
Abstract
This study presents a solution to the problem of containment control of multiple fully actuated autonomous surface vehicles subject to environmental disturbances. Using finite-time stability theory, a nonlinear disturbance observer is constructed to provide an estimation of unknown disturbances online. By employing nonlinear disturbance observer to compensate disturbances, a robust containment controller is constructed by combining backstepping technique and dynamic surface control technique. It is proved that the proposed containment control scheme can force all the followers to move into the convex hull spanned by the leaders and guarantee that all the signals in the closed-loop system are globally uniformly ultimately bounded. Finally, four simulation examples are provided to demonstrate the effectiveness of the containment controller and its robustness to external disturbances.
Introduction
In the past few years, the field of the cooperative control for multiple autonomous surface vehicles (ASVs) is of increasing interest to the motion control community. This is due to the fact that a group of ships can be used to complete a specific task, where it contributes greater robustness, lower cost, and better performance. Some typical applications include environmental monitoring, rescue, and reconnaissance operations.1–5 To achieve these objectives, an increasing number of studies have focused on the cooperative control of a group of ASVs.
Recently, the cooperative control problem of multiple ASVs has been studied by many researches. For instance, a design is presented for distributed maneuvering of multiple ASVs with the aid of neurodynamic optimization and fuzzy approximation in Peng et al. 6 The authors in the study of Fahimi 7 design a nonlinear model predictive formation control (NMPFC) law based on an underactuated model to stabilize the relative distances and orientations between the follower and the leader; in the study of Kyrkjebø et al., 8 a leader–follower (L-F) synchronization output feedback controller has been proposed for the ship replenishment problem using an nonlinear observer; in the study of Dong, 9 continuous time-varying cooperative control laws are designed to perform a geometric pattern using suitable transformations while assuming that the yaw velocity is nonzero; to cope with the uncertainties of the ASV model, a robust adaptive formation control law is developed that combines neural network (NN) with dynamic surface control (DSC) technique in the study of Peng et al.; 2 in the study of Shojaei, 3 a L-F formation tracking controller has been proposed to force a group of ASVs to maintain the desired orientations and positions relative to one leading ship, considering the input saturation; in the study of Peng et al., 10 a robust cooperative control method has also been applied to form a desired geometric pattern with the aid of NN, backstepping (BP) method, and graph theory. A common trait in these designs is that only one leader exists in the group.
In practical applications, there might exist multiple leaders in the group, which can be called as the containment control problem. 11 In this case, the control objective is containment of the followers in the convex hull of the leaders’ positions.12,13 In the marine domain, a group of ASVs are guided by another group, and some ASVs are regarded as leaders, which are all equipped with sensors to detect the hazardous obstacles in the marine environment. 14 The dynamics considered in recent works correspond to single integrator systems, 15 double integrator systems, 16 strict-feedback form systems, 11 general linear dynamics, 17 and Lagrange dynamics. 18 However, these proposed methods do not consider environment disturbance, which might affect the control performance. To cope with the uncertainties of the model, a neurodynamics-based output feedback scheme has been proposed for containment maneuvering of ASVs guided by multiple parameterized paths in Peng et al. 13 Accordingly, how to achieve the containment control of fully actuated ASVs in the presence of ocean external disturbances needs to be investigated further.
The control method based on nonlinear disturbance observer (NDO) can enhance system disturbance rejection and improve system robustness. At present, NDO is widely used in robotic manipulator, 19 missile, 20 active suspension system, 21 ASV, 22 and other fields. The design and analysis of traditional disturbance observer (DO) are based on linearized model or linear system theory. 19 However, the model (such as ship) has a strong coupling nonlinearity, so the design of DO through linear system theory is inaccurate. Therefore, the authors in the study of Chen et al. 19 assume that disturbance time-varying rate is lower than the dynamic characteristics of DO and design the DO that could be applied to nonlinear model, where estimation error has exponential convergence properties. In the study of Kim, 23 an NDO has been developed using the feature that fuzzy logic system could arbitrarily approach a strong nonlinear function. The authors in Zhu et al. 24 design a radial basic function NN DO, which has an excellent approximation ability to monitor the uncertainties. By assuming that the upper bound of the disturbance change rate is known, an NDO is proposed which could make disturbance estimation error to converge to a small neighborhood of the equilibrium point exponentially in the study of Do. 22 The NDO proposed by the above literatures had common drawback, namely, convergence speed of estimate error is low and only asymptotic convergence can be obtained.
In recent years, BP method, as an effective method of nonlinear control has become a research hotspot, and it, together with dynamic sliding mode, 25 the cascade system theory, 26 and other methods, is applied in motion control of ship. BP method, however, involves the repeated derivatives of the virtual control signals in the design process, and the problem of “explosion of complexity”27,28 in it increases the complexity of the control law. To overcome this drawback, the authors in the study of Swaroop et al. 27 propose DSC technology, which can approximately estimate the first-order derivative of the virtual control law and reduce the complexity of control system.29,30
Motivated by the above observations, this article considers the robust containment control problem of multiple fully actuated ASVs subject to unknown external disturbances. Compared with the existing results, the main features of this article can be summarized as follows:
In contract to the cooperative controllers proposed in the study of Peng et al., 2 Shojaei, 3 Fahimi, 7 Kyrkjebø et al., 8 Dong, 9 and Peng et al., 10 where there exist a single leader in the group, this article considers the containment control problem of ships in the presence of multiple virtual leaders.
In contract to the traditional NDO,19,23,24 a new NDO, with the aid of finite-time stability, is proposed. The NDO designed in this note is employed to estimate the unknown disturbances, which can quickly approach unknown disturbances within finite time.
For the first time, the NDO-based DSC technique is employed to solve the containment control problem of multiple fully actuated ASVs with unknown disturbances, which leads to a simpler control law than traditional BP-based design.
This article is organized as follows: section “Problem statement and preliminaries” introduces some preliminaries and formally states containment control problem. In section “Control design,” we will present our main result, which will be illustrated by a series of simulation experiments in section “Simulations.” Finally, we will close this article in section “Conclusion” with some concluding remarks.
Problem statement and preliminaries
Notations
λmax(
Concepts in graph theory
Suppose that a group of ASVs interacts with each other through a communication network. It is natural to model the communication topology among these ASV using results from graph theory. In this article, we assume that the individual ASV as a node, and the information interaction for ASVs can be represented by a directed graph G = {V, ε}, where V = {a1, a2, …, an} denotes a set of nodes and ε = {(ni, nj) ∈ V × V} denotes a set of edges with element (ni, nj), which implies that node nj can receive information from node ni. Here, we say that node ni is a neighbor of node nj, and the notation Ni is represented as the set of all neighbors of node i. Let the adjacency matrix

