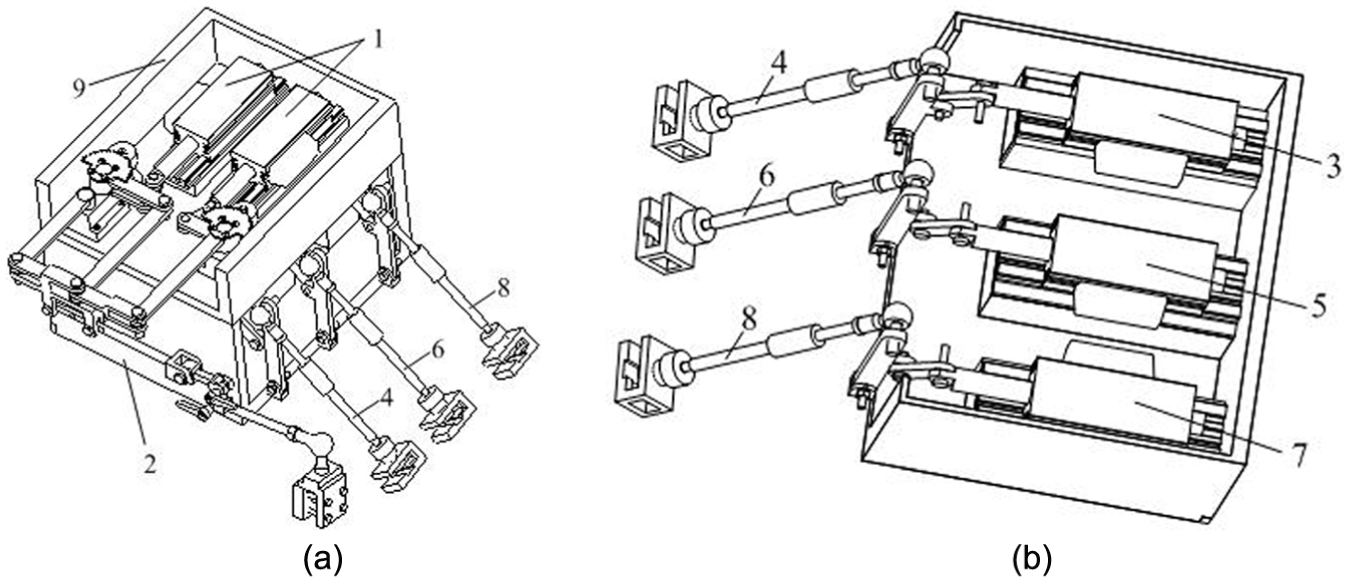
The direct drive vehicle robot driver physical model: (a) overall structure and (b) mechanical leg internal structure.

The direct drive vehicle robot driver mechanism diagram: (a) the shift manipulator mechanism diagram and (b) the mechanical leg mechanism diagram.
The method
The direct drive vehicle robot driver must manipulate an automobile according to a given driving test condition. 20 The coordinated control system structure for the direct drive vehicle robot driver is shown in Figure 3. The actual vehicle speed, the actual engine speed, the actual clutch position, the actual brake position, the throttle position, and the actual gear are collected to the multiple manipulators coordinated control model. According to the input data of the driving test condition pre-entered to memory, the actuator command signals are calculated. The control system for the direct drive vehicle robot driver realizes the measurement and control of the mechanical actuators.

The coordinated control system structure for the direct drive vehicle robot driver.
The Levenberg–Marquardt algorithm is a very effective method for the design optimization. Therefore, in this article, a new neural network–based speed control method of the direct drive vehicle robot driver using the Levenberg–Marquardt training algorithm is established. The error indicator is defined as

where

where

where

For the equation (2), it is necessary for the matrix of
If

Let




then

The new weight adjustment equation

For equation (11), it is necessary conduct inversion calculation of

According to the weights adjustment of equation (12), the speed of matrix inversion is accelerated. If the number of the network output

The speed tracking neural network control model structure for the direct drive vehicle robot driver.
The variables of input layer for the speed tracking neural network control model are the displacement of the robot mechanical actuator, that are the throttle pedal opening degree, the clutch pedal position, the brake pedal position, and the gear for the vehicle. After obtaining the input and the output variables, the standardization pretreatment is conducted. The data of the input and the output are normalized to

where
Experimental verification
The experiment
To verify the validity of the presented method of the direct drive vehicle robot driver, in line with the required national standards, 20 the experiments of actual vehicle with manual transmission and automatic transmission manipulated by the robot driver in various driving conditions are conducted. The test process is seen in G Chen and W Zhang. 1 The robot prototype installed in a cab of test vehicle with manual transmission and the vehicle test is seen in Figure 5. The speed of the test vehicle is measured through a sensor equipped in front drum of chassis dynamometer. The gear shift of the test vehicle is measured through an angular transducer equipped in the shift manipulator. The position of the test vehicle pedal is measured through linear displacement sensor equipped in the driving mechanical leg for throttle, brake, and clutch. The input data of the presented neural network speed control system for the direct drive vehicle robot driver are shown in Figure 6.

