
Abstract
Pedestrian is an important factor for traffic safety and capacity in the sections mixed with bicycle. It is important for improving active safety to implement timely pedestrian safety warning under the condition of Internet of pedestrian and bicycle. The mutual influence of pedestrian and its surrounding traffic participants in mixed pedestrian-bicycle sections was comprehensively analyzed, and the phase of pedestrian-bicycle traffic was partitioned and reduced on the basis of previous researches and phase-field coupling theory. Fuzzy logic method was used to build the pedestrian movement intention identification model. The pedestrian safety and the satisfaction for walking speed and space were synthetically considered in this model. The experimental verifications show that the result of pedestrian movement intention identification model is consistent with the actual situation, and this study can provide theoretical support for the realization of the pedestrian active safety under the condition of Internet of Things.
Introduction
The rapid development of automobile industry has caused car ownership to increase significantly. As a result, the motorway in many cities is constantly broadened, the slow traffic land for pedestrian and bicycle is squeezed gradually, and the conflict between bicycle and pedestrian is becoming more and more serious. Pedestrian has become an important factor affecting traffic safety and traffic capacity in mixed pedestrian-bicycle sections. The extensive use of mobile sensor devices (smart phone, etc.) equipped with Global Positioning System (GPS) and the vigorous development of the Internet of Things can provide powerful guarantee for the study of improving active safety through timely warning and the synergy between pedestrian and bicycle. Pedestrian movement intention is a plan about the direction, stride, and frequency for the next step when human walks. How to predictably and dynamically identify pedestrian movement intention in pedestrian-bicycle mixed environment is a core problem of science which needs to be solved urgently.
Domestic and foreign experts and scholars have done a lot of researches on pedestrian behavior in different scenarios including city roads, transport stations, large venues, and emergency evacuation, and the main research method is to construct pedestrian microscopic simulation model. The main models are cellular automaton model and mechanical model. With relatively simple rules and high operation efficiency, the cellular automaton model1–6 can simulate the complex pedestrian flow phenomenon. It can be used for the analysis of unidirectional, bidirectional, and multidirectional pedestrian flow, and it is suitable for the pedestrian behavior simulation of large-scale scenes. However, its algorithm result is unpredictable and the diverse prediction result only has statistical significance. The states of all pedestrians in the grid are updated and at the same time, it only shows the evolution of pedestrian state, and it is difficult to reflect the interaction between pedestrians. In addition, the pedestrian movement space is divided into grid, and the speed is solidified to be integer multiple of the grid width due to the limitation of the grid, thus the accuracy of the model is affected. The main representatives of the mechanical model are magnetic force model proposed by S Okazaki and colleagues7–11 and the social force model proposed by H Dirk and colleagues.12–18 The core idea of them is to calculate the force of pedestrians, and then calculate the acceleration, velocity, and displacement. The magnetic force model is simple and easy to be understood. However, the model parameters lack corresponding setting standard and they are difficult to verify. And the parameters can only provide visual graphics, but cannot give more conclusions. The social force model can reproduce a variety of phenomena of pedestrian traffic, such as the self-organization phenomenon of pedestrians and the oscillations at the bottlenecks. The model can reflect the interaction between pedestrians, but due to the large amount of computation, the low efficiency, and the complex rules, the computation speed exponentially decreases with the increase in the number of pedestrians. The equations in the model are continuous, and the analytic solutions cannot be obtained. In addition, L He et al. 19 established a microscopic pedestrian model based on dynamic generalized potential field, and the pedestrian speed and space occupancy were dynamically considered in the model. Both computational efficiency and accuracy of the model are better, but the other pedestrians are converted into fixed obstacles to study their impact.
