
Abstract
Because of the convenience and the quickness, electric bikes gradually become the main travel mode of urban resident in China, and electric bike–car mixed flow becomes the new characteristics of urban traffic flow. But their role in mixed traffic flow and their effects on cars have become important problems for transportation designers. Mixed traffic flow simulation model provides the designers an effective tool to acquire the relation between flow and density in a new design scheme, achieve solutions for optimal design features before implementation, and help to make the design more rational. Based on the electric bike–car mixed flow characteristics and social force model, this article proposes a microscopic model which can represent the behavior of electric bike–car mixed flow in road segment. First, the inner and outer forces determining the movement mechanism of electric bikes and cars were analyzed, respectively; second, we developed a modified social force model to describe the electric bikes and cars behaviors; third, the social force model was modified and extended for mixed traffic flow by considering the interactions between electric bikes and cars, lane-changing behavior, and conflict avoidance behavior. The interaction parameters of the social force-based model for electric bike–car mixed flow are estimated using empirical data. The established microscopic model can be used to estimate critical flow of separating vehicle and electric bike and determine proper electric bike lane width according to different electric bike requirements by simulating.
Introduction
Unlike the traditional bicycle, the electric bike is designed to allow the rider to use it at a faster speed, so it provides the rider more rapid tool for short trips. So, the electric bike–car mixed flow gradually replaces the bicycle–car mixed flow to be universal phenomenon of urban transport system in China. Although there are millions of electric bikes in China, many related traffic accidents have been caused. Attention paid to the electric bikes is still not enough, and policies for electric bikes are still lacking.
Besides, existing studies focused more on the bike–car mixed flow, and little attention was paid to the electric bike–car mixed flow. Shan et al. 1 modeled the relationships among density, flow rate, and speed based on the observed data. They used the proposed model to determine bike lane width under the condition of different bicycle traffic demand. Lv et al. 2 and Wang 3 collected the traffic data from the trajectories of mixed traffic flow and modeled the relationship between density and speed of bikes by using regression analysis. Zhou 4 derived the relationship between the flow rate of bikes using motor lane and the flow rate of all bikes based on a field survey. Kroll and Ramey 5 studied the impacts of bikes on the cars, and then draw a conclusion that cars would slow down when they passed by bikes. Pan and Kerali 6 analyzed the impacts of non-motorized traffic flow on vehicle speeds. A linear relationship was observed between motorized vehicle speeds and non-motorized traffic flow under a range of motorized traffic flow volumes. Guan et al. 7 analyzed the effects of bikes on the traffic capacity of cars. These studies all focused on the bikes and quantified the impacts of bikes on the cars by analyzing the relationship between density and speed based on the empirical data. But these methods need a large amount of considerable effort and time to get data. Micro-simulation methods can overcome these shortcomings.
Micro-simulation can reproduce many complex traffic phenomena, and it is an effective method to assess new traffic design scheme. Over the past decade, many micro-simulation models were used to analyze the interaction mechanisms of mixed traffic flow, such as aerodynamics model, rule-based models, and force-based models. Cellular automata (CA) and social force model (SFM) are two frequently used methods, and their effectiveness have been fully verified. In CA model, the interaction space is divided into discrete cells, and each cellular obeys to the same predefined rules for their movements. Jiang et al. 8 simulated the bike traffic flow using the CA model, and they verified the effectiveness of the proposed model by comparing the simulated results with observed space–time movement mechanism. Jin et al. 9 developed a modified multi-value CA model to simulate bike traffic flow, and they took electric bicycles into consideration. Nan et al. 10 simulated the electric bike–bike mixed traffic flow using modified CA model, and the proposed model allowed the individual (electric bike and bike) to have different speeds. However, there existed separated electric bike lane and bike lane which are inconsistent with the facts because the electric bikes and bikes shared the same lane in fact. Existing CA models focused on simulations of bike traffic flow, electric bike–bike mixed traffic flow, and bike–cars mixed traffic flow as bikes and electric bikes have remarkable differences, such as speeds and shapes. The electric bike has higher speed, larger shape, and mass, so the electric bike riders prefer to change lane into motorway. These characteristics cause more intense and unpredictable interactions between electric bike and cars. Although CA models are efficient in simulating mixed traffic flow, it has a disadvantage which is hard to ignore. Jasti and Higgs 11 indicated that the CA model is “discrete in nature,” so it is not suitable to model the continuous interaction of the mixed flow, that is, they may not efficiently reflect an unexpected macroscopic behavior.
