
Abstract
Hydraulic system smoothness is critical to product quality and position tracking. However, the nonlinear friction is an important factor causing unstable phenomenon of the hydraulic system when at low speed. Relevant research shows that the identified nonlinear friction has a large error with the actual friction force, which will bring a great challenge to design the friction compensation controller. Considering the difficulty of the friction model and identification, this article presents a new approach of friction model and identification for hydraulic system based on multi-agent particle swarm optimization–Nelder–Mead downhill simplex algorithm optimization Elman neural network. First, the nonlinear friction was established using the Elman neural network model. Then, a multi-agent particle swarm optimization–Nelder–Mead downhill simplex algorithm was proposed to search the nonlinear parameters of the Elman neural network model. Subsequently, the proposed algorithm was validated by complex nonlinear functions. Finally, the effectiveness of the Elman neural network model was demonstrated by the results from experiment. And comparison with the conventional LuGre friction model, the results show that the Elman neural network model predicts friction more accurately. This study provides the bases for designing the friction compensation controller.
Keywords
Introduction
Hydraulic systems are used in a wide variety of industrial applications, such as national defense, metallurgical industry, and servo control machinery, with the advantages of high force-to-mass ratio, ability of precise position control, and large processing force they can apply with rapid responses.1–3 However, the strong nonlinear friction of hydraulic system can severely deteriorate the position tracking performance in the form of higher tracking errors, oscillating and crawling phenomena, especially in ultra-low-speed conditions.4,5 For example, the final quality of titanium/aluminum alloy forgings is closely related to the stability of forging hydraulic machine at low speed. Relevant research shows that the nonlinear friction between the piston and the piston cylinder seal is an important factor causing unstable phenomenon of the hydraulic system when at low speed. Thus, it is highly necessary to eliminate the influence of friction for hydraulic system.
In order to predict the behaviors of a hydraulic cylinder system, it is essential to find an accurate mathematical model that can capture the nonlinear friction behaviors. At present, many characteristics of friction have been observed, including the Stribeck effect, presliding displacement, stick-slip motion, and frictional lag.6–8 Many friction models have been proposed to describe the friction behaviors, and a brief review is hereby provided. The Dahl model shows that the friction force is position dependent and makes possible to use the theory of hysteresis operators. 9 Later, the Dahl equation was developed into a dynamic state equation by Canudas et al., which was known as the LuGre model. This model has been developed into many forms and one of its modified forms is used in direct-drive mechatronics systems. 10 However, the basic LuGre model cannot predict the dynamic friction accurately in the sliding regime of a hydraulic cylinder when the system operates under oscillating velocity conditions. 11 In addition to the above two famous models, the generalized Maxwell-slip (GMS) model was developed to predict the friction behavior in presliding regime for control purposes. 12 Over the past few years, due to the ability to approximate arbitrary nonlinear systems, neural network has been widely explored and attempted to model the nonlinear friction. A comprehensive literature review on this subject can be found in Bai and Pu 13 The Elman neural network (ENN), 14 which possesses dynamic characteristics, is employed to model the nonlinear friction of hydraulic cylinder in this work.