The robot prototype and vehicle test: (a) the robot prototype and (b) the vehicle test.
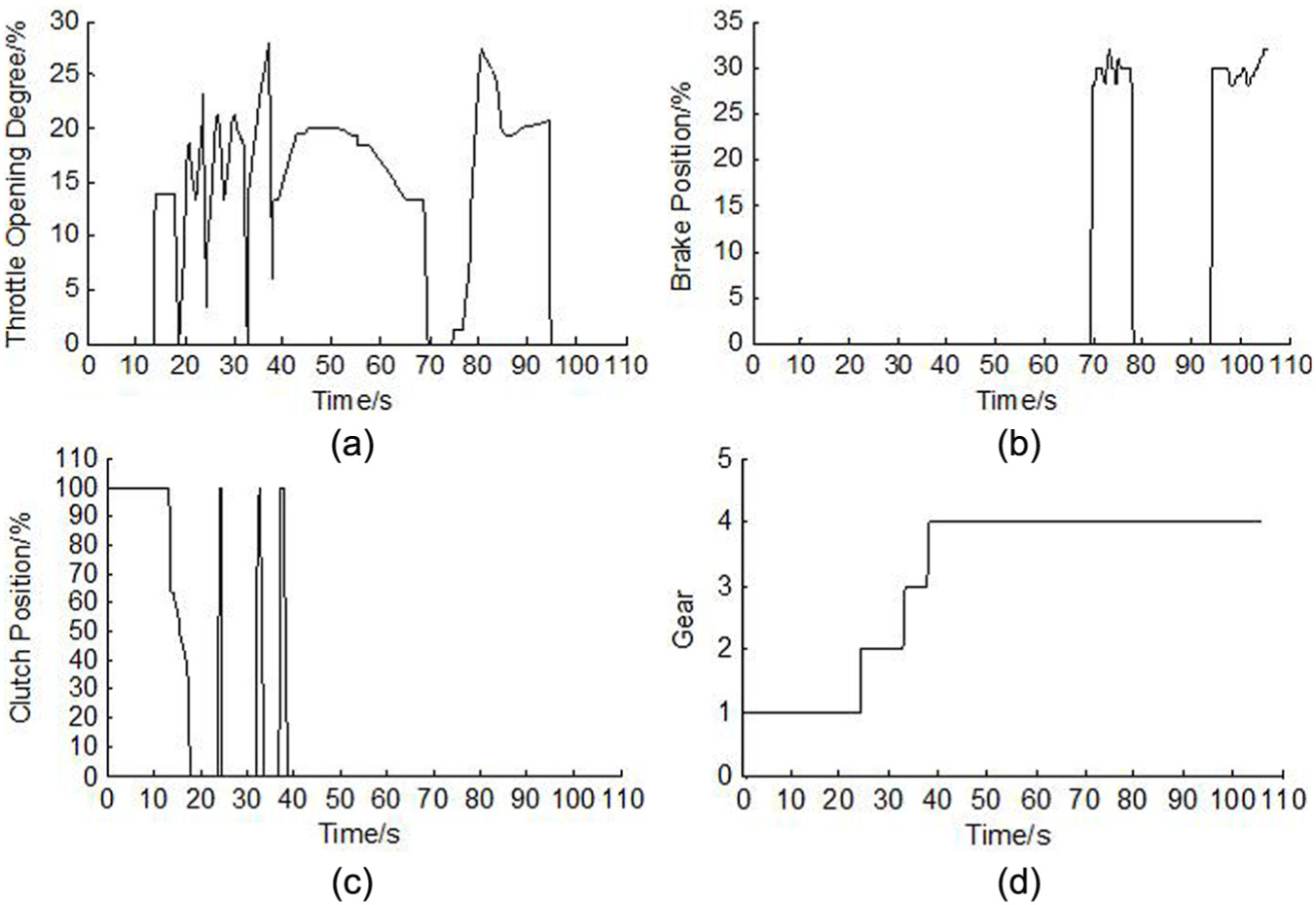
The input data of the neural network speed control system for the direct drive vehicle robot driver: (a) the opening degree of throttle mechanical leg, (b) the displacement of brake mechanical leg, (c) the displacement of clutch mechanical leg, and (d) the displacement of shift manipulator.
The displacement of the driving mechanical leg including throttle and brake and clutch, the displacement of shift manipulator, and the speed of the test vehicle are acquired real time. Two hundred and sixty-four sets of the test sample are collected. It is adapted as the input of the neural network speed control system for the direct drive vehicle robot driver. The test data are divided into three parts, which is used to train the neural network model, validate the neural network model, and test the neural network model. Sixty-six test data are used to validate the neural network model, sixty-six test data are used to test the neural network model, and other test data are used to train the neural network model. The training sample data, the validation sample data and the testing sample data are selected from the acquired test data using intervals method. The neural network speed control model is trained through the sample data. Normalized test data are used for the training of the network.
Results and analysis
To verify the validity of the presented method, the mean squared error of the proposed network is shown in Figure 7. Figure 7 shows that the convergence rate of the proposed speed control neural network is fast. With the increase in the training time, the network error decreases. And the characteristics of the validation error are similar to that of the testing error. The results show that the proposed method is effective.

