
Abstract
This work concerns the growing interest in accessible tourism and describes the early stages of development of Gölem project. In particular, it takes into account accompanying activities of disabled people in mountain areas. Although literature and market analysis highlight the presence of different technical solutions used for the movement of disabled persons on rough terrains, there are only a couple of solutions based on the help of guides: Joëlette© and TrailRider©. Even if the use of these devices is generally satisfactory, our analysis has highlighted the presence of some limitations such as the difficulty of maintaining the lateral balance of the devices (which involves a considerable physical effort for the guides) and their reduced comfort for the passenger. This article describes the activities developed within the Gölem project. Its main goals are to design and to test an improved model of trekking/hiking wheelchair taking into account passengers comfort and better functionality of the device. At this moment, the design and modeling phases with the definition of dynamic parameters and of the suspension system of the device have been completed. The prototype implementation phase is in progress. Future activities will provide validation and field testing of the new solution with users.
Keywords
Introduction
Accessible/Inclusive Tourism—AT—represents the set of tourist services and products which consider the needs of a full range of consumers including disabled people, elderly/seniors, and cross-generational families. In fact, AT entails removal of attitudinal and institutional barriers in society and encompasses accessibility in the physical environment, transportation, information and communications, and other facilities and services. 1
In this scenario of constantly aging population, in particular the European one, and of continuous updating of the legislative framework for disabled people, the increasing evolution of technical achievements contribute to make AT more and more popular and to increase the demand of various types of touristic activities. 2
This work takes into account the context of AT in the mountain areas and in particular the activity of accompanying people, with disabilities or reduced mobility on mountain trails using special types of chairs. 3
Literature and market analysis highlighted the presence of different technical solutions that allow the movement of disabled people on rough terrain, and these can be divided into three main categories: self-propelled wheelchairs designed for developing countries, self-propelled off-road/all-terrain wheelchairs, and a new category of devices that are classified as trekking/hiking wheelchairs—ISO code 30.09.39 (according to ISO 9999:2011—Assistive products for persons with disability: classification and terminology). The first ones are designed to be inexpensive and easy to assemble (using low-cost components mainly derived from the bicycle sector) and to be used in replacement of traditional wheelchairs when terrain, street, or sidewalk conditions do not allow the use of normal ones.4–7 The second ones represent technically advanced solutions and have a different range of price and require a high degree of driving autonomy by their users (e.g. autonomous paraplegic and non-tetraplegic persons).8–11 The third category represents a special type of trekking/hiking wheelchair which is not self-propelled but is intended to be used as a means of transport for people with disabilities or with difficulty in movement, and it can be thought of as a kind of sedan chair with a wheel.12–14 In reference of this last type of chair, in literature, few documents describe their design and development processes or their technical characteristics. Actually, there are only a couple of commercially available solutions of these trekking/hiking chairs: Joëlette© and TrailRider©15,16 (see Figure 1). They are characterized by a single-wheel configuration with an ergonomic cushioned seat equipped with safety belts. Each of the two devices has a back handle and a front pair of arms that allow the accompanying persons or guides to handle them for moving and carrying disabled people on different types of terrains.

The use of these devices, although satisfactory, has highlighted some operating limits such as follows:
A certain difficulty by the guides to keep the chair in lateral equilibrium during a mountain trip, which entails a considerable energy dispersion and physical effort;
A limit to the comfort of the disabled persons being transported that precludes the use of these kind of chairs by people with a certain level or type of pathology.
Starting from these considerations, this article presents the activities developed during the first year of the Gölem project. The name Gölem derives from the name of Mount Gölem (Monte Guglielmo) that is the highest mountain (1957 m) near the University of Brescia. In particular, the main goals of this project are to design, develop, build, and test a new concept of trekking/hiking wheelchair that allows the mobility of disabled people on mountain trails or rough terrains not accessible by standard self-propelled wheelchairs.
The starting point of this work is represented by the optimization of the commercially available solution according to the limits previously indicated.
The activities carried out during the first year of the Gölem project are as follows:
Analysis of the actual marketed solutions, highlighting their advantages and disadvantages;
Study and definition of the new concept of the device with more emphasis on the definition of its new layout and its new suspension system;
Detailed design and 3D CAD modeling of the device and of its components.
This article describes and illustrates the results obtained during these activities. Ongoing and future activities will consider the realization of a prototype of the device and the execution (e.g. on the Gölem mountain) of field tests for the validation, verification, and optimization of dynamic parameters defined during previous project stages.
Analysis of commercially available solutions
As aforementioned, there are only two marketed models of these trekking chair, the Joëlette© and the TrailRider©, and since they are very similar, authors considered to analyze deeper only the Joëlette© versions.
At the moment, Joëlette© represents the target reference for trekking/hiking wheelchairs. It is offered in three different versions: the Classic one-wheel (or single-wheel) Joëlette©; the Joëlette© TWIN (version with two wheels), and the e-Joëlette©, that is a version with electric assistance. For the purpose of present project, only the Classic and the TWIN versions have been considered.
Analysis of the Classic Joëlette© version
The Classic Joëlette© is based on a single-wheeled architecture (bike layout). This particular layout solution replicates the principle of the wheelbarrow with the addition of a suspension system but still have all its advantages and disadvantages.
