
Abstract
The Stewart platform is a typical parallel manipulator. It is used as a space docking mechanism whose requirement for movement scope is determinate. This article addresses the dimension synthesis of the space docking mechanism. First, this article compares the common indexes used to evaluate the performance of parallel manipulator. These indexes can mainly be divided into two types. The evaluation indexes based on the Jacobian matrix, including the singular value index, the manipulability index, and condition index, are derived from the Jacobian matrix of the manipulator, and the transmissibility indexes, such as pressure angle, transmission angle, and motion/force transmission index, lay emphasis on the power transmission ability of manipulator. This article proposes the global transmission index under determinate constraint of workspace on the basis of the previous transmissibility indexes to evaluate the performance of parallel manipulator whose workspace is determinate and movement is the combination of translation and rotation. And the optimization design of the manipulator is carried out by taking the global transmission index under determinate constraint of workspace into account. The detailed process of determining the optimal configuration for the Stewart manipulator used as space docking mechanism is presented. The optimal result is gotten, which has a large value of global transmission index under determinate constraint of workspace in the required workspace, and a simulation is carried out to verify the validity of the optimal result.
Keywords
Introduction
Almost 50 years ago, Stewart introduced a parallel actuated manipulator with 6 degrees of freedom (DOF), which is now popularly known as the Stewart platform. 1 The manipulator consists of six identical branched chains, each including a prismatic actuator, a spherical joint (three orthogonal intersecting revolute joints) connecting the branched chain to a base platform, and a universal or Hooke joint (two orthogonal intersecting revolute joints) connecting the branched chain to a mobile platform. It is commonly used in the occasion, such as the flight or driving simulators, vibration isolation platforms, space docking mechanisms, and parallel machine tools, for its high stiffness, compactness, load-to-weight ratio, and accuracy. 2 Hence, how to find a Stewart platform being capable of perfectly answering customers’ needs is of great importance, thus special attention must be paid to the optimization design for Stewart platform.
The essential problems for the optimization of the Stewart platform lie at the optimization object and the optimization algorithm, 3 among which the optimization object represents the performance evaluation indexes for the parallel manipulators, and the optimization algorithm is the mathematical method used to find the optimal solution based on the optimization object.
In the aspects of optimization object, the evaluation indexes, investigated from the 1970s, can mainly be divided into the following two types.
The evaluation indexes based on the Jacobian matrix, including the singular value index, the manipulability index,4,5 the local condition index (LCI), and the global condition index (GCI),6–8 are derived from the Jacobian matrix of the manipulator. The Jacobian matrix will be different with the change of the frame, so the evaluation indexes will be different under different coordinate systems. Besides, the Jacobian matrix describes the linear transformation relating the joints velocity of the manipulator to its end-effector velocity, which is the combination of translation and rotation, so with the change of the translation velocity unit and rotation velocity unit, the Jacobian matrix will also be different, leading to the change of the indexes value. Thus, those evaluation indexes share common drawbacks such as frame-dependent property and the unit inhomogeneous problem. 9 As noted above, the characteristic length is introduced to scale the relative importance of translational related terms to that of rotational, in this way, achieving the unit homogeneous of translation and rotation. But choosing a shorter length emphasizes translation terms, while conversely a longer length emphasizes rotation terms. 6
Another kind of evaluation indexes is the transmissibility indexes which pay special attention to the power transmission ability of manipulator. Since power is a scalar, which is independent of the coordinate system, and is the product of the linear velocity and force or the product of angular velocity and torque, respectively, the unit is homogeneous for translation or rotation whatever the units of velocity and force are. Thus, this kind of evaluation indexes is frame-free and unit homogeneous.
In this article, a new index called global transmission index under determinate constraint of workspace (GTIc) will be introduced, on the basis of the previous transmissibility indexes, to evaluate the motion/force transmissibility of a parallel manipulators whose motion is a combination of translation and rotation. Dimension synthesis for the Stewart manipulator used for space docking will be achieved using the GTIc.
The remainder of this article is organized as follows. The next section gives a rigorous analysis of the evaluation indexes based on the Jacobian matrix. Section “The transmissibility indexes” investigates the transmissibility indexes from the view of power transmission, the motion/force transmission index (TI) based on screw theory is presented, and the GTIc is proposed in this section. In section “Optimization of the Stewart manipulator used for space docking,” the optimization method for the Stewart platform, used for a space docking mechanism, with special requirement of the workspace including orientation and position is proposed, and the optimal solution is given for the special optimization mission. Section “Simulation analysis of the optimal result” presents the simulation to verify the validity of the optimal result. Conclusions are presented in section “Conclusion.”
The evaluation indexes based on the Jacobian matrix
The Jacobian matrix for Stewart platform
The Jacobian matrix 10 of the manipulator is the linear transformation relating the joints velocity of the manipulator to its end-effector velocity, which is found as follows