Identification of the frictional model parameters is another challenging issue while implementing the model. Several effective identification approaches have been proposed and successfully applied. A linearized recursive least squares method was proposed in Choi et al. 15 to identify the tire–road friction coefficient. Ruben Garrido and Antonio Concha utilized an algebraic recursive method to identify the servo mechanisms. 16 Besides, over the past dozen years, heuristic algorithms have been extensively developed to solve complicated optimization problems. The most commonly used heuristic algorithms, namely, genetic algorithms (GA), 17 particle swarm optimization (PSO), 18 and simulated annealing algorithm, 19 have been proved to be a significant contribution both in scientific and engineering applications. However, those methods present slow convergence while searching high-dimensional parameters. In this article, a two-phase hybrid optimization scheme is proposed to identify the friction parameters.
In this article, a new approach of friction model and identification for hydraulic system based on multi-agent particle swarm optimization (MAPSO)–Nelder–Mead downhill simplex (NMDS) optimization ENN model was presented. First, the ENN model was used to establish the nonlinear friction of hydraulic system. Then, MAPSO-NMDS algorithm optimization scheme was proposed to estimate the ENN model parameters, and the proposed algorithm was validated by complex nonlinear functions. Finally, the ENN model was assessed via signals obtained from the hydraulic test platform. The parameters of the LuGre friction model were identified using MAPSO-NMDS algorithm, and compared with the ENN model, the results show that the ENN model predicts frictional force more accurately. This work provides the bases of designing a friction compensation controller.
The rest of this article is organized as follows. Section “ENN friction model” gives a detailed description of ENN friction model. Then, the MAPSO-NMDS optimization procedure was presented in section “Identification procedure,” and friction modeling and identification of hydraulic system based on MAPSO-NMDS optimized the ENN, which was established in section “Friction model and identification of hydraulic system based on MAPSO-NMDS optimization ENN.” The results were given in section “Results and discussion.” Finally, the conclusion of this article was summarized in section “Conclusion.”
ENN friction model
The ENN is one kind of globally feedforward and locally recurrent network model. 14 The structure of the ENN model is shown in Figure 1. It mainly consists of four layers, including input layer, hidden layer, context layer, and output layer. There are adjustable weight coefficients connecting each two adjacent layers. Compared with the static neural network, such as backpropagation (BP) neural network and radial basis function neural network, the ENN model adds context nodes and local recurrent connections between the context layer and the hidden layer. And the connections between the context layer and the hidden layer are fixed. Furthermore, since dynamic characteristics of Elman network is provided by internal connections, it does not need to use the state as input or training signals, which makes ENN superior to static feedforward network and is widely used in dynamic system identification. The distinct ‘local connections’ of context nodes in the ENN make its output sensitive not only to the current input data but also to historical input data, which is useful in time series prediction. It has ability to adapt to time-varying characteristics, so it is very suitable to identify the nonlinear friction force of the hydraulic system.
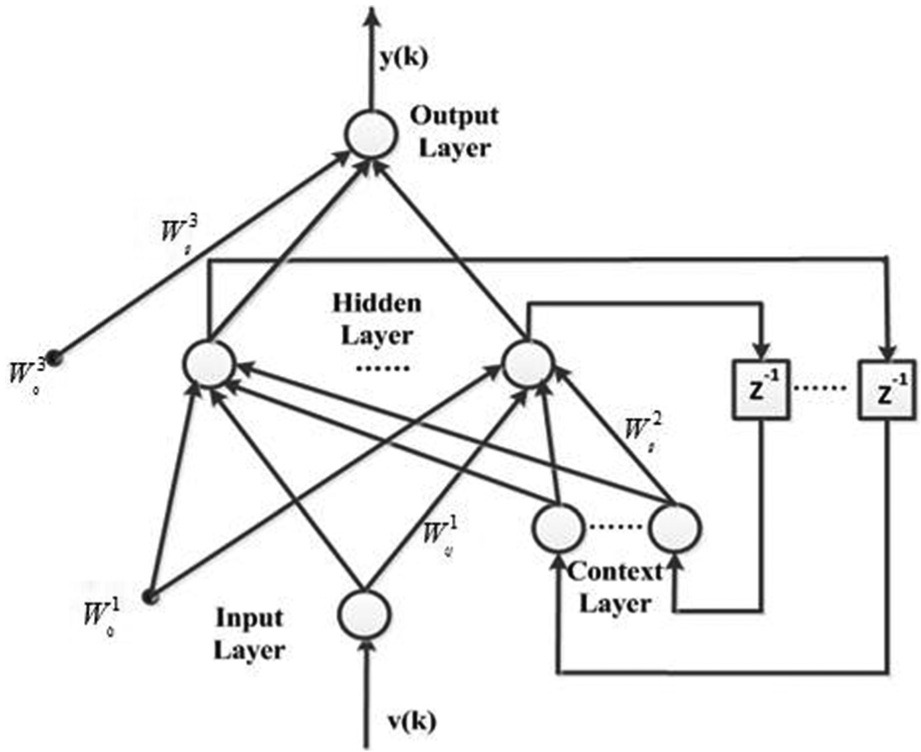
Structure of the ENN.
The ENN model is trained to generate the special output signal when driven by the corresponding input signal. The training algorithm for the ENN is similar to the BP learning algorithm, as both based on the gradient descent principle. However, the role that the context weights as well as initial context node outputs play in the error BP procedure must be taken into consideration in the derivation of this learning algorithm. At iteration

