
Abstract
This article studies an output feedback attitude tracking control problem for rigid spacecraft in the presence of parameter uncertainties and external disturbances. First, an anti-unwinding attitude control law is designed using the integral sliding mode control technique to achieve accurate tracking responses and robustness against inertia uncertainties and external disturbances. Next, the derived control law is combined with a suitable tuning law to relax the knowledge about the bounds of uncertainties and disturbances. The stability results are rigorously proved using the Lyapunov stability theory. In addition, a new finite-time sliding mode observer is developed to estimate the first time derivative of attitude. A new adaptive output feedback attitude controller is designed based on the estimated results, and angular velocity measurements are not required in the design process. A Lyapunov-based analysis is provided to demonstrate the uniformly ultimately bounded stability of the observer errors. Numerical simulations are given to illustrate the effectiveness of the proposed control method.
Keywords
Introduction
Attitude control of rigid spacecraft has become one of the most interesting problems among researchers during the past decades. Spacecraft control problems, for example, satellite maneuvering, satellite surveillance, spacecraft formation flying, and spacecraft on-orbit service 1 are challenging control problems. Since dynamic and kinematic equations of spacecraft are coupled and highly nonlinear, an attitude controller design is usually difficult. In practical situations, the model parameters of a spacecraft may not be acquired exactly and the spacecraft always faces model uncertainties and external disturbances. Thus, the attitude control of spacecraft requires solution of very challenging and interesting mathematical problems of great practical importance.
A large variety of nonlinear control schemes have been employed to improve the closed-loop performance of the attitude tracking control system such as adaptive attitude control2,3 sliding mode control (SMC),4,5 output feedback control,6,7 linear matrix inequality-based control, 8 passivity-based control,9,10 and fuzzy control. 11 Among these methods, SMC has been successfully employed12,13 to solve attitude control problem especially in the presence of model uncertainties and external disturbances satisfying the matched uncertainty condition. 14 SMC can provide a lot of attractive properties, such as insensitivity to model uncertainty, disturbance rejection, and fast dynamic response. However, the control techniques mentioned above only guarantee asymptotic stability and convergence in infinite time. The ability of control methods to offer fast maneuver performance is highly desirable in many space missions.
To obtain fast maneuver performance, finite-time control (FTC) methods are usually considered. It is well known that FTC methods can drive the system states to the equilibrium in finite time. This leads to rapid convergence and strong disturbance rejection properties. The Lyapunov-based approach and homogeneous theory are two main methods to design a finite-time controller. Based on homogeneous theory, finite-time controllers have been designed in previous studies.15–18 Du et al. 17 have developed finite-time attitude tracking and attitude synchronization using a power integrator. The finite-time stability of the closed-loop system is achieved but the robustness is not strong. In Du and Li, 18 local and global continuous saturated finite-time controllers have been developed based on the homogeneous method but inertia uncertainties are not considered in the design. The Lyapunov-based approach often depends on terminal sliding mode control (TSMC). Recently, TSMC has been proposed in which a nonlinear sliding surface is synthesized to obtain convergence of system states in finite time.19,20 TSMC has been employed by previous studies21–23 to design a robust FTC for spacecraft attitude tracking. A major drawback of TSMC is the singularity problem. To overcome this problem, the nonsingular TSM (NTSM),24–27 time-varying sliding mode, 28 and integral sliding mode control (ISMC)29,30 were constructed for developing attitude control laws. To compensate for mismatched uncertainties, continuous dynamics SMC and continuous NTSM control have been developed in Yang et al.31,32 In Yang et al., 33 a disturbance observer-based SMC approach has been designed to handle mismatched uncertainties.
Another enhanced version of SMC is higher-order sliding mode control (HOSMC).34–36 HOSMC maintains the disturbance attenuation ability of SMC and also yields improved accuracy and performance. A practical implementation of HOSMC has been successfully applied to many real-life applications37,38 and spacecraft attitude tracking maneuver. 39 Recently, various FTC laws have been developed using second-order sliding mode control (SOSMC) concepts. A smooth SOSMC law has been applied by Shtessel et al. 40 to a missile guidance system. In this article, the homogeneity approach15,16 has been used to prove the finite-time convergence of the closed-loop system. Two SOSMC schemes have been designed by Pukdeboon 41 to solve the attitude tracking control problem. In this article, a strong Lyapunov function 42 was used for proving the finite-time stability of the closed-loop system. However, adaptive output feedback integral SMC of spacecraft attitude tracking has been rarely studied in practical implementation.
Most of the above-mentioned control methods are designed based on full state feedback and require the measurement of angular velocities. However, in practice, the use of angular velocity sensors may be restricted due to cost/weight constraints. Therefore, a partial-state feedback control law that does not require measurements of angular velocities is practically useful and highly desirable. To the best of the authors’ knowledge, there are no application of the adaptive integral sliding mode control (AISMC) technique to the solution for attitude tracking of spacecraft without unwinding when measurements of angular velocities are not available. In this article, an AISMC scheme is designed for attitude tracking control of spacecraft with inertia uncertainties and external disturbances. Based on NTSM and adaptive parameter-tuning strategy, the finite-time convergence to a small neighborhood around the sliding surface is realized. A sliding mode observer is designed to estimate unknown variables, so angular velocity measurements are not required. The stability and robustness of the proposed method are verified using Lyapunov stability theory.
The main contributions of this article are as follows:
A new adaptive integral sliding mode controller is developed to force the attitude of a rigid spacecraft to track the desired attitude in finite time and achieve high tracking precision performance in the presence of inertia uncertainties and external disturbances. Moreover, this controller can eliminate the unwinding phenomenon.
A new finite-time sliding mode observer is developed to estimate the first time derivative of quaternion. The finite-time convergence of error dynamics is proven. Then, the estimate results are used to develop a new adaptive output feedback controller. This avoids the measurements of the angular velocities.
This article is organized as follows. Section “Nonlinear model of spacecraft and problem formulation” describes spacecraft attitude dynamics and kinematics.43,44 The problem formulation is also given. The proposed AISMC algorithms for a rigid spacecraft are discussed in section “Finite-time attitude control via ISMC.” In section “Output feedback via sliding mode observer,” a new sliding mode observer is designed such that the observer error dynamics converge to a bounded region containing the origin. In section “Simulations,” simulation results are presented to show the performance of the proposed controller. In section “Conclusion,” we present conclusions.
Nonlinear model of spacecraft and problem formulation
Spacecraft attitude dynamics and kinematics
The unit quaternion is employed to represent the attitude of the spacecraft for global representation without singularities. It is widely used to represent the attitude kinematics of rigid spacecraft owing to its non-trigonometric expression and nonsingular computations. 45 The unit quaternion Q is defined by

