
Abstract
In a pilot valve system, the pressure in the control chamber of the main valve is straightforwardly affected by pressure oscillation in the downstream pipeline or the pilot tube. To solve this problem, an orifice is generally installed in the pilot tube to restrain the oscillation. However, the orifice is a nonlinear flow resistance; the amplitude of the oscillation alters the gain curve of the control pressure response. In this study, a linear flow resistance such as a porous material is employed to stabilize the pilot valve system. A test pilot valve was manufactured, and a pilot valve system was developed in the laboratory of the authors of this article. A mathematical model of the pilot valve system using linear and nonlinear flow resistances was simulated in MATLAB. The linearity of the P–Q characteristics of the linear flow resistance was confirmed, and a series of frequency response experiments were performed to examine the dynamic characteristics of the pilot valve system with various flow resistances. The experimental results were in accord with the simulation results. This implied that when porous materials were used in the pilot valve system, the gain of the pressure response did not vary regardless of the varying pressure vibration amplitude. Therefore, porous materials are suitable to be used in the pilot valve system instead of an orifice to enhance its stability.
Keywords
Introduction
In a medium-pressure gas pipeline, a pilot valve system is usually used in a gas governor unit to control the downstream pressure as it can reduce the offset of the secondary pressure. 1 The flow rate of the gas pipeline is regulated by the main valve. The pressure in the diaphragm chamber of the main valve is adjusted by the flow rate through the pilot tube (see Figure 1), and the flow rate is controlled by the pressure in the diaphragm chamber of the pilot valve. Numerous researchers focus on the analysis of flow field in various pilot valves by computational fluid dynamics (CFD) methods. Lv et al. 2 presented the flow field characteristics in a flapper-nozzle pilot valve when the flapper is moving, which reflects the actual operational conditions. Yuan and Guo 3 developed complete models of the pilot relief valve using deformation theory of thin plates. Qian et al.4,5 analyzed the dynamic flow characteristics and cavitation characteristics in a pilot-control globe valve. Their research studies can support design initiatives for further optimization and engineering applications of the pilot valve system. However, these studies are limited to the theoretical investigation of the pilot valve; the actual problems of the pilot valve system in gas pipelines are not adequately described in the literature.

