
Abstract
A disturbance attenuation–based sliding mode control approach with an extended disturbance observer is proposed for systems with mismatched uncertainties. A novel adaptive sliding surface consisting of the disturbance estimation is presented to eliminate the effect of mismatched disturbance in the sliding mode. The proposed method exhibits the following two attractive features. First, the asymptotical stability of adaptive sliding mode can be guaranteed even if the disturbance estimation error of the disturbance observer exists. Second, the nominal performance of the proposed approach is close to that of the traditional sliding mode control method in the absence of uncertainties. Finally, simulation results of the numerical and application examples show that the proposed nonlinear sliding mode control approach has the better dynamic performance as well as robustness and chattering reduction compared with other nonlinear sliding mode control methods.
Keywords
Introduction
It is well known that sliding mode control (SMC) is robust to matched uncertainties since it has the property of invariance on the sliding mode in the presence of matched uncertainties and disturbances. SMC method as an effective and popular control strategy has been widely used in diverse fields in order to obtain satisfactory performance.1,2 However, uncertainties existing in control systems may not necessarily satisfy the matching criteria, examples can be seen in a lot of practical systems such as permanent magnet synchronous motors,3,4 MAGnetic LEVitation (MAGLEV) suspension system, 5 flexible joint manipulator, 6 and control system for missiles.7,8 When the system is subjected to unmatched uncertainty, invariance and robustness with traditional SMC would fail due to the fact that SMC is not satisfied with matching condition.
In order to eliminate the effect, the mismatched uncertainties in practical applications, many authors are committed to researching activities to address the problem of mismatched uncertainty in SMC. In general, these methods can be divided into the following two categories.
The first category mainly uses different control strategies to reduce the impact of mismatched uncertainties on the stability of the system, such as linear matrix inequality (LMI)-based approach, 9 the Riccati approach, 10 fuzzy and neural network based control,11–13 adaptive approach,14–17 invariant ellipsoid method, 18 and integral SMC approach.19–22 The uncertainty of the mismatch uncertainties requires the bounds or vanity of the H2 norm in above methods. However, it is not a reasonable assumption of the actual system. For example, lumped uncertainties may have nonzero steady-state values, and there are no bounded H2 norms.23,24
The second category to address the problem of mismatched uncertain systems is usually use the method composed of the backstepping and SMC method.25,26 The key idea of these approaches is based on a virtual control method in frame of the backstepping approach and the state to reach the surface and slide to the desired equilibrium using the SMC method. SMC method plays an important role in these methods. It is an effective control method that the traditional sliding mode with the disturbance observer (DO) for mismatched nonlinear systems.27,28 The approach can reduce the effect of the mismatched uncertainties by employing the disturbance estimation of DO. However, the dynamic performance in the sliding mode is seriously subject to the estimation error of the mismatch uncertainties.
In this article, a new approach is proposed based on the second category method, and the main contributions are listed as follows:
The adaptive sliding surface with DO is proposed in order that the sliding motion of SMC is insensitive to the mismatched disturbance.
The effect of estimation error associated with mismatched uncertainties can be eliminated so as to guarantee the asymptotical stability of system.
The sliding surface can be designed when the initial states are unknown.
The control with adaptive term is modified to alleviate the chattering problem further. The proposed approach can be implemented when the bound on the estimation of uncertainty is not known exactly.
The remaining part of the article is organized as follows: the problem and objective are stated in section “Problem formulation.” The control approach consisting of a novel adaptive sliding surface with DO is described. The stability is analyzed in section “Disturbance attenuation–based SMC method.” The performance is illustrated by simulation examples in section “Numerical example.” Finally, conclusions are reported in section “Conclusion.”
Problem formulation
Consider the following system

where
Assumption 1
The disturbance in system (1) is bounded and defined by
Assumption 2
The disturbance in system (1) is continuous and satisfies

where
Remark 1
The class of disturbance in Assumption 2 is much larger than the disturbance in Assumption 1. It may be noted that the disturbance in Assumption 2 is not required to know the bound
The objective is to design control u so that the system output is not affected by the mismatched uncertainty
SMC with DO
The sliding mode surface for system (1) affected by the mismatched disturbance is designed as follows 5

where

where
Accordingly, the SMC law is designed as follows 5

Combining equations (1), (3), (4), and (5) leads to

According to equation (6), the states in system (1), which stay initially outside the sliding surface, will reach the sliding surface
When

