
Abstract
This article demonstrates the tension distribution estimation method for the ring chain transmission system of scraper conveyer, which is based on multi-body dynamics theory and linear state observer. As designed, a multi-body dynamic model of ring chain transmission system is constructed using ADAMS dynamic design software, and a mathematical model solved by MATLAB functions is established and adopted to verify system performance of the dynamic model by comparing the simulation results. In practical terms, tension monitoring of ring chains is virtually unreasonable due to difficulties of direct measurement and restrictions of high-cost tension sensors during the process of mechanized coal mining. Besides, the change law of tension distribution of the ring chain transmission system has mainly been obtained via heuristic experience, coupled with simple calculations. The proposed estimation method makes it feasible to obtain all the contact forces of ring chains based on the measurable state variables. For research purpose, the state-space modeling allows the reconstruction of the tension observer and flexible application for numerical solutions based on Runge–Kutta equations. However, the high-dimensional tension observer has inherent drawbacks of heavy computational loads. In such cases, a novel dimension-minimized algorithm is proposed for high-order matrices solution, which makes the observer very attractive for applications in dimensionality reduction. Furthermore, the practicability of the proposed estimation method is verified with simulation evaluation and deviation analysis.
Keywords
Introduction
The ring chain transmission system (RCTS), which connects the driving devices and conveying system, has been extensively applied in metallurgy, aerospace, and other industries,1,2 especially in mechanical mining. The scraper conveyer (Figure 1) is a set of pivotal transport equipment whose vital subsystem is the RCTS and has been widely employed to transport coals and gangues 3 with the characteristics of long distance and heavy duty in the fully mechanized coal mining face. Accordingly, the coal production performance can be directly attributed to the reliability and efficiency of the RCTS.
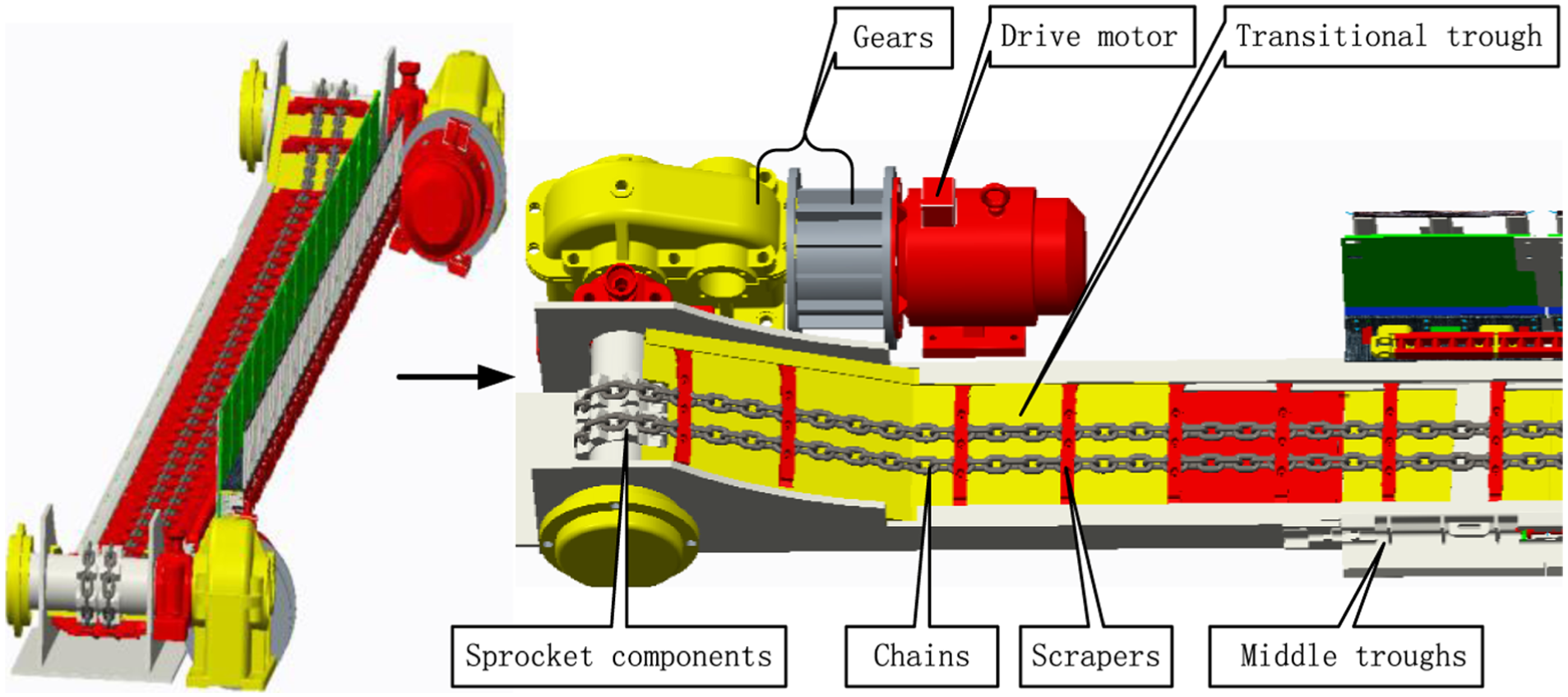
Schematic of scraper conveyor in coal mine.
Mainly consisted of the driving system, sprockets, scrapers, ring chains, and middle troughs, the RCTS is characterized by complex dynamic behavior and discrete nature dominated by a large number of contacting chains, which attracted a sprawl of attention to investigate the complex interactions between different components. In recent scientific literature, scholars have carried out relatively thorough research on contact force models of the RCTS.4–8 In addition, researches on dynamic modeling have been widely carried out to learn about characteristics of diverse transmission systems. Saghafi and Farshidianfar 9 designed an optimal gear transmission system to control and eliminate the chaotic behaviors using a nonlinear dynamic model. By discretizing the sprocket tooth profile into seven possible contact regions, Pereira et al. 10 presented a novel approach to deal with the modeling and dynamic analysis of planar chain drives. Zhang et al. 11 studied the 6-degree-of-freedom (DOF) dynamic modeling method of geared rotor system characterized by its complexity which comes mainly from the shafts by the mesh stiffness due to gear pairs and variable bearing coefficients of load power changing. Fuglede and Thomsen 12 proposed the kinematic and dynamic model with an approach to calculate the chain wrapping length, aiming at providing a framework for conducting and understanding both numerical and experimental investigations of roller chain drive dynamics. Xu et al. 13 constructed the virtual prototype model of the intermittent roller chain to simulate the dynamic response of the chain system; in addition, different motion laws and the influence from tension force were also considered in the simulation investigation.