Definition 1
For a group of ASVs, ship i is said to be a leader if aij = 0, and ASV i is said to be a follower if aij = 1, j = 1, 2, …, N.
Definition 2
The real set C ∈

where
Ship modeling
Consider a group consisting of M followers, labeled as ASV 1 to M. In the horizontal plane, the 3-degree-of-freedom (DOF) ASV model can be formulated as 1


where

the vector
Then, suppose that there exist N-M virtual leaders in the group, labeled as ASV M + 1 to N. The trajectories of the virtual leaders are denoted

To achieve the control objective, the following assumptions is imposed.
Assumption 1
For the time-varying disturbances dui, dvi, and dri, there exist positive constants

Assumption 2
For all t > 0, there exist constants N1 and N2 such that
Assumption 3
For every follower of the group, there exists at least one leader that has a directed path to it. 31
Remark 1
Assumption 2 guarantees that the desired trajectories of the virtual leaders
Problem statement
This control objective is to design a containment control scheme such that all the followers in the group move into the convex hull formed by the leaders,18,32 that is

where

Lemma 1
Under Assumption 3, all the eigenvalues of
Remark 2
Let
In this article, our control objective is formally stated as follows.
Control objective
Consider the fully actuated ASV model given by equations (2) and (3) under Assumptions 1–3; the objective of this work is to design a robust cooperative controller for each ship on the basis of its local states and the information from neighbors and a portion of the leaders and such that

where σi is a positive constant,

where
Concepts of finite-time stability
Consider the following system

where f:
Definition 3
The zero solution of system (11) is locally finite-time stable (LFTS) if it is Lyapunov stable and finite-time convergent in a neighborhood
Control design
In this section, a robust containment control is proposed for the fully actuated ASVs with unknown external disturbances taken into account. The block diagram of the robust controller described is provided in Figure 1. The detailed design procedure will be given in the following section.