Pilot-type governor unit.
Recently, a gas company observed the occurrence of resonant vibrations of the gas column 6 in the pilot tube. In addition, oscillations of secondary pressure are generally observed in the downstream pipeline. A number of factors cause these problems, such as dead bands 7 and choking flow, at the restrictions 8 and the self-excited vibration of the moving component in the valve. 9 The control pressure in the main valve is straightforwardly affected by all these vibrations, and these vibrations cause pressure response oscillations, resulting in secondary pressure instability. Pressure feedback can amplify the vibrations and can render the gas equipment unusable. 10
Generally, for preventing pressure oscillation caused by self-induced vibration of the pilot valve, the resistance of the pilot valve can be increased by increasing the friction in the valve stem and mass of the diaphragm and reducing the area of the diaphragm. For reducing the unstable pressure in the diaphragm chamber caused by the pressure oscillation in the pilot tube and downstream pipeline, a reference method that can be adopted is to enlarge the volume of the diaphragm chamber of the pilot valve and main valve. However, all these methods require modifications in the structure of the valve. Meanwhile, restricting the pressure feedback line is an effective method 11 to restrain the effect of downstream pressure vibration. Gas governor manufacturers install a flow resistance, such as an orifice, in the pilot tube; such designs can be observed in numerous past pilot valve patents.12–14 In certain pilot valve systems, the orifice is also a key component to control the action of the valve; a few literatures demonstrate the effect of an orifice in the pilot-control globe valve 15 and pilot-operated pressure relief valve 16 using numerical methods. However, the flow resistance of an orifice is nonlinear; the gain and phase curves of the pressure response in a bode diagram varies with the amplitude of the pressure oscillation.17–19 This implies that when the amplitude of the vibration varies, the amplitude magnitudes of the pressure response in the diaphragm chamber reduce by varying proportions at similar vibration frequency. Hence, it is a challenge for engineers to judge the stability of the system. As is known, the flow rate is proportional to the pressure difference when the flow state is transformed to a laminar flow in certain microstructures with low Reynolds numbers. This implies that certain microstructures exhibit linear flow characteristics; they are defined as linear flow resistances. A few researchers observed that porous materials exhibit linear flow rate characteristics when viscous effects govern the flow, which is referred to the Darcy regime.20–25 The pressure exceeds Darcy regime to a substantial degree; it is not feasible to attain this high with the pressure oscillation in the gas pipeline. Therefore, high-pressure conditions were not considered in this research study.
In our previous research study, 26 the dynamic characteristics of a pneumatic resistance-capacitance (RC) circuit with porous materials were investigated. In this study, a porous material is employed to stabilize the pilot valve system considering its linear flow resistance characteristics. The linear characteristics of these porous materials can be attributed to the fact that the flow state in their micro holes shifts to laminar. The P–Q characteristics curves of the porous materials were measured by performing a static flow rate experiment. Generally, the volume flow rate in a gas governor unit is higher than 2000 m3/h; however, it is challenging to perform an experiment with such a large flow rate in the laboratory of the authors of this article. Therefore, a test pilot valve was manufactured, and a pilot valve system was developed to evaluate the influence of the downstream pressure oscillation on the control pressure response. A mathematical model of this pilot valve system using linear flow resistance and nonlinear flow resistance was simulated in MATLAB. Then, a series of frequency response experiments were carried out to investigate the dynamic characteristics of the pilot valve testing system with various flow resistances. The experimental results were compared with the simulation results. The effect of the linear flow resistance on the dynamic characteristics of the pilot valve system was examined in this research study. The conclusions imply that porous materials are suitable for use, instead of an orifice, in a pilot valve system to enhance its stability.
Pilot valve testing system
Pilot valve system is a representative category of gas governor units. Figure 1 illustrates a common pilot valve system. A main valve (called the axial flow valve) is installed in the main gas pipeline, and a pilot valve is installed in the pilot line. When the downstream pressure P2 decreases, the change is detected by the pilot tube, which is restricted by restriction 2. Then, the pressure Pd acting on the diaphragm of the pilot valve also drops, and the valve opens. The gas flows into the pilot line from the diaphragm chamber of the main valve, and the main valve opens because of the drop in the control pressure Pc. The flow rate Q2 and downstream pressure P2 increase and feedback to the pilot valve. Eventually, the system returns to a new equilibrium state. It can be observed that the downstream pressure oscillation affects the pressure Pd in the pilot valve instantaneously and affects the control pressure Pc in the main valve indirectly.
The flow rate is substantially large in the main pipe, and it is not feasible to generate such a flow rate in our laboratory. Therefore, in the pilot valve testing system (Figure 2), the diaphragm chamber of the main valve was replaced with an isothermal chamber (ITC), 27 and the main pipe was removed. The pressure in the ITC continued to be referred to as control pressure Pc. A sine-wave pressure Pi, instead of the downstream oscillation, was provided by a pressure generator. The upstream pressure P1 was maintained constant by the pressure regulator. To evaluate the characteristics of the pilot valve testing system, the pressure responses of Pc and Pd relative to Pi were measured under various test restrictions. In this test system, it is convenient to observe the pressure response results under similar experimental conditions. The pressure Pi can be maintained as a sine wave because there is no feedback flow to affect it.

Pilot valve testing system.
Linear and nonlinear flow resistances
Pressure–flow (P–Q) characteristics curve is a critical characterization of flow resistance. A static flow rate experiment was performed to ascertain the P–Q characteristics of the restrictions. Figure 3 illustrates the pneumatic devices of the static experiment. In this experiment, air was used instead of any specific gas because of the safety that it affords and thermodynamic similarity. The flow rate Q was adjusted by the control valve and recorded by the quick flow sensor (QFS). The differential pressure was obtained from pressure sensors P1 and P2.

Static experimental setup.
A porous material was used as a test restriction in this experiment. The dimensions and shape of the material are illustrated in Figure 4. The porous material is a sintered metal element with a filter precision of 2 μm. The arrows at the right panel in Figure 4 illustrate the flow route through the material and its package case, and it indicates that the effective area of the porous material is the inner wall of the hollow cylinder. Porous materials are linear flow resistances, that is, its flow rate is proportional to the pressure. Therefore, the flow equation is a linear equation, and the linear fitting equation can be obtained through the experimental data on P–Q characteristics.