Because the CA model simulates the individual by define speed and location evolution rules, it can be used to simulate the behaviors of individuals. But, the accuracy of the simulation is determined by the cellular space division, so the simulation will be more accurate when the cellular space is divided into more cells. But, because the cellular space cannot be divided infinitesimally, the simulated speeds and locations of individuals have many similarities. Similar to the CA model, the SFM is established to simulate the pedestrian flow, but the SFM is a continuous model. So, the individuals can change the magnitude and direction of their speeds according to the resultant force acted on the individuals at any time, so the simulated results are more consistent to practical traffic flow. Considering more realistic behaviors, existing force-based models have been developed by modifying the SFM established by Helbing and Molnar 12 based on Newton’s second law of dynamics. The SFM model quantifies interactions between pedestrians and outside environment as repulsion force and attraction force, and then updates pedestrians’ positions in each simulation time to simulate pedestrian movements. SFM can reproduce successfully many pedestrian collective phenomena such as lane formation,12,13 oscillations at bottle-necks, 12 faster-is-slower effects,14–16 and clogging at exit doors. 13 On the basis of basic SFM, Helbing et al. 17 explored the interactions between pedestrians and cars in crossing sections, besides, they modeled and simulated the interaction behaviors. Pretto et al. 18 combined the rule-based models and force-based models to analyze and model the interactions between pedestrians and cars at crossing points. Schönauer et al. 19 used SFM to formulate pedestrian behaviors and analyze the interactions of pedestrians with cars. They used a single track approach to model vehicle dynamics, and adopted the game theoretic approach to avoid pedestrians and vehicles conflicts in shared space conditions. Li et al. 20 took the required space and the critical gaps with turning vehicles into consideration, and they proposed a stop/go decision mechanism to avoid conflict. Anvari et al. 21 modeled pedestrian-car shared space via rule-based SFM. Li et al. 22 indicated that the simulated fundamental speed–volume diagram of the mixing traffic based on the SFM is closer to the actuals than CA model.
In summary, although many theoretical models have been proposed to explore the laws of mixed traffic flow, existing studies paid little attention to the electric bikes. Different from the bikes, the drivers’ view of the electric bikes is similar to that of the vehicles. So, the electric bike drivers tend to change lane more frequently, and they prefer to move into the vehicle lane when the vehicle lane is not occupied because the electric bikes have faster speed and more flexible movement than the bikes. Besides, the following phenomenon of the electric bikes traffic flow is more significant than the bike traffic flow. Currently, considering the complex interactions of electric bikes and vehicles, there are no applicable simulation models which can be directly applied to the electric bike–car mixed traffic flow in road. Besides, there are more loopholes in the law for the management of electric bikes. Hence, there is a need for a simulation model to explain the laws of electric bike–car mixed traffic flow.
This article presents a modified SFM which is capable of reproducing the behavior of electric bikes and cars in road, and it is implemented in traffic design scheme assessment. The SFM can effectively illustrate each individual traffic behavior in the mixed traffic flow. Based on the basic SFM, a modified and extended SFM of electric bike–car mixed traffic flow in road segment areas is established. The essential mutual interferences of the car and the electric bike in the mixed traffic flow are analyzed. The speeds of electric bikes and cars are compared with the real data, and lane-changing behavior of electric bikes and travel times of vehicles are also analyzed. Simulated results indicate that electric bike–car mixed flow simulation model can be adopted to reveal the mechanism of electric bike–car mixed traffic flow movements. In this article, SFMs of single electric bicycle traffic flow, single vehicle traffic flow, and electric bike–car mixed traffic flow are presented in sections “SFM of electric bike traffic flow,”“SFM of vehicle traffic flow,” and “SFM of electric bike–car mixed traffic flow,” respectively. In order to verify the effective of the model, a case is analyzed in section “Calibration and simulation.” The conclusions are presented in the final section of the article.
SFM of electric bike traffic flow
The SFM defines the interactions between pedestrians, other traffic participants, and traffic environment as inner and outer forces, and formulates these interactions. The basic SFM contains four basic forces exerted by other individuals and obstacles when they move in a scenario: driving force toward destination
The modified SFM in this article contains five social forces,


