
Abstract
This article addresses the control and stabilization problem of bilateral teleoperator system with input quantized by the so-called hysteresis-type quantizer, where the joint actuator model, robot dynamics, and kinematics are uncertain. In order to overcome the control issue that only discrete and finite control values can be applied to the robot dynamics, a decomposition-based technique is adopted to cope with the quantized control signals. By incorporating the Nussbaum-gain function to the proposed controller, an adaptive telecontrol scheme together with the parameter updating laws is developed to achieve position and velocity tracking of teleoperator system in the presence time delays without a priori knowledge of actuator and quantizer model parameters, upon which, the robot dynamics and kinematics uncertainties are also effectively accommodated. It is proven by the Lyapunov method that the closed-loop dynamics are bounded, and the position as well as velocity tracking errors converges to zero. Simulation results verify the proposed adaptive telecontrol scheme.
Introduction
The past two decades have witnessed a rapid development on bilateral control for teleoperator system due to its powerful capabilities on accomplishing complicated tasks in remote or hazardous environments, including outer space exploration, surgical operations, nuclear plant handling, and so on.1–6 Bilateral teleoperation system, commonly comprising remote and local robots, extends the human operation capability and self-perception to execute the specific task from local robots to remote robots, giving humans the high degree of adaptation to handle unexpectable changes. To achieve such objectives, many results have been devoted to the bilateral control for teleoperation systems via the scattering theory or the wave variables.1–3,7 However, this kind of classic scattering transformation scheme cannot ensure position coordination in the sense that the position errors between remote and local robot asymptotically converge to zero. Thus, the study on teleoperator control without using the scattering theory becomes a mostly control theoretic arena.
To cope with the position and velocity synchronization for bilateral teleoperator system subject to dynamic and kinematical uncertainty without using the scattering theory, some outstanding works can be found in the previous literature.8–19 The results in literature8–12 demonstrate that adaptive P-type or PD-type controllers can globally stabilize the teleoperation system under constant or variable time delays, simultaneously providing favorable performance of joint-space position and velocity synchronization. Specially, the approaches proposed in Wang and Xie17,20 extend joint-space synchronization to task-space position/orientation coordination by exploiting the passivity property of the quaternion-based orientation kinematics. In the recent notable publications,13,14 adaptive delay-based control schemes are presented to achieve task-space position and velocity tracking for teleoperator system with uncertain dynamics and kinematics. However, one strict requirement of the above results8–17,20,21 is that the control signal generator must be physically equipped in the actuating mechanism, inevitably reducing the flexibility of robot operation in the hazardous and remote environment with access restrictions. An intuitive perception for teleoperator system is that the control signals should be transferred by the wireless devices rather than the physical connection (e.g. control umbilical cord). To economize limited communication bandwidth, the control signals are required to be processed by the so-called quantizer such that a continuous signal is mapped to discrete finite sets.
Along the line of quantized control input, some novel results are given in literature.22–28 By utilizing uniform quantizer, 22 the control signals are divided into equivalent and average quantization blocks, yet, this kind of quantizer is generally not applicable to the asymptotically tracking control since only fixed quantization level is available even if exact quantization precision is required. To overcome this issue, logarithmic quantizers are adopted in the works by Fu and Xie 23 and Xing et al., 24 and the adaptive control schemes are based upon the sector-bounded property of quantization errors to design appropriate control laws. In previous literature,25–28 hysteretic quantizer, which can be regarded as a combination of two logarithmic quantizers with identical gain but opposite direction, is used to avoid chattering phenomenon. However, the above results assume that the structural property and exact parametric knowledge of the adopted quantizer are known in the controller design, which seems unpractical since the model parameters are user-defined and adjusted to obtain optimal control performances. Moreover, it is still unclear how to design the control algorithms for the bilateral teleoperators with hysteresis-like quantized input, simultaneously accommodating the quantizer model uncertainties as well as dynamic and kinematical uncertainties. Thus, quantized input control for teleoperators remains an open problem.
Besides, another possible restriction of the traditional teleoperator control8–17,20,21 is the assumption of perfect and accurate actuator output during the whole execution period. It is well known that the actuator is actually uncalibrated and varies with the temperature of electronic component, yet, only few results are reported in the works by Cheah and colleagues29–31 to aim at this control topic. These solutions cope with the actuator uncertainties by establishing an adaptive model parameter updating law to online estimate the uncalibrated actuator model. Unfortunately, such adaptive techniques are only robust to the constant or slow time-varying parameter case, and the results in Wang et al.30,31 focus on joint servoing loop control rather than torque-based control. In particular, the nonlinear couplings between the actuator mechanism and quantizer operations inherently exist in the robot dynamics, making the control design for teleoperator system more challenging.
Motivated by the above-mentioned analysis, we shall specifically attack the telecontrol problem for robotic teleoperator system with quantized input from a new perspective that the quantizer model parameter, actuator models, robot dynamics, and kinematics are not exactly obtainable. The contributions of this article is mainly threefold:
For the sake of avoiding chattering phenomenon and obtaining variable quantization levels along with the control input, hysteresis quantizer is adopted, and the robotic dynamics preceded by quantized inputs distinguish our work from the traditional teleoperator control schemes.8–17,20,21 Via fully exploiting the structural feature of hysteresis quantizer and utilizing the sector-bound property, a novel decomposition-based method, which is inspired by the works by Zhou et al. 25 and Wang et al., 28 is subsequently developed to cope with the control issue that only limited and quantized control inputs are available (see Theorem 1), for which the control design and stability analysis for the bilateral teleoperator system turn out to be feasible.
To achieve precise position and velocity tracking control, actuator uncertainties are also considered. By incorporating the Nussbaum-gain function to the proposed controller, the control difficulties resulting from the nonlinear couplings between actuator mechanism and quantized operations are then conquered without an exact knowledge of actuator model and quantizer parameters, in contrast to the existing related works on actuator uncertainties29–31 that require additionally computational resources to estimate the unknown actuator parameters.
With full considerations of the uncertain robot dynamics and kinematics, an adaptive telecontroller integrated with Nussbaum-type gains is established for the teleoperator system in the presence of constant time delays such that the position tracking errors and velocity errors converge to zero, extending the results in literatures8–17,20,21 to a more practical application.
Preliminary and problem statement
Robot kinematics and dynamics with actuator uncertainty and quantized input
In the teleoperation system, it is assumed that the bilateral manipulators(i.e. local and remote robots) are nonredundant. Let