Generally, the tension variation of ring chains can effectively reflect the working state of scraper conveyor. Applied in long distance transportation, the RCTS is composed of a large number of ring chains, which brings about great restriction for direct measurements of chain tension. As a result, tension monitoring of ring chains has not been considered in the latest research works, and most of the studies stop proceeding at the level of theoretical calculation.14–16 In recent years, with the increasing in concerns about parameter prognostic, the theory of state observer has been widely applied and studied in various fields. Ali et al. 17 proposed a novel hybrid fuzzy-sliding mode observer to estimate various parameters with a high rate of accuracy even with disturbances and noise in the model. Roux et al. 18 developed a nonlinear grinding mill observer model for estimation of the states and parameters. Xu and Chen 19 analyzed the degradation of lithium-ion batteries with the sequentially observed discharging profiles using the observation model based on a general state-space model. Liang et al. 20 described a disturbance observer-based force estimation method and predicted the contact force between the subject body and the environment in robotic and mechatronic systems.
In this article, a virtual prototype model of the RCTS is presented by multi-body dynamics simulation software ADAMS based on kinematics and dynamics, which serves as a dynamic model to study the incidence relations between the dynamic characteristics and the running states of the RCTS under normal working condition. For further study, a mathematical model of the RCTS is established based on mass-spring-damping modules and simulated with MATLAB package. Sequentially, a combination of virtual prototyping model and mathematical model is implemented to check the correctness of dynamic modeling method. To date, few researches related to tension distribution estimation of the RCTS have been undertaken in the literature. With available states derived from tension sensors as the inputs of the state observer, we propose the observer-based tension distribution estimation method, which could estimate the unmeasurable contact forces for the first time. To minimize the computational cost, the novel dimension-minimized algorithm shows great advantages in dealing with high-dimensional solution.
The article is organized as follows: section “Virtual prototype modeling of RCTS” presents the virtual prototype model of the actual RCTS. Section “Tension distribution estimation method” details the design of the tension distribution estimation method based on a linear state observer. Section “Estimation process and simulation results” describes the calculation process of the novel dimension-minimized algorithm and illustrates simulation results to evaluate the performance of the proposed tension distribution estimation method. Finally, followed by acknowledgments, we offer conclusions in the “Conclusion” section.
Virtual prototype modeling of RCTS
Basic theory of contact pairs
The RCTS works as a representative multi-body system (MBS) whose representation of contact mechanics is an eminently challenging task to model the complex contacting bodies. To perform our study, the polygonal contact model (PCM) 6 is adopted to deal with complex contact surfaces with satisfactory results and is equally applicable to the contact pairs of chains.
As a contact algorithm to solve contact problems, the polygonal contact model has two prominent features: on one hand, the surfaces of arbitrary body in a MBS can be described in the polygonal form, and the commonly used method for construction of polygonal surfaces is non-uniform rational B-splines (NURBS); on the other hand, the contact forces determination between any two bodies in a MBS is based on the elastic foundation model.
The research on classical multi-body dynamics has practical significance to raise efficiency of MBS simulations by the hypothesis that the elastic foundation model considered in the RCTS is treated as rigid bodies. Assuming that the equivalent rigid bodies are covered with thin elastic layers, as follows

