
Abstract
Aiming at attitude tracking control for hypersonic reentry vehicle, an adaptive backstepping controller based on sliding mode disturbance observer is proposed in this article. First, the strict-feedback nonlinear model with uncertain aerodynamic parameters and external disturbances for the hypersonic reentry vehicle is established. Then, a sliding mode disturbance observer is designed to estimate external disturbances for the proposed controller. In addition, the adaptive backstepping controller with the sliding mode disturbance observer is proposed, in which adaptive strategies are used to estimate the uncertain aerodynamic parameters online. Finally, according to the Lyapunov theorem, the tracking errors of the closed-loop attitude stabilization system are proved to be ultimately bounded. Simulation results show that the proposed controller can achieve adaptive tracking control under the influences of parameter perturbation and external disturbances.
Keywords
Introduction
Recently, hypersonic reentry vehicle (HRV) control is the hotspot in aeronautics and astronautics research field.1–5 The hypersonic vehicles have the characteristics of hypervelocity, complexity, and fast time-varying environment. Hence, it is difficult to obtain the atmospheric parameters and dynamic characteristics in such a complex flight environment. There are some challenges in the tracking control for HRV such as nonlinearities, parameter uncertainties, and external disturbances. Therefore, it is necessary for the flight control system to have adaptiveness and strong robustness. To suppress the external disturbances and parameter uncertainties in the HRV nonlinear control, the adaptive backstepping controller with sliding mode disturbance observer (SMDO) is proposed in this article.
To solve the problems in the HRV attitude tracking control, disturbance rejection techniques have been widely concerned in the controller design. Researchers proposed a lot of control methods, such as adaptive method, backstepping method, robust method, sliding mode method, and the combinations.6–10 Compared with these methods, backstepping method is effectively used for controller design in strict-feedback nonlinear system with mismatched uncertainties.2,5 It can simplify the nonlinear system via virtual control variables. The adaptive method is adopted to estimate the uncertain aerodynamic parameters, which are usually regarded as unknown matrices.6–10 An adaptive backstepping controller 8 was designed for a winged missile model with uncertain parameters which were estimated by adaptive laws. An adaptive terminal sliding mode controller 9 for missile pitch channel was designed to achieve steady tracking for velocity and path angle. Assuming that the external disturbances were slowly varying, an adaptive backstepping method 10 was proposed with adaptiveness and robustness for external disturbances and uncertain parameters. Although the adaptive backstepping method has strong adaptiveness and robustness to uncertainties, the method can only attenuate the influences of external disturbances rather than eliminate them. Meanwhile, the uncertainties are usually assumed to be constant, which are unreasonable for practical engineering issues. Furthermore, the conventional backstepping method usually has the problem of “Calculated Expansion” caused by virtual variable derivation.11,12
Recently, disturbance rejection techniques of disturbance observers (DOs) are proved to be effective for compensating the influences of unknown external disturbances and model uncertainties for nonlinear control systems.13–15 Some researchers used the DOs to estimate the disturbances of the flight control system.16–20 Based on the linear extended state observer (ESO), the robust controller 16 was proposed to realize the velocity and attitude tracking under the assumption of linear model. A nonlinear DO 17 based on sliding mode backstepping controller was designed to estimate and compensate the model uncertainties. Combining sliding mode control with trajectory linearization control, a composite controller 18 was proposed based on ESO to eliminate the effect of uncertainties. A robust flight controller 19 for a small quad-rotor vehicle was designed based on SMDO. Moreover, a recursive terminal sliding mode controller 20 based on SMDO was proposed for the longitudinal dynamics of a hypersonic flight vehicle with parameter uncertainties, measurement noises, and external disturbances. However, the conventional controllers are usually proposed based on some assumptions like the constant uncertainties, slow varying disturbances, or linear model.
Inspired by the researches above, we designed an adaptive backstepping controller with SMDO for the HRV attitude tracking control under parameter perturbation and external disturbances. The main contributions are summarized as follows. First, an adaptive SMDO is designed, which can estimate the external disturbances in the HRV model directly. Second, an adaptive backstepping control method is designed to realize the ultimately bounded control of the HRV system. Finally, the unknown aerodynamic parameters can be estimated online by the proposed adaptive laws. Detailed theoretical analyses are carried out in the design process of the proposed control scheme.
The structure of this article is organized as follows. In section “Modeling,” the HRV nonlinear dynamic model is established and controller structure is introduced. In section “SMDO,” the SMDO is designed to estimate the external disturbances. In section “Adaptive attitude tracking controller,” the adaptive backstepping controller based on SMDO is proposed. Finally, simulation results and conclusion are given in sections “Simulation and analysis” and “Conclusion,” respectively.
Modeling
Dynamic model and problem formulation
In this article, the influences of the earth rotation and ground curvature are ignored. 4 Since control moments are only provided by aero-surfaces, the flight vehicle is regarded as ideal rigid body with constant mass. The structure of the hypersonic vehicle is illustrated in Figure 1.