where


where

Kinematics of attitude errors
To define the attitude error using quaternions, we let the desired quaternion be

satisfying the constraint

The kinematics for the attitude error of a rigid spacecraft 43 can be expressed as

where
Dynamic equations of the error rate
The dynamic equation for a rigid spacecraft rotating under the influence of body-fixed devices is given by Edwards et al. 35 as

where
Next, let us denote

Assumption 1
We assume that the inertia matrix in equation (7) is in the form
Now, the spacecraft attitude dynamics become

where
Assumption 2
The total uncertainty vector
Remark 1
For Assumption 2, it is reasonable because the external unknown disturbances including environmental disturbance, solar radiation, and magnetic effects are all bounded in practice.
Lemmas
We now give some lemmas that will be used in later sections.
Lemma 1
If

Lemma 2
Suppose

where
Lemma 3
For any numbers

where the settling time can be estimated by

Lemma 4
Considering the system

Then, the trajectory of this system is practical finite-time stable.
Problem statement
In this article,

where T is a finite time and
Finite-time attitude control via ISMC
In this section, a novel controller is developed to achieve high-precision attitude tracking control. This control law is designed such that attitude tracking errors converge to a desired region in finite time. A proof of finite-time convergence of the closed-loop system is given based on Lyapunov stability theory.
For the spacecraft systems (5) and (8), we define the sliding surface as

where k is a positive constant. By the concepts of ISMC, we choose

where
We now consider the spacecraft systems (5) and (8) in the presence of the disturbance

where

with

is the switching control that is used to compensate for the disturbance. In equation (18), the
function

