
Abstract
The pump-displacement-controlled actuator offers a very promising alternative and energy-saving solution for many applications in construction machines. It has proven to be with high fuel economy by eliminating the metering losses associated with hydraulic valves. However, actuator oscillation is observed while working with fluctuated velocity or dynamic loads due to slow dynamic response and low tracking accuracy of the pump-controlled actuator. To improve control quality, a new proportional-integral algorithm combined with feed-forward compensation is put forward in this article. Based on the analysis of the swash plate adjustment mechanism, the state-space equation is established. And then, simulation and experimental studies were carried out. Both simulation and experimental results show that the new controller based on proportional-integral algorithm with feed-forward compensation achieves higher dynamic response and tracking accuracy than the conventional proportional-integral controller. And the actuator oscillation is eliminated.
Keywords
Introduction
Hydraulic drives are used in many industrial and mobile applications where high power density and dynamic performances are required. Taking construction machinery as example, valve-controlled hydraulic system is a widely used power driving scheme. However, the conventional valve control system is inefficient and a varieties of energy-saving methods emerged, such as electric hybrid,1,2 hydraulic hybrid,3,4 and power matching strategy. 5 Researchers have confirmed that over 35% of the overall energy output from the engine principle axis was consumed by the metering valves. 6 This fact is becoming distressing due to rising fuel prices and stringent emission requirements.7,8 Recently, a pump-controlled system with closed circuit derives a lot of attention for it eliminates throttle valves and achieves high energy efficiency.9–11 For a pump-controlled system, the position and velocity of the actuators are controlled by adjusting the pump displacement only. As the dynamic characteristic of the pump displacement adjustment mechanism is different from that of the valve-controlled system,12–14 oscillation of the actuators is observed while using the conventional proportional-integral (PI) controller which is widely used on valve-controlled system. This drawback has limited the application of the high-efficiency pump-controlled system. To improve control quality of pump-controlled linear actuators, a plenty of new technologies have been put forward. Sadamori et al. 15 tried to reduce velocity fluctuation by dynamically adjusting the pump swash plate. Ahn et al. 16 proposed a back-stepping algorithm to improve robustness of the pump-controlled system. Busquets and Ivantysynova 17 put forward an adaptive control based on back stepping. In addition, Kalmari et al. 18 and Park et al. 19 studied several kinds of nonlinear model–based predictive control algorithm. The common feature of the aforementioned algorithm is that the system nonlinearity was considered and the nonlinear models were used. But it is hard to implement such nonlinear algorithms on the hardware platforms of construction machinery at current status. So, a new controller based on PI algorithm and feed-forward compensation is put forward in this article. It is much more implementable than the nonlinear algorithms and achieves better dynamic performance than the conventional PI controller.
This article is organized as follows. Section “Pump-displacement-controlled linear actuators” introduces the structures of the pump-controlled linear actuators. And the variable swash plate piston pump and its adjustment mechanism are also introduced. The state-space model of the displacement adjustment mechanism is established in section “Modeling of the displacement adjustment mechanism.” Section “Controller design based on PI algorithm with feed-forward compensation” describes the new controller design. Simulation and experimental results are studied in section “Simulation and experimental study.” Finally, the effectiveness of the new controller is concluded and discussed in section “Conclusion.”
Pump-displacement-controlled linear actuators
Due to space limitation, the linear actuators are usually driven by single rod cylinders in construction machinery. Figure 1 shows the most recognized structure of pump-displacement-controlled linear actuator designed by Ivantysynova and colleagues.12–14 A swash plate variable pump is used as the main control element. Usually, the pump is driven by a diesel engine running at certain speed. The motion of the actuator is controlled by adjusting the displacement of the pump. Because of area difference of the cylinder, QA is larger than QB. To compensate the flow difference, two pilot directional valves marked as d1 and d2 are used to keep the low-pressure line to connect with the low-pressure power source marked as c. The structure of the variable pump is shown in Figure 2. It can be seen that the displacement is determined by the adjustment mechanism which is composed of a swash plate (1), a control cylinder (4), and a control valve (9). As for rotational actuators, the hydraulic circuit is similar to Figure 1. Still, the flow compensation components are also necessary for flow leakage always exists.