Domestic and foreign experts and scholars do not pay enough attention to the safety problems of pedestrians and bicycles in the mixed environment. And limited to the difficulty and complexity in acquiring physiological, psychological, and physical parameters of pedestrians and cyclists in real time, the study of the traffic characteristics and the interaction mechanism between traffic participants in mixed pedestrian-bicycle sections are rare. M Graw and H Konig 20 analyzed and discussed the causes and types of the pedestrian and bicycle accident by reconstructing the pedestrian and bicycle collision accident process. T Peter et al. 21 made statistical analysis on pedestrian injury situations caused by pedestrians and bicycles in New York and California, analyzed the causes of accidents, and put forward a series of suggestions for the design of the infrastructure. Q Cai et al. 22 explored the viability of dual-state models (i.e. zero-inflated and hurdle models) for traffic analysis zones–based pedestrian and bicycle crash frequency analysis. In the models, spatial spill-over effects were explored by employing exogenous variables from neighboring zones. The model results clearly highlighted the importance of various traffic, roadway, and sociodemographic characteristics of the traffic analysis zone as well as neighboring traffic analysis zones on pedestrian and bicycle crash frequency. C Siddiqui et al. 23 investigated the effect of spatial correlation using a Bayesian spatial framework to model pedestrian and bicycle crashes in traffic analysis zones. And the results implied that spatial correlation should be considered while modeling pedestrian and bicycle crashes at the aggregate or macro-level. A Richard et al. 24 proposed a cross-comparison of different estimation methods to model pedestrian and bicycle crashes and examined the association of various planning factors including traffic exposure, socio-economic, and land-use characteristics with pedestrian and bicycle crashes to identify the factors influencing the occurrence of pedestrian and bicycle crashes at the planning level. L Kang et al. 25 studied how pedestrians perceive level of service (LOS) on sidewalks shared with bicycles under various urban-street conditions. The results showed that the bicycle characteristics such as bicycle flow rate, maximum speed, and bicyclists riding against the pedestrian flow all have a strong negative impact on pedestrian perceptions of LOS. L Kang et al. 25 found several important factors that affect the pedestrian perception of LOS by analyzing the impact of the bicycle in the mixed pedestrian-bicycle section. J Chen and Z Xie 26 established a road traffic conflict intensity model on shared-use paths based on bicycle-pedestrian passing conflict model and bicycle-pedestrian meeting conflict model. J Deng 27 set up a multi-scale and multi-neighborhood-rule cellular automaton model to study the pedestrian-bicycle mixed traffic on the shared-use sidewalks. The differences of the geometric dimensions, cellular state value, and neighborhood definition between bicycle and pedestrian were considered in this model, and it can describe the phenomenon of the mutual interference of the two modes of transportation. Although the interaction between pedestrian and bicycle has been analyzed and discussed in the existing researches, the conclusions are mostly macro-description such as the relationship of the number of conflict, the blocking probability, and the traffic flow characteristics, and the internal mechanism of the interaction between pedestrians and bicycles is not explained.
Based on active safety of pedestrian, we aimed at accurately identifying the pedestrian movement intention in mixed pedestrian-bicycle environment. It can be used to foresee danger in time and implement timely warning for reducing/avoiding risk and improving security and comfort of traveling. The behaviors of pedestrian flow including unidirectional, bidirectional, and even multidirectional pedestrian flow, queuing pedestrian flow, and emergency evacuation pedestrian flow were studied in the existing pedestrian movement model. There are also many researches on the influence of fixed obstacles in walking environment. But existing researches failed to effectively distinguish the influence of other pedestrians and fixed obstacles on the movement of target pedestrian. The research on movement behaviors of traffic participants in mixed pedestrian-bicycle sections is rare. Bicycle is very different from pedestrian in speed and size, and the research about its influence on pedestrian is much less. The research on dynamic identification of pedestrian intention in mixed pedestrian-bicycle sections is started in view of the gap and insufficiency of the core problems of science. Extensive observation experiments are carried out, and the data of interaction between pedestrian and other traffic participants are captured from videos. The characteristics of each moving participant and the influence factors of pedestrian movement intention are analyzed, and the interaction mechanism of participants in the mixed pedestrian-bicycle section is interpreted. To simplify complexity of the model and improve the computation efficiency, the phases of mixed pedestrian-bicycle traffic flow are partitioned and reduced on the basis of phase-field coupling theory. Because of the generation and evolution of pedestrian behavior based on the inaccurate perception of traffic situation in real life, the pedestrian movement intention identification model in mixed pedestrian-bicycle sections is established based on fuzzy inference method.
