In this article, we present a sub-critical two-dimensional shallow water flow regulation. From the energy estimate of a set of one-dimensional boundary stabilization problems, we obtain a set of polynomial equations with respect to the boundary values as a requirement for the energy decrease. Using the Riemann invariant analysis, we build stabilizing local boundary conditions that guarantee the stability of the hydrodynamical state around a given steady state. Numerical results for the controller applied to the nonlinear problem demonstrate the performance of the method.
Controlling the water levels and flows in river and dams is of a considerable societal interest, and it is the subject of much research in river engineering and control theory. Several control models have been developed to regulate the one-dimensional (1D) water flow. For instance, an algebraic Faedo–Galerkin method is proposed by Sene et al.1 where the design of a feedback control law is such that the energy decreases exponentially. The 1D flow regulation has also been addressed by the Riemann invariant analysis.2–6 This comes out with a control law exercised on the flow through the upstream and/or downstream boundaries. To date, the extension to the two-dimensional (2D) setting has been limited in a restrictive manner. For example, a global H2 stability result for a particular parabolic profile is achieved by Aamo et al.7 and Balogh et al.8 for the 2D Navier–Stokes equations. The authors use the actuators and the sensors only at the boundary wall. Also, under geometrical requirements, a local explicit feedback boundary control law is presented by Dia and Oppelstrup9 for the stability in L2-norm of the 2D shallow water equations (SWE).
This article addresses the design and the implementation of local feedback boundary conditions that stabilize 2D shallow flow. The control’s objective is to bring the water volume to a desired steady state as fast as possible and it is subjected to the proper choice of a time-dependent boundary function called action. The implementation of such control law requires only the measurement of the initial state. The fluid movement is modeled by the SWE and is supposed to be sub-critical at the equilibrium set; hence, the well-posedness of the associated initial boundary-value problem requires two boundary conditions on the inflow boundaries and one condition on the outflow boundaries or impermeable boundaries. Considering that the controlled portion is an inflow boundary, the problem task is that of filling a bathtub with specified normal flow at the uncontrolled boundary part. For that, we use the 1D control technique developed by Dia10 to establish stabilizing boundary conditions for the 2D SWE. The controller building process is based on the analysis of the characteristic variables of 1D hyperbolic systems. Those 1D systems are derived from a linearized version of the 2D SWE. Indeed, the main idea of this derivation is to neglect the residual rotational motions of the perturbation state so that the physical domain (for the system governing the perturbation state) is covered by a family of lines emanating from the controlled boundary portion. Afterward, a high-resolution finite volume method is used to assess the effectiveness of the proposed control law.
The rest of the article is organized as follows. In section “Setting of the problem,” we present the stabilization problem, linearize the control system around the steady state, write out the linear model governing the perturbation state, and list the main assumptions. Section “Stabilization of a dimensional reduced problem” addresses the control building process for a 1D stabilization system. Afterward, section “Numerical simulations” focuses on the original control problem; the boundary conditions for the nonlinear problem are defined and numerical experiments are performed to illustrate how the built boundary conditions stabilize the 2D nonlinear SWE.
Setting of the problem
Governing equations
Consider a three-dimensional domain with a flat bottom in which water flows with a free-surface denoted by , a smooth open domain of , with boundary . The SWE is a set of hyperbolic partial differential equations (PDE) derived by depth integrating the Navier–Stokes equations11,12 where one assumes that the horizontal length scale of the domain is much greater than the vertical one. In the absence of Coriolis effect, frictional, diffusion, and wind effects, the 2D SWE with boundary controller are
where , , in the equations, is the height of the water column, is the velocity vector with reference to , and is the acceleration due to the gravity. The vector is the external normal vector at the boundary. The steady state is the target state of the stabilization process and it is the solution of the stationary problem associated with equation (1). The quantity represents the normal flow for the residual state at the uncontrolled boundary portion . The physical domain is supposed to be uniformly convex with Lipschitz boundary. With given initial state , the control’s problem aims to provide suitable boundary condition on so that the state converges in time towards the equilibrium set .