where

The output of the hidden nodes can be described by

where

We emphasize that the output of context node

Suppose

where

At the kth iteration, we get

and

where

where

Due to its dynamical properties, the ENN has found numerous applications in areas such as time series prediction, system identification, and adaptive control. Furthermore, it is well suited for dealing with the intrinsic nonlinearity in time series data.
Identification procedure
MAPSO
Multi-agent system (MAS) which is summarized in Stone and Veloso
21
describes a new concept in the field of artificial intelligence. The agents in MAS try to achieve objectives through neighborhood competition, cooperation, and self-learning. Set a load group states
In MAPSO, every agent is regarded as a particle with cognitive ability and the fitness value is used to describe its objective

where
Global and local environment. A square grid (Figure 2) is established to show the global environment where agents live. Each lattice point denotes an agent, and the neighbors of a particular agent refer to its nearest four agents. It is worth noting that the first row of the square grid is supposed to connect with the last row, so as the first column and the last column.
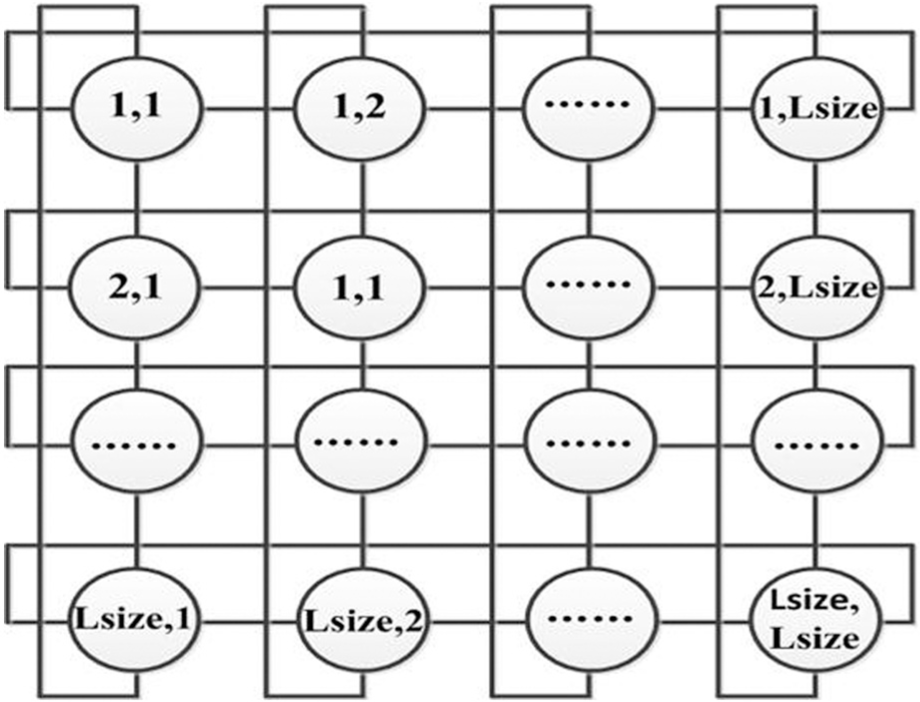
Multi-agent grid.
The rules that agents abide: In MAPSO, three operators are designed to speed up the evolution of agents to find the global optimal solution, including neighborhood competition operator, PSO operator, and self-learning operator. In the following of this article,
Neighborhood competition operator: Supposed that the neighborhood competition operator is executed on the agent
In strategy 1, it focuses on the usage of pre-existing information. The elements of

In strategy 2, it focuses on the exploration of new information. First, an intermediate agent

Then, agent

where

2. PSO operator: In this step, evolutionary mechanism of PSO is adopted to update speed and position of agents. The velocity and position of each agent are calculated by the following formulas


where



where G denotes the total generation, i represents the current generation,
3. Self-learning operator: In this operator, a self-learning mechanism is designed to improve the precision of solution. A small-scale MAPSO, constructed based upon the current global optimal agent (gBest) information, is used to perform the self-learning operator. First, a small square grid (sL), whose size is sLize × sLize, is established based on the following formula

where

where sR ∈ [0, 1] denotes search radius.
Then, neighborhood competition operator together with PSO operator is applied on sL. Finally, gBest will be updated by the best agent with smallest fitness value if it fails in the above process.
A mean square error (MSE) is used to evaluate the effectiveness of the MAPSO-based two-stage optimization scheme

where
MAPSO–NMDS optimization scheme
In this article, minimization of the cost function J (equation (5)) directly will be confronted with great difficulties. On one hand, there is big difference in the range of parameters. For example, the weight matrix
To circumvent these two problems, NMDS
22
algorithm is implemented. NMDS is a single-objective optimization approach for searching the space of n-dimensional real vectors. It constructs