Methods
Phase-field coupling theory
Phase-field coupling theory is used to simulate the evolution process of phase microstructure, and the main characteristic is that the continuous variables are introduced to describe the new and the old phases based on Ginzburg–Landau theory of phase transitions 28 and the diffusion interface model. That is, a certain phase was shown, there must be a specific field, on the contrary, with a certain field, there must be carried in a certain phase. The phase-field coupling theory and the concept of traffic situation in literature29,30 are referenced to propose the concept of the pedestrian-bicycle phase field for the mixed pedestrian-bicycle section. The mixed pedestrian-bicycle phase field has two concepts of phase and field. The mixed pedestrian-bicycle phase is the total situation, and the scene when pedestrians and bicycles travel together is composed of their relative space–time relationship, the state of bicycle and its cyclist, and other environmental factors. This phase is supported with the field formed by mutual attraction and repulsion between pedestrian and bicycle and its cyclist. The diversity of the physiological and psychological characteristics of pedestrians and cyclists and the complexity of speed, acceleration, and movement trajectory, as well as the variability of the above factors and their interaction, determine the instantaneous stability of the traffic phase and its coupling corresponding field, and they also determine generation, emergence, growth, transfer, and other evolution of the phase field.
Mixed pedestrian-bicycle phase partition
There are many great influencing factors on the pedestrian movement intention in mixed pedestrian-bicycle sections; the possible mixed pedestrian-bicycle phase may be extremely complex. Due to limited time and space, only a few closely related factors are considered in this article, and the following assumptions are made for the mixed pedestrian-bicycle section to be partitioned.
Consistency of direction
Assuming that pedestrians and bicycles enter the mixed environment in the same direction, there is no retrograding, no traversing, and so on.
Weak denseness
It is assumed that the mixed pedestrian-bicycle section to be divided is neither overcrowded (participants would lose autonomy) nor too loose (there would be no interaction between participants).
Homogeneity
The influences of individual characteristics (gender, age, physical quality, cultural level, behavioral habits, mental state, acceleration ability, etc.) of target pedestrian and other participants on pedestrian movement intention are not considered excessively in this article. Bicycle with its cyclist is homogenized to an ellipse with the short half axis
Limited influence area
It is assumed that pedestrian movement intention is influenced only by the traffic participants in the interest zone (the area with greater influence on walking intentions and more pedestrian attention). Cases, where there are no traffic participants, multiple traffic participants, or a portion of the road edge in interest zone would be supplemented or simplified in accordance with specific rules.
To simplify the complex traffic phase in mixed pedestrian-bicycle sections, the interest zone of the target pedestrian needs to be partitioned and marked. Take that the target pedestrian is located in the middle of the mixed section as an example, and the interest zone of target pedestrian is partitioned as shown in Figure 1. This area is divided into six sub-areas including left-front, straight-front, right-front, left-rear, straight-rear, and right-rear according to the most front, left, right, and rear boundaries of the projection contour of walking target pedestrian. The following steps are carried out for obtaining the phase:
Step 1. Create a coordinate system with the center of target pedestrian as the origin. The walking direction is the longitudinal axis y, the horizontal axis x is perpendicular to the direction of walking, the coordinate of target pedestrian is marked as
Step 2. Judge whether there are traffic participants in each sub-area or not. There will be traffic participants in a sub-area when both horizontal and vertical coordinates of the participant meet the coordinate range conditions in the sub-area as shown in Table 1.
Step 3. Reduction and supplement of traffic participant.