HRV configuration.
The HRV dynamic equations are formulated as

where
The functions of aerodynamic moments and aerodynamic parameters are as follows
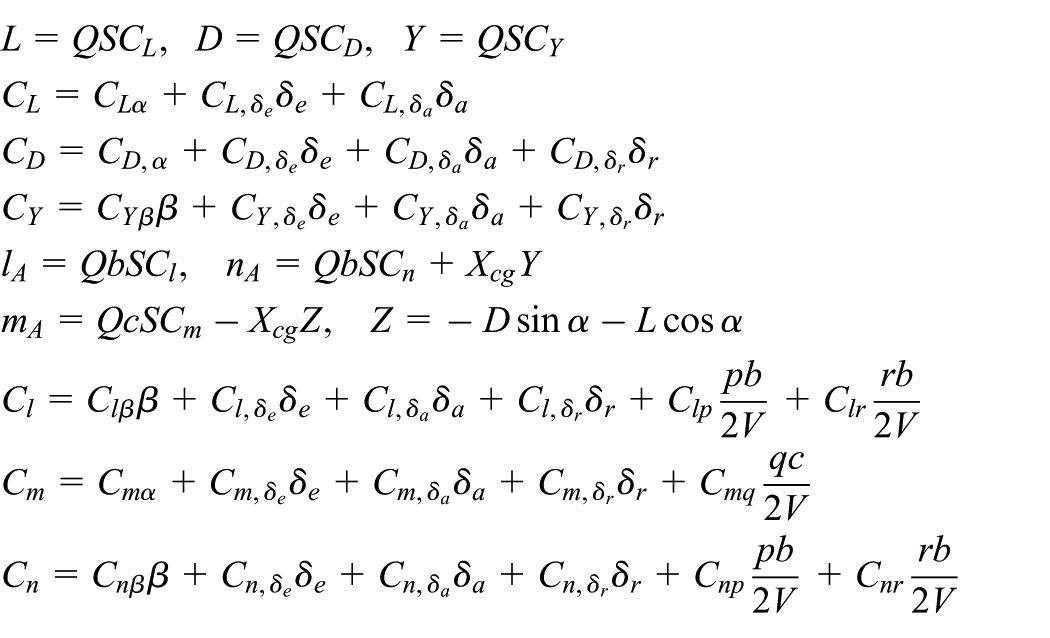
where
The system (1) can be transformed to the affine nonlinear form as follows

where
Uncertain model of attitude stabilization loop
The uncertain aerodynamic parameters for the HRV are considered as matrices to be estimated. Thus, the HRV dynamic model is expressed as follows

where




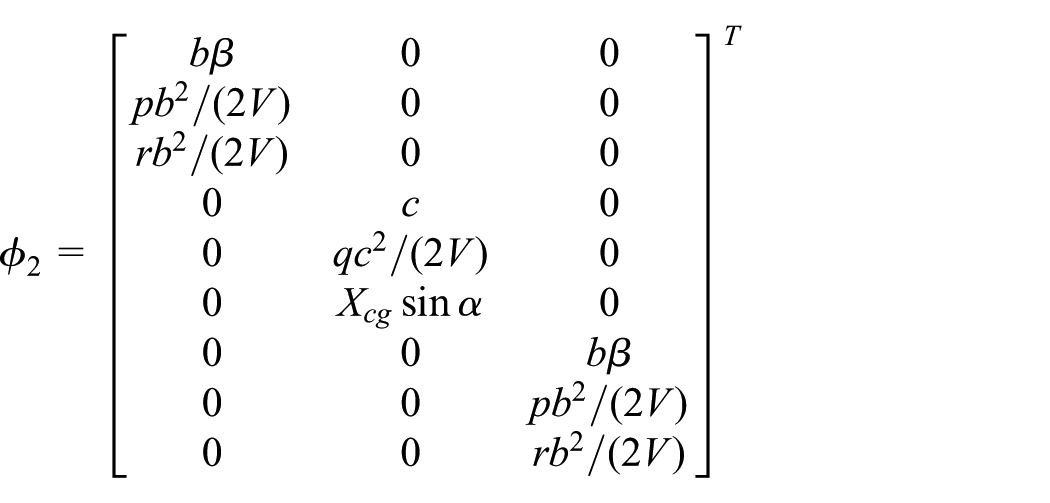
where
In system (3), the tiny influences of rudder deflection on control force are ignored.
22
We define