Next, the convergence of the system state errors to the origin is analyzed in the following theorem.
Theorem 1
Consider the spacecraft system in the presence of the disturbance
Proof
Premultiplying (14) by
Substituting equation
(15) into equation (19),

Consider the following candidate positive definite function

which satisfies the following

and
The first time derivative of

By Lemma 1 and Assumption 1, equation (23) becomes

which can be written as

where
In practice, the upper bound of the disturbance

where
In equation
(26), an adaptive law

with
Remark 2
The adaptive updating provided in equation (26) dynamically adjusts the
compensation for the system uncertainties, rather than offering the precise estimate of
Next, the convergence of the system state errors to the origin is analyzed in the following theorem.
Theorem 2
Consider the spacecraft system in the presence of the disturbance
Proof
Substituting equation
(26) into equation (19),

Consider the following candidate positive definite function

where
Differentiating equation (29), one has

Substituting equations (27) and (28) into equation (30), we obtain

Using
Note that

Applying Young’s inequality with

where

If

Thus, equation (34) becomes
where
If

where
Combining equations (36) and (38), one obtains

where

which can be further written as

It follows from equation (41) that there must exist

According to Lemma 4,

in finite time which implies that the trajectories of the closed-loop system are bounded
in finite time
where
Output feedback via sliding mode observer
In this section, a sliding mode observer is designed based on sliding mode technique.
Observer design
The proposed finite time observer is given by

where the second-order differentiator signal

for
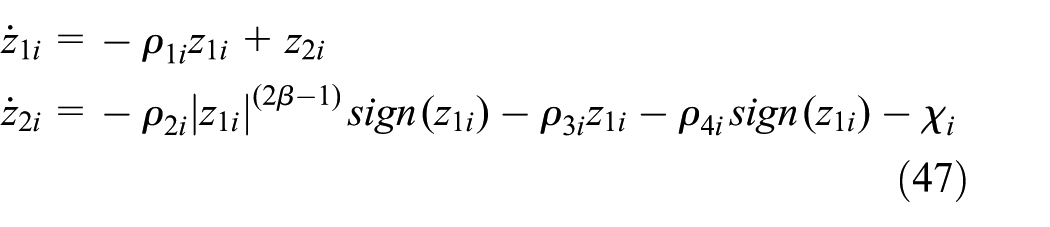
Remark 3
The system (47) is non-homogeneous and the homogeneity method cannot be applied to prove the finite-time stability. However, a rigorous Lyapunov analysis 42 can be used to ensure the uniformly ultimately bounded (UUB) stability in finite time of the proposed observer.
Next, to ensure the finite-time convergence of the proposed observer (45), we prove that the observer error states in (47) converge to the region containing the origin in finite time.
Theorem 3
Consider the observer error system (47), and the bounded differentiable signal
Proof
Consider the following candidate strong Lyapunov function
which can be written as

where

It satisfies

where
Taking time derivative to (48), one obtains

Substituting equation (47) into equation (51), one has

Multiplying out brackets and using algebraic manipulation, one obtains
Thus, the derivative of

where

and

With positive values of
Therefore, we have

We can change equation (48) into the following form

Using equation (50), it can be further obtained from (56) that

If the observer gains are selected such that
Controller design
Output feedback attitude tracking controllers can be designed using the observer outputs

Note that from the problem statement, the measurements of quaternion are available. Thus,
For the output feedback controller law, the chosen sliding surface for the controller is

where

where
We next design a controller with observer under inertia uncertainties, external disturbances, and control input saturations. Consider the rigid spacecraft system with actuator constraints

where

where

Using equations (61) and (62), one has

Substituting equation (63) into equation (60), one obtains

According to Theorem 2, one can see that if
Remark 4
With the use of the sliding surface (14) or (58), the unwinding phenomena can be
avoided. When the sliding surface
Remark 5
For a given practical system, the input difference
Simulations
An example of a rigid-body satellite given by Lu et al. 13 is presented with numerical simulations to demonstrate the comparison of the developed adaptive output feedback law (58) and the adaptive sliding mode control (ASMC) method in Lu et al. 13 The spacecraft is assumed to have the nominal inertia matrix

and the parameter uncertainties

The attitude control problem is considered in the presence of external disturbance