Position relationship diagram for pedestrians and bicycles in the mixed section.
Coordinate range conditions for traffic participant in each sub-area.

Pedestrians tend to go to wider and more comfortable environment when they choose the field of next step. A traffic participant in the sub-area or a virtual traffic participant will be the participant representative of the sub-area for simplicity when there are traffic participants in a sub-area. It can be used to reflect the macroscopic traffic condition of the sub-area.
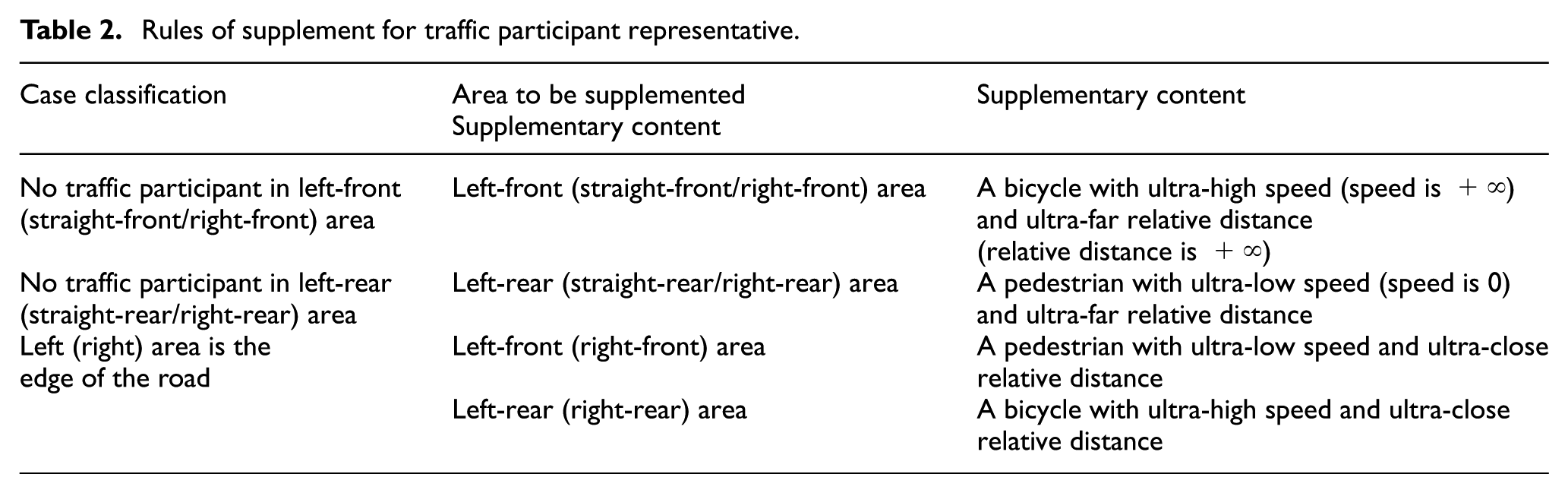
The traffic participant representative should be supplemented by certain rules when there is no traffic participant, or the one side of target pedestrian is the road edge in a sub-area. The rules of supplement are shown in Table 2.
Step 4. Mark state parameters of the target pedestrian and traffic participant representatives in six sub-areas.
Rules of supplement for traffic participant representative.
The serial number of the traffic participant representatives in each sub-area is marked as follows: the target pedestrian
Pedestrian movement intention analysis
The generation of pedestrian movement intention is a process of pursuing interests (such as security, efficiency, space, and comfort). The impact of the surrounding participants is smaller when the pedestrian walks in mixed traffic environment with low density. The pedestrian can freely walk to the destination according to his or her wish, and maintain a stable and comfortable speed and direction. There may be multiple movement participants around the pedestrian when traffic participant density in the mixed pedestrian-bicycle environment is large, and they will bypass or avoid to avert the collision with other traffic participants or pursue a wider field of vision and more free walking space. They generally will not change the direction when pedestrians are more satisfied with the current movement state, but they will have the intention of turning left or right when there is better walking space in the left or right direction. Pedestrians will bypass or avoid the left (or right) when pedestrians are not satisfied with the current state of movement (it can be divided into that the speed of the traffic participant in the front area is too low, limiting its normal speed of walking; or the speed of the traffic participant in the rear area is too high, bringing huge pressure on the speed for the pedestrian), and the left (or right) area has a better walking environment. The pedestrian can only keep the current direction of movement to follow or stop to wait when the walking environment of the right and left areas is no better than the current direction. The movement intentions of pedestrian can be divided into 10 types: stopping to wait (S), accelerating and turning left (AL), decelerating and turning left (DL), retaining speed and turning left (RL), accelerating and turning right (AR), decelerating and turning right (DR), retaining speed and turning right (RR), accelerating and following (AF), decelerating and following (DF), and retaining speed and following (RF) in mixed traffic sections.
