
Abstract
This paper proposes an adaptive predefined-time accurate anti-unwinding attitude controller for a spacecraft with uncertain inertia. The novelty of the proposed algorithm lies in that the spacecraft attitude error is regulated to exact zero after a predefined settling time, which is an explicit parameter in the control algorithm. A time mapping function containing the predefined settling time is introduced, thus transforming the time scale of the original attitude control system. Then a composite barrier Lyapunov function is constructed to avoid the unwinding phenomenon in the attitude control process, and an adaptive backstepping attitude controller is designed based on the attitude system in the new time scale. The stability analysis of the attitude system is carried out based on LaSalle-Yoshizawa theorem, and it is proved that the attitude quaternion and angular rate can converge to zero accurately within the desired predefined time without using the spacecraft inertia information. Numerical simulation results show the effectiveness and superiority of the proposed controller.
Keywords
Introduction
With the current rapid advancement of space science and technology, spacecrafts, such as artificial satellites and space stations, are critical tools for space exploration. Meanwhile, the number of space debris has risen considerably as a result of satellite failure, the shedding of launch vehicle bodies, and the explosion and collision of numerous types of spacecrafts. According to the data in Refs.,1,2 the earth orbit is populated with over 36,500 orbital debris objects exceeding 10 cm, around a million fragments in 1–10 cm range. As a result, it is critical for some spacecrafts for capture to trap space debris and transport it into the atmosphere for destruction, freeing up orbital resources and ensuring the flight safety of other spacecrafts. Therefore, spacecraft capture and control technology has been one of the research hotspots. 3 The captured space debris are usually non-cooperative targets that have been affected by solar light pressure and gravity gradient for a long time, resulting in a complicated rotational motion, 4 which may cause the rotation of the integrated spacecraft system after a capture mission. To ensure the long-term on-orbit service of the spacecrafts for capture, their attitude must be stabilized rapidly for the next mission. 5 In this regard, researchers have developed numerous control approaches, including sliding-mode control, 6 adaptive control,7,8 robust control, 9 and prescribed performance control.10,11
Because the inertia information of the captured non-cooperative targets is usually unknown, the general inertia of the integrated spacecraft system after capture is uncertain. Refs.12–14 regarded the inertia uncertainties of the integrated spacecraft system after capture as bounded perturbations, and they developed attitude control techniques using the known basis inertia. However, for the spacecrafts after executing capture missions frequently, the discrepancy between their true inertia and the known basis inertia may be substantial, so it may be difficult for the control algorithms based on the basis inertia information to fulfill the attitude accuracy requirements. 15 As a result, if the spacecraft attitude control issue with uncertain inertia is considered, adaptive control technique is always employed.16–18 Lin and Zhang 16 proposed a robust adaptive attitude controller, using neural networks to approximate the inertia uncertainty. Shi et al. 17 developed an adaptive sliding mode attitude control technique for a spacecraft with uncertain inertia. Zhang and Li 18 proposed an adaptive law to estimate the unknown inertia parameter in a spacecraft formation system.
The control efficiency is another problem that should be considered in the spacecraft attitude control system after capturing non-cooperative targets. Zhao et al. 19 and Ye et al. 20 proposed finite-time nonsingular sliding mode attitude control algorithms. Gao et al. 21 and Sun et al. 22 proposed fixed-time fast attitude control algorithms for spacecraft systems, considering actuator faults and quantized input signal, respectively. Although the finite-time and fixed-time control methods can improve the attitude control efficiency, the settling times of spacecraft attitude control systems under the traditional finite-time control methods19,20 were related to the initial attitude errors, and the settling times of spacecraft attitude control systems under the fixed-time control methods21,22 were affected by several control parameters. Thus, it may be difficult to know and set the upper bound of settling time directly by using the traditional finite-time and fixed-time spacecraft attitude control methods.19–22
In recent years, researchers have focused on a new class of systems called predefined-time stable systems.23–27 The upper bound of settling time of a predefined-time stable system is an explicit parameter in the control algorithm, thus allowing users to know and set its value in directly and quantitatively. Because of this considerable advantage, predefined-time control has been applied to the spacecraft attitude control issue.28–35 Wang et al. 28 and Xie et al. 29 proposed predefined-time attitude controllers based on predefined-time Lyapunov dynamics. Shi et al. 30 and Su and Shen 31 applied prescribed performance control approach to limit the settling time and the steady error of attitude control systems into the desired ranges. Ye et al. 32 guaranteed that the spacecraft attitude tracking error converges to a region with predefined boundary within a predetermined settling time. When the inertia uncertainty is considered in the predefined-time attitude control issue, Sun et al. 33 designed a predefined-time attitude controller using the basis inertia information. Moreover, Xie et al.34,35 applied neural networks and Fuzzy logic systems to approximate inertia uncertainties, regulating attitude errors to the neighborhood of zero within predefined settling times. Although the issue of predefined-time attitude control was studied in several previous studies, it can be seen that it is difficult for the control methods in Refs.30–35 to achieve zero attitude error after the predefined settling times, so the control accuracy needs to be improved. Further, Refs.28,29,31–33 assumed that the spacecraft inertia information or its basis value is known, so they may not be applicable to the spacecrafts with uncertain inertia after capturing non-cooperative targets frequently. Therefore, a novel adaptive attitude controller without using the unknown inertia information should be investigated to eliminate the attitude error after the predefined settling time theoretically.
Considering the three difficulties, that is, the inertia uncertainty, the direct settling time adjustment, and the accurate attitude control simultaneously, we propose a new adaptive precise predefined-time attitude controller for a spacecraft in this study. It is required that the upper bound of settling time is an explicit control parameter, and that the attitude error after the predefined settling time is exact zero. A time mapping function is introduced to transform the time scale of the original attitude control system. The adaptive anti-unwinding backstepping attitude control algorithm is designed by using a composite barrier Lyapunov function. The system stability is proven by applying LaSalle-Yoshizawa theorem. Finally, numerical simulations are performed to validate the effectiveness and superiority of the presented method. The main contributions of the paper can be summarized as follows:
(1) The predefined settling time of the spacecraft attitude system is an explicit parameter in the control algorithm, so the users can know and set the desired upper bound of settling time directly with the proposed method, comparing it with traditional finite-time and fixed-time methods.19–22
(2) The proposed controller guarantees zero attitude error after the predefined settling time theoretically, thus improving the control accuracy, compared with traditional predefined-time attitude controllers.30–35
(3) Compared with traditional predefined-time attitude controllers,28,29,31–33 the proposed controller does not use the unknown inertia information or its basis value of the spacecraft. It can be applied to controlling the spacecrafts after capturing non-cooperative targets.
The rest of the paper is organized as follows: Section 2 presents some preliminaries and describes the control objectives of the paper. Section 3 specifies the detailed adaptive precise predefined-time attitude control algorithm. Section 4 verifies the proposed method with numerical simulations and Section 5 concludes the paper.
Preliminaries and control objectives
Preliminaries
The relationship between the inertial coordinate frame