where

Most applications cannot satisfy the assumption of thin layers, we can derive the layer stiffness from experiments or qualified estimating, and we can also apply the elastic foundation model

Besides, the elastic foundation model is built on the basis of contact path discretization. For contact element N of area

Generally, the establishment of contact pairs plays a crucial role in the process of dynamics simulation. As for the RCTS, a greater number of contacting bodies are included, such as sprockets, ring chains, scrapers, and middle troughs. Contact pairs consist of two bodies moving correspondingly to each other and are specially adopted to simulate the interactions among main contacting bodies. In this article, contact pairs are discussed between sprocket and plat chain, and between vertical chain and plat chain. Referring to the PCM theory, Figure 2 illustrates the surfaces discretization of the contact pairs using the NURBS.

Discretization of contacting surfaces: (a) contact pair between sprocket and plat chain and (b) contact pair between vertical chain and plat chain.
With efforts of discretization, quadrangular and pentagonal surfaces of the contacting bodies can be feasibly converted into two and three triangles, respectively.
6
Taking the inertial coordinate system I as the reference, local coordinate systems S, P, V, and q and point coordinate systems


The minimum distance between


where if
Dynamic modeling process
In this article, we establish the three-dimensional (3D) physical model of scraper conveyor using the creo2.0 software as shown in Figure 1, and the dimension of the chain is ϕ48 × 152. To study the interactions between main components of actual RCTS, a virtual prototyping model has been built. In addition, contact pairs are effectively used for dynamic modeling and computing, and polygonal contact theory is directly employed to detect contact pairs of the ring chain system via collision detection. 6
It could be obtained through model simplification that the dynamic model of the RCTS consists of one double-chain system, one transmission trough system, and one double-drive sprocket system, as shown in Figure 3. The double-chain system works as the left single chain subsystem and right single chain subsystem, both of which are composed of lots of plat chains, scrapers, and vertical chains. The transmission trough is treated as an independent entity through Boolean operations of transitional troughs and middle troughs. The kinematic restriction of two rigid bodies in contact includes two main aspects: kinematic constraints and contact force relations; the restriction of the system is shown in Figure 4.