where
With the concept of virtual work,
11
the relationship between the actuator force

where
Derivation of the evaluation index based on the Jacobian matrix
The singular value index
The singular value index is proposed to analyze the drive capability of the manipulator. Assuming there is no singular point in the workspace, the Jacobian matrix

which leads to

If the Euclidean 2-norm is used, then equation (3) represents a unit hypersphere in the mobile platform velocity space
To better understand the physical significance of the relationship between the velocity ellipse and singular value, a brief discussion of the singular values of the Jacobian matrix follows. For an arbitrarily invertible matrix

where

Let

Hence,
A classical geometrical interpretation of this relationship is presented for the two-dimensional (2D) case as shown in Figure 1.

The geometrical interpretation of the mapping relation for two-dimensional case.
The largest value of the length of half axis velocity ellipse is equal to the value of the maximum velocity of these prismatic actuators when the generalized velocity of the platform is unity. And through the above analysis, it is obvious that the maximum singular value of the Jacobian matrix is equal to the length of the longest half axis of velocity ellipse. Therefore, the maximum singular value
When the velocity of the mobile platform is given, the less the maximum singular value
Manipulability index
The concept of the manipulability index proposed by Yoshikawa4,5 is also derived from the velocity ellipse. It is usually claimed that the shape and size of the velocity ellipse represent the amplifying ability of the manipulator between the platform velocity space and the joint velocity space. And the lengths of the axis of the ellipse, which are equal to the singular values of the Jacobian matrix, respectively, are considered as a measurement of the velocity amplification coefficient. In order to evaluate this amplifying ability, Yoshikawa introduced the manipulability index and the volume of the velocity ellipse, for robots as follows

In fact, the manipulability can also be expressed as the product of the singular value of the Jacobian matrix

Less manipulability index means less volume for the velocity ellipse, which will lead to a poor amplifying ability for manipulator. Hence, the manipulability index can be used to optimize the configuration of a manipulator.
Condition number index
The condition number index was first introduced for use in the field of serial robots and extended to the field of parallel manipulators gradually. 13 As we all know, the maximum and minimum lengths of the axis of velocity ellipse are equal to the maximum and minimum amplification coefficients between the platform velocity and joint velocity, respectively. The closer these lengths are, the closer the velocity ellipse is to a spatial hypersphere and then the more isotropic the manipulator is. In order to evaluate this closeness, the condition number, the ratio of the maximum and minimum singular value of Jacobian matrix, is introduced for parallel manipulator as

where

where the scope of LCI is
As we all know, the LCI will vary at different positions and orientations, so the index can only be used to evaluate the performance of a manipulator when the position and orientation are determinate. The global condition index (GCI) is proposed to evaluate the global performance in the entire workspace of a parallel manipulator, which is defined in the following form