where

where

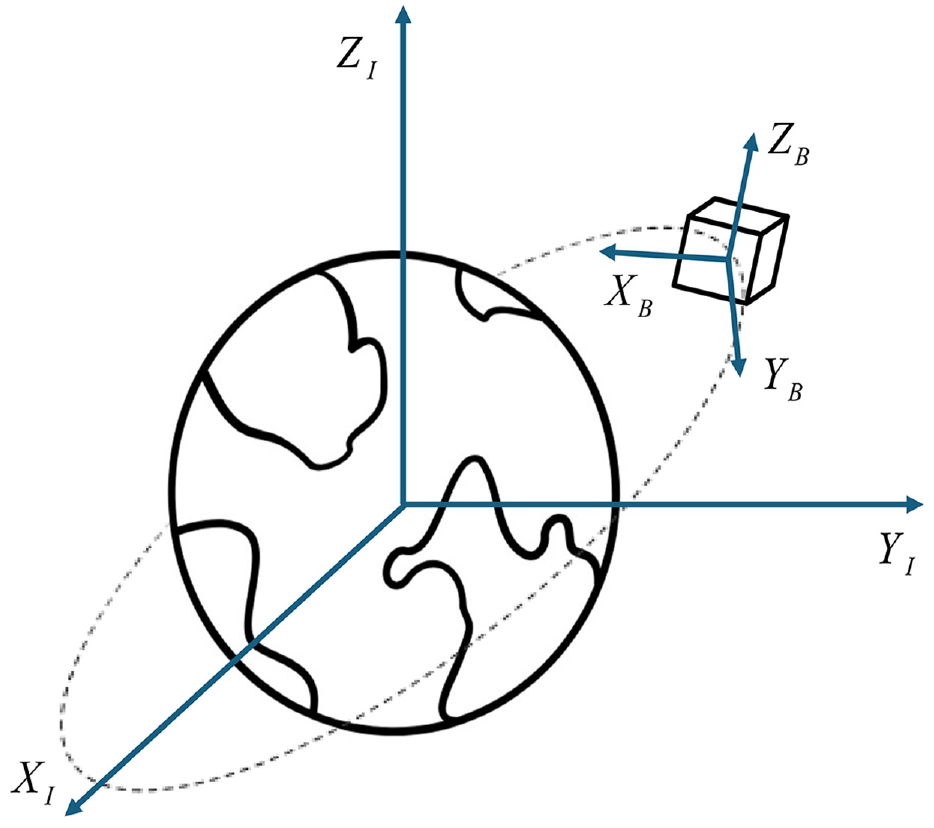
The relationship between the inertial coordinate frame and the spacecraft body coordinate frame.
Then, the following assumption and two lemmas are provided for the control design and the stability analysis of the spacecraft attitude system.