Linearization
The SWE is derived under the hypothesis of hydrostatic balance and are based on physical nonlinear principles, whereas the design of boundary control for fluid phenomena relies on linearized wave models which are appropriate for the control of small disturbance. We introduce the conservative variable vector , where and is the volumetric flow vector. Thus, equations (1a), (1b), and (1c) can be recast as
where
Considering that the control’s objective is to reach the steady state, we introduce the residual state as the difference between the present state and the steady state
Linearizing equation (1) around the steady state produces the linearized model
where
In the next subsection, the control problem (1) will be written as a stabilization problem of the above linearized system around .
Linearized boundary control problem
Equation (3) supports three families of wave solutions and the linearization changes dispersion forces but conserves energy of the wave field. The stabilization of equation (1) (reach the steady state) around has been replaced by the stabilization of equation (4) (cancel perturbation) around with prescribed initial conditions. Therefore, our control’s objective is now to find a boundary controller on , that is, boundary conditions to apply there, so that is stable around . For that, we consider the linearized control problem
Classical boundary conditions such as wall condition, periodic boundary conditions, and absorbing boundary conditions could be set to the system (4). However, we seek for boundary conditions that also give well-posed initial boundary-value problem (IBVP) and are able to bring the state to as fast as possible.
It is worth noting that equation (4) is a well-posed IBVP; see the construction of admissible boundary conditions9,13 for more details. In the next subsection, we list the assumptions to delineate the frame of the building process of the boundary controller.
Assumptions for the boundary conditions design
In this subsection, we list the assumptions and define the plan of the building process of the boundary conditions :
A1: To keep the building process of the stabilizing boundary conditions as simple as possible, we restrict our study to uniform steady states, but this is not necessary for the derivation of equation (4). A typical case of an application where this argument rests is the flow regulation of a river/lake with navigability constraints (regulation of the Sambre river and the Meuse river in France and Belgium by Bastin et al.14). Linearization around non-uniform steady state provides variable Jacobian matrices and is outside the scope of this article. A method for the design of local boundary conditions that stabilize 2D SWE around a non-uniform equilibrium will be discussed in a forthcoming paper.
A2: We deal with the sub-critical flow regime. Accordingly, we specify the flow vector at inflow (i.e. on ) and prescribe the normal flow rate through the boundary part .15,16 In others words, to define the boundary conditions (4c) and (4d), we only need to design . The normal flow at equation (4d) is a reflecting boundary condition for the gravity waves on the uncontrolled boundary portion , and it will be computed according to the control law on .
The assumption of the sub-critical flow regime also implies that the values and of the equilibrium state are non-zero, and the Froude number satisfies . For the sake of simplicity, we consider and positive, especially in the numerical experiments.
A3: We deal with a uniform convex domain with Lipschitz boundary . We denote by the viewing angle of the controlled boundary portion , and the angle between the x-axis and the straight line . The latter passes through and intersects the boundary at points and with and as illustrated in Figure 1.