These vectors form
According to the above description, a MAPSO-NMDS optimization scheme is formulated to search the nonlinear parameters of the ENN model

where
MAPSO-NMDS algorithm validation
In this article, five kinds of functions are selected as the test, aiming to verify the effectiveness of MAPSO-NMDS algorithm for searching global optimal values of complex nonlinear functions, and compared with the PSO algorithm.
Griewank function

Ackley function

Sphere function

Schwefel function

Rosenbrock function

In the above five kinds of complex test function, the global minimum of the Rosenbrock function is located at (1, 1, …, 1). The global minimum of the other four functions are located at (0, 0, …, 0), and the minimum of the five functions is 0. The MAPSO-NMDS and PSO algorithm optimization test functions are shown in Table 1.
Comparison of two algorithms to optimize the results.

As can be seen from Table 1, MAPSO-NMDS algorithm is more accurate than PSO algorithm in the search function minimum. And the adaptive function mean and variance are mostly equal to zero by MAPSO-NMDS algorithm. However, the MAPSO-NMDS algorithm takes longer time than that of PSO algorithm. This is mainly due to the high frequency of the target function.
Through the above analysis, it is verified that the proposed MAPSO-NMDS algorithm is more accurate in the optimization of complex nonlinear problems.
Friction model and identification of hydraulic system based on MAPSO-NMDS optimization ENN
Friction identification strategy of hydraulic system using MAPSO-NMDS Optimization ENN
Die-forging press (DFP) has become one of the key equipments of solving complex and difficult machining aerospace forging integrally formed. The schematic diagram of the DFP is shown in Figure 3. It mainly consists of hydraulic system, driving hydraulic cylinder, activity plate, and return hydraulic cylinder. The activity plate is fixedly connected to the drive cylinder, and the reciprocating motion of the hydraulic cylinder is driven by the hydraulic system.
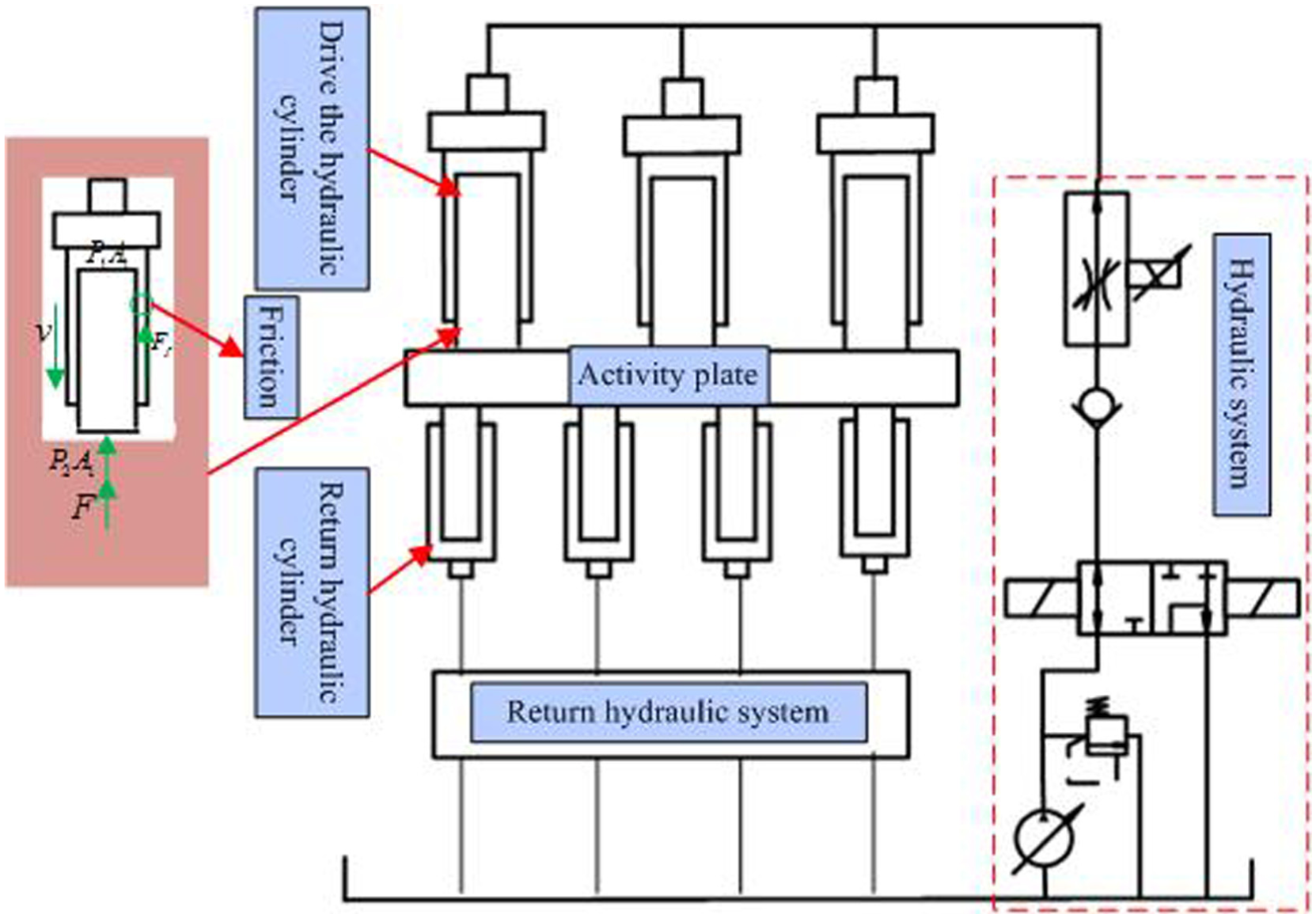
Schematic diagram of the die-forging press.
DFP smoothness is critical to product quality and position tracking. However, the nonlinear friction between the piston and the piston cylinder seal is an important factor causing unstable phenomenon of the hydraulic system when at low speed. To accurately design the friction compensation controller, we present and discuss a dynamic identifier to perform the friction identification of nonlinear systems using MAPSO-NMDS optimization ENN. The block diagram of the identification model of the friction is shown in Figure 4.