Block diagram of the containment control system.
NDO design
The external disturbances from ocean may affect performance of control system and even make system unstable. Therefore, a new NDO is designed to estimate the external disturbances, and its estimation is fedback to control law. Thus, the real-time compensation of disturbances is realized.
Before designing the NDO, we shall recall the following lemma:
Lemma 2
Consider the system defined in Definition 3. Suppose that there is a continuous function V(x):
V(0) = 0 and V(x) is positive definite on
There exist real numbers c > 0, l > 0, and

Then, system (11) is LFTS, and the settling time can be estimated by

If
At first, we define the auxiliary variable

The time derivative of

where
From equation (15), we have the disturbance estimation

Then, the main result can be summarized as Theorem 1:
Theorem 1
Consider the ASV model equations (2) and (3) in the presence of bounded disturbances
Proof
Consider the following Lyapunov function (LF)

whose derivative is

According to equations (3) and (15), we calculate the derivative of V0 as follows

where D1min = min{D11, D12, D13} > 0, D2min = min{D21, D22, D23} > 0. By Lemma 2, it can be concluded that the observer error
By substituting equation (16) into equation (14) can be rewritten as

Clearly, using the finite-time convergent observer equations (14)–(16), the observer
Remark 3
NDO proposed by Chen et al.
19
guarantees that disturbance estimation converges to disturbance with exponential rate, but disturbance must be slowly time-varying (i.e.
Remark 4
Because
Controller design
In this section, the output of NDO can be viewed as a compensated signal. Thus, the actual control input

where
By substituting equation (21) into equations (2) and (3), we have


Then, we design a robust containment control law for the ship combining the NDO equations (14)–(16) and DSC technique. The whole controller design procedure contains two steps as follows:
Step 1. Kinematic loop design
Define the first dynamic surface error

where aij is defined in section “Concepts in graph theory.”
Differentiating both sides of equation (24) along equation (22) results in
where

Consider the first LF

whose derivative is

where
To make
where
By substituting equation (28) into equation (27) yields

Before the next step, DSC technique can be applied here to solve the problem “explosion of complexity,” which occurs in a strict-feedback form system. Let

where
To make the presentation clearer, the following notations are used

To prepare for the subsequent control design, the following lemma is presented.
Lemma 3
Consider the kinematic model described by equation (22) canceling the terms
The control objective (equation (9)) is achieved;
There exist positive constants ρ1i and ρ2i, such that
Proof
By substituting equation (28) into equation (22), canceling the nonlinear term

Then, one obtains

Hence, defining

where
Multiplying both sides of equation (34) with

According to equations (31) and (35), we have

By the use of triangle inequality, one obtains the upper bounds of the virtual control


where ρ1i, ρ2i are positive constants.
Step 2: dynamic loop design
Define the second dynamic surface error

Differentiating equation (39) along equation (23) yields

To stabilize

where
Stability analysis
Define following the FOF estimated error

Substituting equation (28) into equation (42) yields

The time derivative

With equations (24), (28), (39), and (41), we have

Then, by recalling equations (39) and (41), one obtains

From equations (14), (15), and (22), we have

Based on the control law design, the main result of this note can be summarized as the following theorem.
Theorem 2
Consider the follower model equations (2) and (3) with unknown external disturbances. If the proposed containment control system satisfies Assumptions 1–3, the NDO are chosen as equations (14)–(16). Then, the actual control inputs (equation (21)) guaranty that all the followers in the group move into the convex hull formed by the leaders, and all the signals of multiple ASVs in the closed-loop system are semi-global uniformly ultimately bounded (SGUUB) by appropriately choosing the design parameter
Proof
Consider the following LF