Model framework
The form of fuzzy logic method is that carrying out approximate reasoning with the linguistic variable. It is appropriate for describing the subjective judgment process of the pedestrian movement. Thus, the fuzzy logic method is used in this article to build pedestrian movement intention identification model based on phase-field coupling theory.
For the convenience of the research, the incentive intensity acting on target pedestrian is used to describe the effect of field. Incentive intensity depends on the value evaluation of action results and the possibility estimation of achieving expectation. It can be used to comprehensively evaluate the satisfaction of walking safety, speed, and space for target pedestrian. On the one hand, the incentive intensity will increase along with the increase in walking safety sense. On the other hand, the incentive intensity will increase accompanying the comfort in speed. In addition, the incentive intensity will also increase with the increase in speed. Based on 10 movement intentions of pedestrians and the demand for walking speed and space, the indexes including safety, efficiency, and comfort are comprehensively considered in this article. The mixed pedestrian-bicycle phase field of target pedestrian is abstractly represented by a set of incentive intensity. The intention identification rule base is constructed to identify the pedestrian movement intention in mixed pedestrian-bicycle sections. The specific identification process is shown in Figure 2.
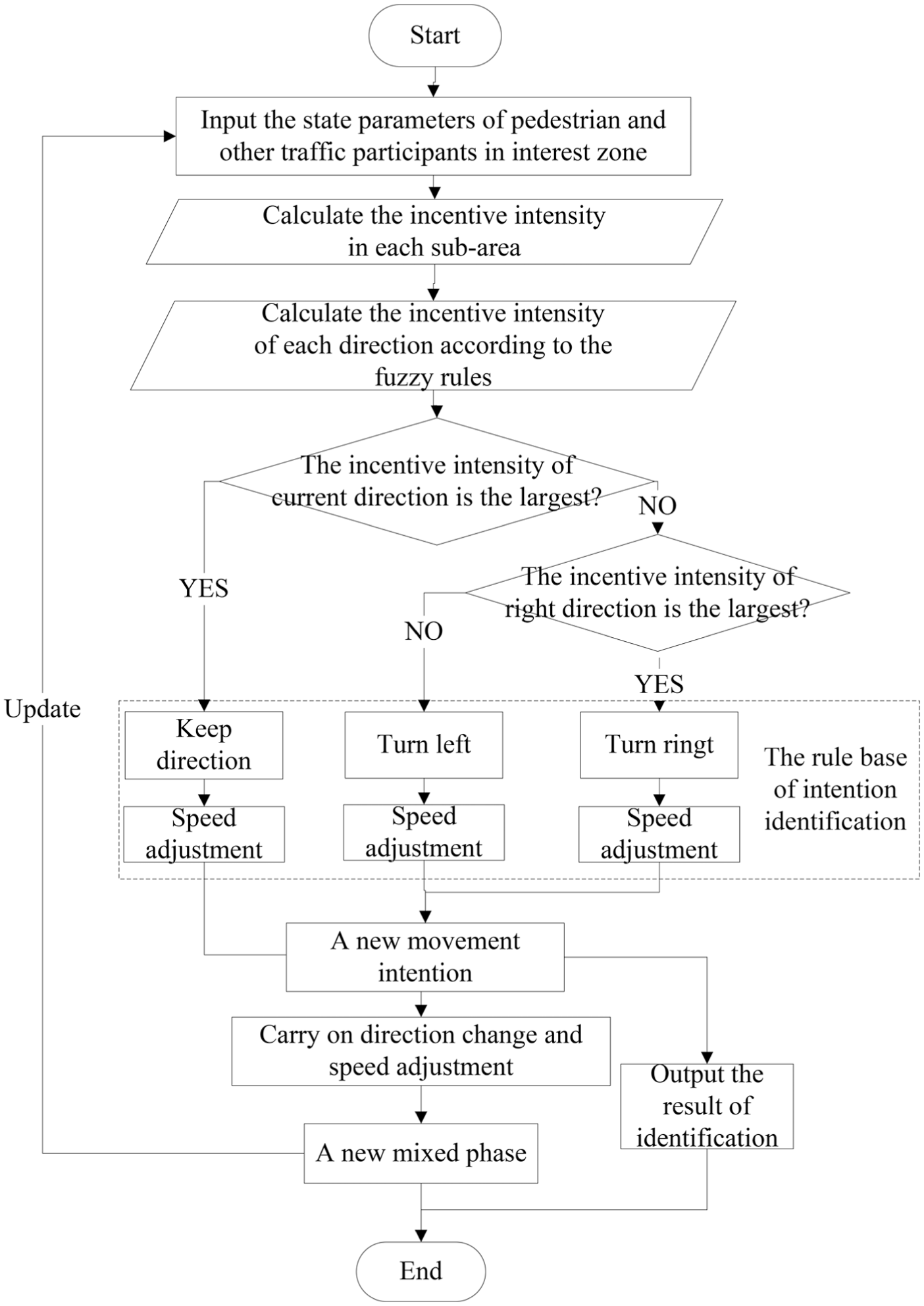
Flow chart of pedestrian intention identification.
Data collection
Participants
A total of 200 residents from Shandong Province, Zhangdian District, were selected as experimental participants, which include 120 men and 80 women, aged 21–54 years.
Experimental equipments
Limited to the availability of traffic participant movement data which is recorded on the smart devices, all kinds of traffic participant movement data in mixed pedestrian-bicycle sections were more intuitively captured from videos. The main equipment included high-definition video camera, tripod, plug-in multifunction navigation recorder, and notebook computer. And the participants’ trajectory data were collected through video camera.
Experimental condition
The experiment of data collection was carried out in good weather. The mixed pedestrian-bicycle section in Huaguang road (between north Xiwu road and Liuquan road in Zhangdian District of Zibo city) was elected as the experimental section, as shown in Figure 3. These sections serve for pedestrian and bicycle. There are many high buildings in the surrounding area, and it is convenient for setting up cameras. It must be ensured that there are no parking and interference of other obstacles in this section during experimental process for getting more accurate data. The early and late peak hours were selected as experimental periods for obtaining a variety of phases of the traffic data as much as possible.