where W is the workspace of the manipulator.
In fact, GCI is the average value of LCI in the whole workspace of a manipulator. Thus, the GCI can be used to evaluate the global performance of a manipulator. The better performance of isotropy is connected with a larger number of GCI. Besides, the condition number is also commonly used to evaluate the singularity,14–16 dexterity,3,6,17 and accuracy 9 of a manipulator.
Discussion of the evaluation indexes based on the Jacobian matrix
All these above indexes are derived from the concept of velocity ellipse and can be used to evaluate the performance of a parallel manipulator. The singular index mainly pays attention to the largest length of the velocity ellipse half axis, while the manipulability index represents the volume of the velocity ellipse, which is the product of all the length of the velocity ellipse half axis. So, there is no value bound for the two indexes, in other words, given the value of index, we cannot judge if the performance of the manipulator is good or bad. However, LCI and GCI are bounded between zero and one, so the performance of the manipulator can be easily judged from the number of the index. Therefore, the condition number index has been commonly accepted to evaluate the performance of a manipulator.
However, all these indexes share some common drawbacks. The first one is the frame-dependent property. Since the Jacobian matrix is dependent to the frame, when the reference frame changes, the Jacobian matrix will change, leading the change of these indexes.
The second drawback is the unit inhomogeneous problem, that is, when the velocity of the platform is a mix of rotational and translational velocities, the units of the rotational and translational velocity are different, and this will lead to different Jacobian matrices under different systems of units, thus resulting in different values of evaluation index under different systems of units. In order to solve the problem, the characteristic length is introduced to unify the rotational and translational velocities. But it is obvious that the indexes will accordingly vary with the change of the characteristic length. So, it is not intuitive for user to evaluate a manipulator, because they will get different results to the same manipulator with the change of the characteristic length and reference frame.
The transmissibility indexes
The transmissibility indexes describe the transmission ability from the joint force to the platform movement. The physical significance of the transmissibility is very intuitive. The discussion about the transmissibility will begin from the planar linkage.
Transmission angle and power coefficient for planar linkage
The concept of transmission angle is easy to be understood. Take the planar four-bar mechanism, shown in Figure 2, for example. If AB is the input link, the force exerted on the output link CD is transmitted through coupler link BC. Ignoring inertia force of link, the coupler link BC is a two-force bar, that is, the force in the link BC is the pour tension or pressure and is directed along BC as

A planar four-bar mechanism.
For the given unit joint force

In fact, the power coefficient is the cosine value of the smaller angle between the unit joint force
When the transmission angle is
The mathematical theory foundation of screw theory
To spread the concept of the transmissibility from planar linkage to spatial mechanisms, the theory foundation of the screw theory is a must. It has been commonly accepted that the screw theory is an efficient mathematical tool for the study of spatial mechanisms since the screw can unify the force and torque or translation and rotation in one expression. And the movement of the spatial mechanism is a combination of rotation and translation, and the generalized force applied on the spatial mechanism is a combination of force and torque. In this article, the screw theory is employed as the mathematical tool to analyze the transmissibility of the spatial parallel mechanisms.
Twist screw and wrench screw
A screw can be used to describe the movement of a rigid body, usually called twist screw, and also can be used to describe the generalized force applied on a rigid body named wrench screw. As shown in Figure 3, the movement of a rigid body can be represented by a twist screw as

where

where

Twist screw and wrench screw of rigid body.
The generalized force exerted on a rigid body can be expressed by a wrench screw as

where

where
Reciprocal product and reciprocal screw
The concept of reciprocal product was first introduced by Ball.
18
The reciprocal product between the twist screw

Substituting equations (14) and (16) into equation (18), we can obtain

The physical significance of the reciprocal product is the instantaneous power generated by the wrench screw