In this numerical simulation, we assume that the desired angular velocity is given by
Numerical simulations are given as follows.
Case I
We check whether both controller (59) and ASMC method in Lu et al.
13
can prevent the
unwinding phenomenon or not. The initial and desired conditions of quaternion are set as
For the ASMC method in Lu et al.,
13
simulations are carried out with the parameters given as
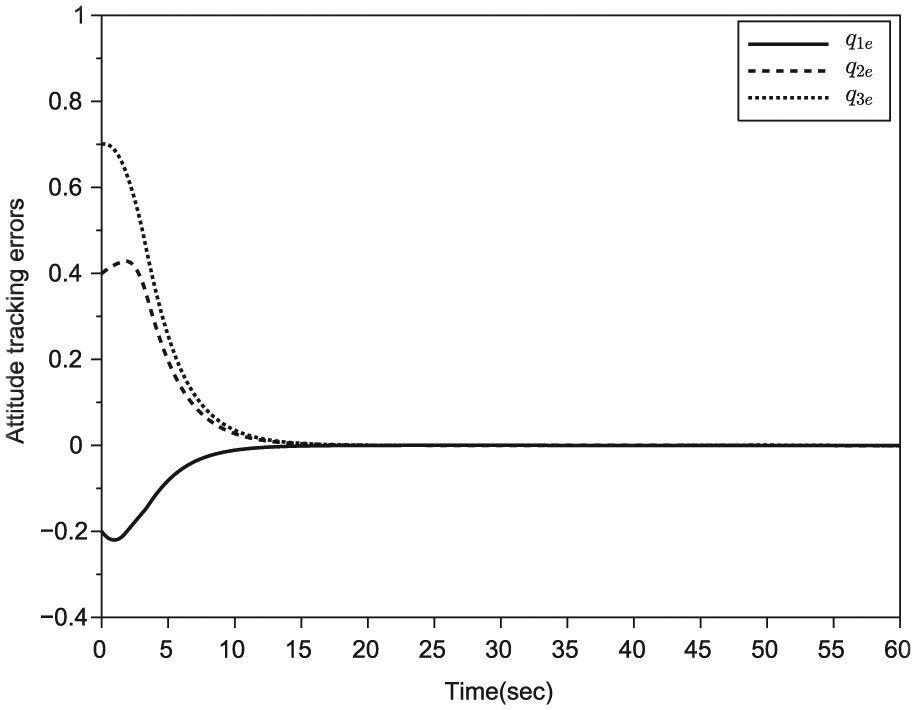
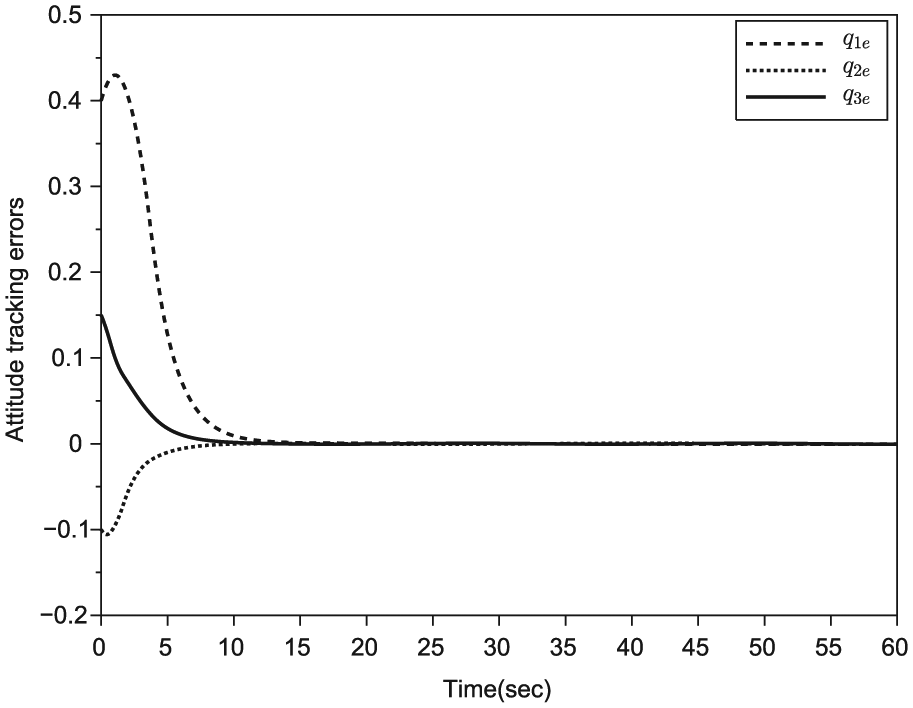
Figures 1 and 2 show that the quaternion errors
obtained by the controller (59) are smoother than the ASMC method in Lu et al.
13
From Figure 3, one can see that the
unwinding phenomenon occurs when the ASMC method is used. Since the initial condition of