Porous material specimen.
The other test restriction used is an orifice, which has an inner diameter of 2.8 mm. The nonlinear flow rate equation 28 (equation (1)) of the orifice is



where R is the ideal gas constant, PU is the upstream pressure, PD is the downstream pressure, θ1 is the flow temperature, κ is the specific heat ratio, Se is the effective area, d is the diameter of the orifice, and CD is the discharge coefficient.
Figure 5 illustrates the P–Q characteristic curves for the various flow resistances. The diamond- and triangle-shaped points represent the experimental data of the porous material and orifice, respectively. The results demonstrate that the experimental data points of the porous material are distributed along a straight line, whereas the data points of the orifice are distributed along a curve. From the experimental data, the discharge coefficient CD for this orifice was calculated to be 0.93, with the upstream pressure set to 90 kPa. For an upstream pressure of 150 kPa, the P–Q characteristic curve for the orifice is represented by the dashed curve in Figure 5. The fitted equation of the P–Q characteristics (straight line) for the porous material was determined to be

Here, Qp is the quantity of flow, and ΔP is the differential pressure. The pressure and flow rate are measured in units of kPa and L/min, respectively.

P–Q characteristic curves.
Simulation
The test pilot valve was manufactured by Tokyo Gas Co., Ltd (Figure 6). An orifice (restriction 1) located upstream is embedded in the inlet of the valve. The diaphragm chamber is isolated from the downstream volume to avoid the effect of the downstream pressure. The control chamber is connected to an ITC to enlarge the volume and eliminate the change in temperature. The mathematical model of this system constitutes three components: the pneumatic RC circuit with the restriction and diaphragm chamber, pilot valve model, and control chamber isothermal model.

Model of pilot valve testing system.
Mathematical model of pneumatic RC circuit
The pressure vibration was simulated by a sine-wave pressure source. The mass flow rate Gd through the orifice and porous materials were obtained from equations (1) and (3). The volume in the diaphragm chamber 17 was assumed to be constant, and the ideal gas equation applied was the following

Differentiating equation (4) with respect to time yields the following

where Pd is the pressure in the diaphragm chamber, Vd is the volume, m is the mass of the air in the chamber, and θ is the average temperature. Note that dm/dt is the mass flow rate Gd.
Considering the enthalpy in the diaphragm chamber and the energy variation along the wall, the energy equation was obtained from the first law of thermodynamics

where ρ is the average density of air in the diaphragm chamber, Cv is the constant volume specific heat capacity, Cv = 718 J/(kg K), and q is the heat transfer along the wall. Using Newton’s law of cooling, q is defined as

where θa is the temperature of the atmosphere, h is the thermal conductivity, and Sh is the heat transfer area of the diaphragm chamber. Equation (7) is substituted in equation (6) to obtain

By substituting equation (8) in equation (5) and using the equation R = Cp−Cv, where Cp is the constant pressure specific heat capacity (Cp = 1005 J/(kg K)), the following equation is obtained

Mathematical model of test pilot valve
The mass flow rate GN through the nozzle flapper of the valve can also be obtained using equation (1), that is, GN = G (Sex, Pc, Po). Here, Sex is the effective area of the nozzle flapper and is defined as

where x is the displacement between the nozzle and flapper, and dN is the diameter of the nozzle. x depends on the dynamic equation of the valve, and thus

where mv is the total mass of the moving component and includes the mass of the flapper and center plates and one third of the sum of the spring mass, c is the damping in the valve, k1 is the spring constant of the adjustment spring, k2 is the spring constant of the counter spring, Pset is the set pressure of the valve, and Ad is the effective area of the diaphragm. The Coulomb friction was neglected in this equation because it was negligible in the test valve.
Mathematical model of ITC
In the ITC, the temperature is constant. Therefore, by removing the temperature term, equation (5) can be written as

where Vc is the sum of the volumes of the ITC, control chamber, and pipe; Pc is the control pressure; G1 is the flow rate through orifice 2 in the valve; G1 = G (Se2, P1, Pc); and Se2 is the effective area of orifice 2.
Finally, to simplify the calculation, the ITC continues to be used for the downstream volume as it is not a critical part of this simulation. Thus

where Vo is the downstream volume, Po is the downstream pressure, G2 is the mass flow rate through the outlet of the valve, G2 = G (Se3, Po, Pa), and Se3 is the effective area of the outlet.
The gains of Pc and Pd are defined as

where Ac, Ad, and Ai are the amplitudes of Pc, Pd, and Pi, respectively. The phase difference Δϕc with respect to the input pressure is also considered, that is

Here, ϕc and ϕi are the phases of Pc and Pi, respectively.
The simulation was implemented in Simulink, which is integrated with MATLAB. The Runge–Kutta algorithm was adopted to calculate the simulation models. The solver selects the fixed-step solver; the step size of the sample time was set to 0.0001 s; Figure 7 illustrates the simulation block diagram.