Classic structure of a linear-pump-controlled actuator.
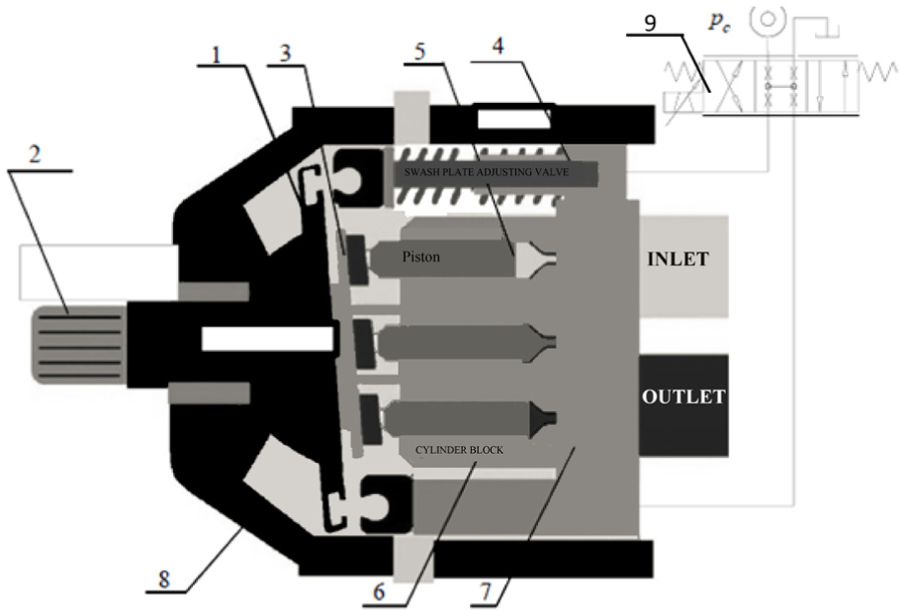
Structure of swash plate variable piston pump.
Modeling of the displacement adjustment mechanism
To study the dynamic characteristic and to find a suitable algorithm for the control system, the mathematic model of the adjustment mechanism was established first. Figure 3 shows the main parameters of the pump.

Displacement adjustment mechanism of a swash plate piston pump.
Pressure equations of the displacement adjustment mechanism
The pressure change rate can be derived by the continuity equations (1) and (2)


where Koil is the fluid bulk modulus of elasticity (N·m–2); VC,A and VC,B are the volumes of the two cylinder chambers; PC,A and PC,B are the fluid pressure of control cylinders (MPa); QC,A and QC,B are the flow rate of two control cylinders (m3·s–1); xp is the piston displacement (m); APc is the area of the cylinder piston (m2); and KLp is the leakage coefficient.
According to flow continuity equation, QC,A = −QC,B = QC and VC,A = VC,B = VC can be obtained. If the internal leakage is ignored, the two pressure equations listed above could be combined into one equation

where Δp is the pressure difference of the two control cylinders (MPa); QC is the flow rate of the control cylinders (m3·s–1); and CH is the fluid capacitance (m3·Pa–1).
Dynamic model of the swash plate control system
According to Newton’s second law, the dynamic model of the swash plate mechanism can be described as equation (4)

where JP is the swash plate inertia (kg·m–2); β is the swash plate angle (degree); kx is the stiffness coefficient of spring (N·m–1); fv,p is the piston damping coefficient of the control cylinder (N·s·m–1); rp is the radius of the swash plate (m); and Mx is the control torque of the swash plate. The value of Mx equals the torque that is produced by the pistons of the variable pump and is a function of the pump rotating speed, the swash plate angle, and the pump output fluid pressure. 14
For β is in the range of ±0.34 rad which can be seemed as a small angle, small-angle approximation is considered here

Then equation (4) can be simplified as equation (6)