Attitude tracking errors under ASMC—Case I.
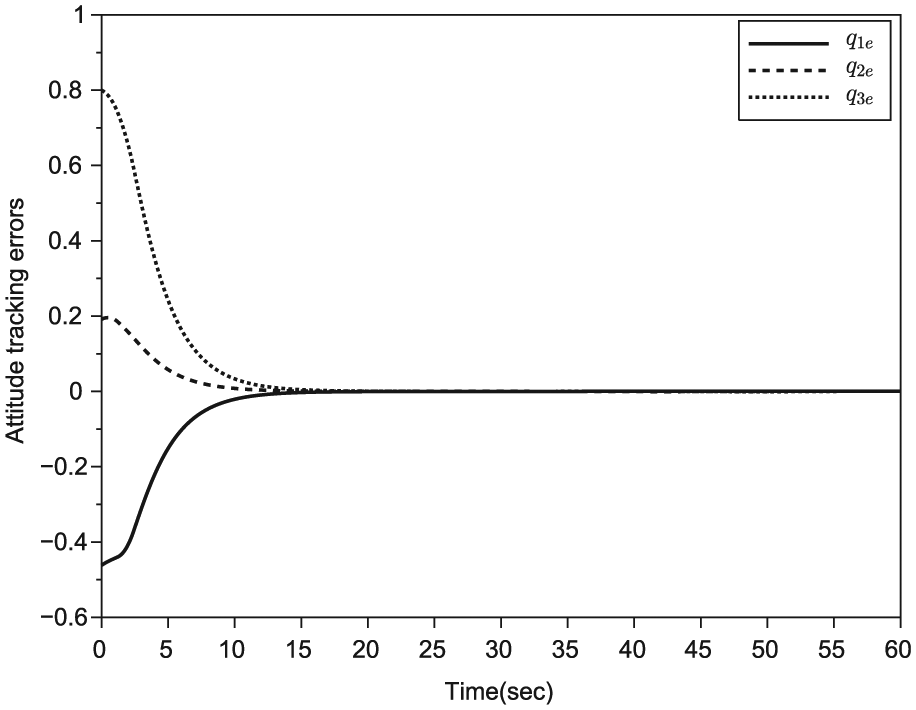
Attitude tracking errors under the controller (59)—Case I.

Scalar quaternion errors under ASMC—Case I.

Scalar quaternion errors under the controller (59)—Case I.

Angular velocity errors under ASMC—Case I.

