
Abstract
This study proposes a multi-degree-of-freedom wave energy converter and introduces a 6-PSS (prismatic pair–spherical pair–spherical pair) power take-off mechanism. The frequency- and time-domain dynamic models of a 3-degree of freedom wave energy converter are established. The time-domain model based on frequency-domain data is usually built upon the Cummins equation. The convolution terms in the Cummins equation are substituted by a state-space system by the frequency-domain identification method in this work. The power absorption of the wave energy converter is studied in both regular and irregular waves. It is shown that the advantages with the converter in resonance with waves are evident in regular waves and not so obvious in irregular waves. The appropriate value of power take-off damping terms has relative border range in irregular waves, which can be chosen according to the trends. Through optimization, the total power absorption in the three directions is close to 126 kW. The results indicate that the multi-degree-of-freedom wave energy converter can extract more energy.
Keywords
Introduction
Offshore wind and wave energy are clean and renewable,1,2 and the wave resource is more predictable and less variable than the wind resource. Ocean wave energy converters (WECs) have made great development since the 1970s. The development status of WECs has been summarized in detail. 3 Currently, there are no many successful commercial applications and some issues still exist, such as the low power absorption efficiency.
Oscillating body systems are a large class of WECs, typically in water depths between 40 and 100 m. They generally extract power through relative motion between two bodies. AquaBuOY 4 and Wavebob 5 oscillate in the heave motion. SEAREV6,7 and Pelamis 8 oscillate in the pitch motion. Some attractive device is invented to oscillate in the heave and pitch motions.9–11 Some of the WECs have been in the commercial stage. Ocean power technology (OPT) is currently deploying OPT arrays at a number of sites, including 1.4- and 2.0-MW commercial projects off the coasts of Spain and Oregon, respectively. In 2008, Pelamis deployed three attenuators with a combined rating of 2.25 MW off the coast of Portugal. 12 As we all know, the free oscillating body has 6-degree of freedom (DOF) motions in the waves. So, it is necessary to invent new multi-DOF power take-off (PTO) mechanisms to absorb the energy of the oscillating body to improve the power absorption.
Parallel mechanism possesses the advantages of high stiffness and carrying capacity, 13 which can be considered to work as the PTO mechanism. The 6-PSS (prismatic pair–spherical pair–spherical pair) mechanism is a variation type of the Stewart platform. This mechanism configuration can be used in compliant wrist 14 and machine tool. 15 In most cases, the actuating components are placed in prismatic pairs and the platform works as the manipulator. The idea that the platform works as the driving component is presented here, which has 6-DOF induced by the ocean waves. However, the concrete structure of the WEC is not provided here.
This article studies the power absorption performance of a 3-DOF WEC oscillating in three directions (surge, heave, and pitch). Numerical studies of waves interacting with a cylindrical point absorber have been made. 16 The effects of the geometry, the mooring system, and the mass distribution of a tethered wave energy absorber based on a vertical cylinder have been studied. 17 The influences of mooring cables of a WEC through the frequency-domain analysis have been given, 18 which also selected the cylinder as the oscillating body. Therefore, the vertical cylinder is a starting point because hydrodynamic coefficients can be obtained by analytical expressions, 19 which used variable separation and eigenfunction expansion of the potential in cylindrical coordinates. In addition, the 3D boundary element method (BEM) such as WAMIT, WADAM, and AQWA-LINE can be applied to obtain the hydrodynamic coefficients.
Wave energy absorption by means of oscillating bodies can be analyzed by frequency or time-domain models. Because of its simplicity, frequency-domain models have been widely used. Another approach is the time-domain equations proposed by Cummins. 20 In these equations, the wave forces including the incident, diffracted, and radiated can be obtained by frequency models. The convolution terms in Cummins equation are not convenient for numerical calculation, and the analysis and design of motion control systems. A method to approximate the convolution with a state-space system has been proposed. 21 Perez et al. 22 have compared different methods for replacing the convolution in terms of complexity and performance. Perez et al. not only have compared the quality of estimated models but also on the ease of implement. Cheng et al. 23 modeled a point absorber WEC with direct-drive linear PTO based on both frequency- and time-domain models. J Pastor and Y Liu 24 also presented, assessed, and optimized a point absorber WEC through numerical modeling, simulation, and analysis in both frequency- and time-domain. This article employs the frequency-domain identification method, which has been considered the simplest method to implement.
In this article, the 6-PSS mechanism is introduced first and the number of DOFs of the mechanism is calculated. Then, the power absorption performance of the 3-DOF WEC under the one-directional waves in frequency- and time-domain considering both regular and irregular waves is studied. The results indicate that the multi-DOF WEC can extract more energy. In the end, the optimum PTO damping terms are investigated in the specified irregular wave, which can provide the foundation to design the generators.
Model description
The 6-PSS mechanism is shown in Figure 1, of which the platform has 6-DOFs including surge, sway, heave, roll, pitch, and yaw. The number of DOFs for the 6-PSS parallel mechanism can be calculated by using the amended Kutzbach–Grubler equation 25