Experimental route.
Experimental content
In order to ensure the effectiveness of experimental data and facilitate statistical analysis and processing, we limited the pedestrians and bicycles that enter into the experimental section. A number was set for each experimental participant, and the experimental participants were asked to pass the section with the specified direction and avoid retrograding, interruption, staying, and others as far as possible. High-definition video cameras were respectively arranged in the top view and side of the experimental section, and ensured they normally work during experimental process. The whole experimental process was shot by video camera without affecting experimental participants for collecting relevant data of pedestrians and their surrounding traffic participants in mixed sections as shown in Figure 4.

Screenshot of video.
Experimental data
The video tracking algorithm was used to collect and analyze the data of traffic participants in experimental area. The tab of data category can be collected as shown in Table 3.
Rules of supplement for traffic participant representative.

Results
The generation and development of human behavior are affected by certain objective environment. For the pedestrians, the external environment information obtained by the perception system is mainly the time-varying traffic environment information, including macroscopic traffic conditions of density, flow, velocity, blank connectivity, and the microscopic traffic conditions of the relative speed and relative distance of traffic entities. They are the external factors affecting the process of walking, they determine the pedestrian behavior as external conditions, and they also influence and determine the different needs of pedestrians. Pedestrians need to avoid other traffic participants and a variety of facilities on the road during walking, and these external factors directly affect the explicit behavior of pace, stride, stride frequency, and lateral oscillation. The current speed, the relative distance, and the relative speed were objective factors, and these factors were easy to be felt and obtained.
Fuzzy variables and corresponding fuzzy sets
Current speed state
Its fuzzy set is {slow, medium, fast}, and the membership is shown in Figure 5, where,

Membership function of current speed.
Relative distance

Membership function of relative distance.
The threshold

where
Threshold

where
Threshold

where
The threshold of the relative distance from “middle” to the relative distance “far” is given by the following formula

where
Relative speed

Membership function of relative speed.
The relative speed of “large negative” is the velocity difference of target pedestrian and the rear traffic participant. In the reaction time, it can make the reduced distance equal to the difference of the relative distance from “middle” to “near.” That is to say

The relative speed of “small negative” is the velocity difference of target pedestrian and the rear traffic participant. In the reaction time, it can make the reduced distance equal to the difference of the relative distance from “far” to “near.” That is to say

where
Pedestrian movement intention identification rule base based on fuzzy logic
The effect of traffic participants in six sub-areas which can make target pedestrian switch to this direction is abstracted as incentive intensity. If the target pedestrian selects one direction where this area plays a positive effect (attraction or induction), the incentive intensity will be “strong” and high, and if it has negative effect (exclusion or obstruction), the incentive intensity will be “weak” and low. The incentive intensity is expressed by a score: “very weak” is −5, “very strong” is 5, and the score of different intensity is expressed in the interval [−5, 5]. The corresponding score of different incentive intensity is shown in Table 4.
Corresponding score of different incentive intensity.

Based on comprehensive analysis of a large number of experimental data, simulating and debugging are repeated in this article. Considering the current speed state of target pedestrian, the type of the traffic participants, relative distance, and relative speed in each sub-area, the fuzzy logic method is used to reasonably score the incentive intensity. A typical linguistic fuzzy rule is as follows: if the speed state of the target pedestrian is “low,” the relative distance between the front-left bicycle and the target pedestrian is “far,” relative speed is “large positive,” and the score of the front-left area will be 5. Due to limited space, other inference rules are not detailed here.
The incentive intensity score of other sub-areas for target pedestrian can also be obtained in a similar method. The implementation strength of pedestrian change to this direction the participant in can be obtained according to the score of its incentive intensity. Take the left area as an example; its fuzzy inference rule is shown in Table 5.
Fuzzy inference rules of incentive intensity in left area.

The arrangement of incentive intensity is as follows: very strong > strong > general > weak > very weak.
Incentive intensity of the current area and the right area can be obtained in a similar method. The instantaneous phase of mixed pedestrian-bicycle traffic can be expressed according to the incentive intensity in three different areas of interest zone, thus the phase of interest zone can be reduced to 13 types. The choice of direction and speed can be obtained according to the phase type, the current speed state of target pedestrian, and the incentive intensity of current direction. That is to say, the pedestrian movement intention in this phase type can be obtained. Several rules of intention identification are obtained through comprehensive analysis of a large number of experimental data and repeated simulation debugging. The rule base of identification is shown in Table 6. Take the identification under the 12th phase (the part of italic and oblique as shown in the table) as example; when the phase type is “left > right > current,” the current speed state of target pedestrian is “fast” and the incentive intensity of current direction is “normal”: it can be inferred that the intention is “decelerating and turning left (DL).” According to the identification rules shown in the table, the pedestrian movement intention can be identified according to the instantaneous state of pedestrian in mixed pedestrian-bicycle sections and the surrounding phase.
Rule base of intention identification.