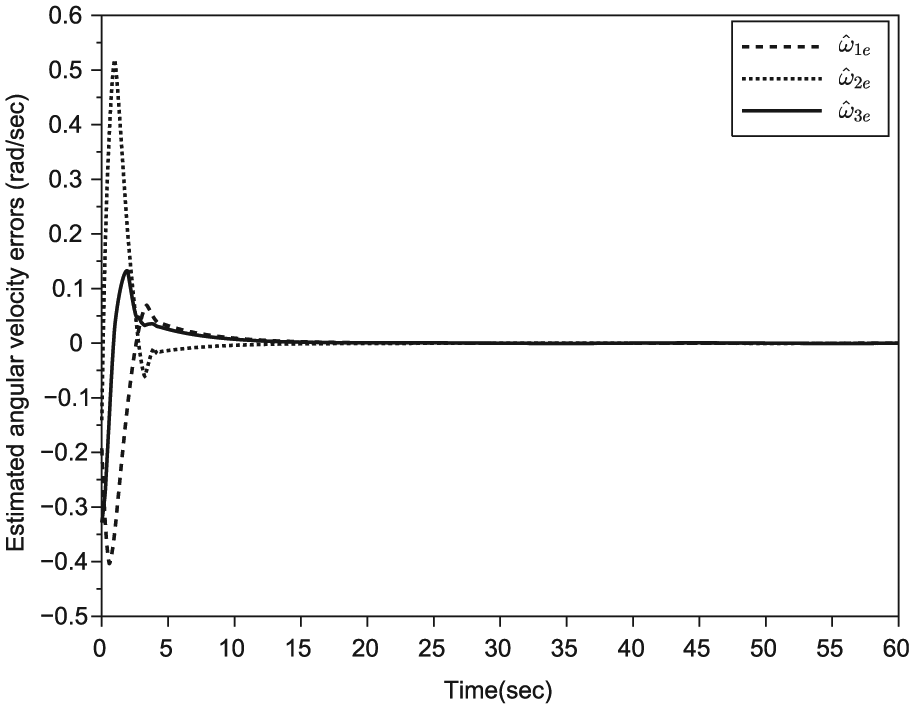
Estimated angular velocity errors under the controller (59)—Case I.

Torque input under ASMC—Case I.
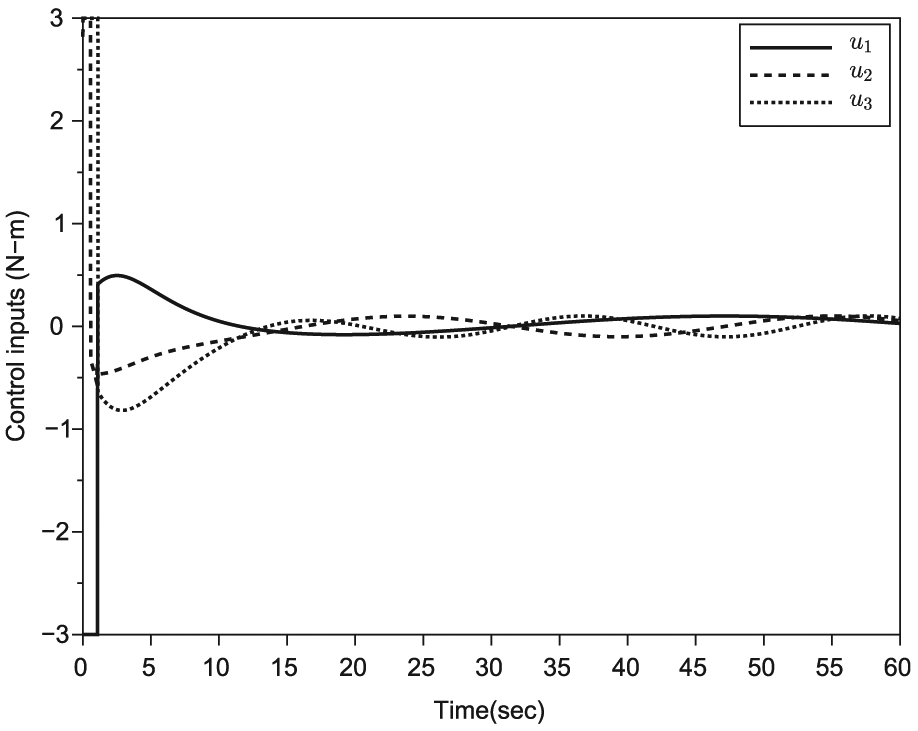
Torque input under the controller (59)—Case I.