Block diagram of simulation.
Experimental dynamic characteristics
A frequency response experiment was performed to investigate the dynamic response of the pilot valve testing system using the porous materials and orifice.
Experimental apparatus
Figure 8 illustrates the pneumatic circuit used in the frequency response experiment. A pressure generator was designed to provide a sine-wave pressure input. In this pressure generator, the inflow and outflow from a control chamber is regulated by a servo valve using proportional–integral (PI) feedback control. The generated input pressure Pi and the response pressures in the diaphragm chamber (Pd) and ITC (Pc) were recorded by pressure sensors. Figure 9 presents an image of the experimental apparatus. Table 1 lists the specifications of the devices used in the experiment.

Pneumatic circuit diagram of dynamic experiment.

Photograph of experimental apparatus.
Specifications of the experimental devices.

ITC: isothermal chamber.
The experimental conditions are listed in Table 2. All the pressure values are recorded relative to the pressures in the succeeding component of the apparatus. The data of Pi, Pc, and Pd were recorded while increasing the frequency at similar input amplitude. The test valve started to open at the set pressure of 161 kPa, and the base value of Pi was set to 150 kPa. Therefore, the amplitude was limited to 10 kPa because the valve reached full-open and full-close states when the amplitude exceeded 10 kPa.
Experimental conditions.

Simulation and experimental results
The pressure generator can produce a reasonable sine-wave pressure Pi at low frequencies albeit not at high frequencies, as illustrated in Figure 10 (frequency: 20 Hz). Therefore, the data were processed by carrying out harmonic analysis based on the fast Fourier transform (FFT) technique to confirm the amplitude and phase accuracy. Figure 11 illustrates the shape of the experimental sine-wave pressures Pd and Pc at various frequencies for the porous material. The amplitudes of Pd and Pc decrease as the frequency increases because of the damping of the pneumatic RC circuit and test pilot valve.