Remark 2
The state in equation (7) cannot be driven to the desired equilibrium point asymptotically based on the sliding mode control with disturbance observer (DO-SMC) law (equation (5)) when the derivation of the disturbance
Extended DO-modified SMC
The modified sliding mode surface for system (1) affected by the mismatched disturbance is designed as follows 6

where
where
The extended disturbance observer–modified sliding mode control (EDO-MSMC) law is designed as follows 6
Similarly, combining equations (1), (8), and (10) leads to

where
When

Remark 3
EDO-MSMC can be obtained when the initial state of system is known. In addition, the state
Disturbance attenuation–based SMC method
Adaptive SMC with extended DO
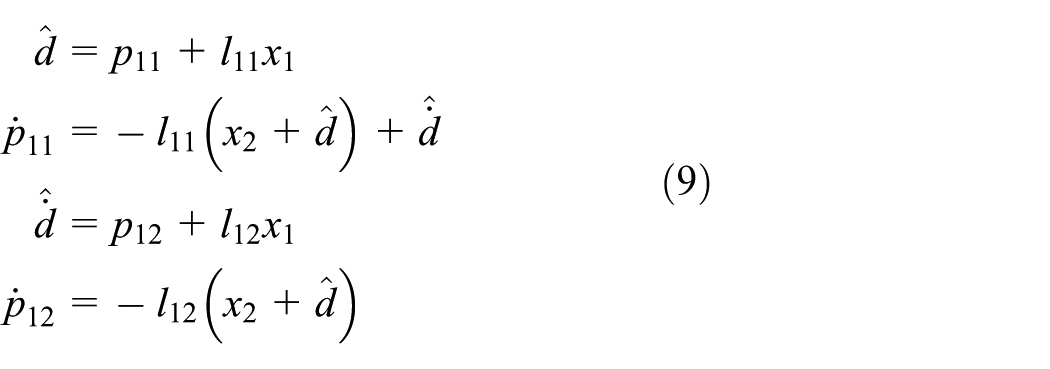
The novel adaptive sliding surface with extended DO (equation (9)) for system (1) is designed as follows

where
Stability of sliding mode dynamics
When the designed sliding surface

The other candidate Lyapunov function is as follows

Accordingly, the derivative of

Using adaptive parameter

When
Stability of SMC
Theorem 1
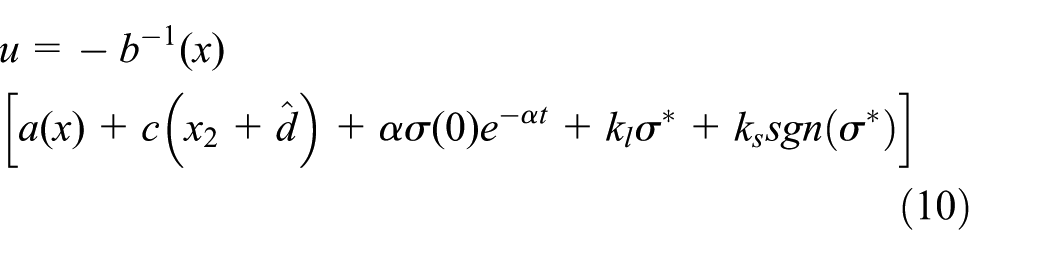
Suppose that Assumption 2 holds for system (1) and the sliding mode is chosen as equation (13), the closed-loop system is asymptotically stable when the control law is designed as