where
Property 1
The robotic kinematics is linear in a set of kinematic parameters

where

where for
Property 2
The symmetric inertia matrixes
Property 3
The Coriolis matrices
Property 4
The Lagrangian robot dynamics (2) is linear in a set of dynamics parameters

where
Remark 1
In the most recent studies on bilateral control for the teleoperation system,13,14,17 the proportional actuator gains
Remark 2
In this article, it is assumed that the physical connection between controller and actuating mechanism is unavailable, in which case that a more practical and more rational requirement is considered in the bilateral teleoperation system. To economize limited bandwidth, the controller outputs
Problem formulation
In this work, the time delays

where
Problem 1
Suppose that the proportional actuator gains
Instrumental lemma
In this article, Nussbaum gain technique is adopted to cope with the unknown gain control problem. Any even function


where
Lemma 1
Suppose that

where
Then, according to Chen et al.
36
and Liu and Tong,
37
the following conclusions can be drawn:
Adaptive bilateral task-space controller for teleoperation system with quantized input
In this section, we investigate the adaptive task-space telecontroller design for the bilateral teleoperation system in the presence of time-varying proportional actuator gains, limited and partitioned control signals, and unknown kinematic parameters as well as dynamic parameters.
The hysteretic quantizer
As illustrated above, the control signals are transferred by wireless device such that the physical connections between controller and actuating mechanism can be removed. For the sake of reducing excessive information exchange, the control signals corresponding to the jth joint of ith manipulator are processed by the hysteretic quantizer25,28

where
Remark 3
It should be noted that another kind of frequently encountered quantizer is called the uniform quantizer, 26 whose characteristic lies in the fact that the quantization density is fixed. However, one possible weakness of this quantizer may be the phenomenon that limited quantization precision is available, since each of the quantization level is changeless due to the fixed quantization density, especially when the control signals approach to zero. Thus, hysteresis quantizer, as an extension of the logarithmic quantizer 26 and with the advantage of factitiously adjusting quantization density and avoiding signal chattering, is adopted in the bilateral teleoperation system.
Remark 4
It is worth mentioning that the quantization density coefficient