where


6-PSS mechanism.
The platform can be considered to perform as the oscillating body; the PTO system can be placed in prismatic pairs which connect to a fixed device. The kinematics of the 6-PSS mechanism has been derived, and the equation between the platform motion and the heave motion of the joint at each leg has been established. 14 Numerous PTO systems for WECs have been applied in previous works, 26 such as rotary generators, hydraulic generators, and linear generators. Hydraulic generators or linear generators can be adopted in this mechanism.
The oscillating body in real waves has 6-DOF motions. In order to facilitate the research, here, we only study the power absorption performances of the WEC based on one-directional waves; nonlinear characteristics and the effects of other parts, such as the prismatic pairs and spherical joints, are not considered. Due to the symmetry, there are only 3-DOF motions consisting of surge, heave, and pitch. Here, the generators are supposed to be viscous damping terms which connect to the earth.
The simplified 3-DOF WEC is illustrated in Figure 2. The 3-DOF motions are surge (
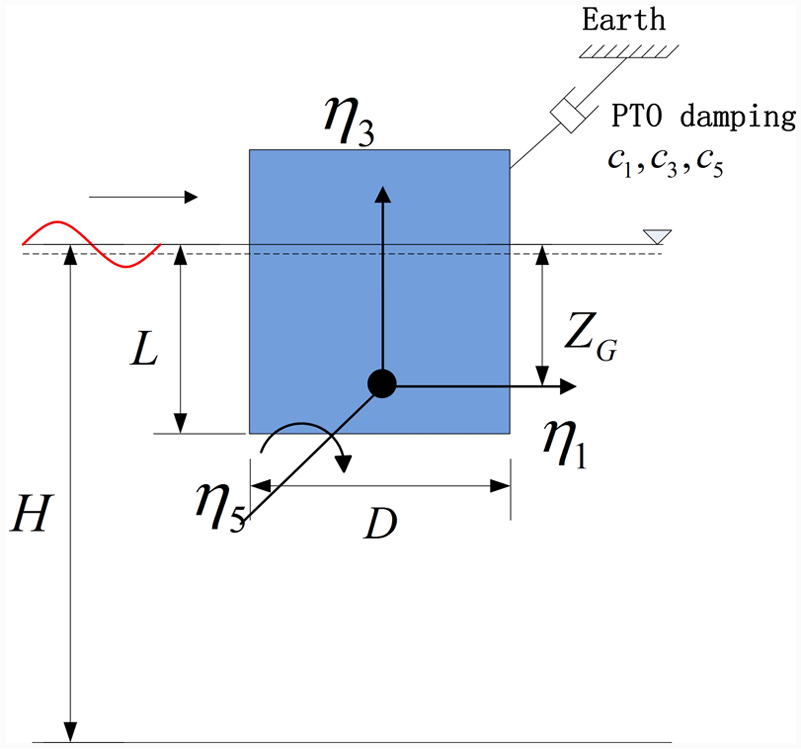
A simplified 3-DOF WEC to be considered for the dynamic models.
Numerical model
Frequency-domain analysis

The frequency dynamic model is established in equation (2). The hydrodynamic coefficients are calculated by the BEM software AQWA-LINE.




where
According to the deduction by J Falnes, 27 the dimension of the c1, c3, and c5 is selected approximately. Based on the cylinder specification assigned in Table 1, the hydrodynamic coefficients can be obtained by the software AQWA-LINE and the mechanical parameters can be calculated by equations (3)–(6). The displacement amplitudes of the oscillating body can be solved by equation (2), and then the absorbed power is calculated by equation (7). The results are shown in Figure 3, from which the resonance frequencies of surge, heave, and pitch motions are around 1, 0.9, and 1.2 rad/s, respectively. Furthermore, the power production in regular waves can be achieved

Cylinder specification.


Power absorption per wave amplitude (W/m) in surge, heave, and pitch motions by frequency-domain analysis.
Time-domain analysis

The time-domain dynamic model is established in equation (8) based on Cummins equation, where





Due to this, these terms in time-domain model are not convenient for analysis and design of motion control systems. The complexity and performance of different methods for replacing the convolution have been compared.
29
The retardation frequency response method is chosen in this article. Consider the parametric model of

The properties of retardation function are shown in Table 2. For detailed proof, refer to the appendix in the study of Perez and Fossen. 22 According to Table 2, the type of rational function can be simplified as

Properties of retardation function.

The corresponding frequency response

The unknown coefficients in equation (16) are marked as

According to the data from AQWA-LINE

The error between

With the least-squares method

According to the error criterion proposed by 30



When the coefficients are found, the matrix and vectors of state-space which approximate the convolution integral can be written as



With the method above, we obtain the following transfer function setting the order of the models to 3