The control objective for system (4) is to realize that the tracking errors asymptotically converge to a neighborhood of zero.
In order to facilitate the design of the controller, three assumptions are given as follows:
Assumption 1. The reference signal
Assumption 2. In the compact set
Assumption 3. Given
For system (4), the structure of the proposed adaptive backstepping controller with SMDO in this article is shown in Figure 2.

Structure of the proposed adaptive backstepping controller with SMDO.
SMDO
In this section, an SMDO is designed to estimate the bounded external disturbances
The auxiliary variable error is defined as

The derivative of

where
The disturbances estimation

where
The adaptive laws are designed as

Theorem 1
Considering equation (6) with the estimations
Proof
By substituting equations (4) and (6) into equation (5), the time derivative of
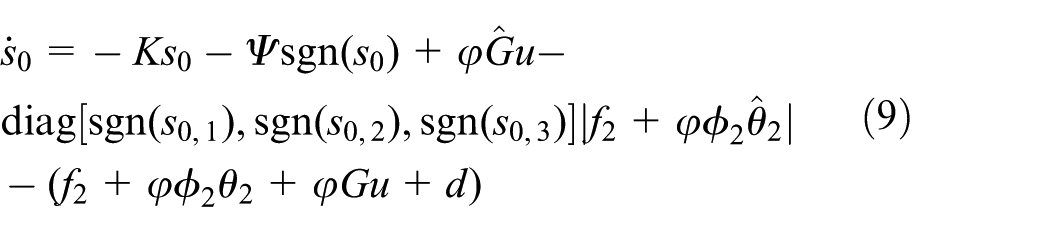
Equation (9) can be expressed as

where
The Lyapunov function candidate is chosen as

The derivative of V is obtained as
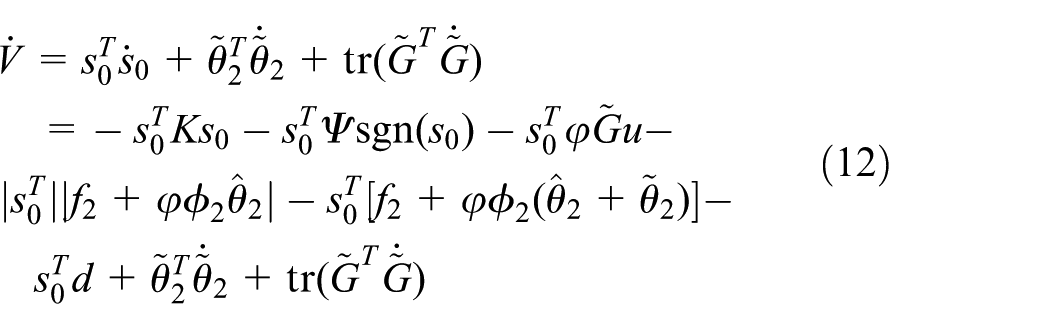
Given

Then,

Therefore,

Thus, the conclusion that systems (5) and (6) are Lyapunov stable can be obtained and the observer error variable
Adaptive attitude tracking controller
In this section, the adaptive backstepping controller is designed to guarantee the tracking errors ultimately uniformly bounded.
Step 1
The tracking error of

where
The derivative of tracking error

The virtual control with respect to

where
Substituting equation (18) into equation (17), we obtain

where
The Lyapunov function candidate is chosen as

where
The derivative of

The adaptive law is designed as

Thus, equation (21) can be expressed as

Step 2
The derivative of virtual control

where
The filtering error is defined as

Then,

where
To prove that the state errors are bounded, the error variable

To compensate the influences produced by external disturbances
The derivative of

The normal form of backstepping controller is designed as

where
To avoid the singularity, the generalized inverse matrix of

With the additional matrix
The proposed controller is designed as follows

where


The auxiliary variable is defined as
The adaptive laws are designed as



Theorem 2
When the assumptions 1, 2, and 3 hold, tracking errors and parameter estimation errors of system (4) are ultimately bounded with the controller (31)–(33) and the adaptive laws (22) and (35)–(37).
Proof
To prove the errors of the closed-loop system are ultimately uniformly bounded, the Lyapunov function candidate is chosen as