It is made up of a frame that also acts as a seat connected to a 20-in wheel through a trailing-arm suspension (Figures 1(a) and 2(a)). There are also two tubular arms attached in the front of the frame and one handlebar attached to the rear. The front arms allow guides to pull and to give the directions of the device, while the back handlebar is used to push and to maintain the balance of the device. 15
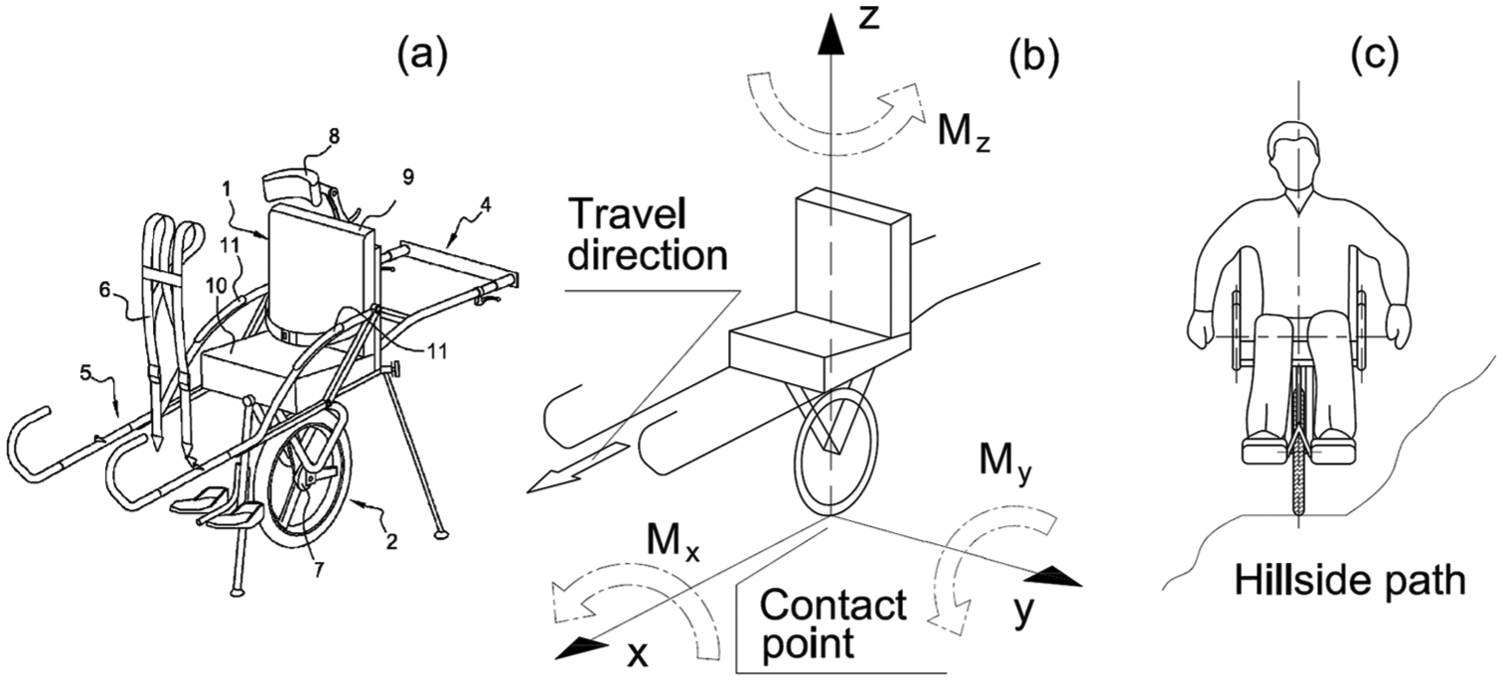
(a) Classic Joëlette© version, (b) schematization of the classic single-wheel solution and moments of forces, and (c) device overall dimensions on hillside path position.
Starting from the study of the instruction manual of Classic Joëlette©, 15 it has been possible to deduce that the single-wheel solution provides an exceptional agility, allowing to rotate the device around the device’s z axis as illustrated in Figure 2(b). Moreover, this solution enables to walk along narrow and rough trails, especially if they are placed on a hillside (Figure 2(c)).
As confirmed by some users,17,18 this solution presents some downsides. In fact, the device is difficult to balance and this condition forces the guides to spend a lot of energy to maintain the right position instead of pushing. This cause the need of superimposing a further balancing action of the moments My in the pitch plane (xz) and Mx in the roll plane (yz) as illustrated in Figure 2(b).
Usually, the practical solution adopted to overcome this kind of disadvantage is to add two more guides, one for each side of the device, thus bringing the total amount of accompanying persons from two to four. Nevertheless, this greatly reduces the versatility of the device on particularly narrow and rocky paths. Thus, to overcome the balancing problems of this single-wheel solution (schematized in Figure 3) and to ensure the safety of the passenger, during the necessary stops for the resumption or alternation of the guides, there is also the presence of removable support feet attached to the frame (Figure 2(a)).
Schematization of the Joëlette© single-wheel solution.