where
Proof
Taking the derivative of the sliding surface

Using the control law (18) into (19) leads to

The candidate Lyapunov function is as follows

Accordingly, the derivative of

Considering that

Considering that
Remark 4
The sliding mode in the adaptive sliding mode control with extended disturbance observer (EDO-ASMC) method is insensitive to unmatched uncertainties even if the disturbance estimation error of the DO exists.
Numerical example
Example 1
Considering the following illustrative example5,6
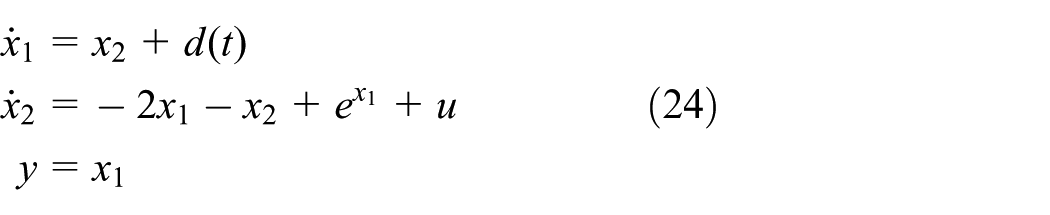
Constant disturbance
Here, the proposed control method is evaluated using case 2.
5
For this illustration, a constant disturbance
Control parameters for the numerical example case 1.
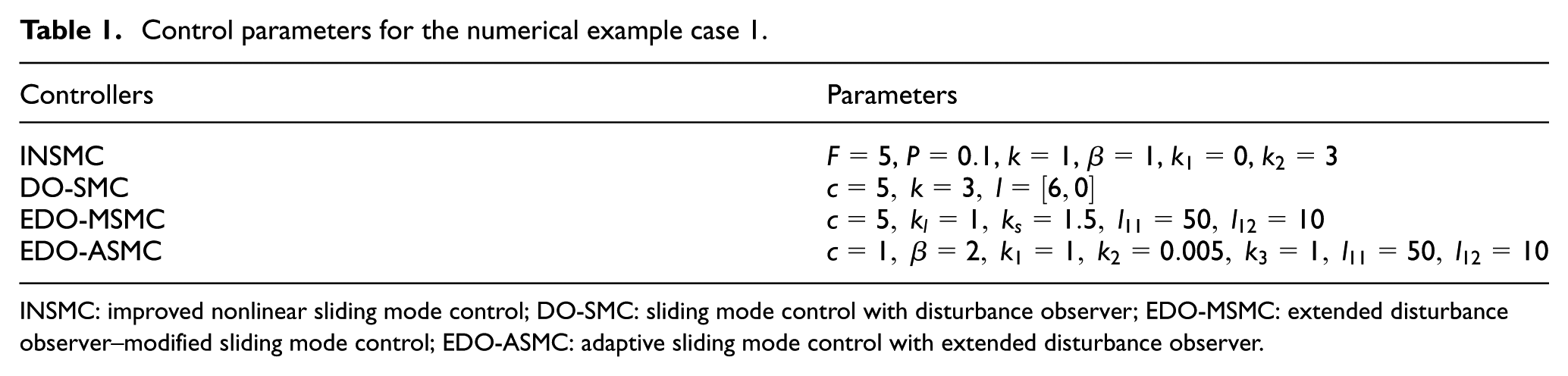
INSMC: improved nonlinear sliding mode control; DO-SMC: sliding mode control with disturbance observer; EDO-MSMC: extended disturbance observer–modified sliding mode control; EDO-ASMC: adaptive sliding mode control with extended disturbance observer.
It can be seen from Figure 1 that the performances are similar for the DO-SMC, EDO-MSMC, and the EDO-ASMC, but DO-SMC and EDO-MSMC have the substantial chattering due to the fact that the switch control is a discontinuous process, while the chattering problem in the proposed EDO-ASMC can be almost eliminated. However, the INSMC method failed to drive the state

Comparison among INSMC, DO-SMC, EDO-MSMC, and EDO-ASMC: (a) plot of x1, (b) plot of x2, and (c) plot of u.
Complex disturbance
In this case, the proposed method is evaluated using the complex mismatched disturbance. 6
The unmatched disturbance can be defined as follows

and a step change appears after 2 s. The initial state value is set as
Control parameters for the numerical example case 2.

DO-SMC: sliding mode control with disturbance observer; EDO-MSMC: extended disturbance observer–modified sliding mode control; EDO-ASMC: adaptive sliding mode control with extended disturbance observer.
It can be observed from Figure 2(a) that the state

Comparison among DO-SMC, EDO-MSMC, and EDO-ASMC in the presence of complex disturbances: (a) plot of x1, (b) plot of x2, and (c) plot of u.
Example 2: MAGLEV suspension system
MAGLEV suspension dynamic model
The dynamic model of a MAGLEV suspension system, which is subjected to the mismatched disturbance, is as follows 5

where the states are the current, vertical electromagnet velocity, and air gap, that is,




The physical meanings of the parameters in equations (27)–(30) are listed in Table 3. The major external disturbance in the MAGLEV suspension system comes from deterministic inputs to the suspension in the vertical direction. Such deterministic inputs are the transitions onto the track gradients. Deterministic input components considered here are referred Michail
30
and shown in Figure 3. They represent a gradient of
Parameters of MAGLEV suspension system.
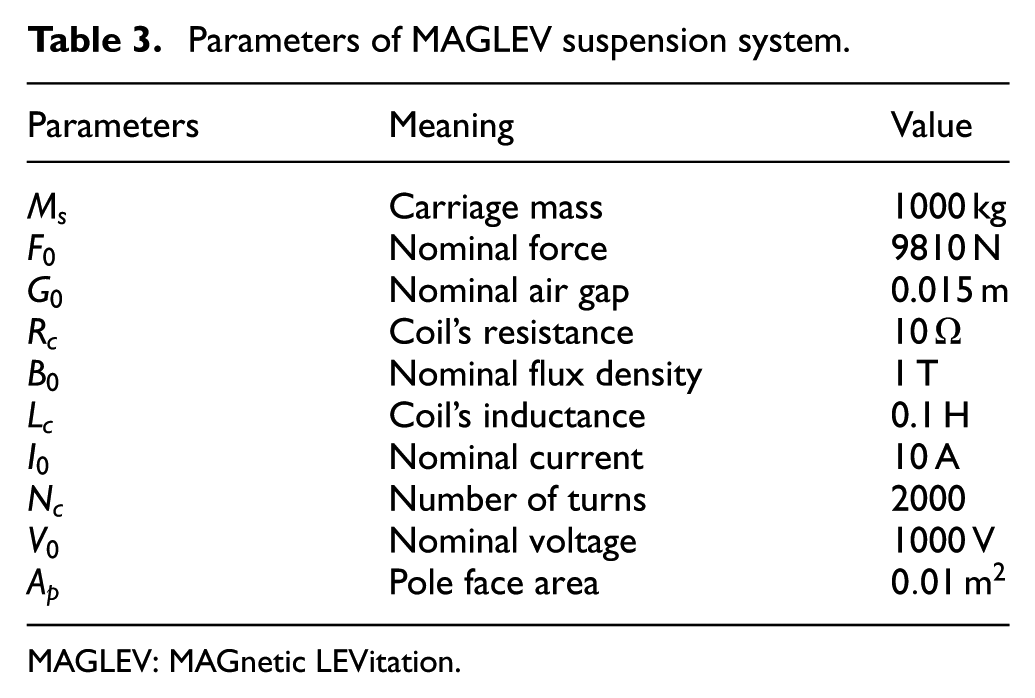
MAGLEV: MAGnetic LEVitation.