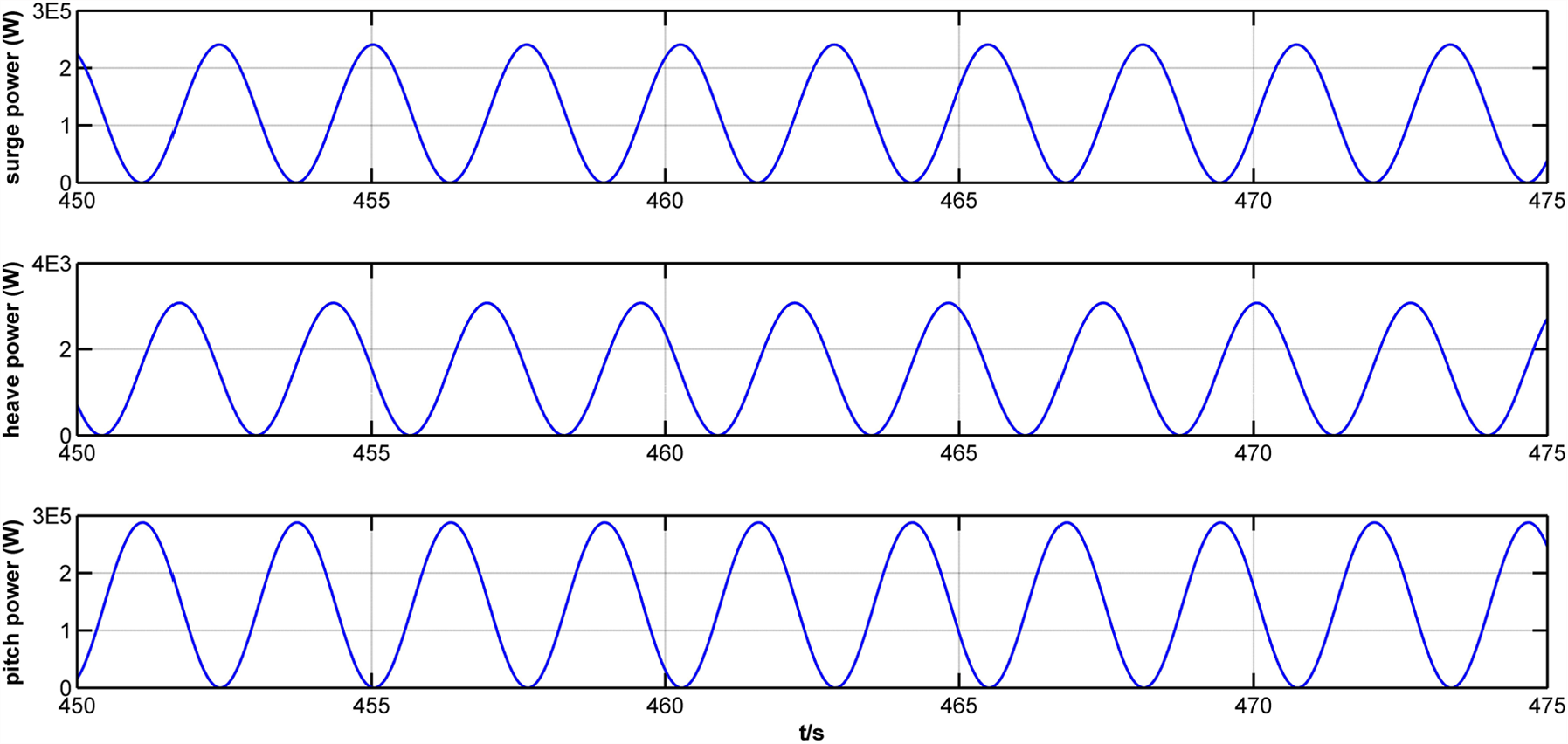
Power absorption by the time-domain analysis in surge, heave, and pitch motions (

Power absorption by the time-domain analysis in surge, heave, and pitch motions (
Real irregular waves may be represented as a superposition of regular waves. This study adopts the Pierson–Moskowitz spectral distribution which has been used 31

where

where the phase


Power absorption by the time-domain analysis (

Power absorption by the time-domain analysis (
The shape and mechanical parameters of the oscillating body and the selected PTO damping have great effects on the power absorption of the WECs. The power absorption varying with the PTO damping terms in each direction is displayed in Figures 9 and 10 on the premise of the specified cylinder and the irregular waves (

Power absorption varying with the PTO damping in the heave direction (

Total power absorption varying with the PTO damping in the surge and pitch directions (
Conclusion
In this article, the multi-DOF WEC based on the 6-PSS mechanism is proposed. Then, the dynamic analysis of the 3-DOF WEC under one-directional waves is presented in frequency- and time-domain. In the end, the power absorption with the change of the PTO damping terms in each direction is investigated.
Numerical results were obtained in the frequency model; we can predict the power production and the approximate resonance frequency in each DOF of WEC in regular waves. The frequency-domain identification has been used to replace the convolution term in Cummins equation. The instantaneous power absorption has been obtained by time-domain analysis, which indicates that it is significant to invent the multi-DOF WEC. Moreover, it is shown that the advantages with the converter in resonance with waves are evident in regular waves and not so obvious in irregular waves. The appropriate value of PTO damping terms has relative border range in irregular waves, which can be chosen according to the trends. Through optimization, the total power absorption in the three directions is close to 126 kW.
Footnotes
Handling Editor: Francesco Massi
Author Note
Weixing Chen is now affiliated to Shanghai QingTe Technology Co., Ltd.
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) received no financial support for the research, authorship, and/or publication of this article.