Dynamic model of the actual RCTS.
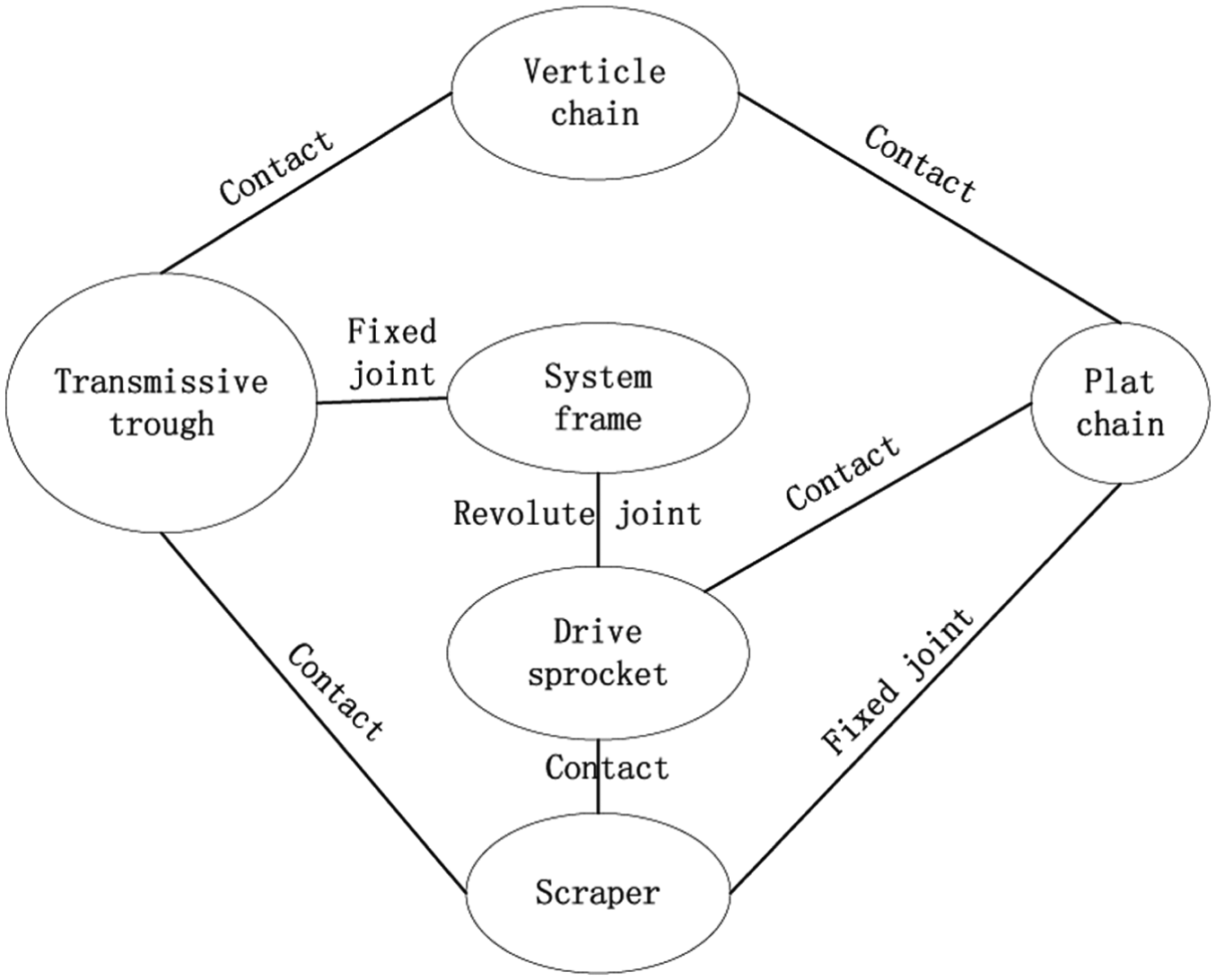
Restriction of the system.
Results analysis
In practical engineering, the double-drive transmission system is driven by electromotor in actual transmission system. Thus, we apply rotation motion on the revolute joints, which are built between drive sprocket and system frame, and the sprocket rotates in the counterclockwise direction. In order to ensure compliance with actual working conditions, we take the rotation angular velocities of the sprockets as the inputs of the RCTS. The left single chain subsystem and right single chain subsystem are similar in kinematic and dynamic behaviors, either of them works as a closed transmission chain system formed by linking the plate chains and the vertical chains together. In our work, we just consider contact forces between two adjacent chains of the left single chain subsystem under the effect of uniform loads.
Figure 5 shows the variation of the tension between plate chain and vertical chain running on middle troughs. After a smooth and steady startup process, drive sprockets rotate at a speed of 2.56 rad/s. Overall, the value of the contact force reaches a steady level from 1 to 4.1 s and presents irregular cyclical changes.
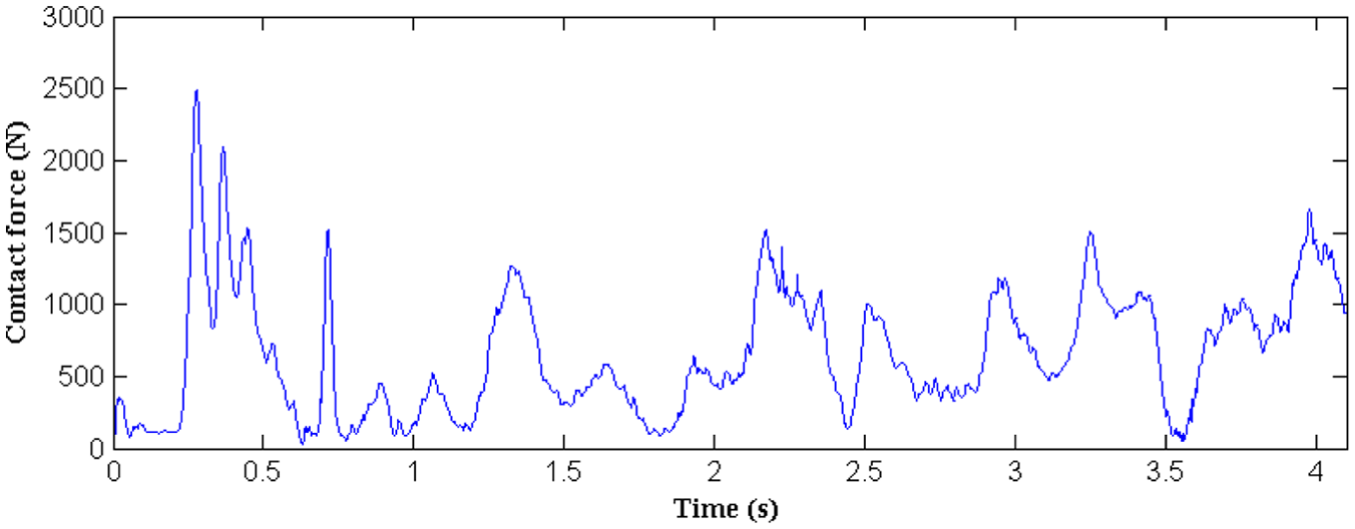
Tension of chain running on middle troughs.
As shown in Figure 6, considering the situation of chains running from transitional troughs to drive sprocket 1, the operation process is divided into three stages:

Tension between plate and vertical in pre- and post-engaging process.
Accordingly, the variation of driving torque of sprockets is exhibited in Figure 7. After starting up, drive sprockets 1 and 2 rotate at the same angular velocity accompanied by erratic numerical fluctuation of torque value at stages S01 and S02, respectively. Then, either of the sprockets reaches stable state like stages S12, S23, and S34 shown in Figure 7(a) and stages S56, S67, and S78 shown in Figure 7(b). For the dynamic model, arbitrary two adjacent scrapers are equidistantly arranged. It is evident that the driving torque exhibits higher value with a sudden increase when the scraper begins to engage with the sprocket. Particularly, a disordered variation of the torque value occurs during the engagement of chains and sprockets, due to transversal and longitudinal vibration, load impact and uneven chain velocity of the transmission mechanism.

Driving torque of sprockets: (a) sprocket 1 and (b) sprocket 2.
Tension distribution estimation method
Discrete modeling process
Due to the viscoelastic properties of the ring chains, the article utilizes MATLAB package and discretizes the left single chain subsystem into a system of Kelvin models based on the finite element method, further establishes the mathematical model, and studies the longitudinal dynamic characteristics of the discrete system. The assumptions are given as follows:
To ensure the reliability of the discrete system, the simulation process is described by stiffness and damping and so on. Aiming to conform to the actual RCTS, all parameters required are set in accordance with the virtual prototype model, whose driving torques serve as the inputs of the mathematical model.
As the inclination angle of transitional trough has little effect on the longitudinal force of ring chains due to long distance transportation of the RCTS, we establish the mathematical model which neglects the effect of the inclined plane relative to dynamic model of the actual RCTS, as shown in Figure 3. In this article, all contact pairs on the inclined plane are treated without taking the inclination angle into consideration.
According to the one-dimensional (1D) longitudinal discrete system (Figure 8) built in this article, any one of the chains works as a discrete element. For simplicity, equivalent mass of scrapers, chains, and external loads is evenly distributed to the elements along the transmission trough. For the head and tail of the discrete system, when the chain stakes seat in the teeth of a sprocket, the sprocket and chains wrapping around are integrated as a single discrete element.
Moreover, the dynamic behaviors of the discrete system are discussed and analyzed neglecting polygonal action and meshing impact during the engagement process. In our work, we just take the left single chain subsystem as the research object.