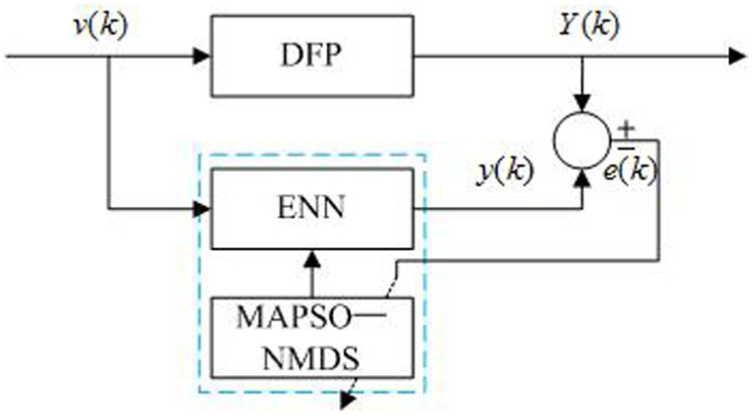
Block diagram of the identification model of the friction.
In the friction identification model, the piston velocity is the input of the ENN model, and the output is the friction. The fitness of each agent is evaluated by formula (6).
Optimization of ENN friction model with MAPSO-NMDS
Friction model and identification of hydraulic system based on MAPSO-NMDS optimization ENN flowchart are shown in Figure 5. First, the friction force was calculated according to the velocity of the system test. Then, the global optimal value of ENN friction model was searched using the MAPSO algorithm. Subsequently, NMDS algorithm will supersede the MAPSO algorithm to search for a more accurate weight of the ENN model. Finally, the optimal ENN model was used to identify the friction force of hydraulic system. The friction identification model steps were as follows:
Step 1. Input the system data, initialize ENN model weights, and specify the lower and upper boundaries of the solution variable.
Step 2. Build agent environment and initialize each agent.
Step 3. Evaluate the fitness value of each agent using equation (11).
Step 4. Perform the neighborhood competition and cooperation operator on each agent using equation (12).
Step 5. Execute the PSO and Self-learning operator in the search space at each agent according to equations (16), (17), (21), and (22).
Step 6. Evaluate the fitness value of each agent using equation (7) and determine the best agent with the minimum fitness value.
Step 7. If one of the stopping criteria is satisfied, then go to next step. Otherwise, go to step 3.
Step 8. NMDS algorithm will supersede the MAPSO algorithm to search for a more accurate weights.
Step 9. The optimal weights were substituted into ENN model and sample training was performed. If one of the stopping criteria is satisfied, then go to next step. Otherwise, go to the previous step.
Step 10. The optimal ENN model is used to identify the friction force of hydraulic system.

Friction model and identification of hydraulic system based on MAPSO-NMDS optimization ENN flowchart.
The code for the ENN model and the MAPSO-NMDS algorithm is written using MATLAB version 10.0. According to the flowchart of Figure 5, the implementation process of this code is listed in Table 2.
The implementation process based on MAPSO-NMDS optimization ENN model.