“–” means there is no this kind of situation.
Model calibration
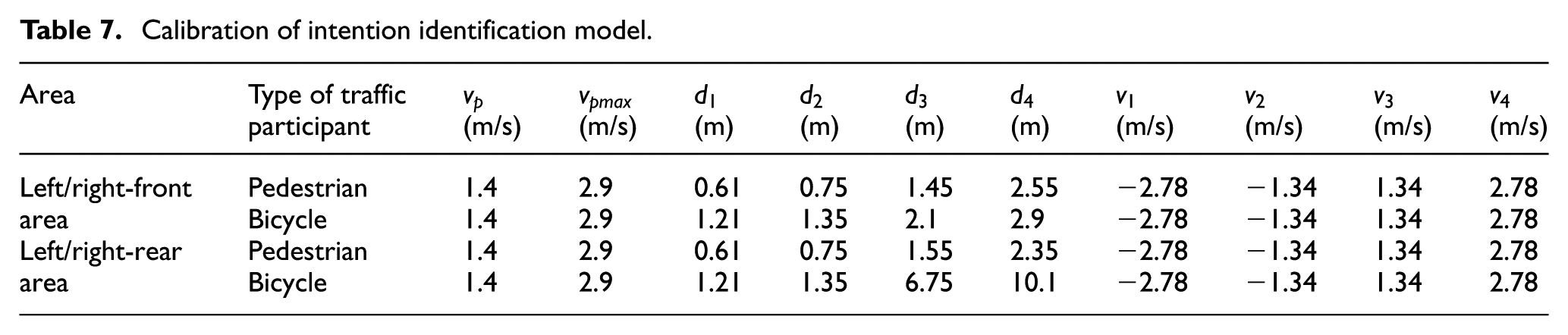
A large number of experimental data were analyzed and processed according to previous experience. A part of the parameters of the model was calibrated as shown in Table 7.
Calibration of intention identification model.
Discussion
Model validation
In order to verify the reliability of pedestrian movement intention identification model, the experimental data which are not used for calibrating the model was used to validate the model. And the comparison of the experimental data and the simulation result was used to judge whether the model could objectively reflect the actual traffic situation of the mixed section.
Verification of the pedestrian movement intention identification model based on observation experiment
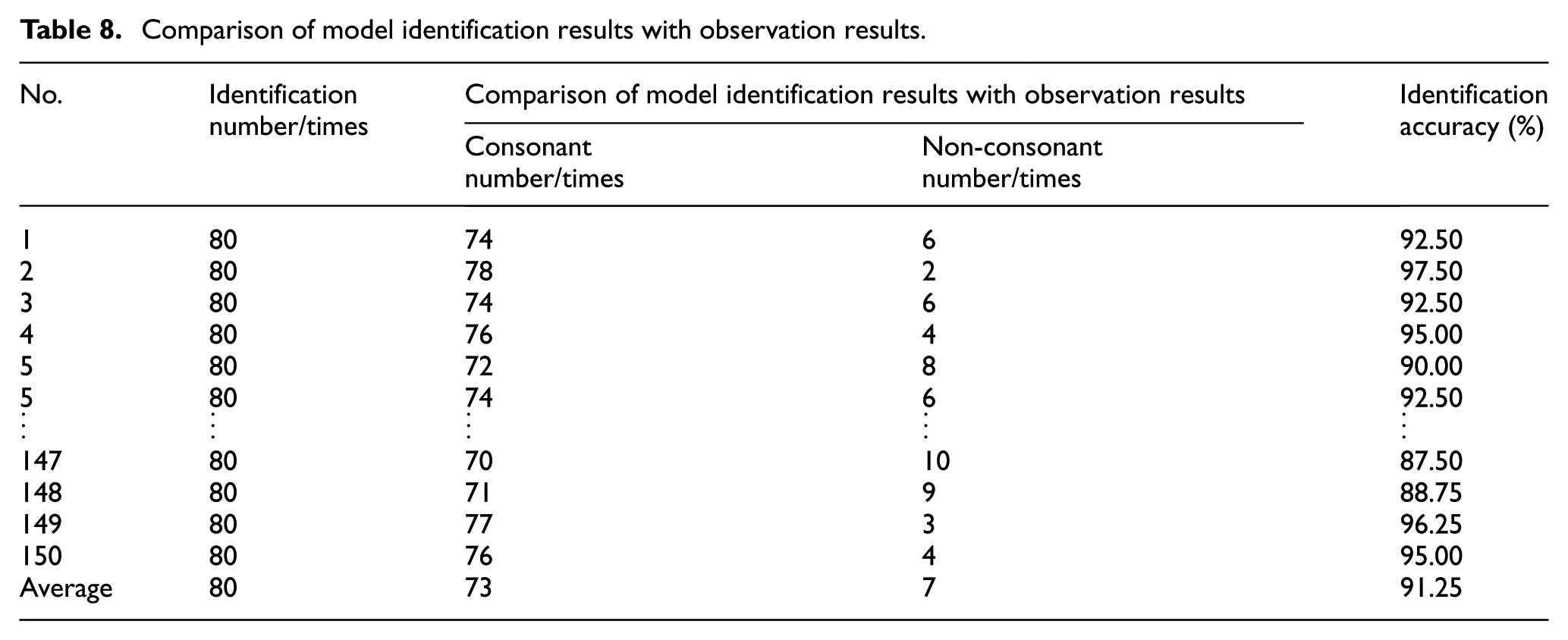
A part of experimental data (not used for calibrating the model) was used to validate the model. The movement data of 150 pedestrians were selected in this article, and 80 times intention identification for each target pedestrian was made according to the measured experimental data and compared with the actual behaviors of the target pedestrian for confirming the validity and reliability of the identification model. On the basis of these works, the model parameters were modified for perfecting the final movement intention identification model in the mixed pedestrian-bicycle section based on the phase-field theory. As can be seen from Table 8, the accuracy of identification is beyond 90%. The results showed that the identification results fit well with the observed results, and the identification model is reasonable and effective.
Comparison of model identification results with observation results.
Verification of pedestrian movement intention identification model based on microscopic simulation
The simulation environment same as observation experiment was constructed for each target pedestrian, and the target pedestrian movement process was restored according to the identification results. The simulated data were compared with the measured data. Due to limited space, only the target pedestrians’ data are shown in Table 9, and Figures 8 and 9.
Comparison of simulated data and measured data of target pedestrian.