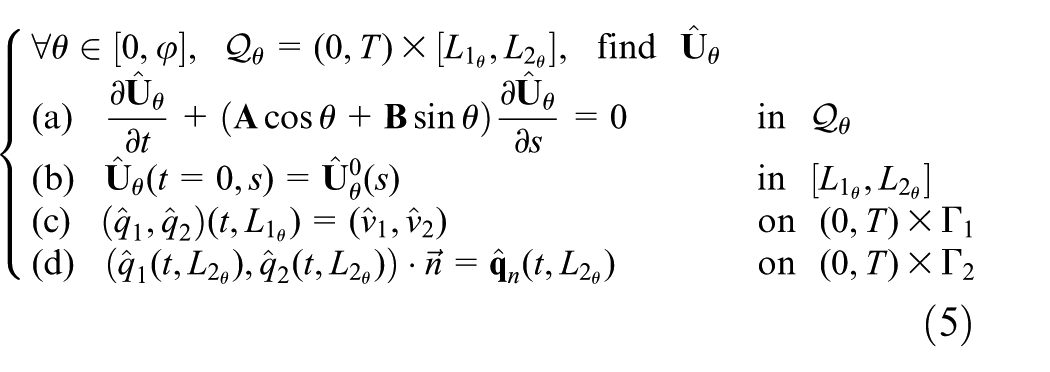
A4: Under the assumption of flow irrotationality, we move from the Cartesian coordinates to the specific family of lines , where . We then make the reduction in the domain dimension from 2D to 1D by disregarding the -dependence of . Let be the unit vector of components along . We use the notation for the approximation of the residual state over the line . Projection of the 2D equations (4) onto the lines produces a set of 1D hyperbolic problems
Although the system (5) varies with the plane-polar coordinates , it describes the disregarding of of the linearized model (4) but it is not standing for the linearized version of the polar coordinates SWE,17,18 since we drop the terms . This transformation concerns only the design of the boundary conditions but not for the control system. Therefore, it is crucial to note that the irrotational assumption is restricted to the perturbation state and only for the purpose of building local boundary conditions.
It is then adequate using equation (5) to analyze the wave dynamics. Indeed, the regularity is conserved through equation (5) since the system (4a) is strictly hyperbolic19—A4 leads to the uncoupling of the controlled portion of the boundary so that controlling one point on can be done using only two points which are aligned along a ray. The singular value decomposition of the flux matrices of the polar coordinates of 2D SWE with combined with the absence of Coriolis effects reveals an important dominance of the term .
The shallow water gravity waves governed by system (5) obey unidirectional radial dispersions. Hence, they allow us to analyze the flow over a specific family of lines. To build stabilizing conditions, a flux analysis will be carried out by considering . In the next section, we present the design of stabilizing boundary conditions for equation (5) for a fixed .
Schema of the domain treatment with controlled boundary portion and uncontrolled boundary part .
Stabilization of a dimensional reduced problem
So far, we have written the control problem (1) in terms of cancelation of the perturbation state and have derived a set of 1D control problems. In this section, a stabilization result of the reduced 1D problem is presented. Consequently, the control and the normal flow will be designed using only the upstream boundary information, as described by Dia.10
Characteristic variables
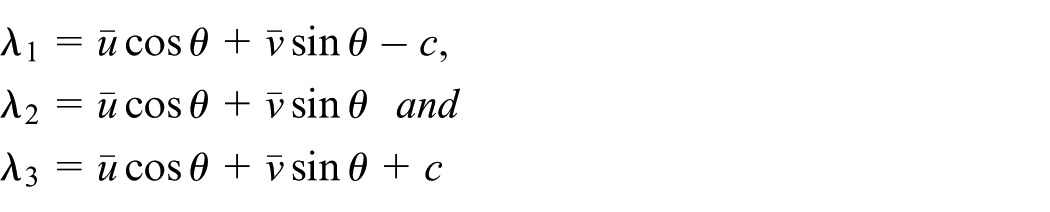
The eigenvalues (phase speeds) of the matrix are
Let and be, respectively, the diagonal matrix of eigenvalues and the matrix of eigenvectors of , then where
and . After multiplication from left of by , it appears
where . The Riemann invariants (normal modes) for can be written out in details
The quantities and are viewed as volumetric flow variables over the line . The sub-critical regime implies that and that there are gravity waves (waves with velocities and ) propagating in opposite directions. It follows that and while the sign of is not known in advance since it depends on . In fact, the sign of determines the flow direction over the line . Choosing corresponds to a regime with inflow at the boundary . The domain description (assumption A3) ensures that and sets the reference such that for a given steady state and for all .
