
Abstract
A full-scale prototype of sealed ocean kinetic energy harvester for underwater mooring platforms was tested on a Stewart platform, a 6-degree-of-freedom ocean motion simulation device, and the overall sealed ocean kinetic energy harvester concept was confirmed. Initial results were collected and significant insights discovered. Experimental results show that the optimal resonant frequency for maximum power output is 1 Hz at high load resistances (large amplitude), or is 1.1 Hz at low load resistances (small amplitude), due to the nonlinear effect. It also demonstrates that the optimal output power takeoff damping is 300 Ω at 1.1 Hz resonant frequency or is 600 Ω at 1.0 Hz resonant frequency or is 100 Ω at nonresonant frequencies. Moreover, the fluctuation impulses in output power curve indicate that the sealed ocean kinetic energy harvester needs great overload capability, and the energy storage system is essential to even out power fluctuations.
Keywords
Introduction
Underwater mooring platforms (UMPs with 0.5 m diameter and 3–5 m length) are a kind of underwater devices that are traditionally battery powered. 1 However, the energy is limited, and the UMPs cannot work for a long time.2,3 To extend the operation time, it seems possible to extract energy from the ocean and then charge the batteries in the UMPs.4,5 Recently, some researchers have put effort to exploit ocean thermal energy and ocean current energy.6,7 However, the utilization of ocean thermal energy requires the underwater platform to follow saw-tooth-like trajectories, 8 and it is not suitable for UMPs, which are expected to perform fixed-point monitoring underwater. The ocean current converter for UMPs has to be exposed in the ocean environment and would inevitably encounter some problems such as seawater corrosion, dynamic sealing and marine biological attachment. 7 These problems have stimulated the development of sealed ocean kinetic energy harvester (SOKEH), which is enclosed into the UMPs and are driven by UMP motion excitations induced by vortex, wave, ocean current, or other ocean kinetic energies. Krawczewicz and Greene 9 have teamed to develop novel sealed ocean kinetic energy harvesting techniques for sonobuoys and other floating electronic systems for US Navy. Micheson 10 has investigated a pendulum-type SOKEH for unmanned surface vehicles. However, these SOKEHs have not eliminated mechanical energy conversion procedures such as gear boxes and hydraulic systems though generally producing larger machines. 11
In this article, in order to solve these problems, a directly driven SOKEH was proposed and fabricated. The generator of the SOKEH, acting as a power takeoff (PTO) in this article, is directly driven by an eccentric rocking pendulum due to the inertia effect. A series of experiments were tested to prove this concept and prototype.
SOKEH and experiment setup
The SOKEH that is being developed at Institute of Underwater Vehicle at Northwestern Polytechnical University was started in the year 2012. Since its start, the project has produced a theoretical foundation as well as an experimental prototype.12,13 This full-scale prototype was tested on a Stewart platform, which is an ocean motion simulation device that has 6 degrees of freedom, with a size of 2 m length, 2 m width, and 1 m height. This article presents and discusses the initial results and insights on the physical operation of this SOKEH prototype.
The SOKEH is installed and enclosed into the UMP that can separate the SOKEH from the seawater. The SOKEH is mainly composed of an eccentric rocking pendulum and a rare earth permanent magnet generator. Figure 1 shows the schematic diagram of the device and the experiment setup. The generator is a 120 V–100 W three-phase AC motor, acting as PTO to convert the excitation motion energy of the eccentric rocking pendulum into electrical power, which was specially designed and fabricated for harvesting ocean kinetic energy. The overall dimensions of the permanent magnet generator are 420 mm diameter and 100 mm width. The whole parameters of the SOKEH are shown in Table 1. The eccentric rocking pendulum is directly connected to the motor rotor shaft of the permanent magnet generator, acting as an energy harvesting component when the UMP is in swing motion state induced by vortex, wave, or other ocean motions. It is assumed that the swing motion is in the vertical plane that is perpendicular to the motor rotor shaft of the permanent magnet generator and the horizontal plane. Other direction motions in this article were not taken into consideration in our experiments, but these problems should be further investigated in future.