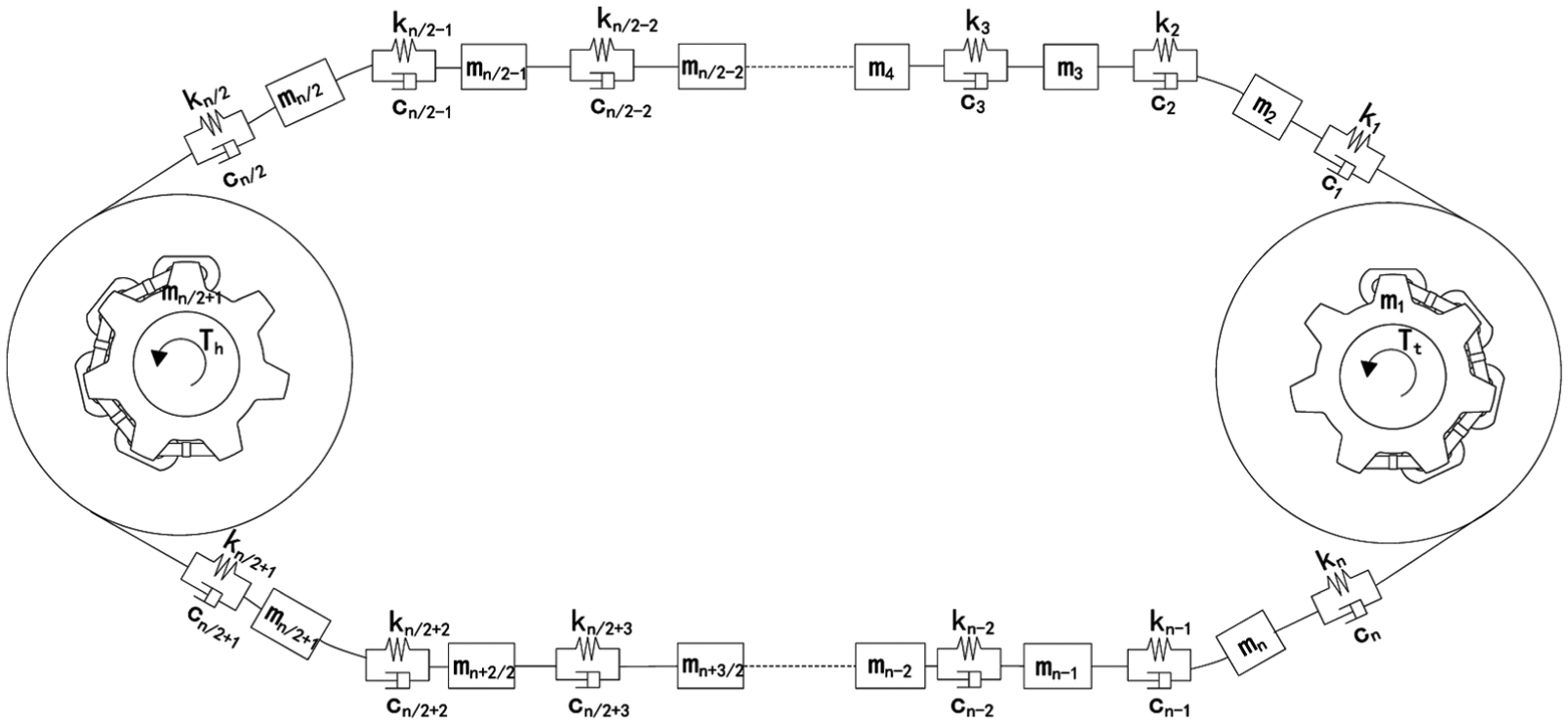
One-dimensional longitudinal discrete system.
As shown in Figure 8, the elements are assumed to be elastically connected to each other and modeled as Kelvin modules, which allows force transfer of the left single chain subsystem. The viscoelastic model is dominated by elasticity and damping, and contact force between contiguous elements is given by

where




where
Numerical solutions
State-space equation
Based on equations (10)–(12), the differential equations of the time-invariant linear system are reflected by

where M ∈ Rn × n, C ∈ Rn × n, and K ∈ Rn × n are the mass matrix, the damping matrix, and the stiff matrix of the elements, respectively,


Matrices and vectors are established as



where A, B, Y, and H are constant system matrix, control matrix, output matrix, and transformation matrix, respectively. Y is defined as the output of the system, Z is the state vector and U is the input vector,
Solutions of differential equation
With respect to the state-space equations, we develop the general scheme as


Functions

Since the mathematical equations are continuously differentiable, in this section, the solution method is derived using classical fourth-order Runge–Kutta formula, 21 which can be given by


where

Tension distribution method
The actual RCTS (Figure 3) is characterized by contact pairs between vertical chains and plate chains, and plate chains and sprockets. To date, a contradiction is formed due to practical engineering requirements and the measurement restrictions. The observer-based tension distribution method is proposed to monitor tension of the RCTS by estimating contact forces of ring chains and can solve the above contradiction.
Equations (17) and (18) are assembled to reconstruct the linear observer 22 and provide sufficient guidance for the design of the proposed estimation method, and we have


where

Reconstruction process of the state observer.
Based on full-order design, the state observer can estimate all state variables of the state-space model and get the change rules of displacement, velocity, acceleration, and contact force of all discrete elements (Figure 8) at any time set by sampling period h. With high relevance in applications, the observer-based tension distribution estimation method can get tension variation of actual RCTS by replacing the unmeasurable contact forces with observed results.
Estimation process and simulation results
Construction of the spatial tension distribution model
As mentioned in section “Tension distribution estimation method,” the proposed estimation method is employed to estimate unmeasurable contact forces of the actual RCTS reflected by the reconstructed state variables. The RCTS is modeled as n (