Pressure wave for porous material (f = 20 Hz, Ai = 10 kPa).
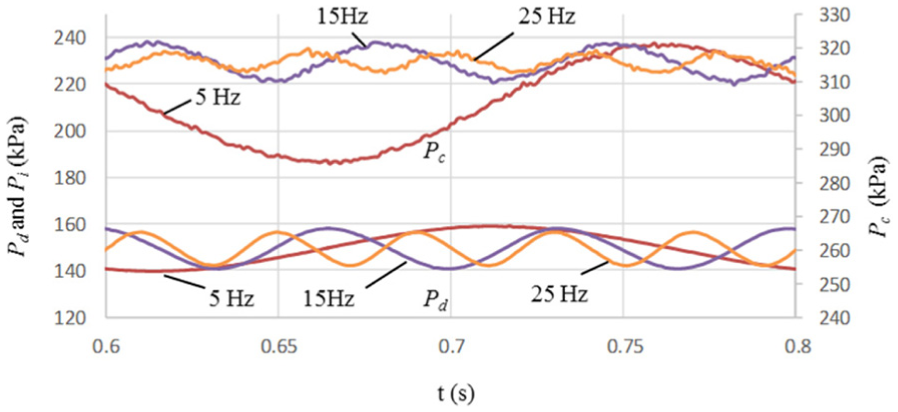
Pressure wave for porous material at various frequencies (Ai = 10 kPa).
Based on the definitions in equations (14) and (15), the variations in the Bode diagram of Pc with the frequency are illustrated in Figure 12. The points represent the measurement data, whereas the various markers denote the various amplitude conditions of the sine-wave input pressure. The colors denote the various restrictions. The red-dashed curve represents the simulation results of the porous material when the amplitudes of the input pressure Pi are 2, 5, and 10 kPa. The simulation results demonstrate that the gain drop curve of Pc as the frequency increases is constant with varying amplitude of the input pressure vibration, when the porous material is used as the test restriction. The experimental data for various amplitudes of the input pressure were in agreement considering that the data points were all located in the proximity of the same simulation curve. However, for the orifice, the gain curves are of three forms at high frequencies for various input amplitudes. The simulation results represented by the three blue solid curves and the distribution of the data points are also in high agreement with these curves. Thus, if the amplitude conditions of the input pressure varies, the pressure gain Pc drops at a different rate when the orifice is used as the test restriction. In addition, the width of the gain variation is approximately 5 dB at 25 Hz at input amplitudes between 2 and 10 kPa. The diagram of phase difference also follows the rules of this variation (Figure 12(b)).
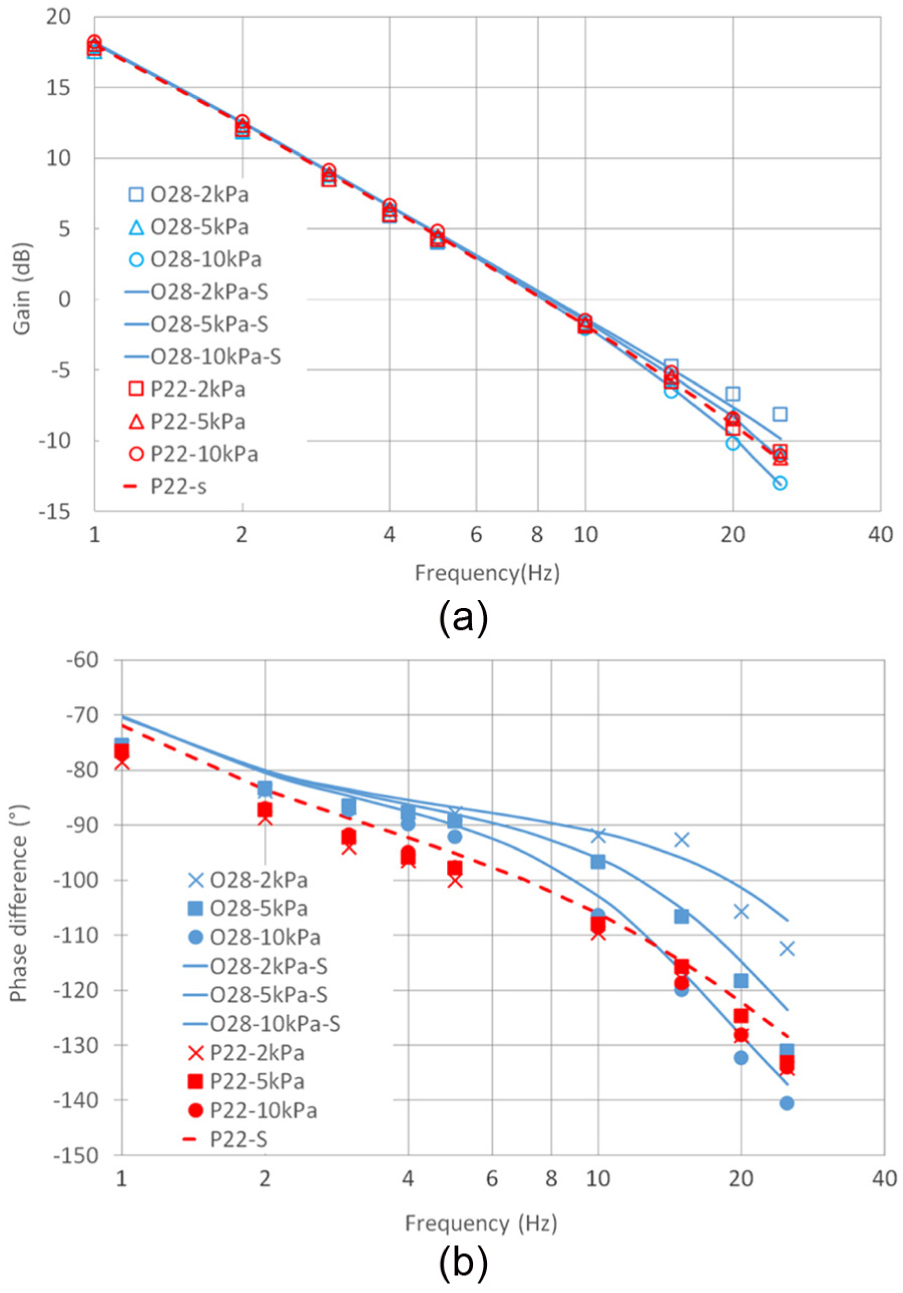
Frequency response of control pressure Pc: (a) gain and (b) phase difference between Pc and Pi.
At low frequencies, the gain and phase difference variations are approximately similar irrespective of the restriction used because by this time, the primary influencing factor is the pilot valve damping. However, these curves vary at high frequencies. This is conjectured because the damping in the pneumatic resistance capacitance circuit is affected by the linear and nonlinear flow resistances at this time. When using the porous material, the quantity of flow into the diaphragm chamber increases in proportion to the differential pressure, as illustrated in Figure 5. If the amplitude of the input pressure Pi varies, the flow rate and the amplitude of the pressure response Pd vary proportionally. However, when using an orifice, these variations do not remain proportional because of the nonlinear behavior. In short, the flow resistance is constant in a porous material; however, it is not so in an orifice. The gain of the diaphragm chamber pressure Pd is illustrated in Figure 13. In theory, the experimental data are to be distributed along a single simulation curve for various input amplitudes when the porous material is used as the restriction. However, the red data points are marginally spread out in the figure. This is conjectured because of the marginal volume variation in the chamber due to the motion of the diaphragm; however, this volume is considered to be constant in the theoretical calculations. Although the data points are spread out, the width of the gain variation at input amplitudes between 2 and 10 kPa is smaller than the width of the gain variation in the orifice. Meanwhile, when the amplitude of the pressure oscillation is marginal (e.g. 2 kPa), the gain curve of the porous material is lower than that of the orifice. This implies that the response pressure is attenuated more in the orifice and using a porous material can filter the marginal pressure oscillation at high frequency. However, it is also observed in Figure 12(b) that the phase difference of the porous material is larger than that of the orifice with marginal pressure oscillation. It is likely to cause a hysteresis problem in the control system.