Boundary controller building process
For a fixed value of , we denote and consider the 1D stabilization problem for a channel flow controlled by one gate opening using an upstream boundary control over as depicted in Figure 2.
Lateral view of the reduced one-dimensional domain with upstream boundary control action.
To build the stabilizing boundary condition for the control problem (5), we consider the eigenstructure system
where the time-dependent function defined in stands for the upstream boundary action and the parameter is chosen with respect to the gravity velocities, the stabilization rate , and the initial condition . Functions and will be defined, and the boundary conditions and for will be justified.
Definition 1
For all fixed , we consider the following energy of (10)
where is an arbitrary positive number.
This is the quantity to be stabilized and represents the stabilization rate. This definition shows that the energy can only change according to the changes of across the boundaries. The weighting term in equation (11) makes sense since for as guaranteed by the physical domain description (assumption A3).
Let us remark that the hyperbolic equation (10) can be controlled performing output feedback force20 on the energy quantity (11).
Dissipative boundary conditions
For , one integrates on the product of by and sums the three obtained relations to write the following energy estimation
Exponential decay of the energy is achieved when the right-hand side (RHS) of equation (12) is non-positive.
We choose an action satisfying
where . The relations (13)–(15) are dissipative boundary conditions21 which are a sufficient exponential stability condition for equation (10). Our idea to fulfill the stability is to define an upstream action using equation (15) and then to determine the corresponding flow rates and by satisfying equations (13) and (14).
Definition of the boundary action
The boundary action can be defined as a damping function acting on the inflow at the upstream boundary . To express the boundary action , we consider the third characteristic equation
We integrate equation (16) over the characteristic line from to to get
Then, we act on the characteristic variable at the boundary
where is a time-dependent function. Therefore, using equation (17), we get
Finally, to satisfy equation (15), we have to define the action function such that
Note that the action is completely defined when it is given on . The control action requires as observability time and it is being defined for . In the time interval , the function can be chosen arbitrarily provided that . It is arbitrary in the sense that any non-growing function can be set to it.
Boundary conditions at (downstream)
According to the signs of the eigenvalues, only one condition should be stood at this boundary; we deal with
This condition reflects the gravity waves ( and ) and can be written as
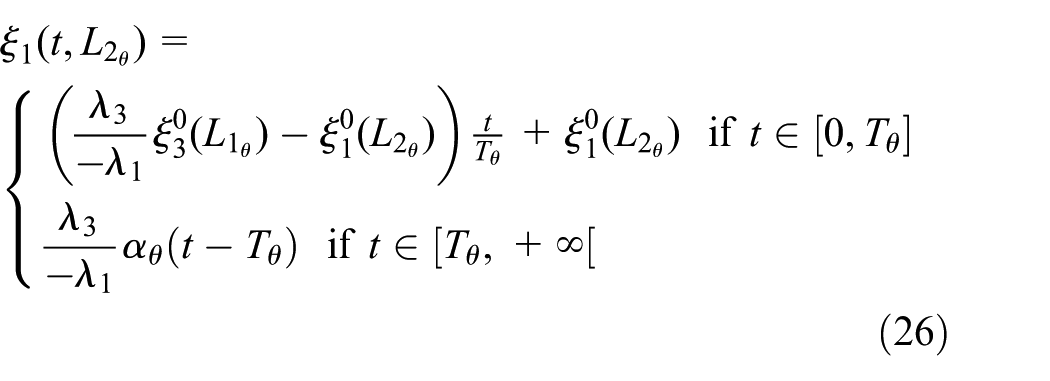
This last characteristic decomposition reveals that boundary condition (22) for on is not yet defined, because for , the function is not acting on the characteristic variables and but only on the characteristic variable since it is being defined. To fill that gap, we consider the fact that can be written out at the initial time
and we use the following linear mapping;
The boundary condition at the downstream boundary is then given by
Boundary conditions at (upstream boundary controller)
The conditions at are completely defined by the prescription of the flow . We get those quantities by writing equations (13) and (14) as two second-order inequalities with respect to and , respectively. To replace and in the inequalities, one uses equations (17) and (18) and condition (22) to write: for
Thanks to equation (27), the left-hand side (LHS) of equations (13) and (14) can be written as second-order polynomials with respect to and , respectively, and whom the roots are
where
According to the coefficient of the second-order monomials, we choose the mean value of and
and select
where . We can now write explicitly the boundary condition for at corresponding to the action for using characteristic variables
where
As for the variable , the boundary condition at for on is not yet defined. To do so, we consider the choice of such that
Such exists, belongs to and satisfies equation (32) according to the initial conditions. At the conditions are written as follows
We are now in the position to state our basic result for the exponential stability of a 1D hyperbolic system by means of the time-dependent action .
