
Abstract
In this article, we propose a new approach to solve the hybrid fuzzy differential equations based on the feed-forward neural networks. We first replace it by a system of ordinary differential equations. A trial solution of this system involves two parts. The first part satisfies the initial condition and contains no adjustable parameters; however, the second part involves a feed-forward neural network containing adjustable parameters (the weights). This method shows that using neural networks provides solutions with good generalization and the high accuracy.
Keywords
Introduction
Fuzzy differential equations (FDEs) are significant for studying and solving large proportions of problems in many topics of applied mathematics, particularly in relation to physics, geography, medicine, biology, control chaotic systems, bioinformatics and computational biology, synchronize hyperchaotic systems, economics and finance, and so on.1–3 In lots of applications, some of the parameters are represented by fuzzy numbers rather than the crisp numbers, and hence, it is essential to develop mathematical models and numerical procedures which would have appropriately treated to general FDEs. The knowledge about differential equations is often incomplete or vague. The FDEs were formulated by Kaleva 4 and Seikkala 5 initially. Hybrid systems received too much attention in the recent literatures as well. Hybrid systems evolve in continuous time, like differential systems, but undergoing a fundamental change in their governing equations at a sequence of discrete times. When a continuous time dynamics of a hybrid system is given by a FDE, the system is called a hybrid fuzzy differential system. For analytical results on hybrid fuzzy differential equations (HFDEs), see Lakshmikantham and Liu 6 and Lakshmikantham and Mohapatra. 7 Hybrid systems are devoted for modeling, designing, and validating interactive systems of computer programs and continuous systems as well. These control systems which are capable of controlling complex systems have discrete event dynamics as well as continuous time dynamics that can be modeled by hybrid systems. The differential systems containing fuzzy-valued functions and interaction with a discrete time controller are named as hybrid fuzzy differential systems (HFDEs). Several numerical techniques have been applied for solving HFDEs. For instance, Pederson and Sambandham8,9 investigated the numerical solution of these equations using the Euler and Runge–Kutta methods. Prakash and Kalaiselvi 10 studied the predictor-corrector method for HFDEs. In addition, Fard and Bidgoli 11 solved HFDEs by the Nystrom method. Similarly, Kim and Sakthivel 12 studied the predictor–corrector method for HFDEs, and Allahviranloo and Salahshour 13 investigated the numerical solution of HFDEs, using the Euler method under characterization theorem and Bede’s differentiability. Ahmadian et al.14–16 applied Runge–Kutta method with lower function evaluations and the reduced the number of function evaluations for solving HFDEs. Paripour et al. 17 applied Adomian decomposition method for solving HFDEs.
In this study, we develop numerical methods for HFDEs by an application of artificial neural network. Lagaris et al. 18 designed artificial neural networks for solving ordinary differential equations (ODEs) and partial differential equations (PDEs). They used multilayer perceptron to estimate the solution of differential equations. In 2010, Effati and Pakdaman 19 used artificial neural networks for solving FDEs. Similarly, Pakdaman et al. 20 solved differential equations of fractional order using an optimization technique based on training artificial neural network. Their neural network model was trained over an interval (over which the differential equation must be solved), so the inputs of the neural network model were the training points. Bede 21 proved a characterization theorem which states that under certain conditions, an FDE under the Hukuhara differentiability is equivalent to a system of ODEs. Moreover, Bede also noticed that this characterization theorem can aid to solve FDEs numerically through converting the FDEs to a system of ODEs, which later could be solved by numerical methods. In this article, using the characterization theorem, we generalize a fourth-order Runge–Kutta method that originally presented to solve the HFDEs. That is, we substitute the original initial value problem with two parametric hybrid ordinary differential systems. Then, the extension of Bede’s characterization theorem for HFDEs, which was investigated by Pederson and Sambandham, 22 is employed to generalize the derivatives. Finally, these results are applied to solve the HFDEs numerically by the fourth-order reduced Runge–Kutta (RRK) method.
Preliminaries
Definition 1
A fuzzy number is a function

The set of all fuzzy numbers is denoted by
Definition 2
An ordered pair of functions
The following equations define the addition and the scalar multiplication of fuzzy numbers in
Definition 3
The Hausdorff distance between

The following properties hold:
Definition 4
Let

Definition 5
Suppose
Definition 6
Let

and

exist and are equal to
The above definition is a generalization of the H-differentiability of a set-valued function. From Bhaskar et al., 27 it follows that a H-differentiable function has increasing length of support, so this definition of a derivative is very restrictive. In this regard, Bede and Gal 28 introduced a more generalized definition of H-differentiability which is our interest in this article.
Definition 7
Let
For all

or
For all

or
For all

or
For all

Theorem 1 (Bede’s characterization theorem 21 )
Let us consider the fuzzy initial value problem (FIVP)

where
There exists on an

Then, the FIVP (equation (1)) and system of ODEs

are equivalent.
The hybrid fuzzy differential system
Consider the following hybrid fuzzy differential system

where
To be specific, the system would look like

Assuming that the existence and uniqueness of solutions of equation (3) hold for each

We note that the solutions of equation (3) are piecewise differentiable in each interval for

The parametric form of the above system is given by

where
Theorem 2
Consider the HFDE (3) expanded as equation (4) where for
There exists a