In terms of equations (44)–(47), the time derivative of V2 is

From equations (44)–(47) and the Young equality

Substituting equation (50) into equation (49) yields

where

Using Lemma 3,

From equation (51), it follows that
Let

And then, equation (53) can be written as

where
By integration of the inequality (equation (55)), it leads to

Noting that

that is,

where

which means that the control objective (equation (9)) is achieved.
Remark 5
Since the auxiliary variable estimated error
Remark 6
In kinematic loop design, the derivatives of the virtual control law

To simply this computation, FOF is introduced to estimate each virtual control law and its derivative.
Remark 7
In recent years, many papers have discussed the problem of containment and consensus maneuvering of fully actuated ASVs under external disturbances. In Peng et al., 13 an echo state network (ESN)-based observer using recorded input–output data is developed to identify unknown vessel dynamics. In Peng et al., 14 iterative updating laws using prediction errors are employed to identify the unknown dynamics of ASVs. However, the above two methods can only asymptotically approach to unknown disturbance. Different from the study of Peng et al.,13,14 this article utilizes the finite-time stability theory to design a NDO with finite-time convergence.
Simulations
In this section, simulation studies are presented to validate the effectiveness of the proposed robust cooperative scheme to bounded environmental disturbances. We consider a group of ships with three virtual leaders and five followers. The communication topology among the ASVs is shown in Figure 2 with F = {1, 2, …, 5}, L = {5, 6, 7}. The design parameters for the proposed containment controllers are chosen as
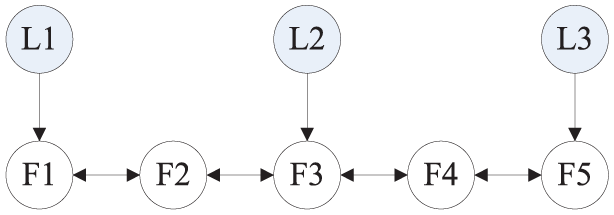
Communication topology.
Point stabilization with constant disturbances
In this section, the proposed containment control strategy in the presence of the constant disturbances is examined. Suppose that the positions of the virtual leaders are fixed point as shown in Figure 2. The disturbances due to ocean environment are set as
The results are shown in Figures 3 and 4. In Figure 3, the red points represent the virtual leaders’ actual positions, the black dotted area indicates the area that the followers need to reach, and the other five color dashed lines indicate the actual trajectories of the followers. From this figure, we find that all the followers in this group ultimately converge to the stationary convex hull formed by the stationary leaders, and the final trajectories of the followers are constant. The estimated errors of the DOs are displayed in Figure 4. It can be observed that the proposed NDO provides the rapidly convergent estimation of external disturbances as proved in Theorem 1.

Motion trace of the group.
Disturbance estimation errors.
Point stabilization with time-variant disturbances
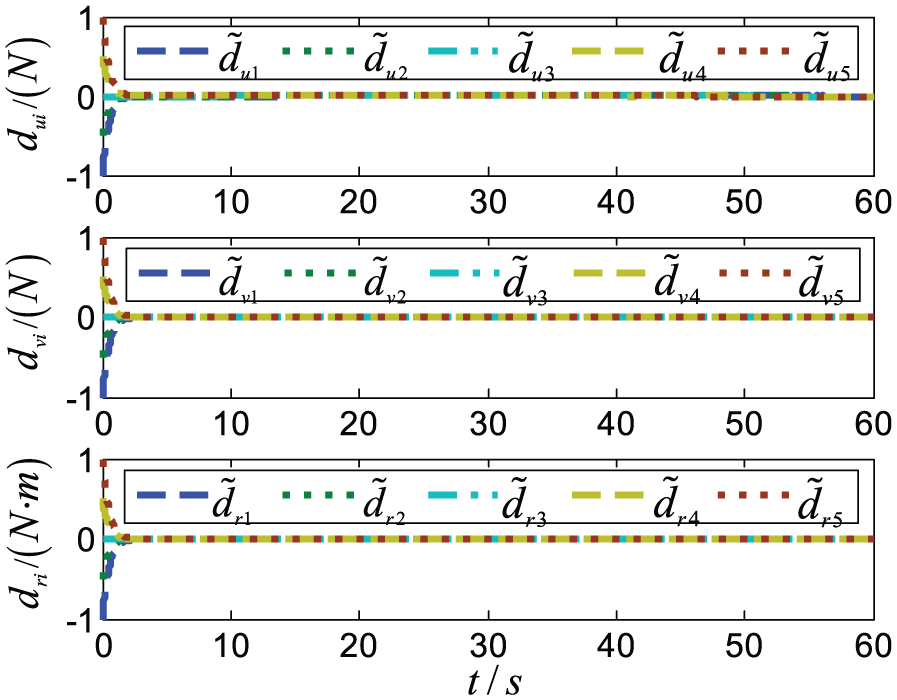
In this section, the proposed control strategy in the presence of the time-variant disturbances is also examined. The initial states of each follower are chosen as section “Point stabilization with constant disturbances.” The initial states of the DO are also taken as section “Point stabilization with constant disturbances.” The disturbances due to ocean environment are assumed to be