Then, the instantaneous power generated by the wrench screw on the rigid body which is moving along the twist screw is zero. In this situation, the wrench screw does not do any work for the body no matter how large the force and the torque of the wrench screw are, thus not changing the moving status of the rigid body. Then, the wrench screw is usually called the reciprocal screw of the twist screw, and the twist screw is also the reciprocal screw of the wrench screw.
TI
Transmission wrench screw and output twist screw
For most mechanisms, the prime function is to transmit motion from the input joint to the output joint and the end effector, so the motion of the output joint and the end effector caused by the movement of the input joint represented in screw format is called the output twist screw (OTS). Similarly, the external load exerted on the output joint and the end effector is transmitted to the input joint, so the internal wrench caused by the external load represented in screw format is called the transmission wrench screw (TWS). 19
TI
Similarly, with the concept of the power coefficient for planar linkage, which is the ratio of the actual power and the maximum power generated by the unit joint force and velocity, the definition of TI for spatial mechanisms is the ratio of instantaneous power and the maximum power generated by the unit TWS and OTS on a rigid body. Hence, the TI between TWS and OTS can be represented as

When the two screws, TWS and OTS, are given, their pitch,

where
Discussion of TI
Compared to the evaluation index based on the Jacobian matrix, the TI completely solves the drawbacks such as frame-dependent property and unit inhomogeneous problem. Since the mathematical tool, the reciprocal product of screw, used in the process to calculate the TI is frame-independent,19,23,24 the proof can easily be found in the screw theory. Besides, the substance of the concept of TI is the power transmission coefficient. No matter for translation or rotation, the power is the product of the linear velocity and force or the product of angular velocity and torque, respectively, so the unit is homogeneous for translation or rotation whatever the units of velocity and force are.
GTIc
In order to evaluate and optimize the spatial mechanism whose movement is a combination of rotation and translation and workspace is determinate, the orientation average transmission index (OATI) and the GTIc are proposed here. Compared to the previous global evaluation indexes, which are commonly obtained by calculating the average value of the evaluation index in the translational workspace when keeping the orientation constant, or calculating the average value of the evaluation index in the rotational workspace when keeping the position constant, the GTIc proposed in this article can evaluate the transmissibility in translational and rotational direction simultaneously. The OATI is defined as the average value of TI in the orientation workspace when keeping the position constant as follows

where

where
Optimization of the Stewart manipulator used for space docking
Based on the above analysis, this article uses GTIc for spatial mechanism to carry out the optimization of the Stewart manipulator used for space docking for its frame-independent and unit homogeneous property. The optimization procedure is shown below.
Step 1: determine the optimization object, constraint condition, and optimization parameters
For the optimization mission of space docking mechanism, the Stewart manipulator whose structural sketch shown in Figure 4 is used here. As is known to us, the Stewart manipulator should have properties that are as homogeneous as possible; therefore, the manipulator should possess high degree of geometric symmetry. To achieve this symmetry, the six actuator attachment points on the base,