Track input to the suspension with a vehicle speed of 15 m/s and 5% gradient.
Constraints for MAGLEV suspension system.

MAGLEV: MAGnetic LEVitation.
Control design
In order to implement the proposed method for the MAGLEV system, the following coordinate transformation is introduced

where
Using this coordinate transformation, the MAGLEV system can be rewritten as follows

where

The following extended DO (9) is employed to estimate the disturbance in the MAGLEV system.
In order to use the proposed method for high-order system (33), the backstepping method is also applied to design the control law.
First, the proposed method is used for the states
Second, the virtual control

Let
where
Simulation results
In order to evaluate the performance of the proposed method, the proposed method is compared with the DO-SMC and the EDO-MSMC. The sliding surface of the DO-SMC method for the MAGLEV suspension system is designed as follows

where the parameter

where

The sliding surface of the EDO-MSMC method for the MAGLEV suspension system is designed as follows

where
The EDO can be obtained as follows

where
Accordingly, the corresponding EDO-MSMC law is as follows

The initial state values of MAGLEV suspension system (26) are set as
Control parameters for the MAGLEV suspension in case 1.

MAGLEV: MAGnetic LEVitation; DO-SMC: sliding mode control with disturbance observer; EDO-MSMC: extended disturbance observer–modified sliding mode control; EDO-ASMC: adaptive sliding mode control with extended disturbance observer.

Comparison among DO-SMC, EDO-MSMC, and EDO-ASMC in the MAGLEV suspension system: (a) plot of the current i, (b) plot of vertical velocity
The other deterministic input components, as shown in Figure 5, are considered. They represent the jerk level which is sine wave with magnitude of

Track input to the suspension with a jerk level with sine wave.
Control parameters for the MAGLEV suspension in case 2.

MAGLEV: MAGnetic LEVitation; DO-SMC: sliding mode control with disturbance observer; EDO-MSMC: extended disturbance observer–modified sliding mode control; EDO-ASMC: adaptive sliding mode control with extended disturbance observer.
The response curves of the states and inputs in this case are shown in Figure 6. By comparing with the first simulation scenario, it can be observed from Figure 6 that the states of the MAGLEV system for the proposed EDO-ASMC have hardly affected by the mismatched disturbance with time variation, while the states of the system for the DO-SMC and the EDO-MSMC are severely affected by the mismatched disturbance. Moreover, with respect to the DO-SMC and the EDO-MSMC, the chattering in the sliding mode of the proposed EDO-ASMC is significantly eliminated.

Comparison among DO-SMC, EDO-MSMC, and EDO-ASMC in the MAGLEV suspension system: (a) plot of the current i, (b) plot of vertical velocity
Conclusion
In this article, a new disturbance attenuation–based SMC approach has been proposed to reduce the effect of mismatched uncertainties on the control system. A new adaptive sliding mode surface, in which the disturbance estimation is designed according to the sliding motion along the sliding surface, is proposed for driving the states to the desired equilibrium point in the presence of mismatched uncertainties. Both numerical and application examples have been simulated to demonstrate the effectiveness as well as the superiorities of the proposed method. The results have shown that the proposed method exhibits the excellent properties of dynamical performance and chattering reduction compared with other nonlinear SMC methods. Further research will focus on extending the proposed approach to high-order systems.
Footnotes
Academic Editor: Nima Mahmoodi
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported in part by the National Natural Science Foundation of China (No. 61473226).