An additional limit to this version of Joëlette© is the comfort of the carried person. Indeed, although literature lacks studies on the comfort of trekking chairs, some users17,18 have noted that it is impossible to bring, with this type of device, people with a high degree of disability and/or particularly sensitive to high levels of stress or long periods of discomfort; excluding the opportunity to participate in this kind of socialization and inclusion activities. In fact, from a technical point of view, the use of the single-wheel configuration, placed under the center of gravity (COG) position, makes the device simple but does not allow the optimization of its kinematics and comfort. Moreover, this position restricts the use of wheels of large diameter that kinematically engage the obstacle at a lower angle and hence limit the uncomfortable longitudinal accelerations. It is also authors’ opinion that the activity of hiking on narrow and steep paths, where the use of a single-wheeled device is actually necessary, represents only a small percentage of the paths actually traveled with this type of devices and for which there are no particular problems of passengers’ comfort with regard to their degree of disability.
Analysis of the TWIN Joëlette© version
To overcome some of the limits previously highlighted, the Joëlette© TWIN version has been introduced by its manufacturer to allow a certain degree of roll stiffness. Actually, the TWIN version consists in a patented double-wheel kit (see Figure 4).19,20 It has been observed that the presence of the double wheels does not represent a particularly relevant element, although they contribute to reduce the physical effort of the guides, ensuring some lateral balance of the device.

Patented double-wheel kit. 19
Instead the pivoting rear wheel (Figure 4) is an accessory that can be used when the passenger needs to be moved on relatively flat terrains with less relief. The functional element of this double-wheel solution is represented by the presence of the pantograph which is a patented trim correction system that enables to reduce obstacles like holes, bumps, roots, and slight cross-slopes as declared in Ferriol and Odin. 19
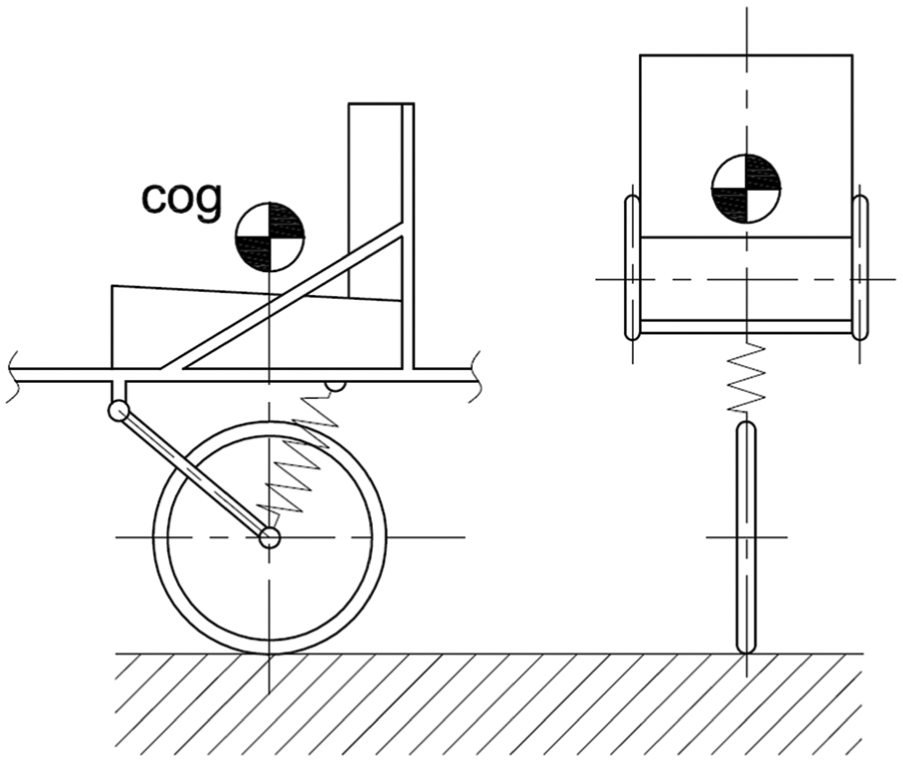
Also, it can be noticed that this four-bar tilting axle (Figure 4) is roll-opposed by a pair of gas springs. Nevertheless, the vertical suspension of the frame and the passenger is still obtained through a single trailing-arm suspension (Figure 5), as in the single-wheel solution (Figure 3). Therefore, the introduction of the double-wheel seems to have only a substantial effect on the roll, considering moments acting in the (yz) plan (same orientation of the reference system of Figure 2(b)).

The Joëlette© double-wheel solution without gas springs: (a) schematization, (b) tilted model, (c) simplified model, and (d) equivalent model.
To better understand these concepts, it is necessary to define and study a simplified kinematic scheme of the device considering the presence or absence of the two gas springs.
If we analyze the double-wheel solution, starting from a scheme in which the gas springs are not applied (Figure 5(a)), the tilting axle is applied on the trailing arm of the suspension exactly as it is in the single-wheel Joëlette©. As is, this axle (Figure 5(b)) would not have a roll stiffness (torsion-resistant moment around the x axis), kinematically acting like the single-wheel model (Figure 5(c) and (d)) because its tilting movement is completely free.
This principle of rolling freedom is also applied to the front axles of farm tractors and to some earth moving machines (e.g. rear axle of a wheeled loader), of course, until the tilting reaches the mechanical safety stop. 21
Another interesting aspect, highlighted during the analysis of this solution obtained with the rigid tilting axle or with an equivalent quadrilateral, is represented by the behavior of the device in case of the presence of an asymmetric obstacle that affects only one of the two wheels (Figure 5(b)). This condition involves only one upward displacement of the vehicle’s body, equivalent to half the height of the obstacle, and most importantly, it does not generate a rolling movement induced in the vehicle’s body (Figure 5(b)).