Structural sketch of Stewart manipulator.
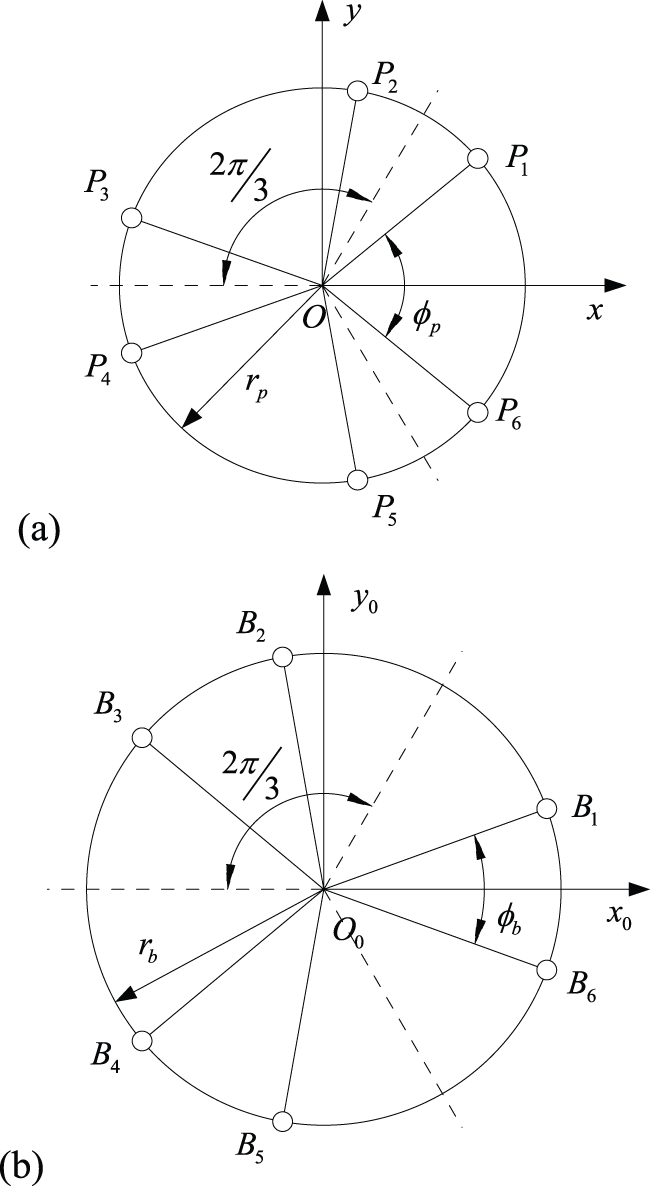
Actuator attachment points on (a) platform and (b) base.
For the space docking mechanism, the moving platform circle must conform to the international standard, so
Movement scope of the platform.

Therefore, this optimization mission can be concluded as:
Optimization object: the GTIc in the moving scope of the docking mechanism is as large as possible;
Constraint condition: the minimum value of the length of prismatic actuator is 0.15 m, the radius of the platform circle is 0.363 m, and the workspace of the docking mechanism must conform to Table 1;
Optimization parameters: the optimization parameters of this problem are the radius of the base circle and the separation angle between adjacent actuator attachment points on the platform circle and the base circle, which can be represented as
Step 2: calculate the TWS of the branched chain of the docking mechanism when the configuration, position, and orientation are given
The branched chain of the docking mechanism is universal-prismatic-spherical (UPS) kinematic chain. The TWS of the branched chain can be obtained when the prismatic actuator is locked, thus the branched chain becomes a U-S kinematic chain shown in Figure 6. Then, the TWS of the spherical pair

The UPS kinematic chain.
The spherical (S) pair can be considered as a combination of three independent rotation (R) pairs with intersecting axes. The FTSs of the S pair can be expressed as

In this way, we can obtain the following equation for the

Since the three vectors
The universal (U) pair can be considered as a combination of two independent R pairs with intersecting axes. The FTSs of the S pair can be expressed as

In this way, we can obtain the following equation for the

Since the two vectors
Therefore, the TWS of the

where
Step 3: obtain the OTS of the motion of the platform
When the Stewart manipulator is only driven by prismatic actuator

where


The TWS and OTS on the platform.
Equation (31) can represent five equations for

And then introduce the following equation

Combining equations (32) and (33), one can obtain

where

Since

Assuming

where

Comparing the coefficient of equations (36) and (37), we can obtain

where

Thus, we can obtain

With this, we can get the OTSs of the motion of the platform.
Step 4: figure out the TI when the TWS and OTS have been gotten
From equations (21) and (22), we can get that the key to calculate the TI when the TWS and OTS are given is to get the distance from the characteristic point of the TWS to the axis line of the OTS

where

Substituting the result of equation (41) into equation (21), the TIi of the

Step 5: fathom out the OATI when the configuration and position of the manipulator are constant
Here, assuming the configuration of the manipulator is

The distribution atlas of the TI while fixing
To get the changing characteristic of the distribution in the orientation workspace, we will change the position of the Stewart manipulator to