The results are shown in Figures 5 and 6. Figure 5 shows the output trajectories of the five followers, from which it is evident that the followers in this group also converge to the convex hull formed by those of the moving leaders. The estimated errors of the DOs are displayed in Figure 6. From these figures, one can conclude that the proposed containment control strategy is also practical when each follower is exposed to time-variant disturbances. It is obvious that the designed control law is effective when each ASV is exposed to both unknown constant and time-variant external disturbances.

Motion trace of the group.

Disturbance estimation errors.
Curve tracking with constant disturbances
In this section, we assume that the predefined trajectories of the virtual leaders for this group are curved trajectories. The initial follower states are

where i = 1, 3;
The results are shown in Figures 7 and 8. Similar with Figures 3 and 5, the red points indicate the leaders’ trajectories, the black dotted area represents the desired area of the leaders in the movement, while the other five color dotted lines indicate the actual trajectories of the followers. Figure 7 illustrates the motion traces of the five followers. As shown in Figure 7, the followers’ trajectories converge to the convex hull spanned by three leaders’ trajectories. The estimated errors of the NDOs are shown in Figure 8. It can be noted that the NDO provides the rapidly convergent estimation of external disturbances when the trajectories of the virtual leaders are curved trajectories.

Motion trace of the group.

Disturbance estimation errors.
Curve tracking with time-variant disturbances
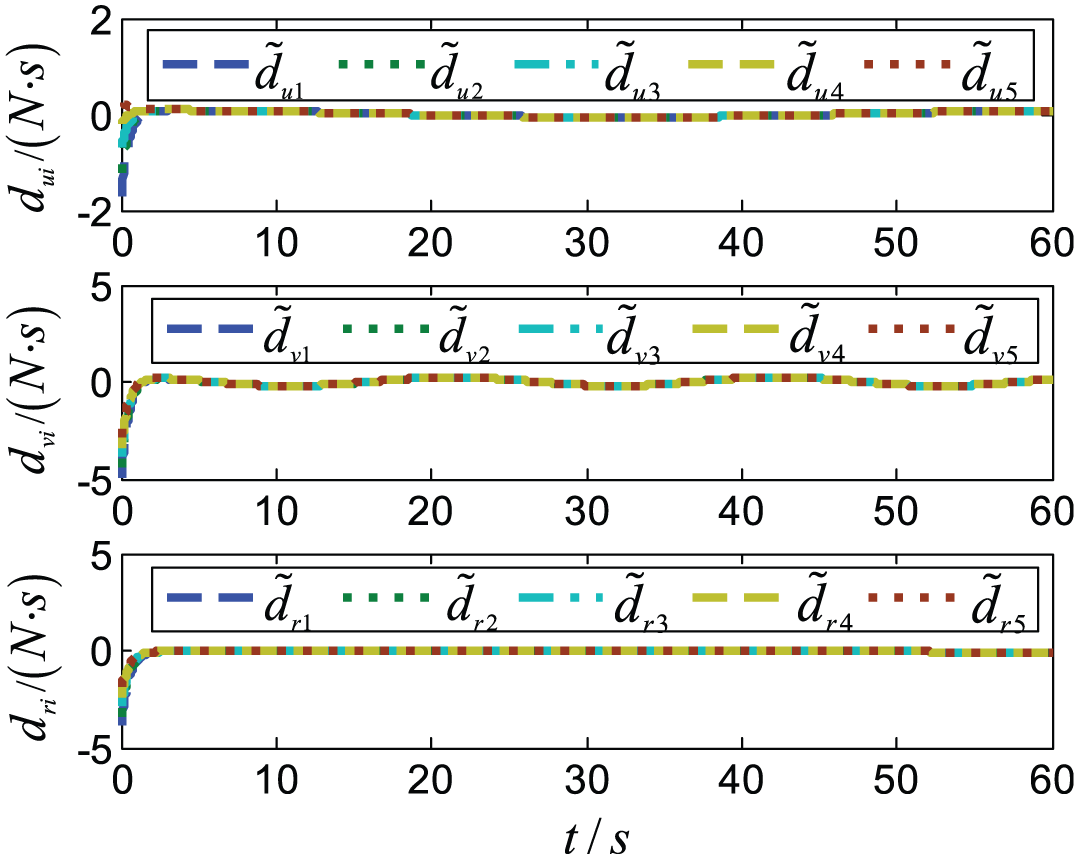
In this section, we consider the curve tracking problem of followers in presence of time-variant disturbances. The initial states of the followers and the curved predefined trajectories of the virtual leaders are the same as the previous section. The disturbances are assumed to be