Frequency response of diaphragm chamber pressure Pd.
To summarize, as the porous material is a linear flow resistance, the gain and pressure difference variations of the pressure response in the diaphragm chamber do not vary notwithstanding the varying pressure vibration amplitude. Consequently, the variation in the vibration amplitude also does not affect the gain of the control pressure Pc. However, the orifice does not exhibit this property. This indicates that the pressure control system can be conveniently linearized using the porous material. Engineers are enabled to regulate the valve system and estimate its performance more effectively using this material. These conclusions indicate that porous materials can be used, instead of an orifice, in the pilot valve system to further stabilize the system.
Conclusion
In this study, linear flow resistance such as porous materials was proposed to enhance the characteristics of a pilot valve system used in a gas governor unit. A static flow rate experiment was carried out to verify the P–Q characteristics of a porous material and an orifice. A test pilot valve was manufactured, and a frequency response experiment was performed to evaluate its dynamic response characteristics. A mathematic model of the pilot valve testing system was developed in MATLAB. The experimental results are in accord with the simulation results. Finally, we came to the following conclusions:
Porous materials are linear flow resistances as its P–Q characteristics curves exhibit effective linearity.
In the frequency response experiment with a porous material restriction, the gain and phase difference curves of the diaphragm chamber pressure Pd remain constant with variations in the amplitude of the input vibration because the porous material is a linear flow resistance. As a result, the control pressure remains unaffected by the variations in the amplitude of the input vibration. However, the control pressure varies in the case of the orifice because of its nonlinear flow characteristics.
When the amplitude of the pressure oscillation is marginal, the gain curve of the porous material is lower than that of the orifice. This implies that the response pressure is attenuated more than in the orifice and using the porous material can filter the marginal pressure oscillation at high frequency. However, the phase difference of the porous material is larger than that of the orifice under this condition. It is likely to cause a hysteresis problem in the control system.
The simulation results illustrate that the mathematical model of the pilot valve system is useful for analyzing the dynamic frequency response of pilot valve systems with various restrictions.
The conclusions indicate that the pressure control system can be conveniently linearized using the porous material. Engineers are enabled to control the valve system and estimate its performance more effectively using this material. Moreover, porous materials can be used, instead of an orifice, in the pilot valve system to further stabilize the system.
Footnotes
Academic Editor: Daxu Zhang
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) received no financial support for the research, authorship, and/or publication of this article.