The distribution atlas of the TI while fixing
Then, we can get the OATI when the configuration and position of the manipulator are given according to the distribution atlas and equation (23).
Step 6: work out the GTIc when the configuration of the manipulator is given
To calculate the GTI in the whole workspace of the manipulator, we must determine the appropriate zero position first. Here, we also assume the configuration parameter of the manipulator is
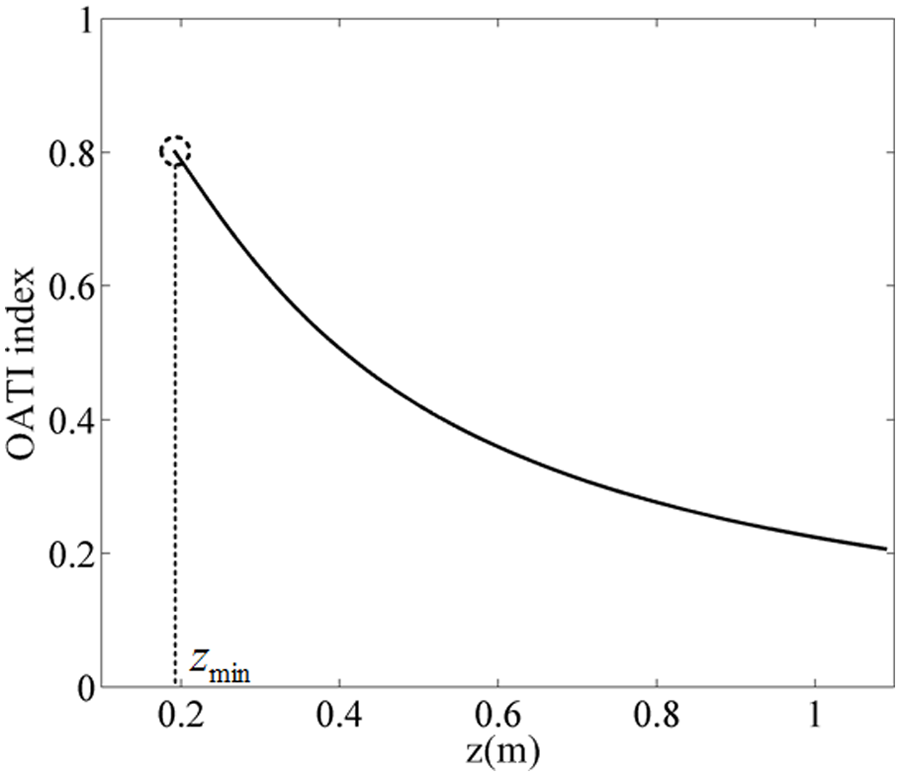
Changing characteristics of OATI with the change of position z.
In Figure 10,
Then, according to the zero position and the moving scope of translation, we can get the distribution atlas of the OATI in the position workspace as shown in Figure 11.
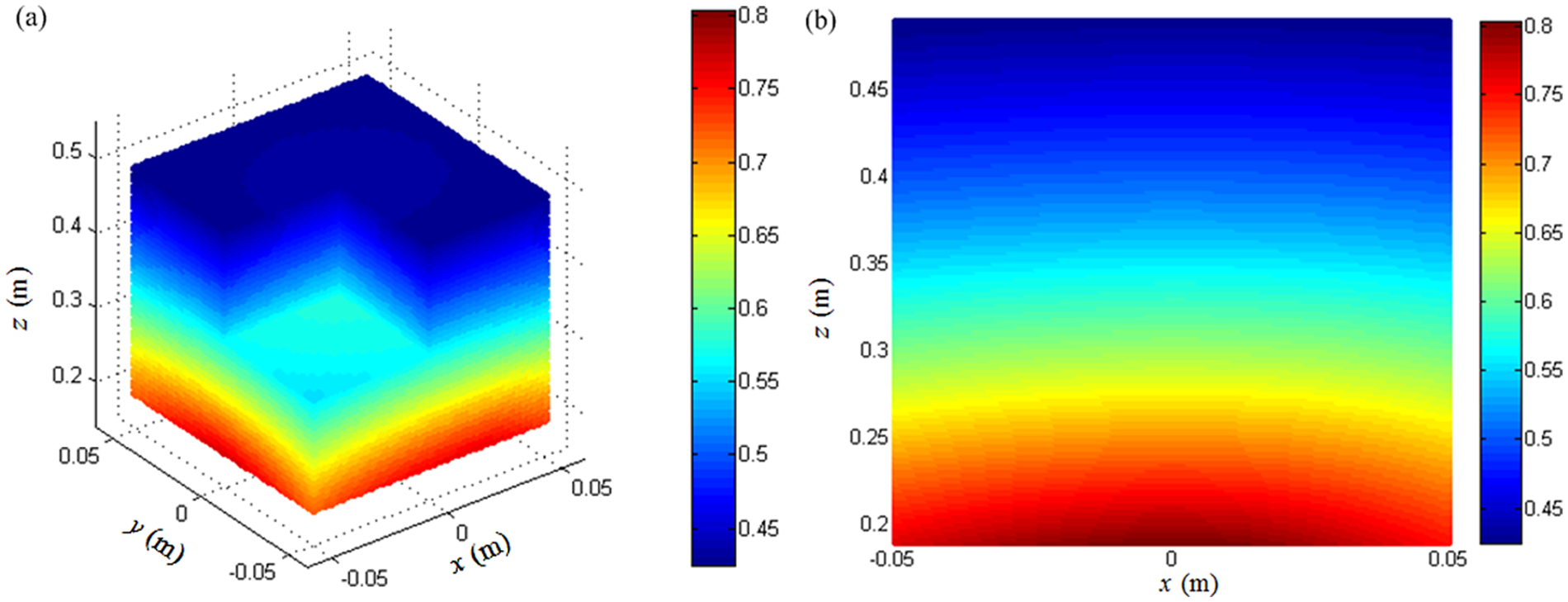
The distribution atlas of the OATI when
Therefore, we can get the GTIc of the manipulator when the configuration of the manipulator is given according to the distribution atlas of the OATI and equation (24).
Step 7: seek the optimal configuration for manipulator based on the GTIc
The exhaustive method is used in this article to seek the optimal configuration. The scope of