Comparison of forecasting tracing points and real tracing points of target pedestrian.

Comparison of forecasting speed and real speed of target pedestrian.
As can be seen from Table 8, the measured data and simulated data about the average speed and walking distance of target pedestrian are similar in the simulation period which can verify the validity of the model. From Figures 8 and 9, the forecasting tracing points obtained from simulation model are basically the same as the real tracing points and the forecasting speed is highly consistent with the measured speed. It can be proved that the pedestrian movement intention identification model in the mixed pedestrian-bicycle section established in this article has a high accuracy.
Comments
The observation and simulation experiments demonstrated that the proposed model can effectively identify the pedestrian movement intention in the mixed traffic environment:
This model combined the advantages of cellular model and mechanics model. The relative velocity and relative distance were translated into incentive intensity using fuzzy inference rules, and pedestrian-bicycle traffic phase field was labeled by the incentive intensity of each sub-area in this article. Complex issues were analyzed through simple rules for improving the operation efficiency and ensuring the accuracy of forecasting results.
The property of dynamic grid was attached to target pedestrian, and the surrounding traffic participants were assigned to different sub-areas. The traffic participants in different sub-areas were supplemented or reduced according to the rules. And the interactive effects of traffic participants in each sub-area with target pedestrian were respectively discussed to simplify the complex pedestrian-bicycle traffic environment where the target pedestrian was.
The movement parameters of traffic participants were collected from videos. The non-invasive experimental method can ensure the authenticity and validity of experimental data as far as possible.
Although the model is reasonable and effective, there still exist some shortcomings:
The phase of pedestrian and bicycle is extremely complex. Several assumptions were made for improving the efficiency and reducing the complexity. These assumptions need to be reduced in the follow-up study for considering more cases and improving the coincidence degree between the model and the actual situation.
The pedestrian movement intention was also affected by gender, age, physical quality, mental state, and other individual characteristics of target pedestrian and other participants. The types of pedestrians and cyclists should be considered for establishing a more comprehensive and systematic knowledge base of intention identification, thus the pedestrian movement intention could be identified more accurately.
Limited to the ability of experimenter, equipment accuracy, and other objective conditions, there may be some errors in the experimental data causing the deviation of the identification results. Data collection technology needs to be attached with great importance for improving the accuracy and availability of data.
Conclusion
Aiming at the real-time changed space–time relationship and the traffic characteristics of target pedestrian in mixed pedestrian and bicycle environments, the influence of the mixed phase field on direction choice and speed adjustment was synthetically considered in this article. Fuzzy logic method was used to construct the movement intention identification model which can comprehensively consider pedestrian walking safety feeling, speed, and space requirement. The results of observation and simulation experiment verified that the identification results of this model were consistent with the actual situation, thus the effectiveness of this model was certified. This model can provide a theoretical basis for the further study of pedestrian behavior in mixed pedestrian and bicycle sections, and provide basic support for researching pedestrian safety warning system.
In this article, the pedestrian movement intention was analyzed and modeled in the simplified mixed pedestrian and bicycle environment. More complex traffic environment should also be extended in future study, and more factors should be considered to build more effective identification models for promoting the development of the pedestrian and bicycle safety warning system.
Footnotes
Handling Editor: Gang Chen
Author note
Zhen-xue Liu is now affiliated to College of Electromechanical Engineering, Qingdao University of Science & Technology, Qingdao, China.
Xiao-yuan Wang is also affiliated to College of Electromechanical Engineering, Qingdao University of Science & Technology, Qingdao, China.
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by the State Key Laboratory of Automotive Safety and Energy under Project (grant no. KF16232), the National Natural Science Foundation of China (grant nos 61074140, 61573009, 51508315, and 51608313), the Natural Science Foundation of Shandong Province (grant no. ZR2014FM027), the Social Science Planning Project of Shandong Province (grant no. 14CGLJ27), and the Project of Shandong Province Higher Educational Science and Technology Program (grant no. J15LB07).