Theorem 1
If the initial condition is in , then there exists an upstream boundary action such that the stabilization system (10) has a unique global solution and the following energy estimation holds
Proof
It is well known that the unique solution with the initial condition has the form for .
The exponential decay of the energy holds since the non-positivity of for is guaranteed by the setting of boundary conditions (26), (33), and (34).
Remark 1
The action and the energy have the same decay rate but the energy vanishes with a time delay of . Besides, this action is cost-effective in the practical manner since it requires only the local values at of the solution and just for .
Remark 2
For satisfying (32), we have
where is orthogonal to (i.e. ) and
Numerical results
To illustrate the exponential decay of the energy computed from the family of 1D hyperbolic systems, we consider the following spatial discretization
and
for and . The first-order upwind method19 is applied to the hyperbolic system (10) with a constant action on and the condition extracted from the initial state (see Figure 3).
Decay of the energy for the family of 1D stabilization problems.
Stabilization rates provide the same shape of the energy decay within the time interval , where . After this time, the decay rate is quicker for larger , but slows down after some time to approach the energy decay time-constant . The stabilization rate is related to the energy decay rate and the initial increasing. In this sense, the value can be viewed as the cost of the action. The “optimal” provides a compromise between a quick stabilization and a cost of the control effort.
Numerical simulations
In this section, we define the stabilizing boundary conditions for the nonlinear system (1) and perform numerical simulations.
Boundary conditions for the 2D SWE
Here, the problem consists of setting explicitly the conditions and perform numerical experiments for the control system (1).
Definition 2
For any point of coordinates belonging to the boundary portion , the control is defined as
Definition 3
For any point of coordinates belonging to the uncontrolled boundary part , the normal volumetric flow is given by
where the quantities , , and are given in Remark 2.
Next, we implement the defined boundary conditions for the real 2D SWE.
Implementation
Performing numerical simulations on a fluid domain with less symmetry requires specific scheme able to capture the boundary instabilities. For the sake of simplicity, we consider the use of quarter-annulus domain which simplifies the boundary conditions on since the quantity matches with the normal boundary flow. The boundary condition (1f) becomes . The second-order finite volume wave-propagation algorithm19,22–24 for the 2D nonlinear SWE (1)-(37)-(38) is
The quantity is the approximation at time of the exact solution to the cell average
The 2D grid cell is defined as
where and . The time where the non-constant time-step is computed under the Courant–Friedrichs–Lewy (CFL) stability condition. The fluctuations and represent the first-order update to the cell value resulting from the Riemann problems at the edges. Second-order correction terms and are incorporated as in the 1D space based on the waves obtained from the 1D Riemann solution normal to each edge. We have limited the flux corrections , and so on using the minmod limiter.
To implement the controller, we consider a rectangular domain containing the quarter-annulus . Between two consecutive time-steps, the flow vector is set to zero (i.e. ) over the cells localized strictly outside . With respect to the boundary conditions, we have dealt with over the cells crossing the boundary portion and over the cells crossing .