However, even with this double-wheel solution, the vehicle is unstable around the x axis, and the balancing moment must still be provided by the guides, so even in this case, the device’s behavior is similar to the single-wheel solution.
An improvement of this condition is obtained by the introduction of the two gas springs, as evidenced in the patent. 19 This pair of stabilizing gas springs was placed between the four-bar tilting axle and the suspension’s trailing arm (one on each side, Figure 6(a)). As a result, this configuration, in the presence of an asymmetric obstacle (Figure 6(b)), generates a differentiated compression of the two springs which in turn generates a resulting moment around the x axis. Similarly, this kind of resulting moment may be generated when there is a roll of the vehicle around the x axis.
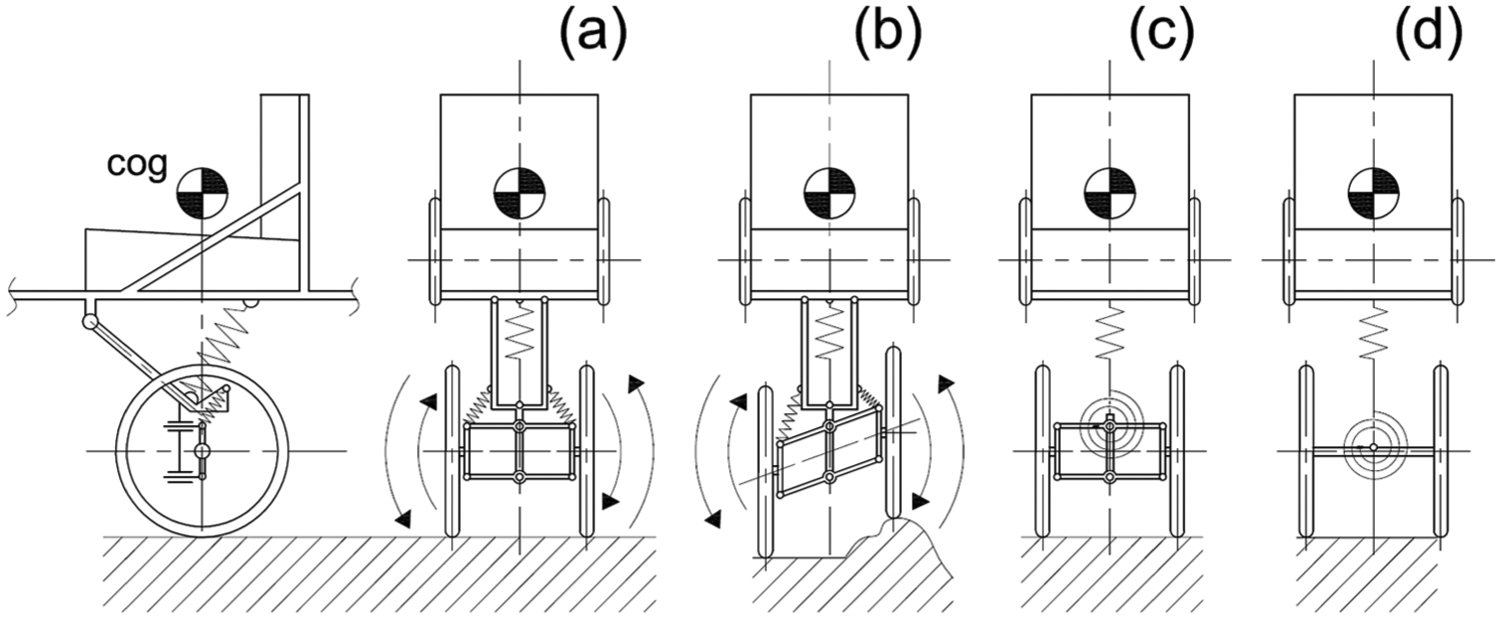
The Joëlette© double-wheel solution with gas springs: (a) schematization, (b) tilted model, (c) simplified model, and (d) equivalent model.
Therefore, with the introduction of the springs, the vehicle presents rolling stiffness. This condition can be further represented in a couple of simplified kinematic schemes (Figure 6(c) and (d)). In the schemes, spiral spring applied to the axle is the equivalent of the couple of gas springs.
In this configuration, considering the schematized equivalent spring (Figure 6(c) and (d)) and depending on the stiffness of gas springs, the device may return to vertical equilibrium even without the assistance of the accompanying guides, when its position is disturbed by some external factors.
However, it can be easily noticed that the need of comfort of the passenger, associated with the difficulty of overcoming an asymmetric obstacle, requires a low rolling stiffness (little rotary movement induced on the vehicle and on the passenger), while keeping the stability around the x axis, without (or with minimal) intervention of the accompanying guides, requires a good value of the same stiffness.
It is therefore necessary to make a compromise choice on this parameter: its effective value will be chosen according to the type of terrain and the preferences of accompanying persons. For example, if the path lies on a heavily rugged terrain, the solution with little or no rolling stiffness would be preferred, with the presence of the guides for maintaining the rolling balance of the vehicle. Conversely, when the terrain is less rough (dirt road, bicycle, or mule track), a solution with greater roll stiffness will be preferred to relieve the guides from the effort to maintain the balance of the device.
Study and definition of the new device configuration
In parallel with the limitations found from the critical analysis of the commercially available solutions, some observations have been collected by means of different mountain tourism associations that offer activities with this kind of devices.17,18 As a result, the criteria to be considered in the design of the new trekking wheelchair were defined. Main considerations on these aspects are summarized in the following paragraphs.