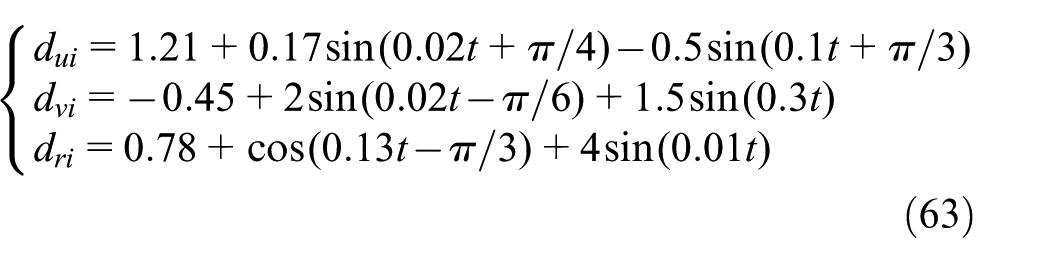
These simulation results are demonstrated in Figures 9 and 10. Figure 9 shows the output trajectories of the five followers, from which it is evident that the followers in this group also converge to the convex hull formed by those of the moving leaders. The estimated errors of the DOs are displayed in Figure 10.

Motion trace of the group.
Disturbance estimation errors.
In summary, from Figures 3–10, we can see that the proposed containment control law in this article provided acceptable results as proven in Theorem 2, and all the signals of multiple ships in the closed-loop system are SGUUB as time approaches infinity. In addition, the proposed NDO provides the rapidly convergent estimation of external disturbances as proved in Theorem 1.
Conclusion
This article presents an NDO-based DSC approach for containment control of multiple fully actuated ASVs in the presence of unknown external disturbances. Compared with existing results, the approach proposed in this article shows some advantages to handle the disturbances due to ocean environment and avoid the problem of “explosion of complexity” from the standard BP method. Based on Lyapunov stability theory, the proposed containment control law guarantees that all the signals of the closed-loop system are SGUUB. Simulation examples demonstrate the effectiveness of the containment controller and its robustness to external disturbances.
In the future, related works will be required to account for communication constraint among ships, such as switching communication topology as well as communication delays.
Footnotes
Acknowledgements
The authors gratefully acknowledge the helpful comments and suggestions of the reviewers, which have improved the presentation.
Academic Editor: Anand Thite
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work is partially supported by the National Natural Science Foundation of China (No. 51379044) and the Fundamental Research Funds for the Central Universities (No. HEUCFX41304).