Here,
In equation (2),

Driving force of electric bike
The driving force of electric bike


where
Interaction force between electric bikes
Unlike the bikes, electric bikes have higher speed and faster acceleration, so the behavior mechanism of the electric bikes is similar to the vehicles. Electric bikes can change lane into the vehicle lane, and the following electric bikes will follow the vehicles ahead to reduce the interactions with other vehicles and electric bikes by changing speeds quickly. The electric bikers are influenced by other electric bikes within their visible ranges when they travel in the road segment. For example, when one electric bike approaches to other electric bikes, other electric bikes will produce a repulsive force to it, and it has to slow down to avoid interactions and collisions. The interaction force between an electric bike (





where
Similar to Helbing et al.,
17



Electric bikes following characteristic
Empirical observations of electric bike traffic flow in practice show that electric bikes merge into assumed lanes created by electric bikers. This becomes remarkable when a number of electric bikers move in the same direction in road segment. In order to travel at a larger speed, the rear electric bikes will move toward the destination by following the electric bikes ahead. In this way, the rear electric bikes will reduce many conflicts with other electric bikes. When the electric bikes ahead slow down, the rear electric bikes will also slow down; when the electric bikes ahead accelerate, the rear electric bikes will also accelerate.
All these interactions mean that the electric bikes ahead have extra forces on the rear electric bikes. However, the following forces acted by the electric bikes ahead do not exist all the time. They arise only when the distance between the two cars locates in a certain range. As shown in Figure 1, when the horizontal distance

where

Electric bikes following force diagram.
Similar to


The anisotropic factor

Conflict avoiding characteristic
Electric bikes will avoid conflicts with electric bikes and cars by changing speed and moving direction. At present, although there are a lot of collision avoidance model, the models and relevant parameters cannot be applied to simulate electric bikes. The relevant parameters should be re-calibrated. Asano et al. 23 assumed that the subject pedestrian will adopt a giving-way maneuver to avoid collisions with nearest pedestrian if a pedestrian steps his/her private sphere, that is, a potential collision is going to occur. Two common conflicts are shown in Figure 3(a); however, not all the conflicts turn to collision, so we should judge whether the conflicts are valid. As described in the study of Zeng et al., 24 the time to conflict point (TTCP) can be used to identify whether the conflict is valid or not. TTCP represents the desired time to pass the conflict point at the two pedestrians’ current speeds and directions.

Force of individual avoiding conflict: (a) invalid and valid conflict and (b) force from individual evasive behavior.
Similar to pedestrians, the conflicts between electric bikes should also be identified. Figure 3(a) is also used to illustrate the conflicts between electric bikes. The TTCP for the subject electric bike


where

Once the conflict is identified to be valid, the subject electric bike
The technological process of direction and speed changing to give way is shown in Figure 4. The adjusted speed vector


where

Flow chart of individual collision avoidance.
Therefore, the giving-way maneuver can be presented by an individual force

Interaction force between electric bikes and boundaries
In this section, the boundaries are divided into two categories (real boundaries and virtual boundaries). Electric bikes cannot crossed the real boundaries because they are restricted to move in lanes by the curbs. However, they can cross through the virtual boundaries, for example, they can change lane by crossing the vehicle lanes. So, a modified force from the boundaries model is established to explain this phenomenon. In this article, we focus on the electric bike–car mixed traffic flow separated by the lane line, and the electric bikes move in the electric bike lane generally. When the electric bikes move in the electric bike lane, their motions are influenced by the boundaries. In the SFM, electric bikes and cars are restricted by the lane lines, curbs, and central strip, but these boundaries can be divided into the real boundary (curbs and central strip) and the virtual boundary (lane lines). So, we analyze the interaction force between electric bikes and two kinds of boundaries, respectively.
The real boundaries force on electric bike
The real boundaries cannot be crossed through the electric bikes and cars. The electric bikes and cars keep a safe distance from the real boundaries. The forces which the boundaries act on the electric bikes increase exponentially and they become infinite when the distance between the real boundaries and electric bikes is less than the safe distance