where
The derivative of

Here, we use the equality that

Substituting equations (31)–(33) into equation (28), we obtain

Substituting for

Considering equations (10) and (13), the following inequality is obtained

Substituting equations (26), (28), and (43) into equation (39),

Considering adaptive laws (22), (36), (37), and


According to assumptions 2 and 3, controller (31)–(33), adaptive law (35), and

where
Given

Substituting equations (45)–(50) into equation (44), we obtain

The following inequalities can be obtained by adjusting the control gains

Then,

where
Integrating

The above analyses proved that both the tracking errors of system states and the estimation errors of uncertain parameters are bounded.
Simulation and analysis
In this section, numerical simulations are given to demonstrate the adaptiveness and robustness of the proposed method. The initial conditions and parameters of HRV are given in Table 1.
Initial conditions and parameters.

Simulations are performed in two cases to show the adaptiveness and robustness of the controller proposed in the article.
Case 1
To verify the adaptiveness and robustness of the proposed adaptive backstepping controller with uncertain parameters, we suppose the stochastic uncertain aerodynamic parameter perturbations are as follows.
The aerodynamic parameters increase or decrease randomly between 0% and 30%. Meanwhile, step aerodynamic parameter perturbations are also assumed to exist, which will reduce the aerodynamic parameters by 20% at t = 0 and increase the aerodynamic parameters by 20% at t = 3 s.
The conventional backstepping controller is considered as a comparison


Simulation results are shown in Figures 3 and 4.

Response curves of attitude angles (α, β, μ): adaptive backstepping method (blue dash line) and backstepping method (red dot line). (a) Attack angle α, (b) sideslip angle β, and (c) roll angle μ.

Response curves of deflection angles
Figure 3 shows responses of attitude angles under the two kinds of controllers. The two response curves are obtained by applying the conventional backstepping controller and the proposed adaptive backstepping controller, respectively. It can be noted that the responses curve under backstepping controller has obvious oscillations. However, the controller proposed in this article has fast and smooth response curves of the attitude angles. The adaptive strategies improve adaptiveness for parameter perturbations. The desired trajectories can be tracked smoothly and effectively.
Figure 4 shows responses of the control inputs in the simulation results. As the attitude angles converge to their command signals, the control inputs gradually tends to stable values. And the deflection angles under the proposed controller are more smooth. From Figures 3 and 4, it can be concluded that the adaptive backstepping controller have better performance than the conventional backstepping controller.
Case 2
Suppose that there are bounded external disturbances

Simulation results are shown in Figures 5–7.