State-space equation of the displacement adjustment mechanism
If Δp, β, and
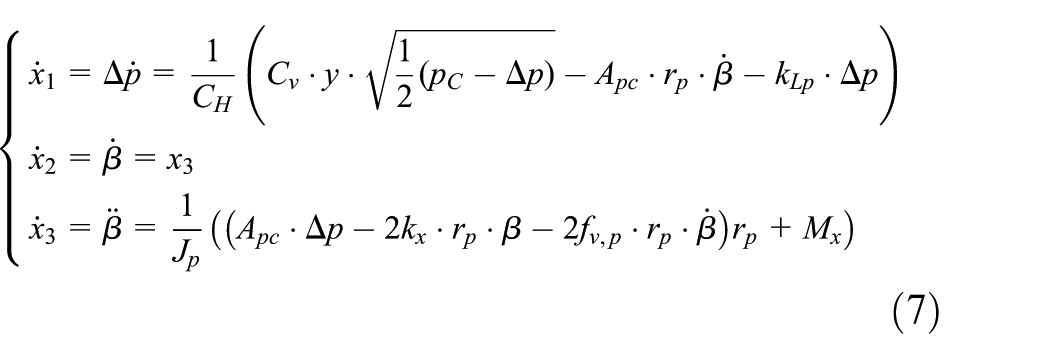
where Cv is the flow gain coefficient of the control valve (m3·s–1) and y is the displacement of the valve spool.
Controller design based on PI algorithm with feed-forward compensation
The currently used pump-controlled actuators are mainly controlled by PI algorithm with swash plate angle as the feedback variable. The drawback is that the system dynamic response is very slow and the tracking error is too large. 12 To improve the control quality, a new item named feed-forward compensation is added to the conventional PI algorithm. This item is based on the mathematic model of the displacement adjustment mechanism. The new algorithm is described in equations (8)–(10) where uf is the new item and ub is calculated by a PI controller



For uf is based on the mathematic model of the displacement adjustment mechanism, the transfer function which describes the relationship between the control input u and the output β must be established. It can be found from equation (7) that u and β are fourth-order related. It is fairly complex and hard to implement in the current hardware platform of the construction machinery. So, equation (7) must be simplified. The flow equation of the control valve can be linearized by Taylor expansion and first-order approximation. We take the middle position, where both y and Δp are equal to zero, as the start point. Then, the simplification process can be described in equations (11) and (12)

After calculation, equation (12) is derived

Changing rate of both pc and Mx is slow (usually slower than 10 Hz), while the response frequency of the control valve is very high (usually higher than 50 Hz). As dynamic process is mainly determined by the slower item, the dynamic features of the control valve can be ignored here. Then, equation (13) is obtained

After taking small-angle approximation, equation (13) can be simplified to equation (14)

Equation (14) shows the relationship between control input u and the swash plate angle β, then uf can be determined by equation (15)

where
So, the new controller based on PI algorithm combined with feed-forward compensation is integrated into equation (16)

After the Laplace transformation of equations (8)–(10) and (14)–(16), the control block diagram could be acquired. It is shown in Figure 4.
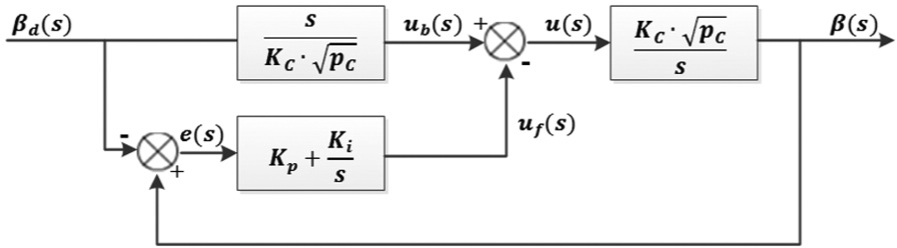
Block diagram for the new controller.
Simulation and experimental study
To verify the effect of the new controller, simulation models of the conventional PI and the new algorithm were established, respectively. The parameters of the variable pump and adjustment system are listed in Table 1.
Main parameters of the pump and adjustment system.