Here,
The virtual boundaries force on electric bike
Generally speaking, electric bikes keep walking inside the electric bikes lane, and the lane boundary prevents electric bikes from stepping into vehicle lane. As shown in Figure 5, when moving in the electric bikes lane, the electric bikes will keep a safety distance from the boundary, that is, a repulsive force

Here,

The virtual boundaries force on electric bike.
SFM of vehicle traffic flow
Similar to the electric bikes, the basic SFM of vehicles contains driving force toward destination

The formula of

Driving force of vehicle
Similar to the electric bike, the driving force of vehicle


where
Different from the pedestrians, because vehicles are restricted in the vehicle lane, and their desired destinations focus on the middle of the vehicle lane. However, the desired destinations of pedestrians are random. So, the distribution model of vehicles’ desired destinations is modified. The desired speed of vehicle is determined by its destination. The desired destination distribution model of vehicle is proposed to describe the destination distribution of vehicle. Generally, the vehicles prefer to move ahead along the midline of vehicle lane, so it is assumed that the probability density function of desired destination distribution is established using Gaussian distribution as shown in equation (29)

where
Interaction force between vehicles
Similar to the electric bike, the vehicles are influenced by the other vehicles within their visible ranges. The interaction force between vehicle (




As shown in Figure 2, the leading vehicle only has influence on the vehicle behind


Vehicles following characteristic
Generally, the vehicles only move in the vehicle lane, and one vehicle lane transect allows one vehicle to cross at one moment. Compared with electric bikes, the vehicles are queue in one lane. So, the following characteristic of vehicles is more remarkable, and it becomes more noticeable with the cars increasing. Anvari et al. 21 indicated that the social force may cause the behind vehicle to overtake rather than follow the leading vehicle. If the following characteristic is not taken into consideration, the behind vehicle with a higher speed will attempt to overtake the leading vehicle when the leading vehicle decelerates rather than slowing down too. Similarly, the behind vehicle with a lower speed will attempt to speed up when the leading vehicle accelerates rather than keeping its current speed.
To model the following behavior, Helbing and Tilch
25
proposed a force

However, the force

Interaction force between vehicles and boundaries
In this article, we focus on the electric bike–car mixed flow with one vehicle lane and one electric bike lane. So, the electric bike can go through the lane line to the vehicle lane, but the vehicle cannot move into electric bike lane. Different from the interaction force between electric bike and boundaries, both the real boundaries and the virtual boundaries cannot be got through by the cars. The cars keep a safe distance from the boundaries. The forces which the real and virtual boundaries act on the cars increase exponentially and they become infinite when the distance between the real boundaries and cars is less than the safe distance. Both the social forces from virtual and real boundaries can be calculated by equation (39)

SFM of electric bike–car mixed traffic flow
Features of electric bike–car mixed traffic flow are much more complex than single electric bike or single vehicle. Compared with the bikes, electric bikes can change lanes frequently, and they prefer to choose the lane without being occupied by other cars and electric bikes. Changing lanes of electric bikes have great influence on the vehicle traffic flow, so a changing-lane force model of electric bikes is developed in this section to improve the simulation model of the mixed traffic flow. When an electric bike moves into the vehicle lane, if the vehicle behind do not decelerate immediately, a collision will happen between the electric bike and the vehicle. Even if the car behind is far from the changing-lane electric bike, the changing lane may cause the cars flow to slow down to avoid electric bikes, and changing lane also reduces vehicle lane capacity. The more frequently the electric bikes change lane, the more the vehicle lane capacity reduces. The interference severity between the vehicle and electric bikes can be measured by the lane-changing times. The interactions between electric bike and vehicle can be divided into two stages, electric bike rides into the vehicle lane and electric bike rides back the electric bike lane.
Electric bike rides into the vehicle lane
Electric bikes have more freedom to move, and the electric bikes may ride into the vehicle lane, so electric bikes will influence vehicles seriously if urban road segments are not separated physically. When the electric bikers ride into the vehicle lane, the vehicles behind will decelerate to avoid collision with electric bikes. The electric bike will act as a repulsive force
As shown in Figure 6, when meeting the conditions shown in equation (40), the electric bike will attempt to change lane into vehicle lane

where

Schematic of electric bike changing lane into vehicle lane.
How to realize changing lane into vehicle lane? This article proposed to add a changing-lane force to achieve the goal. When meeting the conditions shown in equation (40), the lane line generates a changing-lane force