The changing characteristics of the GTIc.
Through Figure 12, we can find the optimal configuration for the Stewart platform whose movement scope as in Table 1 is
Simulation analysis of the optimal result
After finishing the optimization of the Stewart manipulator, a contrast experiment needs to be carried out to verify the validity of the optimal result. For the Stewart manipulator, to compare the transmissibility, we can drive one prismatic actuator using identical force and for the same time, and keep others locked, and then measure the kinetic energy of the mobile platform. In this way, the kinetic energy represents the energy transmitted from actuator to the mobile platform and can be used as the basis of the comparison.
The contrast experiment is carried out between two models, one is the optimal result whose configuration is
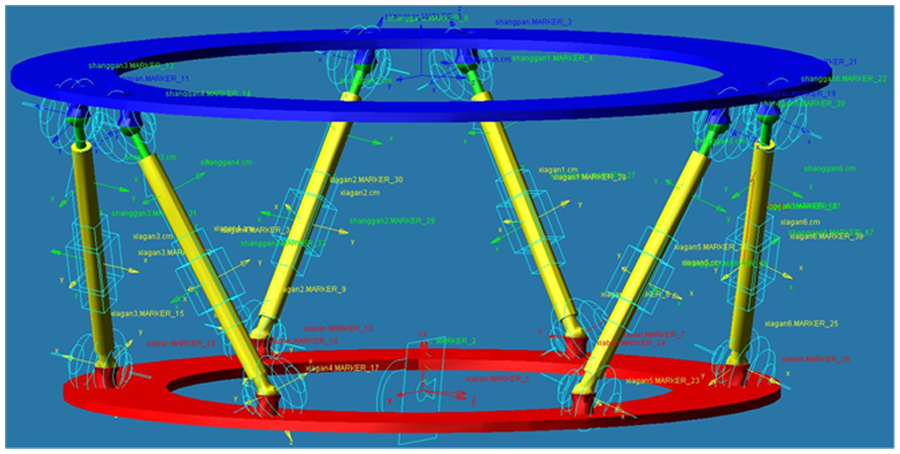
The simplified model in Adams before optimization.