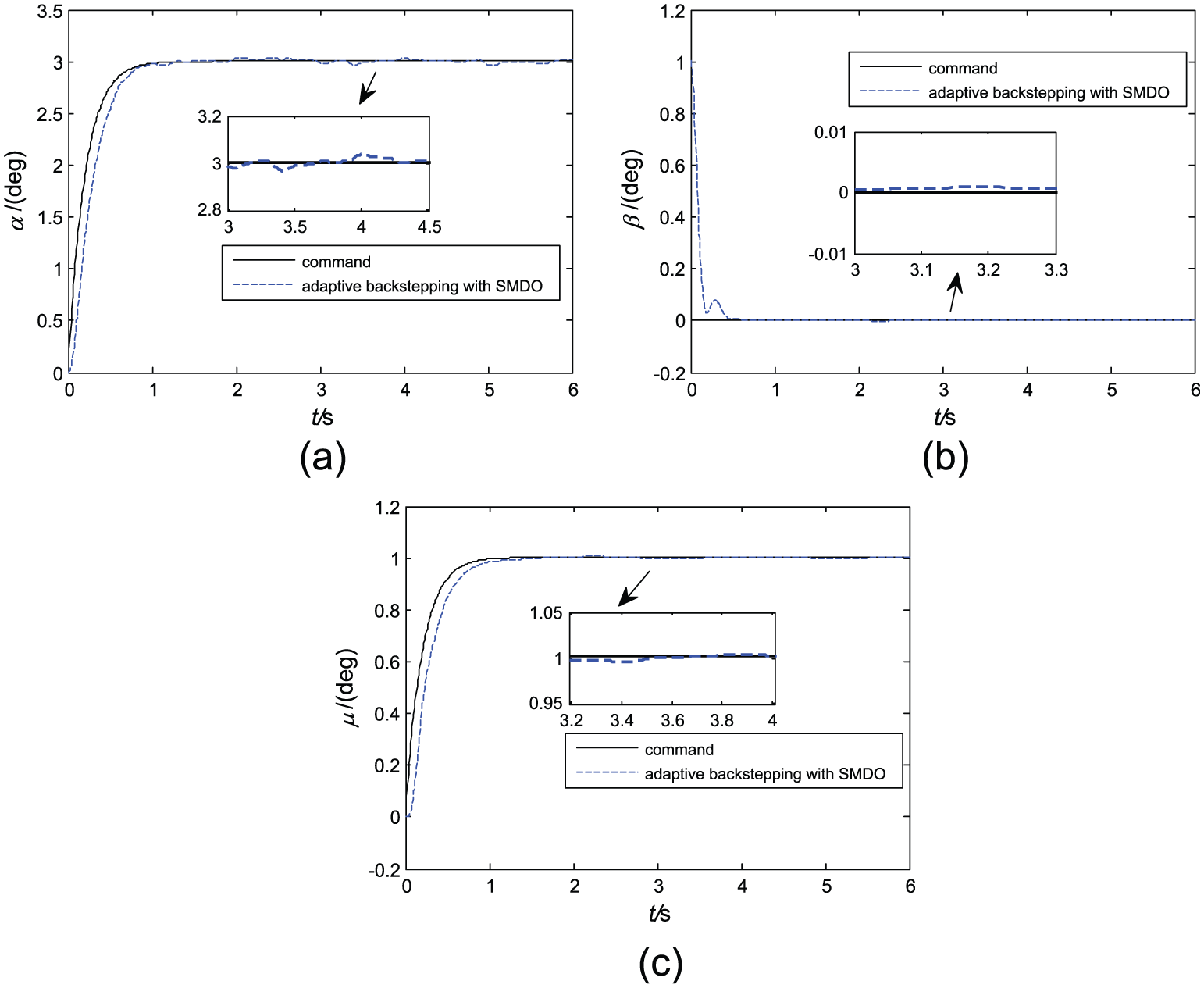
Response curves of attitude angles (α, β, μ): adaptive backstepping method with SMDO (blue dash line) and the backstepping method (red dot line). (a) Attack angle α, (b) sideslip angle β, and (c) roll angle μ.

Response curves of deflection angles

Response curves (red dash lines) of estimation by SMDO: (a) roll disturbance d1, (b) pitch disturbance d2, and (c) yaw disturbance d3.
Figure 5 shows the angle tracking response curves with and without SMDO compensation. Simulation analyses are performed to verify the robustness of the adaptive backstepping controller based on SMDO under case 2. It can be noted that the tracking performance of the adaptive backstepping controller without SMDO remarkably degrades when external disturbances
Figure 6 shows responses of the control inputs under case 2. Because of the external disturbances
Figure 7 shows the performance of SMDO estimating external disturbances
Moreover, to verify the influences of measurement noises on the proposed controller, the white Gaussian noises considered as general measurement noises are added in case 2. The simulation results with random noises are shown in Figure 8.
Response curves of attitude angles (α, β, μ) with measurement noises under proposed controller (blue dash line): (a) attack angle α, (b) sideslip angle β, and (c) roll angle μ.
It can be seen that the response curves with measurement noises can still converge to desired trajectory with small deviation. The proposed controller is still valid demonstrating robustness under the measurement noises.
Conclusion
The article studied the HRV system with uncertain parameters and external disturbances. The adaptive backstepping controller based on SMDO is proposed for the HRV attitude tracking control. The SMDO is proved to be effective on estimating the external disturbances. In addition, the adaptive strategies are used to estimate the uncertain parameters. Simulation results show that the tracking errors of system states and disturbance estimation errors are ultimately bounded.
Footnotes
Acknowledgements
The authors contributed equally to the research and computational parts of the work. They jointly wrote the paper and approved the final manuscript.
Handling Editor: Crinela Pislaru
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) received no financial support for the research, authorship, and/or publication of this article.