Results and discussion
Experimental test description
According to the principle of DFP, a low-speed hydraulic cylinder experimental platform is designed. The experimental platform hardware part have 16-channel analog input and 24-channel digital acquisition card, which is used to acquisite the piston displacement and the relay input/output digital signal to control the valve. And analog signals output into the control proportional valve using 8 channels and 16-bit peripheral component interconnect (PCI) card. The software part uses LabVIEW to process and store signals. The test and control system principles are shown in Figure 6.

Block diagram of the test and control systems.
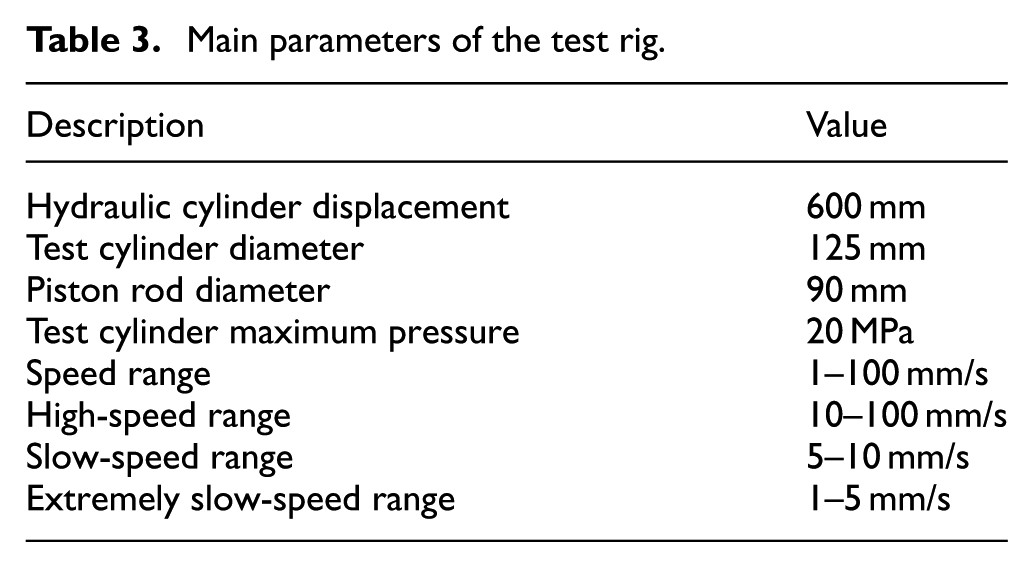
The experimental data for system identification were obtained from the hydraulic cylinder test platform shown in Figure 7 and its hydraulic system schematic diagram shown in Figure 8. Two pressure sensors were used to measure the pressures of the test cylinder. The displacement x of the piston rod was measured by a displacement sensor mounted on the piston. The velocity and acceleration were obtained by differentiating displacement. A force sensor was assembled in piston rod to measure the supporting force. The voltage signal was issued by an industrial personal computer (IPC) and controls the proportional valve. Then, the fluid, which was controlled by the proportional valve, pushes the piston rod to move. Signals from the displacement sensor, pressure sensors, and force sensor are read into computer and utilized to estimate the nonlinear friction. The main parameters of the test stand are shown in Table 3.

Experiment platform: (a) hydraulic cylinder test stand and (b) test system.

Hydraulic system schematic diagram of experiment platform.
Main parameters of the test rig.
After the experimental data being acquired, the nonlinear friction force