Estimated parameters under ASMC—Case I.

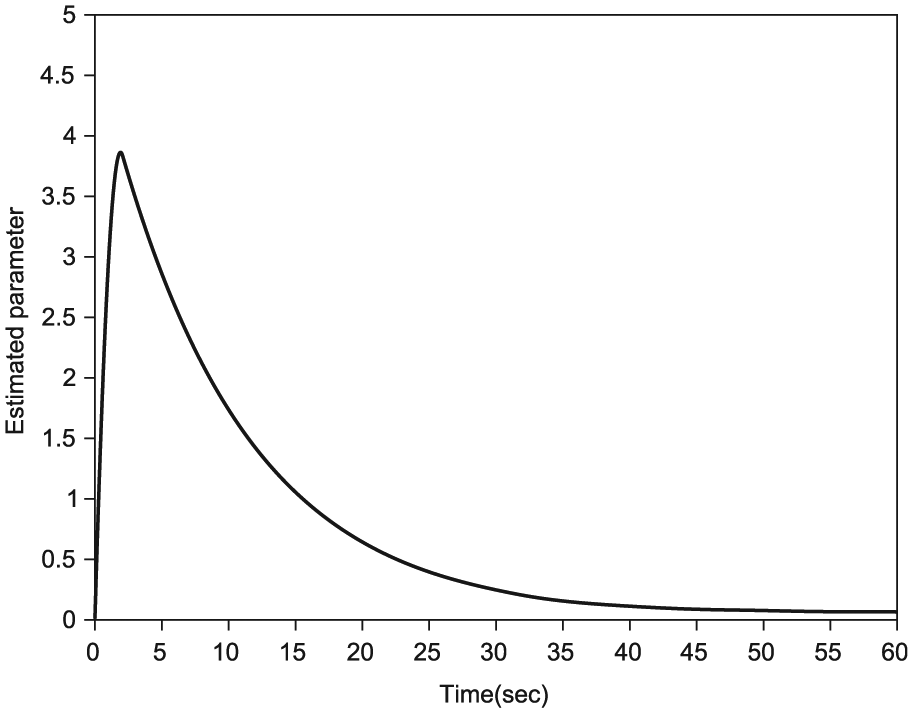
Estimated parameters under the controller (59)—Case I.
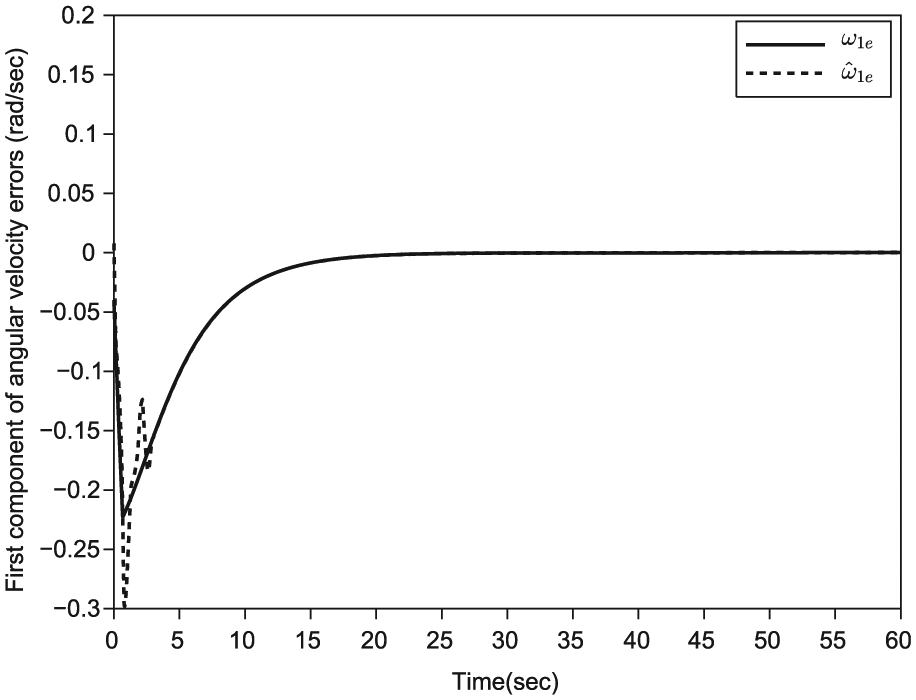
First component of the estimated angular velocity errors—Observer (45).