Here,
Meanwhile, after the electric bike having changed lane, the interaction force

As shown in Figure 2, the changing-lane electric bike only has influence on the vehicle behind


Electric bike rides back the electric bike lane
As shown in Figure 7, when meeting the conditions shown in equation (45), the electric bike will attempt to change lane into electric bike lane again.

where

Schematic of electric bike changing lane out vehicle lane.
When meeting the conditions shown in equation (45), the lane line generates a changing-lane force

Calibration and simulation
Calibration of model parameters
The established SFM includes various parameters. However, many parameters are not included in the existing SFM. What’s more, some parameters contained in existing SFM are used to simulate pedestrians, so they are not for electric bikes and vehicles. So, all these various parameters should be re-calibrated. Comparing the simulated and observed speed–density relationship is a common method used to calibrate the model parameters of the SFM. Seyfried et al. 26 had calibrated the model parameters by comparing aggregate outcomes such as speed–density relationship. Helbing et al. 15 calibrated the model parameters by emerging pedestrian movement patterns such as lane formation. However, with these methods, it is unclear whether the modified SFM is able to represent agent behavior accurately because the simulated result only reproduces a reasonable phenomenon. Model parameter calibration is a key and necessary step to guaranteeing the accuracy of the developed model. The maximum log-likelihood estimation method was used by Zeng et al. 24 to calibrate the parameters of modified SFMs. The calibration method used in this article is based on the method adopted by Zeng et al. Some of the parameters can be obtained from the observed data directly, but others cannot.
Real trajectories are extracted from video data and scenarios where electric bikes and vehicles interact with close-by individuals (electric bikes or vehicles) are selected to calibrate the parameters. Behaviors of electric bikes and vehicles were observed in a road segment in Zhengzhou, China (Huan Yuan Road segment between Nong Ye Road and Feng Chan Road, 24 February 2016). The behaviors of electric bikes and vehicles were video recorded with a digital camera for 3 h (electric bike volume is 856 pcu/h, and the electric bike average speed is 5.27 m/s; cars volume is 656 pcu/h, and the car average speed is 12.6 m/s). The trajectory extractor software developed by Jiang Sheng was used to extract velocities and acceleration of road users directly from video, and the crossing coordinate positions of electric bikes and cars were manually obtained from the video every 0.5 s. Distances and velocity angles between pedestrians can be derived by calculation. The detailed analysis of error and accuracy of the software was done, and the video analysis procedure is explained by S Jiang and colleagues.27,28
In the study by Zeng et al., 24 a three-stage process is adopted to overcome this problem:
The parameters such as visual range, which are measurable but difficult to be identified from the trajectory dataset, are estimated by referring to the research results of Anvari et al., 21 Zeng et al., 24 and Li et.al. 29
Those parameters that can be determined by the observed dataset are directly estimated, such as relaxation time and desired speed
After determining these above measurable parameters, other non-measurable parameters, such as the strength coefficients of each force that do not have concrete physical meanings, are derived by maximum log-likelihood estimation method. The next time step position (

Because the x- and y-direction components are assumed to obey normal distributions,



where
The

To simplify the process of computation, logarithms are taken of both sides of equation (51), turning equation (51) into equation (52). The

The calibration results of the parameter estimation are presented in Table 1. These parameters are applied in simulating the developed SFM. The p values at the 95% confidence level indicate that all the parameters of the model are effective.
Calibration results of parameters.

Example analysis
A simulation analysis of electric bike–car mixed flow on Huan Yuan Road segment between Nong Ye Road and Feng Chan Road is made. The length of the road segment is 303 m. In order to acquire the stability simulation result, the length of the simulation road segment is set to be 400 m, and the width of the electric bike lane and vehicle lane is 3 and 4 m, respectively. There are 276 electric bikes and 493 vehicles crossing the road segment. The simulation is repeated 100 times to eliminate the influence of random disturbance. The anisotropic character of electric bikes and vehicles is set to 0.3 so that interactions outside of the field of view have little effect on the forces.
The modified SFM is implemented in MATLAB. After 100 simulations were done, all the average speeds of individuals (electric bikes and cars) in the simulations scenarios are recorded. That means that the speeds of 27,600 electric bikes and 49,300 vehicles are taken to determine the speed distribution. Then, the simulation speed distribution and the observed speed distribution are compared. Figure 8 shows the analysis of the speed distributions of electric bikes and vehicles. It is clear that the simulation speed distribution and the observed speed distribution match closely by comparing their mean and