Design criteria for the new solution
As previously mentioned in the “Introduction” section, two main aspects were taken into account for the definition of the design criteria: the reduction of the physical effort of the accompanying persons and the improvement of the seating comfort for the passengers.
Since a considerable percentage of the use of these types of device occurs on easy or moderately rough terrains, it should be helpful to reduce the fatigue of the guides during these types of excursions. This way, it would be appropriate to design a device that could be guided and pushed/pulled without the need for a great physical effort and preparation of the accompanying persons (such as relatives or parents). In such conditions, it would be appropriate to design a device that presents an intrinsic stability in the pitch and roll planes introducing a three-wheel configuration instead of the single-wheel configuration. Furthermore, this improvement in stability would allow frequent stops without the need to use additional elements (e.g. support feet). Also, a particular attention in improving the passenger’s comfort can also be applied introducing a suspension system, thus considering the possibility of using the same device for people of different sizes, without the need to create devices of different sizes. Finally, the development of a more user-friendly configuration of the device will also improve its use in mountain or hillside touristic structures as well as in natural parks.
In addition, in order to evaluate a widening of use of this new vehicle in respect to the current solutions, a performance analysis has been conducted. This way, nine types of terrain were hypothesized according to which the different types of chairs were evaluated. The terrains considered (sorted by the more demanding ones) were hard off-road, single path, light off-road, mountain gravel road, gravel roads, grasslands, meadows, country bicycle lane, and country road. The four models of trekking wheelchair considered were the classic Joëlette©, the TWIN Joëlette©, the TWIN Joëlette© without roll stiffness, and the new concept Gölem wheelchair. Results of this evaluation were plotted in a radar chart (Figure 7). It represents the performance distribution of the considered chairs in function of terrains (along the radii) giving an idea of their different application fields obtained considering the previous design criteria. Ratings were obtained by assigning a score from 1 to 5 for each of the nine terrains with respect to each chair model. Scores were attributed based on the optimization/comfort level offered by the specific chair model with respect to the type of terrain and in function of the collected observations or by a reasonable estimation based on authors’ experience.
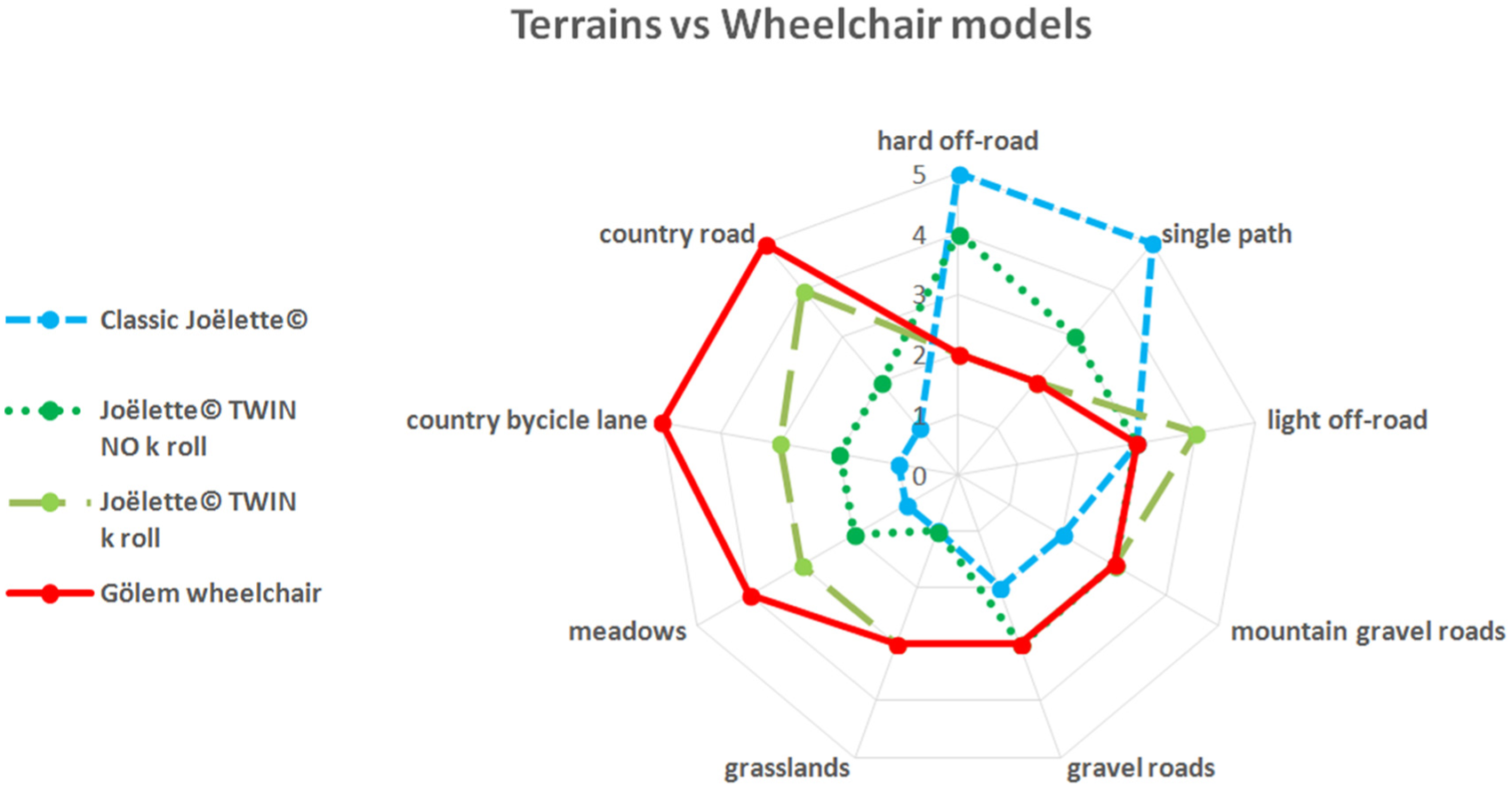
Radar chart: Terrains versus wheelchair models.