The mean squared error of the proposed speed control neural network of the direct drive vehicle robot driver: (a) the whole comparison curve and (b) the partial comparison curve.
To further verify the validity of the presented method, the comparison of speed tracking performance among the direct drive vehicle robot driver using gradient descent method and the direct drive vehicle robot driver using the proposed method and a human driver 21 is analyzed. The comparison of speed tracking results in 48 km/h driving cycle condition is shown in Figure 8. Figure 8 shows that it is impossible for human driver to accurately conduct vehicle test in the light of the test standards. In addition, the driving behavior of the human driver is influenced by driving experiences and skills, test environment, psychological and physiological factors, and other factors, which lead to the bad repeatability. The speed fluctuation using neural network control using gradient descent method is very large. The error of speed tracking is more than ±3 km/h, which is bigger than that of test standard requirement that is ±2 km/h. The presented method can accurately achieve the speed tracking. The speed tracking error is smaller than ±2 km/h; the maximum error of speed control is 1.5 km/h, so that it can meet the vehicle test standard.

The speed tracking comparisons: (a) the whole comparison curve and (b) the partial curve comparison.
To verify the adaptability of the presented method, the test results of the direct drive vehicle robot driver through the presented method in 64 km/h driving cycle condition is shown in Figure 9. Figure 9 shows that in various driving conditions, the direct drive vehicle robot driver by means of the presented method can achieve vehicle start control, vehicle accelerating control, vehicle shift control, and vehicle deceleration control. The repeatability of the speed tracking control for the direct drive vehicle robot driver in various driving conditions is good.

The test curve using the presented method in 64 km/h driving cycle condition.
After deleting the clutch mechanical leg of the direct drive vehicle robot driver, the robotic system can drive a test vehicle with an automatic transmission in line with test standards. 20 In addition, to verify the validity and adaptability of the presented method, the test results of the vehicle with automatic transmission manipulated by the direct drive vehicle robot driver by means of the presented method are seen in Figure 10. It can meet the test standard requirements, and the adaptability and effectiveness of the presented method is verified again.

Speed tracking results of a vehicle with automatic transmission driven by the robot using the presented method.
Conclusion
A new neural network–based speed control method of an electromagnetic direct drive vehicle robot driver is presented in this article, so that it can the accuracy and adaptability of speed control for driving vehicle with manual transmission and automatic transmission in various test conditions. The direct drive vehicle robot driver adopts an electromagnetic linear actuator as the drive mechanism. The mechanical actuators of the direct drive vehicle robot driver are directly driven through the electromagnetic linear actuator. The coordinated control system structure of the direct drive vehicle robot driver is presented. The displacement of the mechanical actuators including the driving mechanical legs and the shift manipulator is used as the variables of the network input layer. The speed control neural network model of the direct drive vehicle robot driver is established.
The experiments of actual vehicle with manual transmission and automatic transmission manipulated by the direct drive vehicle robot driver in different conditions are conducted. Experimental results show that it is impossible for human driver to accurately conduct vehicle test in the light of the test standards. In addition, the driving behavior of the human driver is influenced by driving experiences and skills, test environment, psychological and physiological factors, and other factors, which lead to the bad repeatability. The speed fluctuation using neural network control using gradient descent method is very large. The error of speed tracking is bigger than that of test standard requirement. The direct drive vehicle robot driver by means of the presented method can achieve vehicle start control, vehicle accelerating control, vehicle shift control, and vehicle deceleration control. The repeatability and adaptability of the accurate speed tracking control for the direct drive vehicle robot driver with the presented method in various driving conditions is good. The validity of the presented method is verified in various test conditions.
Future works
Future research will focus on the influence of different driving styles, driving behavior, and driving habits on test results. Besides, the electromagnetic direct drive vehicle robot driver will be applied to autonomous vehicle and outdoor environment road test will be conducted. Finally, the stability of the proposed method will be theoretically proved, and the real time of the method will be improved.
Footnotes
Handling Editor: Jose Antonio Tenreiro Machado
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This project is supported by National Natural Science Foundation of China (grant no 51675281 and 51205208), Six Talents Peak Project of Jiangsu Province (grant no 2015-JXQC-003), and The Fundamental Research Funds for the Central Universities (grant no 30916011302).