where m is the mass of the piston rod;
Identification results
In all, 2000 points of experimental data, with sampling frequency of 128 Hz, were made available and all of the data were processed by a Butterworth filter with cutoff frequency at 5 Hz. Then, the first 1600 sample-long points were exclusively used to estimate the ENN model’s parameters. Another 400 sample-long points were used to model validation. This percentage was held at the same level in this article. The velocity data set used for identification and validation is shown in Figure 9.The friction force is calculated according to formula (31), and the calculated values are shown in Figure 10.
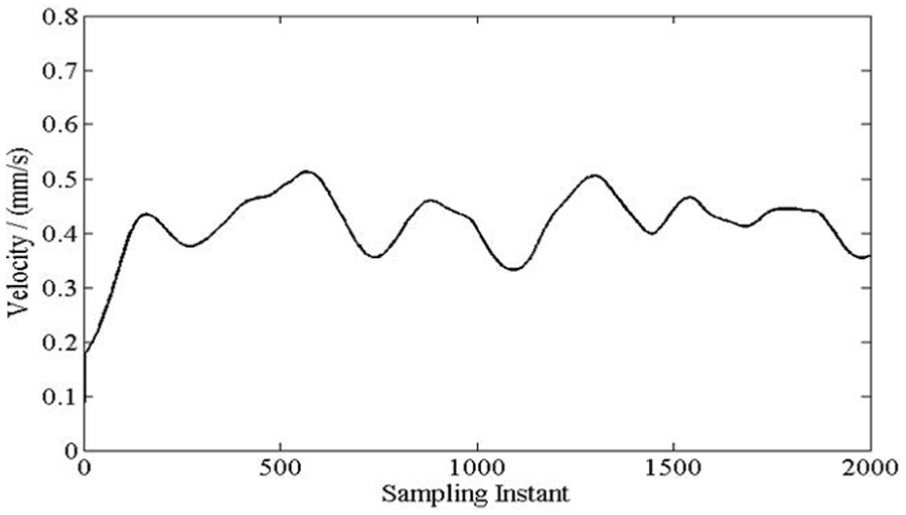
Dataset of velocity.
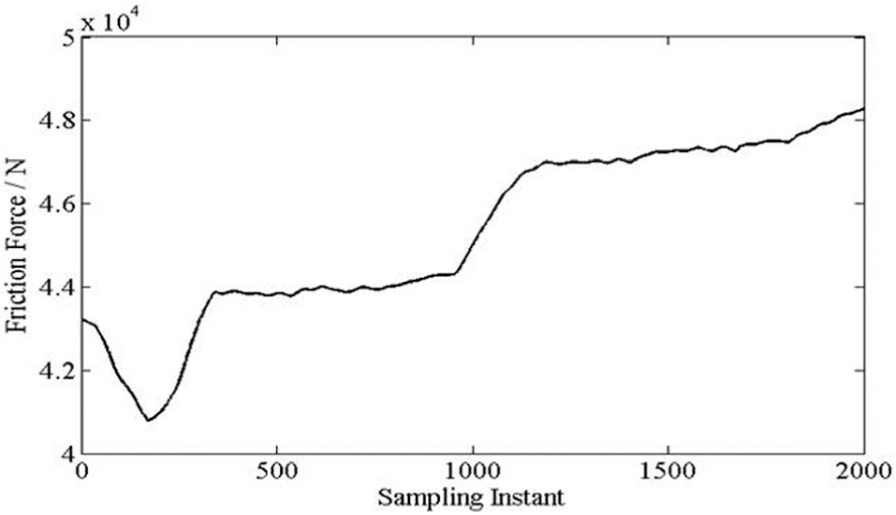
Calculation of the friction force.
In the process of identification, the number of neurons was chosen through the trial and error method until the cost function no longer dramatically decreased. A comparison was made among the ENN models with 20, 30, and 40 neurons to find a relatively better model. The values of the internal connections

Identification results with 20, 30, and 40 neurons based on ENN model: (a) N = 20, (b) N = 30, and (c) N = 40.
When there is 20, 30, and 40 neurons in the ENN model, the MSE values are 0.3277%, 0.2632%, and 0.2377%, respectively. It is confirmed that the ENN model can perfectly predict the strongly nonlinear friction since all the MSE values are less than 1%. But there need to make a good trade-off between the MSE and the simplification of the model. If the neurons increase, the price paid for searching the best parameters will be high. Thus, the final ENN was consisted of 30 neurons with 180 internal connections after weighing the costs against benefits.
Comparison with LuGre model
This study show that the LuGre model is widely used to identify friction force. The LuGre model is given by