For the numerical experiments, our interest is in the behavior of the dynamics of the controlled shallow water waves and the variation of the energy of the perturbation state subjected to the control law.
Test 1: dynamics of the controlled nonlinear waves
The objective of this test consists of bringing as quick as possible the state to the equilibrium set by the proper choice of the incoming volumetric flow (Figure 4).
Water level according to the boundary control effects in a quarter-annulus domain.
The control introduces and propagates waves from , and this propagation operates radially in the time interval , where . For , the reflected waves from and the incoming ones from give rise to probable bi-dimensional waves. Attempts at higher stabilization rates produced very large control actions and violent flows which need extremely small time-steps and the generated moving shock wave becomes stronger.
Test 2: effect of the stabilizing boundary conditions
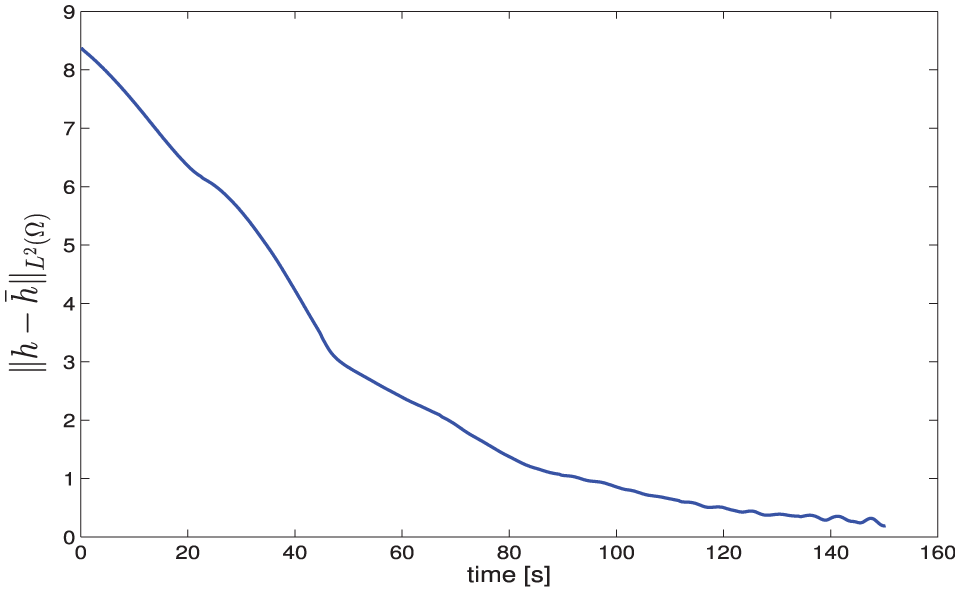
Figure 5 displays the variation of the perturbation energy for the height caused by control law with the following data: , , , and with the initial conditions and using an exponentially decreasing action.
-norm of the perturbation of the height in the dimension of time.
The exponential shape of the energy decay showcases the robustness of the control . The stabilization rate is chosen very small. Consequently, the decay rate of the action is close to 1. The action is then decreased sequentially with very small amplitude diminution. It is worth noting that the monotone exponential stability for the 2D nonlinear SWE does not yield from the exponential stability of the linearized SWE. The extension of the approach developed by Coron et al.25 may produce monotone exponential decay for the nonlinear problem via the linearized problem.
Conclusion
We apply 1D Riemann invariant analysis to build a boundary controller for the 2D shallow water model. In the corresponding 1D stabilization problems, the upstream boundary inflow is chosen as a suitable action on the third characteristic variable. Numerical experiments with a high-resolution dimensionally split finite volume method using Roe linearization shows that the developed control law works on the 2D nonlinear shallow water model, for small stabilization rates. Large stabilization rates give violent flows and the numerical stability issue can be addressed combining continuous and discontinuous Galerkin methods.
Footnotes
Handling Editor: Yong Chen
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This paper is funded by King Fahd University of Petroleum and Minerals (KFUPM).