Speed histograms of electric bikes and vehicles observed data and simulation results.
We recorded and analyzed the changing-lane times of electric bikes in different mixed traffic flow conditions. The statistical results are shown in Figure 9. As seen in Figure 9(a), when the vehicles number is constant, the changing-lane times of electric bikes will become larger with the electric bikes number increasing because the electric bikes tend to move into the vehicle lane to alleviate the increasing interference between electric bikes. Therefore, the probability of electric bikes riding into vehicle lane will become higher. Figure 9(b) shows the evanesce time from the first vehicle stepping into the simulations road segment to the last vehicle stepping out the simulations road segment. It is clear that when the vehicles number is constant, the evanesce time of vehicles will become larger with the electric bikes number increasing. But when the electric bikes number is small, the evanesce time of vehicles almost does not change. This is because changing lane happens infrequently when the electric bikes number is small and the interference between electric bikes is weak. Only when the electric bikes increase to a certain amount, the electric bikes will interfere the vehicles. With the number of electric bicycles moving into motor vehicle lane increasing, the evanesce time of vehicles will increase.
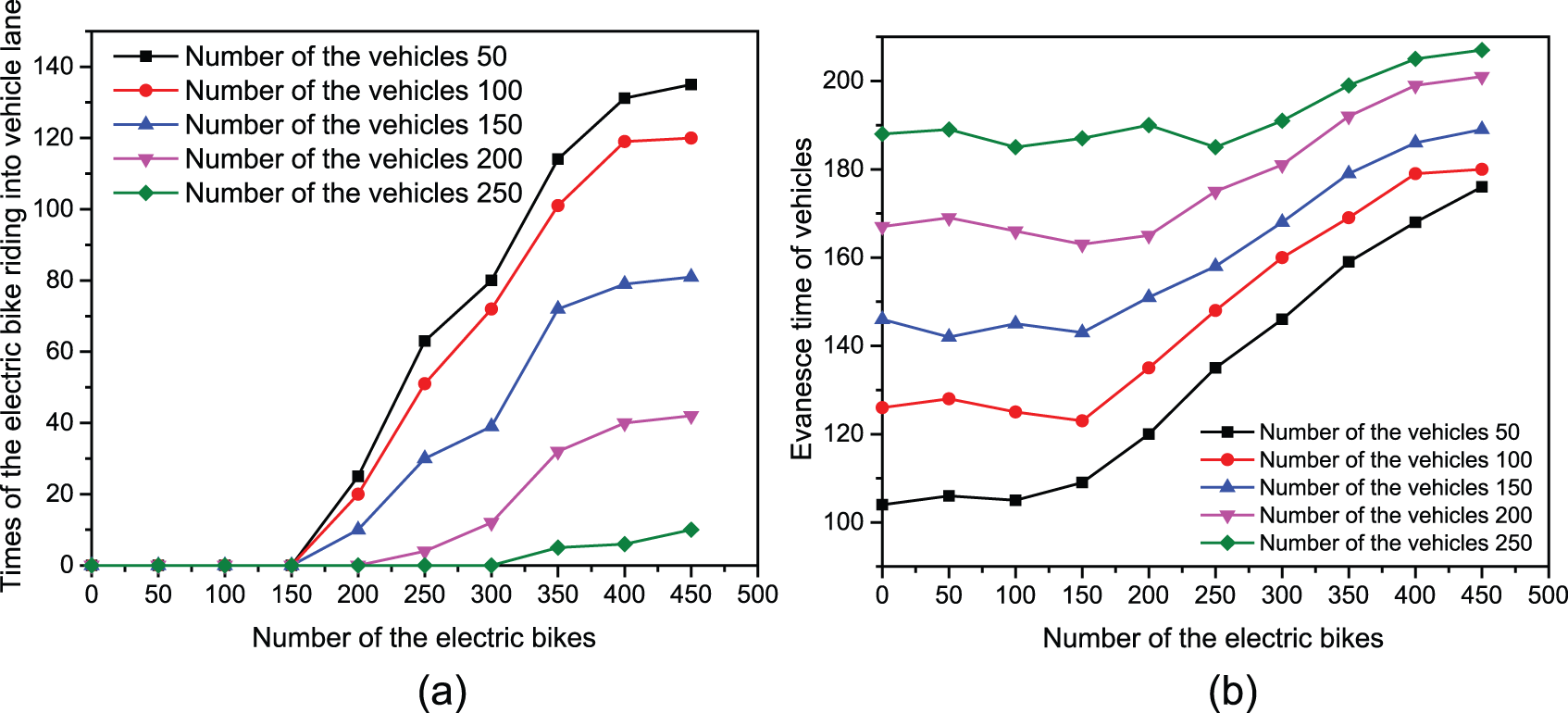
Schematic figure of the simulation results analysis: (a) the relationship between the number and changing lane times of electric bikes and (b) the relationship between the number and evanesce times of electric bikes.
As seen in Figure 9(a), when the electric bikes number is constant, with the vehicles increasing, the changing-lane times of electric bikes will decrease. Because when the vehicles increase, the number of vehicles in the unit distance will rise, which reduces the probability of electric bikes changing lane. In other words, the interference between cars and electric bikes will become severe. Changing-lane times of the electric bikes decrease with the interference becoming more severe. Electric bikers prefer to move in the electric bike lane for safety.
We see the potential application of the developed model from Figure 9. For example, we can draw conclusion that setting separate line is effective only when the electric bikes exceed 150. Because the electric bikes almost do not change lane and have little influence on the evanesce time of vehicles when electric bikes are less than 150. The developed model can be used for assessing the effective of new traffic layout. But it needs further study.
Discussion and conclusion