Simplified contact points.
According to the positions of the contact pairs between two adjacent elements, the closed RCTS can be transformed into a spatial tension distribution model. Furthermore, the model is beneficially established to research the longitudinal tension characteristics of the RCTS, where each contact pair is replaced by a specific numbered spatial contact point with one translational DOF, that is, point

Spatial tension distribution model.
For the left single chain subsystem, the mass of main components and bulk materials being carried vary with time and space and are evenly distributed according to the distribution of spatial contact points. Numerical simulation is carried out under uniform working loads and pretension force, and both of the drive sprockets run at a constant speed of 2.56 rad/s during the steady operation stage. The positive direction of the arrow as shown in Figure 11 is chosen, and the speed curve is shown in Figure 12.

Angular velocity of the drive sprocket.
Novel dimension-minimized algorithm
In this article, the observer-based tension distribution estimation method has a low computational efficiency due to high dimensionality of the system, and the order of the reconstructed observer is inherently high. As a consequence, a novel dimension-minimized algorithm suitable for the large-scale system is introduced. The resolution procedure is summarized as follows:
1. Tension variation of spatial contact points yields directly to the state variables of the observer; we first confirm that the total number of state variables is 2n determined by 2 discrete sprocket elements and
2. Then, we integrate

3. On combining equations (14)–(16), the new constructed observer is reflected by

The stiffness coefficient K and damping coefficient C are described as
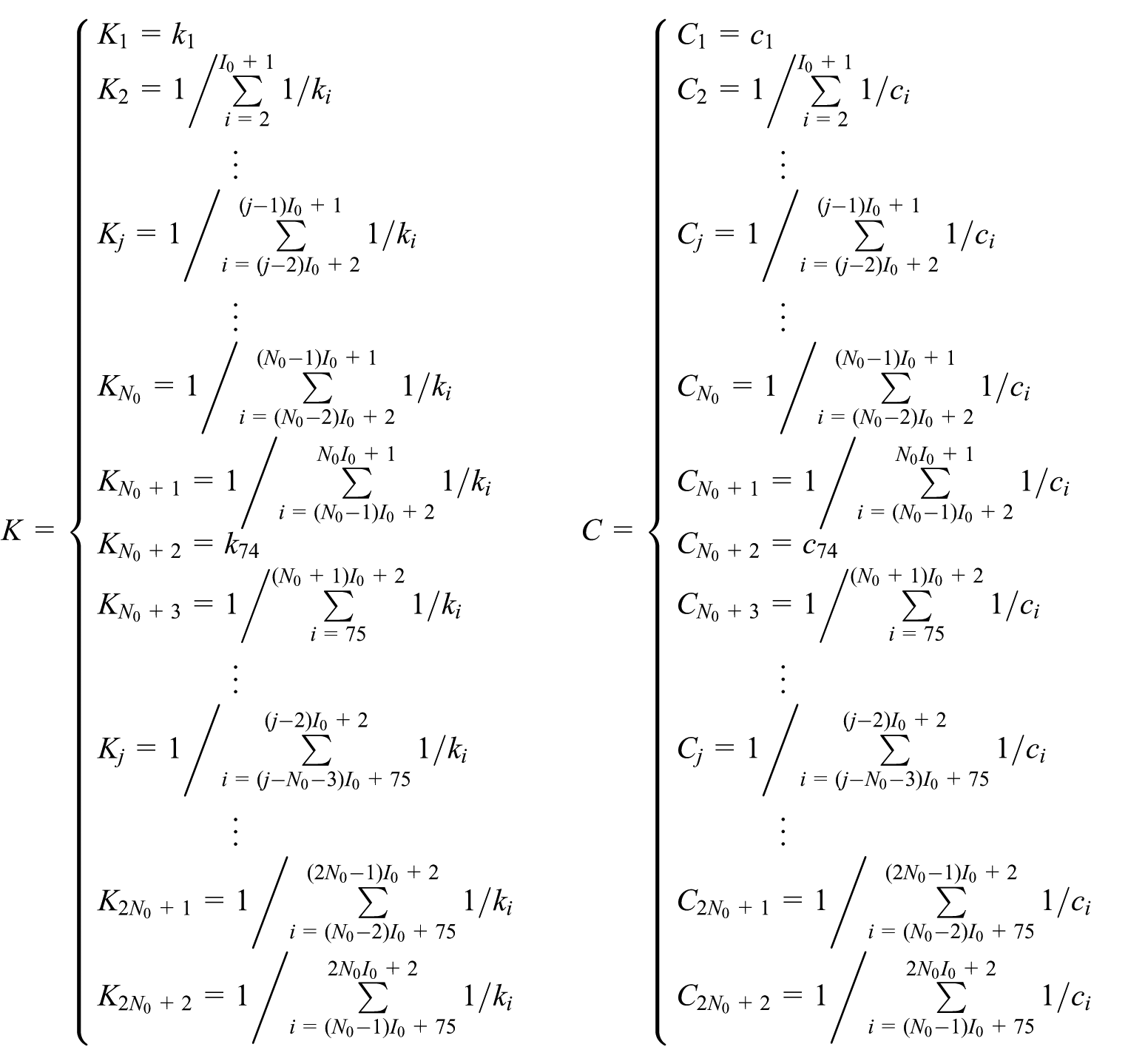
Also, the parameters used are defined as