References
1.
SeneAWaneABLe RouxDY. Control of irrigation channels with variable bathymetry and time dependent stabilization rate. C R Math2008; 346: 1119–1122.
2.
BatlleVPerezRRRodriguezLS. Fractional robust control of main irrigation canals with dynamic parameters. Control Eng Pract2007; 15: 673–686.
3.
ChenMLGeorgesDLefevreL. Infinite dimensional LQ control of an open channel hydraulic system. In: The 4th Asian control conference, Singapore, 25–26 September 2002. ASCC.
4.
CoronJMd’Andrea NovelBBastinG. A strict Lyapunov function for boundary control of hyperbolic systems of conservation laws. IEEE T Automat Contr2007; 52: 2–11.
5.
CoronJMd’Andrea NovelBBastinG. A strict lyapunov function for boundary control of hyperbolic systems of conservation laws. In: CD-Rom proceedings (ECC 99), Karlsruhe, Germany, 31 August–3 September 1999.
6.
WeyerE. LQ control of irrigation channels. IEEE T Contr Syst T2008; 16: 664–675.
7.
AamoOMKrsticOMBewleyTR. Control of mixing by boundary feedback in 2D channel flow. Automatica2003; 3: 1597–1606.
8.
BaloghALiuWJKrsticWJ. Stability enhancement by boundary control in 2-D channel flow. IEEE T Automat Contr2001; 46: 1696–1711.
9.
DiaBMOppelstrupJ. Stability by boundary control of 2D shallow water equations. Int J Dyn Control2013; 1: 41–53.
10.
DiaBM. Exponential stability of shallow water equations with arbitrary time dependent action. Int J Dyn Control2014; 2: 247–253.
11.
BreschDDesjardinsB. Existence of global weak solutions for a 2D viscous shallow water equations and convergence to the Quasi-Geostrophic model. Commun Math Phys2003; 238: 211–223.
12.
MarcheF. Derivation of a new two-dimensional viscous shallow water model with varying topography, bottom friction and capillary effects. Eur J Mech B: Fluid2007; 26: 49–63.
13.
NordstromJSvardM. Well-posed boundary conditions for the Navier–Stokes equations. SIAM J Numer Anal2001; 43: 1231–1255.
14.
BastinGCoronJMd’Andrea NovelB. On Lyapunov stability of linearised Saint-Venant equations for a sloping channel. Netw Heterog Media2009; 4: 177–187.
15.
GhaderSNordstromJ. Revisiting well-posed boundary conditions for the shallow water equations. Dynam Atmos Oceans2014; 66: 1–9.
16.
MacDonaldA. A step toward transparent boundary conditions for meteorological models. Mon Weather Rev2001; 130: 140–151.
17.
RoyGDHumayum KabirABMMandalMMet al. Polar coordinates shallow water storm surge model for the coast of Bangladesh. Dynam Atmos Oceans1999; 29: 397–413.
18.
RoyGDFazul KarimMdIsmailAIM. A nonlinear polar coordinate shallow water model for tsunami computation along North Sumatra and Penang Island. Cont Shelf Res2007; 27: 245–257.
19.
LeVequeRJ. Finite volume methods for hyperbolic problems (Chapter 18, Cambridge texts in applied mathematics). Cambridge: Cambridge University Press, 2002.
20.
SudhakaraRLandersRG. Design and analysis of output feedback force control in parallel turning. Proc IMechE, Part I: J Systems and Control Engineering2004; 218: 487–501.
21.
De HalleuxJ. Boundary control of quasi-linear hyperbolic initial boundary-value problem. Louvain-la-Neuve: Presses universitaires de Louvain – Université Catholique de Louvain, 2014.
22.
Chacon RebolloTDelgadoADFernandez NietoED. A family of stable numerical solvers for the shallow water equations with source terms. Comput Method Appl M2003; 192: 203–225.