Then, the FIVP (equation (3)) and system of ODEs

are equivalent.
Neural networks
Using neural networks provides solutions with very good generalizability (such as differentiability). However, an important feature of multilayer perceptrons is their utility to approximate functions, which leads to a wide applicability in most problems. In this article, the function approximation capability of feed-forward neural networks is used by expressing the trial solutions for system (7) as the sum of two terms (see equation (9)). The first term satisfies the initial conditions and does not contain adjustable parameters. The second term involves a feed-forward neural network to be trained, so satisfies the differential equations. Since it is known as a multilayer perceptron with one hidden layer which can approximate any function to arbitrary accuracy, the multilayer perceptron is used as the type of the network architecture.
If

where

Each trial solution

where

Now suppose a multilayer perceptron has a hidden layer with

where

where


Architecture of the perceptron.
Numerical example
We use the Broyden–Fletcher–Goldfarb–Shanno (BFGS) quasi-Newton method to minimize the objective function in the MATLAB optimization toolbox. We take
Example
Assume the hybrid FIVP

where

and

for which
The hybrid fuzzy initial problem (equation (14)) is equivalent to the following system of FIVPs

In equation (14),

has a unique solution on
Exact solution for

The trial solutions in the neural form are as follows for

The exact solution for

The trial solutions for

The exact solution for

The trial solutions for

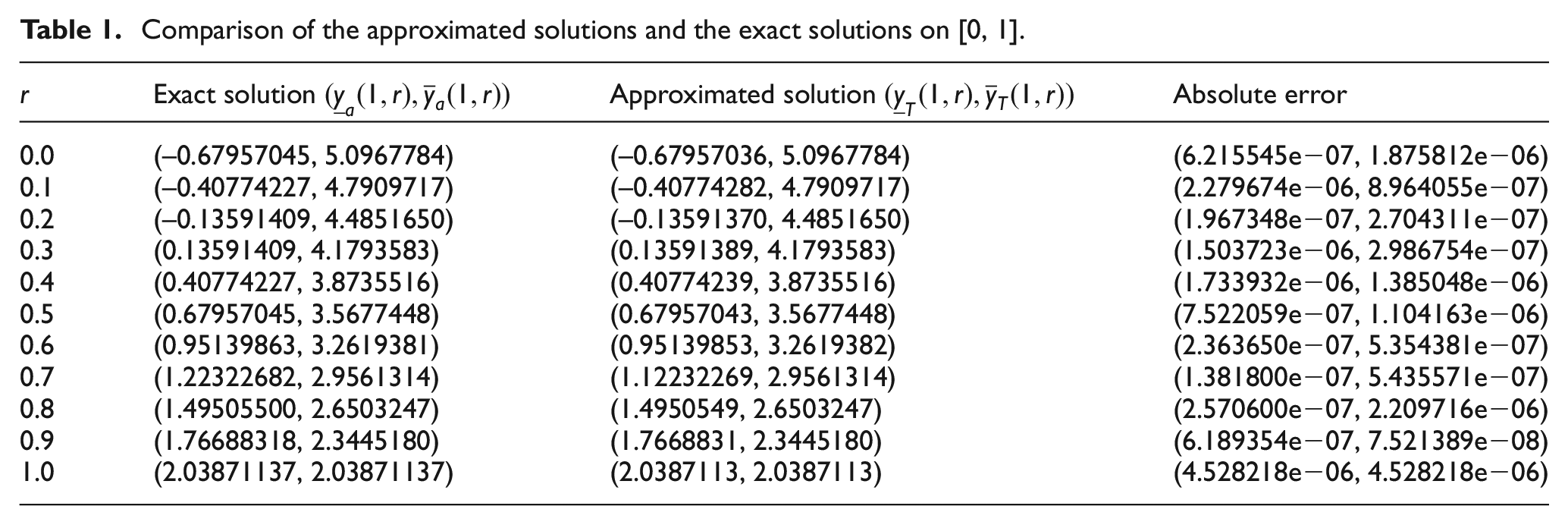
The numerical results of example are given in Tables 1–3. The exact and approximate solutions by artificial neural network are compared and plotted at
Comparison of the approximated solutions and the exact solutions on [0, 1].
Comparison of the approximated solutions and the exact solutions on [1, 1.5].

Comparison of the approximated solutions and the exact solutions on [1.5, 2].


Comparison exact solution and approximated solution ∘ in

Comparison exact solution and approximated solution ∘ in

Comparison exact solution and approximated solution ∘ in
Conclusion
In summary, we defined a new method for solving HFDEs. We demonstrated the ability of neural networks for approximating the solutions of FDEs. By comparing our achievements with the results obtained using numerical methods, it is clear that our proposed method gives more accurate approximations. Also better results (specially in nonlinear cases) might be possible if we use more neurons or training points. In addition, after solving a FDE, we obtained the solution at any arbitrary point in the training interval (even between training points). Applicability in function approximations of neutral networks is the main reason for using neural networks. More research is in progress for applying and extending this new approach for solving nth-order FDEs as well as a system of FDEs. The numerical results showed that the method has good accuracy and it is efficient.
Footnotes
Academic Editor: Dumitru Baleanu
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: The second author, Massimiliano Ferrara, received a financial support from the iritMED, Istituto di Ricerca per l Innovazione e la Tecnologia nel Mediterraneo, for publication of this article.