Based on the basic SFM and the interactions between electric bikes and vehicles, a new modified SFM considering the characteristics of mixed traffic flow is established to simulate mixed traffic flow in a road segment with separated line. The conflict avoidance mechanism between electric bikes and cars, following characteristics of electric bikes and vehicles and changing-lane characteristics are modeled with the extended SFMs. Then, the various parameters in the proposed SFM were calibrated using maximum likelihood estimation method. Finally, the effectiveness of proposed models was verified by comparing the observed and simulated speed distribution of the electric bikes and cars. The major contributions and innovations of the article are summarized as follows:
Most of the studies so far focused on modified SFM for pedestrians and bikes. And the mechanisms of interaction between electric bikes and vehicles were seldom taken into consideration, let alone modeled with SFM. The article developed extended SFMs for electric bikes traffic flow, vehicles traffic flow, and mixed traffic flow.
The conflict avoiding model of electric bikes and cars was developed to describe the interactions between electric bikes and cars.
Following is a ubiquitous traffic phenomenon in electric bike and vehicle traffic flow. To explain the following characteristics of electric bikes and vehicles, a following force based on SFM was proposed. Following force models allow the rear electric bikes or cars to follow the front electric bikes or vehicles.
A modified SFM from boundaries for electric bikes was developed. Different from the curb, the electric bikes can move into the vehicle lane, so the boundary of the vehicle lane line has different influence on the electric bikes.
Because the electric bikes can move into the vehicle lane, so a changing-lane force was added to the modified SFM.
The various parameters in the extended SFM were re-calibrated.
The proposed model can be used in a simulation platform capable of describing electric bike and car behaviors, conflict detection, and resolution. Besides, this simulation tool can be used by urban designers to exposure assessments for new alternative optimal design layout before implementation. For example, this simulation tool can be used to determine electric bike lane width under the condition of different electric bike and car traffic demand, besides, the threshold of setting separated electric lane can be obtained through many simulation experiments. However, because this article developed this model on the condition that the mixed traffic flow has one electric bike lane and one vehicle lane, so it is limited in some ways. The proposed model cannot be used in more complex traffic environments, such as two or more vehicle lanes. The mixed traffic flow has one electric bike lane and several vehicle lanes which needs further study in future.
Footnotes
Academic Editor: Hai Xiang Lin
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This research was funded by the National Natural Science Foundation of China (NOS. 51278520 and 51278220).