Map of hysteresis quantizer for
Theorem 1
The output of hysteresis quantizer

where
Proof
Actually, this theorem is visually reflected by the slopes of
P1. When

where
P2. When

where

and

The proof is completed.▪
Then, the teleoperator dynamics can be thus represented as follows

where
Remark 5
It is important to be noted that the modified gain matrixes
Controller design for teleoperator with quantized input in free motion
In this section, it is assumed that the teleoperators move in a external force–free environment such that

where for

where

Then, the task-space sliding vector is defined as follows

where

with the virtual controller being

where the Nussbaum gain matrices

where

where

where

where

where

where

where

where
Theorem 2
For a external force–free task space such that
Proof
Let us define a Lyapunov-like function candidate as follows
where

From equation (14), we have

Also, note that


Combining equations (27)–(29) and substituting (22) into (26), it can be obtained that

Using the relationships
Moreover, the following inequation holds
Thus, substituting the parameter updating laws (equations (22) and (24)) into equation (30) yields
Taking the time integration of equation (33) over
where
Hence, according to Lemma 1, we can obtain that
In this article, the external forces exerted on the remote and local robots are assumed to be passive maps as follows7,39

where
Theorem 3
If external forces exerted on the remote and local robots satisfy (equation (35)), then, the bilateral adaptive controllers (equations (15) and (16)) and the parameter updating laws (equations (19), (22)–(24)) ensure the position tracking and velocity tracking for the teleoperation system (equations (1) and (2)) with input modulated by quantizer (equation (6)), that is,
Proof
This proof can be briefly derived from the proof of Theorem 2. In the case that


Define the Lyapunov-like function candidate as
Simulation
In this section, the numerical simulations are presented to verify the performance of proposed telecontrol scheme by a pair of 2-DOF manipulators with revolute joints.
Models of robot kinematics, dynamics, actuator, and quantizer
The physical parameters of the teleoperator are listed in Table 1, where
Physical parameters of remote and local robot.

Let the joint angles be


Let the robotic dynamics parameters in Property 4 be




where
Finally, the quantizer parameters in equation (6) are shown in Table 2.
Model parameters of hysteresis quantizer.