Thus, for each of the four chairs, its own field of application has been plotted as shown in Figure 7. Consequently, the Classic Joëlette© version provides the most suitable chair for use on heavy and off-road terrain even if its real use is mainly reduced, considering the previous highlighted limitations, while its TWIN version, with or without roll stiffness (caused by the introduction of gas spring), represents a more universal and balanced vehicle, and therefore, its field of application refers to less demanding terrains.
However, the new Gölem wheelchair (represented by the continuous red line in Figure 7), thanks to the introduction of the three-wheel configuration, and of the suspension system, will be characterized by a use on less demanding terrain, while maintaining excellent versatility reduced only in case of most extreme paths. This way, the new proposed solution does not overlap or even replace the existing ones, but it optimizes their performance in relation to the physical effort spent by the guides and the comfort of the passengers.
Additionally, the new device configuration extends its application field to new scenarios, outside the exclusive use for mountain trekking, such as for tourist activities carried out in archaeological or historical/cultural sites.
Gölem wheelchair features’ characterization
As a result of the previous analysis phase, features’ characterization and technical specifications of the new Gölem wheelchair have been issued. They can be translated into three main goals: introduction of rolling and pitch stiffness, improvement of the suspension system, and insertion of a steering system.
Introduction of roll and pitch stiffness features
To obtain a certain rolling stiffness, at least two wheels (two points on the ground) are needed considering the front wheelchair view and at least two wheels are also needed considering the side view of the wheelchair to introduce the desired pitch stiffness.
This way, the new Gölem device must be equipped with three wheels of the same size (and if possible of the maximum available size), to maintain the system isostatic and to allow the correct terrain contact and load support. Consequently, the choice of the correct position of the wheel has to be studied.
In particular, since the roll stiffness (kΦ) represents a qualifying parameter for the new device (see Figure 8), it is possible to identify that parameter kΦ as in equation (1) 22

where s is the transversal distance between the equivalent spring suspensions and ks is the single spring stiffness.

(a) Schematization of Gölem wheelchair roll stiffness and (b) Equivalent model emphasized roll stiffness.
Improvement and definition of the suspension system
Due to the introduction of the three wheels, the position of the device’s COG should be optimized in function of the chosen position of the wheels (distances L1 and L2) in Figure 9. Similarly, the vertical stiffness of the suspensions needs some adjustment once defined the COG position. In Gillespie, 22 the relationship between the suspension reactions causes comfort/discomfort for the passenger, while the effect on the accompanying guides (who have to oppose the frame movement with their physical effort) is not yet investigated; authors consider interesting the insertion of a second suspension under the passenger’s seat (Figure 9).

Schematization of Gölem wheelchair suspension system.
Also, the introduction of this additional variable will allow to investigate, during the next test phase of the Gölem’s prototype, possible decoupling of the eigenfrequencies of the suspended masses (Figure 9). In fact, it is essential to define a suspension system with adjustable elastic and damping elements.
Since passenger comfort is an important characteristic, the suspension system has been designed in order to have a kinematically progressive behavior with the purpose of having, with the same maximum force (corresponding to the limit hard stops), a lower static stiffness.
Therefore, the scheme of the proposed suspension system is represented in Figure 10.

Schematization of rear and front Gölem wheelchair suspensions.
This scheme corresponds to a motion ratio equal to two for the rear suspension and a motion ratio equal to three for the front suspension at the operating point. This difference between rear and front suspensions is necessary although the total weight is equally divided between the rear and front axle, and in this configuration, there are two front wheels and not one. Consequently, the expected stroke of the front wheels is 100 mm, while for the rear wheel it is 80 mm. Thus, the characteristic parameter for the suspensions is represented by its static drop (sag) which in the new concept design has a base value of 12 mm.23,24 The elastic behavior of suspensions has been carried out using a progressive geometry dimensioning similar to the one described in Sequenzia et al. 25
However, detailed explanation of the choice and determination of these suspension parameters and their calibration, in particular the working pressure of the air springs in relation to the weight of the carried person, is not considered in this article and will be presented in a future publication.
Introduction of a steering system
Since the proposed new model considers the presence of two axles, one front and one rear, it is also necessary to provide a steering system.
It is therefore preferable to equip the single-wheel axle of this system in order to avoid the presence of steering kinematics.