The simplified model in Adams after optimization.
Keep five prismatic actuators fixed and add 5-N driving force on the other actuator for 3 s. Measure the change of the kinetic energy of the mobile platform, as shown in Figure 15. It is obvious that the kinetic energy increase speed of the optimal result is greater than that of the other configuration. Thus, the manipulator after optimization has a better transmissibility.
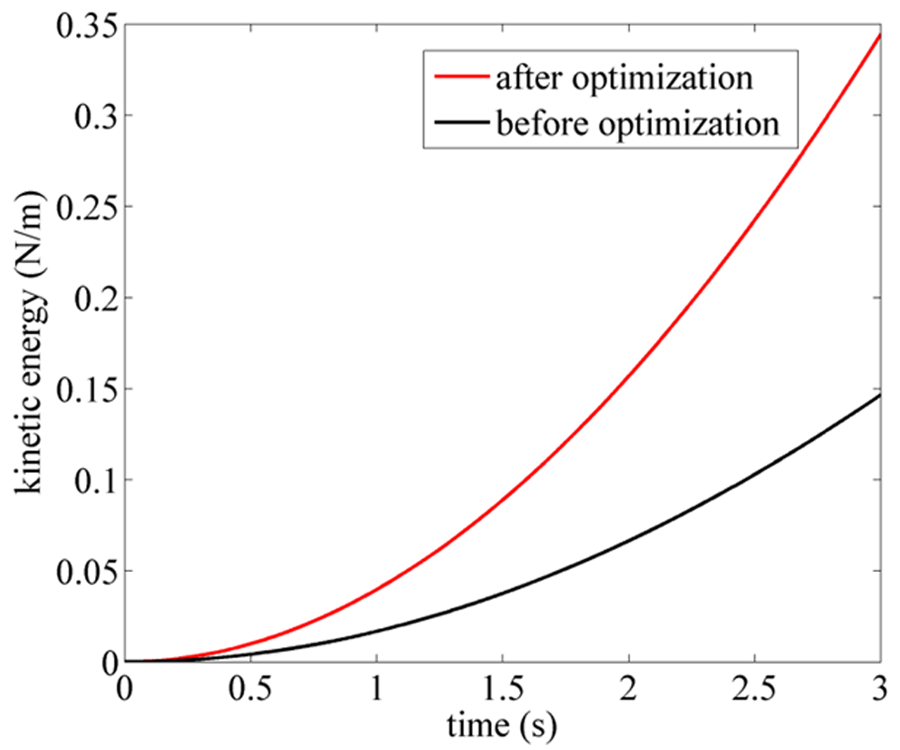
The change of kinetic energy.
Conclusion
GTIc is proposed and the dimension synthesis method for Stewart manipulator used for space docking is introduced in this article. This article carries on a detailed research about the evaluation indexes for parallel manipulator and analyzes the merits and the demerits of these indexes. And then the GTIc is proposed based on the TI which has the advantages of frame-independent and unit homogeneous property. Finally, the exhaustive method, which considers all the possibilities, is used to find the optimal configuration of the docking mechanism which has the largest value of GTIc. And the simulation is carried out to verify the validity of the optimal result. The GTIc and the optimization method introduced in this article can also be applied to other mechanisms.
Footnotes
Handling Editor: Yangmin Li
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by the General Program (Grant No. 51675117), the Major Research Plan (Grant No. 91648201) and the Foundation for Innovative Research Groups (Grant No. 51521003) of the National Natural Science Foundation of China, and China Postdoctoral Science Foundation (Grant No. 2014M561338).