Control performance of the proposed bilateral telecontrol scheme with quantized input
For the implement of adaptive controllers and parameter updating laws, the following control gains are adopted:
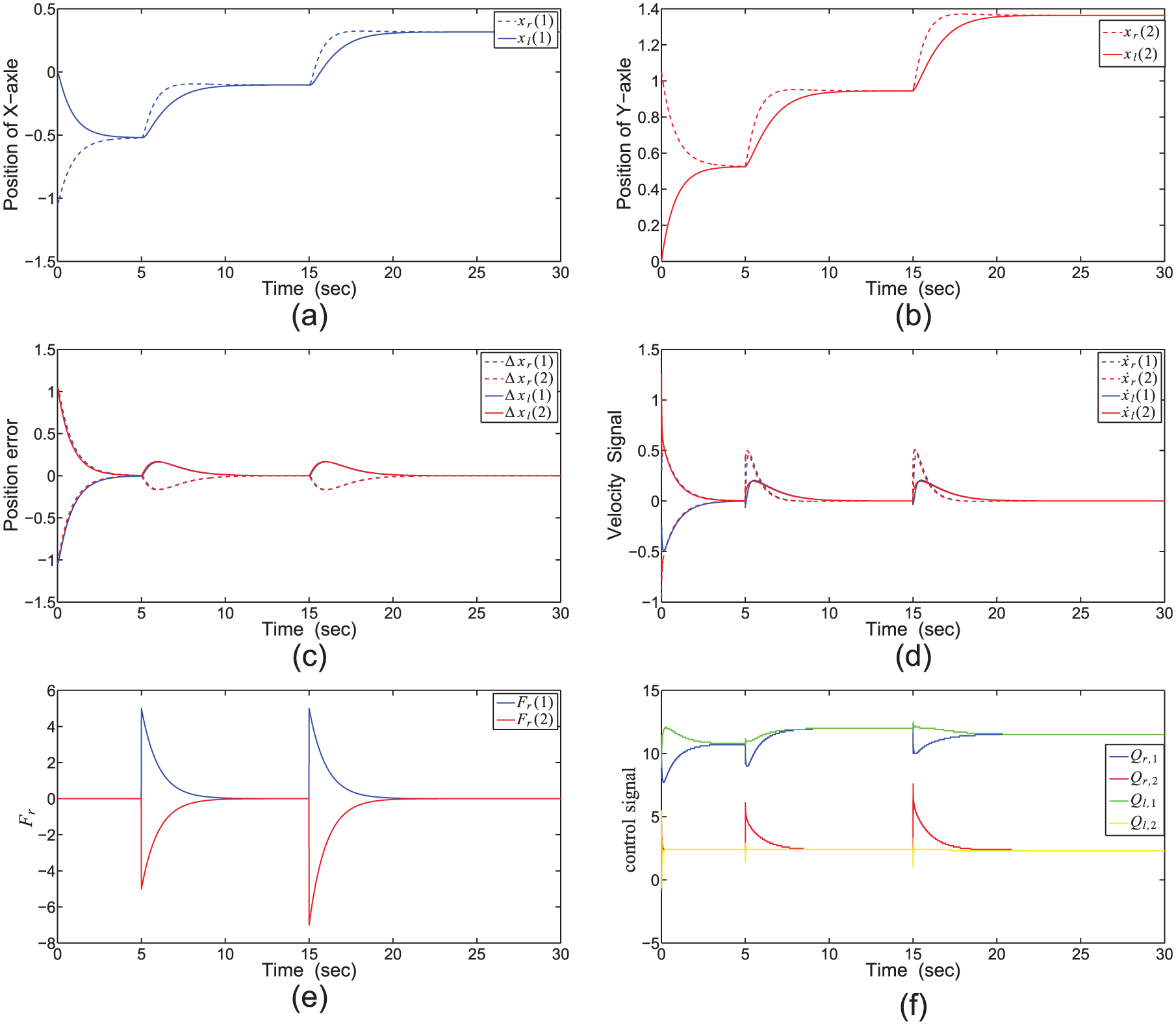
Performance results of adaptive telecontrol scheme: (a) position on X-axle, (b) position on Y-axle, (c) position error, (d) velocity signals, (e) external forces, and (f) control signal.
Conclusion
In this article, we analyzed the control problem of bilateral teleoperator system with hysteresis-type quantized input. By utilizing the sector-bound property, a decomposition-based method is applied to decompose the quantized signal into a linear part and a nonlinear disturbance-like part such that the control design is feasible. Moreover, an adaptive telecontroller integrated with Nussbaum-gain function is proposed to achieve position and velocity tracking of teleoperator system even the nonlinear couplings between actuator mechanism and quantized operations inherently exist in the robot dynamics. The stability of the closed-loop system is then analyzed by the Lyapunov theory in the sense of parameter boundedness. Finally, simulation results are presented to illustrate the effectiveness and performance of the adaptive telecontrol approach.
The problem of adaptive bilateral telecontrol problem was investigated in this article. However, it is well known that fuzzy and neural control are also widely used in robot system. Therefore, one of the possible future works would be adaptive fuzzy and neural network control41–46 for nonredundant teleoperators.
Footnotes
Handling Editor: Chenguang Yang
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported in part by the National Natural Science Foundation of China under grant 61573108, in part by National Natural Science Foundation of China (U1501251), in part by the Natural Science Foundation of Guangdong Province 2016A030313715, in part by the Natural Science Foundation of Guangdong Province through the Science Fund for Distinguished Young Scholars under grant S20120011437, and in part by the Ministry of Education of New Century Excellent Talent under grant NCET-12-0637.