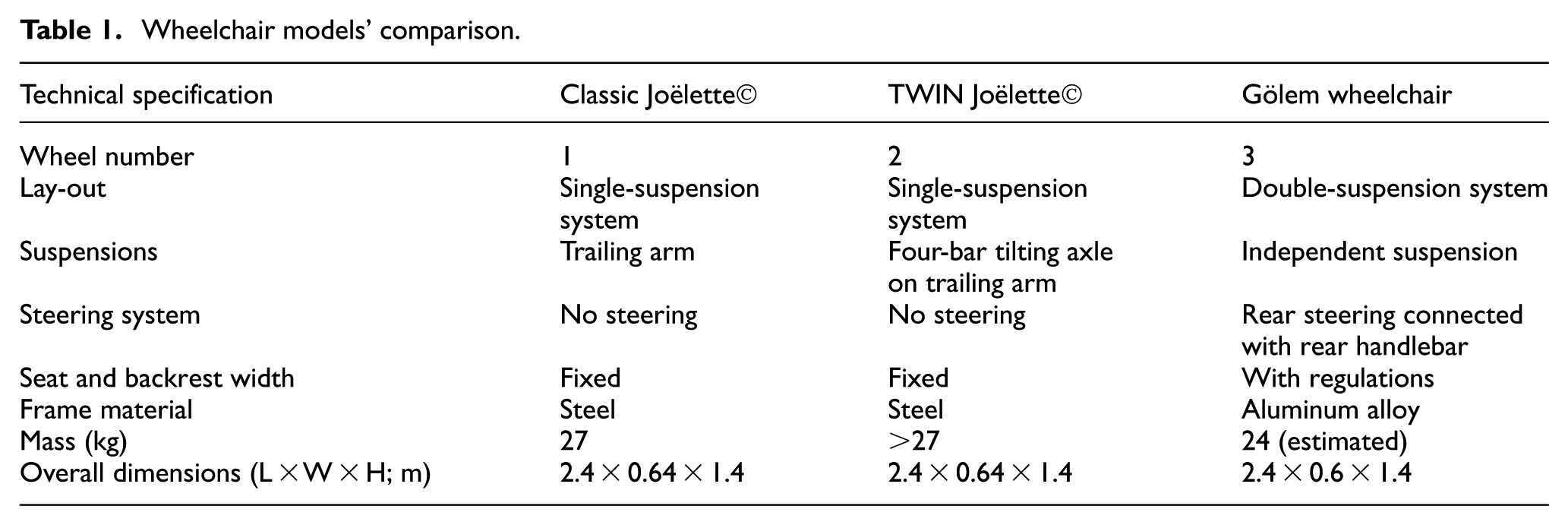
Finally, to clarify the comprehension of the choices made during the concept design phase, the different technical specifications compared to the reference model of the classic Joëlette© are summarized in Table 1.
Wheelchair models’ comparison.
Detailed design and three-dimensional computer-aided design modeling of the Gölem wheelchair
This section describes the preliminary results achieved by the first phases of the Gölem project. After the definition of the main technical features of the new concept wheelchair, the detailed design phase has been developed through the use of three-dimensional (3D) computer-aided design (CAD) tools.
Whenever possible, tubular structures have been used to design the new model following as much as possible techniques used in the bicycle manufacturing. At the same time, the logic of minimizing the need for special machining to deliver a project that may be ready for a small series production was pursued. 26 This way, the first step was the design of the mechanics of the suspension; as around them, the rest of the project has been developed.
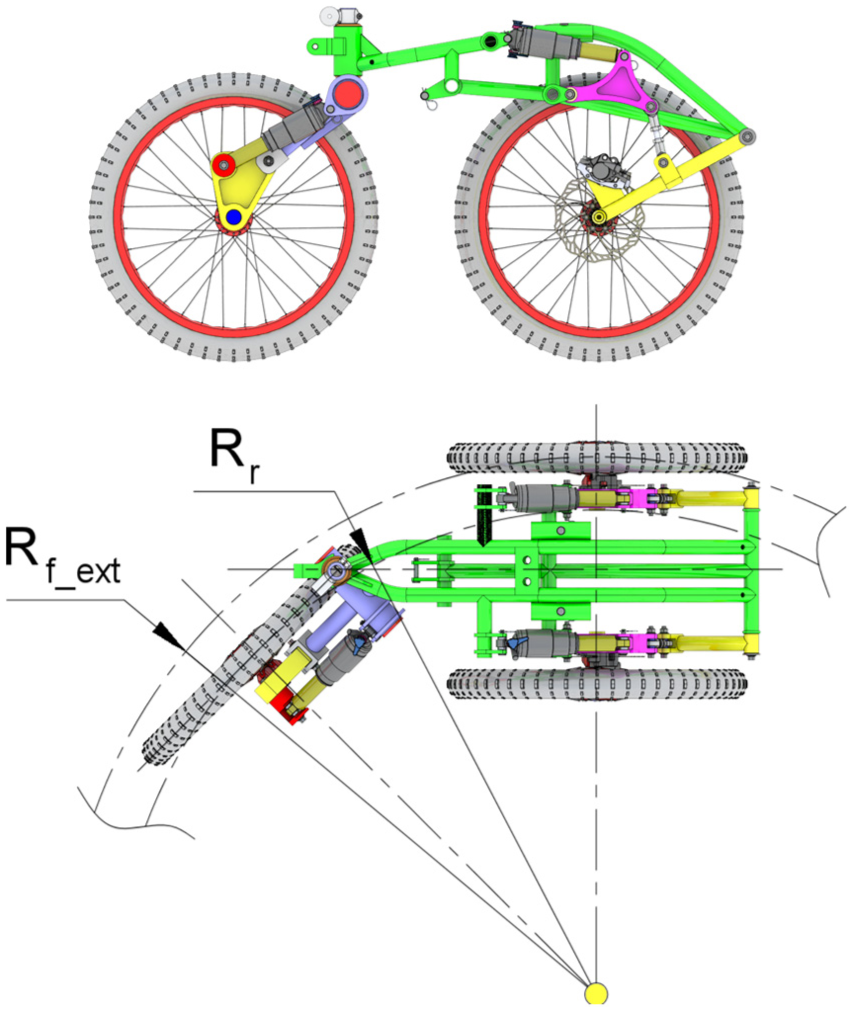
Since the wheelchair is equipped with three wheels, it is necessary to use a steering axle in order to make a steering. Thus, to avoid unnecessary complications, it has been chosen to put the steering on the axle with one wheel. In general, steering on the rear axle is considered not dangerous for low-speed vehicles, where it actually carries a beneficial reduction of the front wheels’ curve radius 22 (Figure 11), and consequently reducing the maneuvering space. In our case, authors opted for an articulated steering type. This solution, typical of certain categories of special vehicles (as wheel loaders, tractor with isodiametric wheels), consists of a hinged joint between two semi-frames. This way their articulation allows the making of a steering angle (Figure 11).