The SOKEH: (a) schematic diagram and (b) experiment setup.
The parameters of the SOKEH. 13

SOKEH: Sealed Ocean Kinetic Energy Harvester
Theoretical investigation
According to the moment of momentum theorem, the following governing equation of the eccentric pendulum trajectory can be obtained

In the above equation, linear displacements

where
According to the relative angular velocity


The phase electromotive force of the rare earth permanent magnet generator can be determined as follows 13

wherein

Substituting equation (6) into equation (5),

Experimental results and discussion
The oscillating motion of the eccentric rocking pendulum changes in speed, amplitude, and direction as the eccentric rocking pendulum moves forth and back induced by the UMP swing motion excitation under complex ocean environment. This causes a fluctuating form of the phase voltage of the rare earth permanent magnet generator. However, the amplitude of the phase voltage is varying at all the time. The fluctuating from phase voltage inevitably leads to fluctuating forms of the voltage and power with load. Figure 2 shows all the fluctuating form curves under a sinusoidal swing motion excitation with 1 Hz frequency, 8° amplitude, and 300 Ω resistively coupled load. The zero amplitude moment of the phase voltage curves separating the impulses represents standstill of the eccentric rocking pendulum, which results in the zero output power at load and in most cases corresponds to the changing points of the eccentric rocking pendulum at the each maximum oscillating motion amplitude position.11,14 The fluctuating forms of the voltage and power at load are typical, 14 and there are two voltage peaks and power peaks in a single oscillating motion period.

The 10-s time window of the SOKEH activity shows (a) the sinusoidal waveforms of the phase voltage, (b) the voltage at load after rectification and filtration, and (c) the output power at a load of the total three phases of the generator.
The polar distance of permanent magnet generator rotor is 47 mm, and the number of the pole pairs is 10, which make sure the permanent magnet generator could produce much more sinusoidal waveforms under a low frequency (<1 Hz) and small amplitude oscillating motion conditions. Figure 2(a) shows the sinusoidal waveforms of the phase voltage, whereas the amplitude magnitude of sinusoidal waveform repeatedly becomes bigger and smaller. The reason for this phenomenon is due to the varied speed of the eccentric rocking pendulum. The amplitude magnitude of sinusoidal waveform repeatedly turns into zero, which reveals that the eccentric rocking pendulum is turning its oscillating motion direction.
The voltage at the load is shown in Figure 2(b). It is produced after rectifying and filtering three phase voltages through a three-phase bridge rectifier circuit and a filter circuit.15,16 The three-phase bridge rectifier circuit could convert the three AC phase voltages to a unidirectional pulsating voltage. However, the unidirectional pulsating voltage includes some harmonics. The filter circuit is applied to solve this problem, which could restrain these harmonics and smooth the rectified voltage.12,13 Therefore, the processed pulsating voltage could be directly loaded to a resistively coupled load.
The output power at load arising from the voltage is shown in Figure 2(c). The output power curve is of characteristic shape. The calculation of the average output power at load is 6.765 W, and the peak output power is nearly 15 W. The comparison shows that the peak output powers are two or more times higher than the average power. The great differences between average output power and peak output powers are inevitable consequences of the output power at load due to the absence of intermediate energy storage system between the harvester and the coupled load.17,18 Therefore, the fact shows that the intermediate energy storage system has great implications. Hence, it should be designed with a redundant capacity to handle output power peaks two or more times higher than the average output power, which would be applied to even out output power pulses and to transform the converted power to the requirements of the user or the electric system.19,20 Some optimization control system also should be applied to reasonable program and manage the energy.21–25
The amount of output power extracted by the SOKEH is dependent on the swing motion excitation parameters and damping of the energy conversion system. The swing motion excitation parameters are dependent on the overall dimensions of the UMP and the complex ocean environment. The resistively coupled load, together with the generator and circuits, produces the output PTO damping.
For many given configuration of wave energy converters, there will be an optimal output PTO damping corresponding to the maximum power absorption.26,27 However, the given SOKEH has some different optimal output PTO damping due to the nonlinear effect. The optimal condition was researched by running the SOKEH at 10 different resistively coupled loads with varying swing motion excitation frequencies on the Stewart platform for some time at 6° excitation amplitude and 300 Ω resistively coupled load. Figure 3 shows the test results. Every experimental sample represents a 3-min average. The results show that the SOKEH has two resonant frequencies, one is 1.1 Hz at low resistively coupled loads from 100 to 400 Ω, and the other is 1 Hz at high resistively coupled loads from 500 to 800 Ω. The resonant frequency declines with the increase in the resistively coupled load. The nonlinear effect is the real reason for which the repeatedly oscillating motion of the eccentric pendulum has changed to the large amplitude vibration with the increase in the resistively coupled load, and the resonant frequency declines due to the nonlinear motion. Therefore, the experimental results show that the optimal output PTO damping is 300 Ω at 1.1 Hz resonant frequency, 600 Ω at 1 Hz resonant frequency, and 100 Ω at nonresonant frequencies. However, for other configurations of the SOKEH, this will vary with the output PTO damping of the energy system. And the nonlinear effect should be further investigated in future.