The two simulation models depicted in Figure 5 were built up using MATLAB/Simulink. It can be seen that the sub-models of displacement adjustment mechanism in the two system models are the same. For the new controller, Kp and Ki are set to 3.6 and 0.5, respectively. And for the conventional PI controller, Kp and Ki are set to 3.5 and 0.5, respectively.
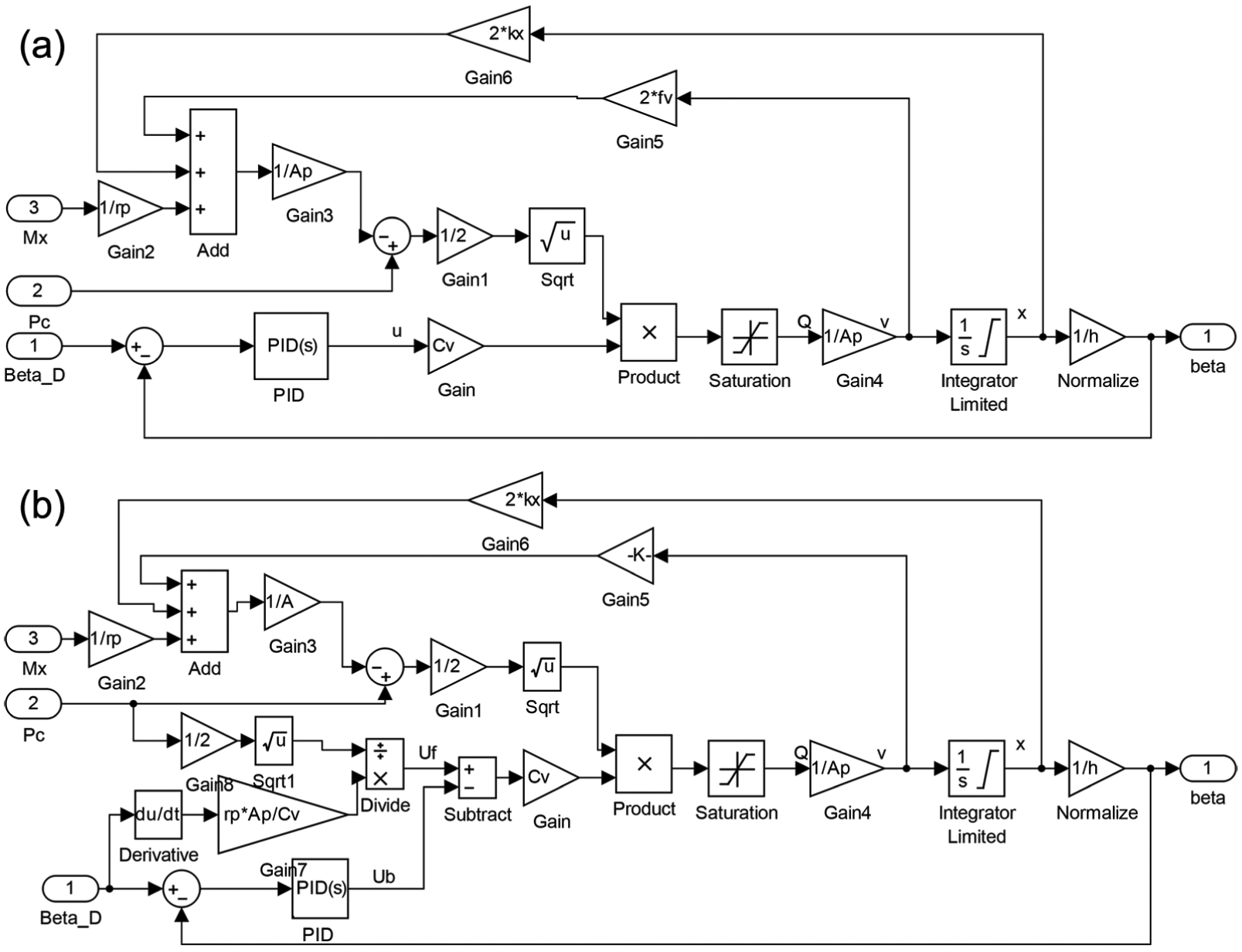
Simulation model for (a) PI algorithm and (b) PI with feed-forward compensation.
For simulation, the rotating speed was set to 2200 r·min–1, the system pressure was set to 22 MPa, and the control pressure Pc was set to 3 MPa. Then, Mx was calculated using the method described in Grabbel and Ivantysynova. 14 It was about 4.5 N·m. The normalized sinusoidal signal and step signal were chosen as the input stimulus, and the output value was recorded respectively. The two simulation results of the swash plate angle are plotted in Figure 6. The results show that with sinusoidal signal as input stimulus, the largest tracking error is within 6% for the new controller while it is 12% for the conventional PI controller. While with step signal as input stimulus, the response of the new controller is 0.002 s faster than the conventional PI controller when the amplitude value reached 66.7%. Moreover, the maximum overshoot of the new controller is smaller by 2.8% compared to the conventional PI controller.