3D model of Gölem wheelchair frame and suspensions.
In particular, the rear suspension is pivoted at the hinge by the means of bushings to the front semi-frame. The proposed steering system is characterized by the possibility of alternately adopting an active or a passive steering mode (Figure 12).

(a) Active steering mode and (b) passive steering mode.
In the active steering mode, the handlebar is mounted united to the rear semi-frame. The steering angle is then defined by the guide (driver) placed on the rear of the wheelchair by rotating its own handlebar by ±60° (Figure 12(a)). While in the passive steering mode, the rear handlebar is attached to another link and united to the front frame. In this case, the rear wheel is free to pivot (by means of the castor) similar to a wheel of a trolley. Also, in this case, the possible angle is about of ±60° (Figure 12(b)). The switch of the two modes is obtained in a simple way and in few minutes by a single-screw operation and repositioning.
This option of choice can be very useful and appreciated by the guides, depending on the type of terrain hiked and on their personal level of enjoyment.
As previously mentioned, the main suspension system has been designed to ensure a couple of eigenfrequencies, perceived by the passenger, in the human comfort range. 24 The calculated values, based on the geometries and on the basic load values of the gas springs, are about 1.5 and 1.8 Hz (assuming there is no further suspension for the passenger).
Then, in the base configuration, the bump and pitch motions result coupled. However, this basic values can be modified by acting on the pressures of the spring-shock absorbers. In order to offer greater comfort to the passengers, also the seat has been provided by its own suspension. The chosen suspension is a trailing arm with a front hinge made up of a rubber-metal bushing. The advantage to use this type of suspension is in the decoupling of its own frequency from those of the main device system.
The designed backrest can be adjusted in three positions: at 90°, 105°, and 120° with respect to the seating surface. Even the plane of the seat can be adjusted in the range between +4° and +7°. This may allow a better accommodation of the passenger.
The new wheelchair is designed (Figure 13) to be used by a disabled with a weight range of between 20 and 100 kg. Overall, the estimated weight of the entire device is 24 kg, in line with the current classic Joëlette© model. Given the chosen layout for the chair, with the presence of a seat not fixed on the frame, may allow possible test with alternative seat models (like shell seats and so on) or configurations.

3D model of Gölem wheelchair.
Conclusion and future development
This work presented the preliminary results of the Gölem project. The design and development of a new wheelchair model for accompanying disabled people based on the analysis and improvement of the commercially available solutions taking into account the comfort of passengers and the better functionality of the device is concerned. With regard to its field of application, the new device is intended to optimize technical performances in relation to the physical effort spent by the guides and to the comfort of the passengers. In fact, it is characterized by the possibility of use on less demanding terrain, maintaining excellent versatility limited only by the most extreme paths. These considerations therefore open new scenarios extending the application field of the Gölem wheelchair outside the mountain trails, for example, for activities carried out in archaeological or historical/cultural sites.
Focusing on the new configuration, the Gölem wheelchair has been designed to optimize its lateral balance and to improve the ease of driving/maneuvering by the guides and the passenger comfort. In fact, the new model envisages the use of three isodiametric wheels with independent suspensions and a double suspension system reaching a system’s own frequency close to 1.8 Hz. In addition, the introduction of a steering system has contributed to further improving the maneuverability of the device. At present, the prototype of Gölem wheelchair is under construction. Future activities will require a validation phase to verify the previously defined dynamic parameters and to test the prototype with real users. For example, some tests that are expected to be carried out are related to the acquisition and evaluation of the vibrations actually transmitted to the passenger seat through the new suspension system and the assessment of the oxygen consumption of guides to consider their physical effort even in comparison to similar tests carried out using the commercially available solutions.
Footnotes
Acknowledgements
The authors would like to thank Stefano Musicco, Diego Pasotti, and Matteo Robba for the support in the technical drawing development.
Handling Editor: Tadeusz Mikolajczyk
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work is part of BrAL-BrixiaAccessibilityLab’s activities and was funded by the Department of Mechanical and Industrial Engineering, University of Brescia, Brescia, Italy.