Output power varies with excitation frequencies.
The experimental results on four different swing motion excitation amplitudes at different swing motion excitation frequencies with 300 Ω resistively coupled load are presented in Figure 4. Every experimental sample represents a 3-min average. Figure 4 shows that the larger the swing motion excitation amplitudes, the higher the output power. The resonant frequency is always 1.1 Hz at different swing motion excitation amplitudes.
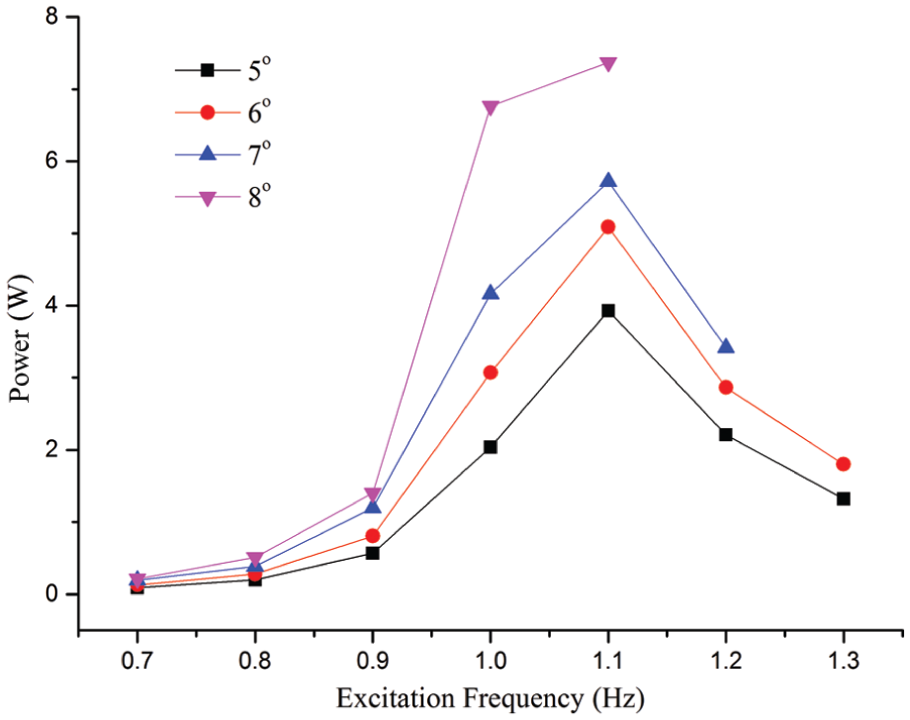
Output power varies with excitation amplitude.
This prototype SOKEH for UMPs was built to test the overall concept as a means of extracting energy from the ocean. It was not anticipated to do this with optimal performance. Hence, there are a number of aspects that can be applied to improve the performance of the output power of the SOKEH.
Conclusion
In summary, a full-scale prototype of an SOKEH, which contains a permanent magnet generator and an eccentric rocking pendulum, was fabricated and tested. The overall SOKEH concept was confirmed. Initial results and significant insights are obtained. The results show that the optimal resonant frequency for maximum power output is 1 Hz at high load resistances or 1.1 Hz at low load resistances because of the nonlinear effect. It also indicates that the optimal output PTO damping is 300 Ω at 1.1 Hz resonant frequency or 600 Ω at 1 Hz resonant frequency or 100 Ω at nonresonant frequencies. Moreover, in order to be feasible for producing electricity for an electric system, the fluctuation impulses in output power curve indicate that the SOKEH needs great overload capability, and the energy storage system is essential to even out power fluctuations. The SOKEH prototype will be further researched and optimized as the future goal is to produce an inexpensive, robust technology for the production of renewable energy from the ocean.
Footnotes
Handling Editor: Yongping Pan
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by the National Natural Science Foundation of China (no. 51179159).