Simulation results for different control input: (a) sinusoidal response and (b) step response.
After simulation, experimental studies were carried out. The structure of the test rig is depicted in Figure 7. The parameters of the main components are listed in Table 2. The controller of the test rig was composed of LabVIEW PACS and MATLAB/Simulink. The control algorithms were implemented by MATLAB/Simulink.

Structure of pump-controlled actuator test rig.
Key components of pump-controlled actuator test rig.

The control input was a sinusoidal signal. Its frequency started at 0.25 Hz and increased with time. Figure 8 plotted the dynamic response of the pump swash plate angle controlled by the two algorithms, respectively. The experimental results show that both the controllers could achieve high tracking accuracy at low load-changing rate. However, as load-changing frequency increases, the tracking error becomes larger and larger for the conventional PI controller. It is about ±20% when the frequency of the sinusoidal signal reaches 2 Hz with full amplitude while it is within ± 6% for the new controller. Obviously, the new controller performed much better at the aspect of dynamic response and tracking accuracy. The experimental results and the simulation results are consistent.

Results of swash plate angle control with different algorithms: (a) tracking effect and (b) tracking error.
Conclusion
The pump-controlled hydraulic system is a promising solution for high-efficiency construction machinery. However, the linear actuator’s dynamic response and tracking accuracy are not satisfactory in its current level. This article proposed a new algorithm based on PI combined with feed-forward compensation to improve the dynamic performance. Simulation and experimental studies were carried out and the following results were acquired:
If the control torque is set to 4.5 N·m and the low pressure source is set to 3 MPa, the simulation results show that with sinusoidal signal as input stimulus, the largest tracking error is within 6% for the new controller while it is 12% for the conventional controller. While with step signal as input stimulus, the response of the new controller is faster by 0.002 s than the conventional PI controller when the amplitude reaches 66.7%. Moreover, the maximum overshoot of the new controller is smaller by 2.8% compared to the conventional controller.
If the load pressure is set to 22 MPa and the low pressure source is set to 3 MPa, the experimental results show that both the controllers can achieve high tracking accuracy at low frequency. However, as frequency increases, the tracking error becomes larger and larger for the conventional PI controller. It is about ±20% when the frequency of the sinusoidal signal reaches 2 Hz with full amplitude while it is within ±6% for the new controller.
Through simulation and experimental studies, conclusions can be made that the new controller based on PI with feed-forward compensation achieves much better performance and could fulfill the dynamic requirement for most construction machinery. But it should be noted that the conclusion is acquired under the conditions of constant pump speed and load pressure. In the future, more studies should be done under the conditions of fluctuated speed and dynamic load.
Footnotes
Handling Editor: Fakher Chaari
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by the National Natural Science Foundation (grant no. 51205368) and the Natural Science Foundation of Zhejiang Province (grant no. LY17E050001), and Experimental Technology Development Projects: Pump-Controlled Fluid Drive Test Bed Research and Production (grant no. SJ201720).