As described in aforementioned method, the dimension of the new reconstructed observer is variable and determined by parameter I0. For this study, we take q available state variables as the inputs of the observer by equal interval sampling, which is corresponding to contact forces of q spatial contact points measured by tension sensors; besides, the transformation matrix H is performed to define the minimum value of parameter q. In this section, the estimated tension vector of


where

Simulation results and discussion
Through a proper set of initial condition for the normal starting up of the RCTS, the longitudinal tension distribution rules are discussed during stage of constant speed (

Tension distribution estimation results: (a) I0= 2, (b) I0 = 3, (c) I0 = 4, (d) I0 = 6, (e) I0 = 8, and (f) I0 = 9.
As shown in Figure 13(a)–(f), tension differences are presented as the 3D curved surfaces. Meanwhile, the estimation result reveals that tension of the upper chain and lower chain subsystem exhibits an overall increase in the ascending order of contact points
To validate the consistency of estimation performance, comparisons between actual tension

Tension variation trajectories: (a) I0 = 2, (b) I0 = 3, (c) I0 = 4, (d) I0 = 6, (e) I0 = 8, and (f) I0 = 9.
It could be clearly seen from the simulation results that estimation errors of the tension occur at different levels of



The RMS values for different levels of
RMS values.

RMS: root mean squared.
We can confirm that the approximation value of

Histogram of calculation results.
Conclusion
This article investigates the tension distribution rules of the RCTS, which can provide reference for transient dynamic analysis to monitor tension variation of the ring chains. Due to the complexity of the system, a virtual prototyping model has been presented based on multi-body dynamics theory and polygonal contact mode, for determination of matching the actual system and investigating dynamic contact properties under uniformly distributed loads during the practical transmission process. To this end, the system is discretized into n elements reflected by Kelvin models and expressed as a mathematical model. For research purpose, the demonstrated tension distribution estimation method is designed based on linear observer and the state-space formulation.
For the high requirements of computational efficiency of the high-dimensional reconstructed observer, we raise the novel dimension-minimized algorithm to deal with the numerical simulations based on the choice of I0. More precisely, the smaller the set of I0, the higher the order of the observer M0, and the minimum q measurable states are applied to estimate contact forces of the contact points in the spatial tension distribution model. Subsequently, comparisons are made through RMS errors within a reasonable range, which have validated the correctness of the virtual prototyping model and satisfactory estimation results of the proposed tension distribution estimation method.
The tension variation reflects the working state of the actual RCTS. For this work, we first combine dynamic modeling and state estimation method to predict tension of the ring chains, which indicates excellent estimation ability. There still remains extensive research space for our future works, as the scraper conveyor works in odious conditions. In addition, we further take the speed difference between driving sprockets and the non-uniform distributed load between the ring chains into consideration in our later research. The ongoing project aims to adapt the estimation method to variable working conditions with respect to abnormal loads and rotational speeds, which serves as a theoretical basis for real-time tension monitoring and fault detecting of the RCTS, and allows for system maintenance and improvement of coal safety and high-efficient production in the future work.
Footnotes
Academic Editor: Yangmin Li
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: The work was supported by the Key Project of National Natural Science Foundation of China (U1510205), the Natural Science Foundation of Jiangsu Province (No. BK 20160251), Xuzhou Research program (KC14H0138), the Fundamental Research Funds for the Central Universities (2014Y05), and the Project Funded by the Priority Academic Program Development of Jiangsu Higher Education Institutions (PAPD).