where

where
In order to verify the ENN model to predict the accuracy of friction, the proposed MAPSO-NMDS optimization scheme was used to search the optimal value of LuGre friction model, where
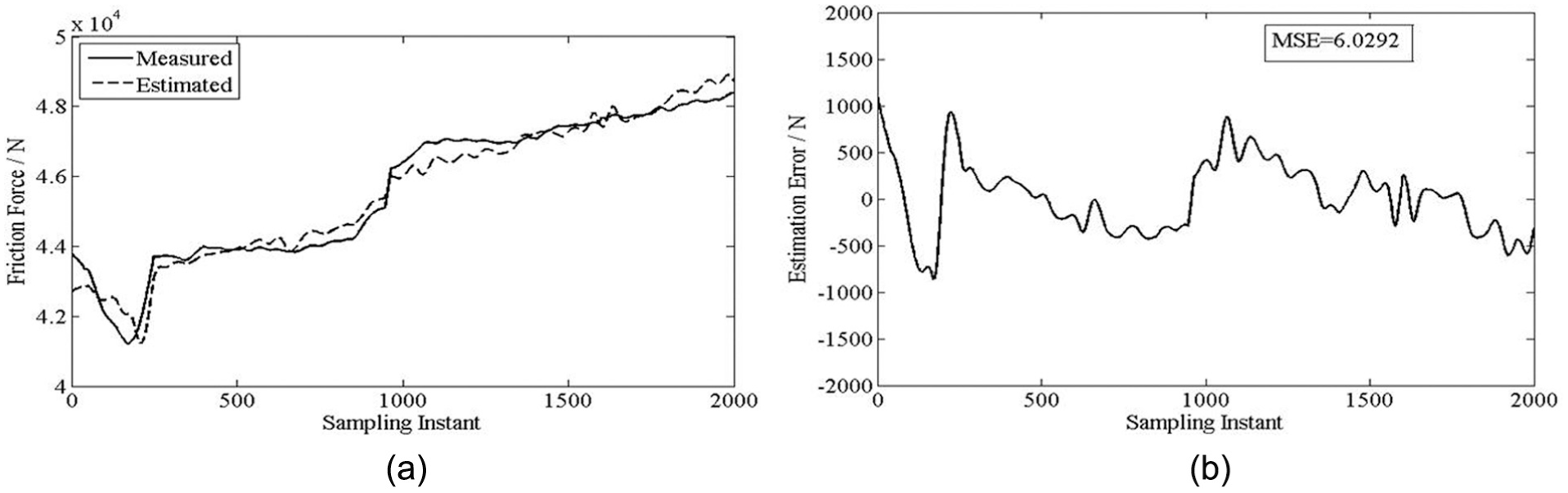
Identification result based on LuGre model: (a) measured and estimated compared and (b) LG model identification error.
From the identification friction error curves in Figures 11(b) and 12(b), it can be seen that the ENN model predicts that the friction error is smaller than that of the LuGre model. In order to compare the two models to predict frictional ability more specifically, the MSE, MAX, and parametric complexity (number of model parameters) values were provided. The performance is presented in Table 4.
Comparison of ENN and LuGre models.

As can be seen from Table 4, the ENN model achieves an MSE value which is 95.6% less than that of the LuGre model. And comparing the MAX values predicted by the two models, the MAX value of the ENN model is smaller. The MSE value of LuGre model is more than 5.0%, and it means that the LuGre model cannot predict the friction of hydraulic cylinder well, whereas the ENN model brings a significant performance.
From the above analysis, it is concluded that the ENN model predicts the friction of hydraulic cylinder more accurately. However, the price paid for this benefit is that more parameters need to be identified. Anyhow, this may not be necessarily a concern since parts of the coefficients are set to zero and the proposed optimization scheme possesses the characteristic of rapid convergence.
Conclusion
The nonlinear friction force is an important factor causing unstable phenomenon of the hydraulic system when at low speed. However, relevant research shows that the identified nonlinear friction has a large error with the actual friction force, which will bring a great challenge to design the friction compensation controller.
In this study, a new approach of friction model and identification for hydraulic system based on MAPSO-NMDS algorithm optimization ENN was presented. The main contributions of this article can be summarized as follows.
As the ENN model has the ability to adapt to time-varying characteristics, it was developed to model the nonlinear friction. A global optimization phase utilizing MAPSO algorithm and a fine optimization phase using NMDS algorithm to search the nonlinear parameters of the ENN model were presented. The proposed model enhances the global search accuracy. And the MAPSO-NMDS algorithm was validated by searching the high-dimensional parameters in the global scope. Then, the friction model and identification based on MAPSO-NMDS optimization ENN was established.
The proposed ENN model was demonstrated by the results from experiment. And compared with the conventional LuGre friction model, the results show that the ENN model predicts friction force more accurately. This study provides the bases for designing the friction compensation controller.
Footnotes
Acknowledgements
This study was partially supported by the National “Twelfth Five-Year” Plan for Science and Technology of China (No. 2015BAF07B03), the Project of Innovation-driven Plan in Central South University (2015CX002), Innovation project of Central South University Graduate Student (2016zzts042), and Project of Hunan Science and Technology (2014RS4056).
Handling Editor: Jose Antonio Tenreiro Machado
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) received no financial support for the research, authorship, and/or publication of this article.