Second component of the estimated angular velocity errors—Observer (45).
Case II
The controller (59) and the ASMC in Lu et al.
13
are compared based on responses for
disturbance rejection in simulation. The initial and desired conditions of quaternion are
set as
As shown in Figures 14 and 15, both controllers have good disturbance rejection abilities. The effect of uncertainties and disturbances is not shown. The controller (59) gives smoother responses of attitude tracking errors when compared to those of the ASMC method in Lu et al. 13 Similarly, Figures 16 and 17 depict good responses of angular and estimated angular velocity errors obtained by the controller (59) and the ASMC method, respectively. From Figures 18 and 19, one can see the control torques obtained by the controller (59) fastly converge to the steady-state levels. As shown in Figures 20 and 21, the estimated parameters for the ASMC method are finally bounded by constant values, while the estimated parameter for the controller (59) converges to a small neighborhood of zero.

Third component of the estimated angular velocity errors—Observer (45).
Attitude tracking errors under ASMC—Case II.

Attitude tracking errors under the controller (59)—Case II.

Angular velocity errors under ASMC—Case II.

Estimated angular velocity errors under the controller (59)—Case II.

Torque input under ASMC—Case II.

Torque input under the controller (59)—Case II.

Estimated parameters under ASMC—Case II.
Case III
We use another set of initial conditions for quaternion and angular velocities. The
performance of the controller (59) and ASMC in Lu et al.
13
are compared. The initial and desired
conditions of quaternion are set as
As shown in Figures 22 and 23, the controller (59) achieves smoother attitude tracking errors than those of ASMC in Lu et al. 13 Figure 24 depicts finite-time convergence to zero of the angular velocity errors. Similarly, from Figure 24, we can see that controller (59) guarantees finite-time convergence to zero of the estimated angular velocity errors. As shown in Figures 26 and 27, the control torques obtained by the ASMC method in Lu et al. 13 show higher variation during the first 10 s. Thus, good performance of the controller (59) is evident.
Estimated parameters under the controller (59)—Case II.
Attitude tracking errors under ASMC—Case III.

Attitude tracking errors under the controller (59)—Case III.

Angular velocity errors under ASMC—Case III.
Estimated angular velocity errors under the controller (59)—Case III.

Torque input under ASMC—Case III.
The simulation results obtained from the controller (59) and the ASMC method in Lu et al. 13 have been compared. Several initial conditions of quaternion and angular velocities are considered. The controller (59) gives smoother responses of quaternion tracking errors and smaller magnitude of torque is required for the first 10 s. Moreover, this controller eliminates the unwinding phenomenon. From simulation results, the controller (59) seems to be a more suitable scheme to deal with practical high-precision attitude tracking control of a rigid spacecraft because it relaxes the requirements of the upper bound of uncertainties and disturbances and provides good tracking outputs.

Torque input under the controller (59)—Case III.
Conclusion
In this article, an adaptive output feedback ISMC law has been developed for the attitude tracking control problem of a rigid spacecraft. In the presence of external disturbances and inertia uncertainties, the proposed attitude control strategy achieves the control objective and eliminates the unwinding phenomenon. Using Lyapunov stability theory, we have proved that the error dynamics converge to a desired region containing the origin in finite time. Besides, a new sliding mode observer has been developed to estimate the time derivative of attitude errors. Then, with the estimated results, we have derived a new adaptive output feedback integral sliding mode attitude controller without the need of angular velocity measurements. Numerical simulations on attitude control of a spacecraft model are also provided to demonstrate the performance of the proposed controller.
Footnotes
Academic Editor: Bin Xu
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This research was funded by King Mongkut’s University of Technology North Bangkok (Contract no. KMUTNB-60-GOV-67).