where

Control objective
The control objectives of this paper is to design an adaptive feedback controller
(i) System (1) is predefined-time stable within a predefined settling time

where
(ii) Attitude unwinding phenomenon can be avoided in the control process, that is,

(iii) The control algorithm does not utilize the unknown spacecraft inertia information
Control design
This section presents the adaptive predefined-time accurate anti-unwinding attitude controller and the system stability analysis for system (1). The structure of the control scheme is shown in Figure 2.
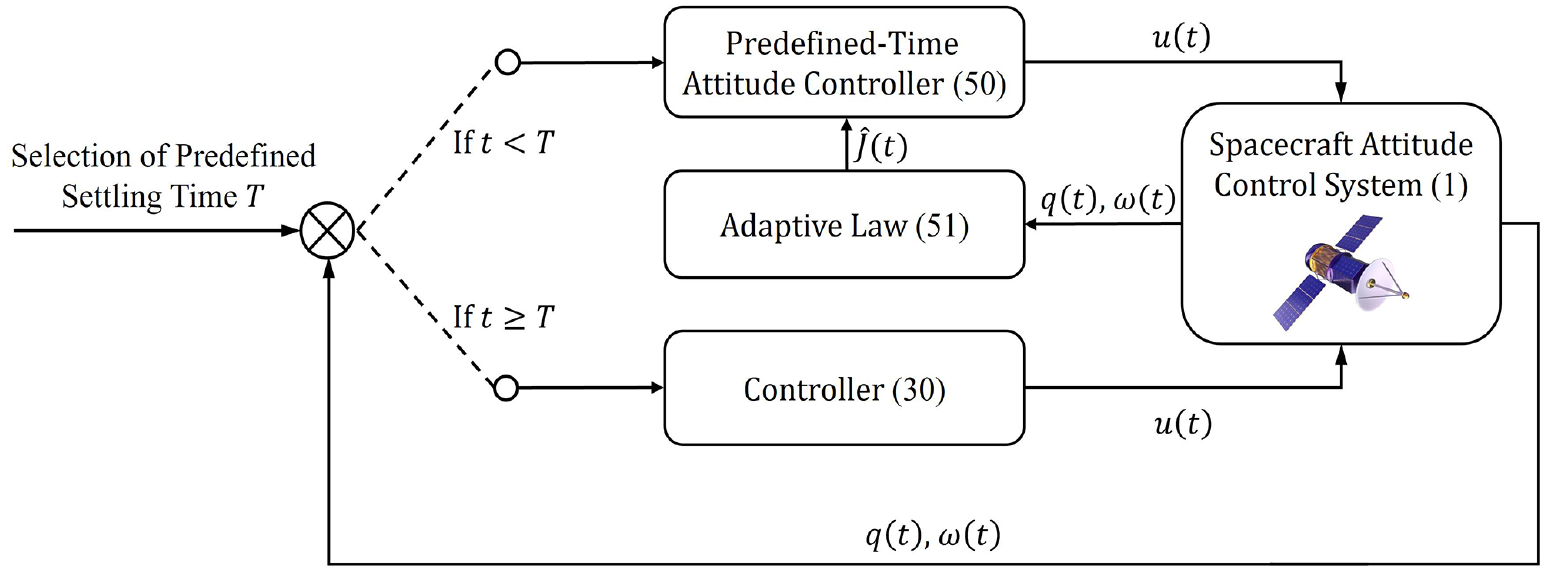
The structure of the proposed control scheme.
Model transformation
In order to stabilize the spacecraft attitude system (1) within the predefined settling time
The time mapping function is established as

The inverse mapping of the time mapping function (9) can be given by

The relationship between the original time scale

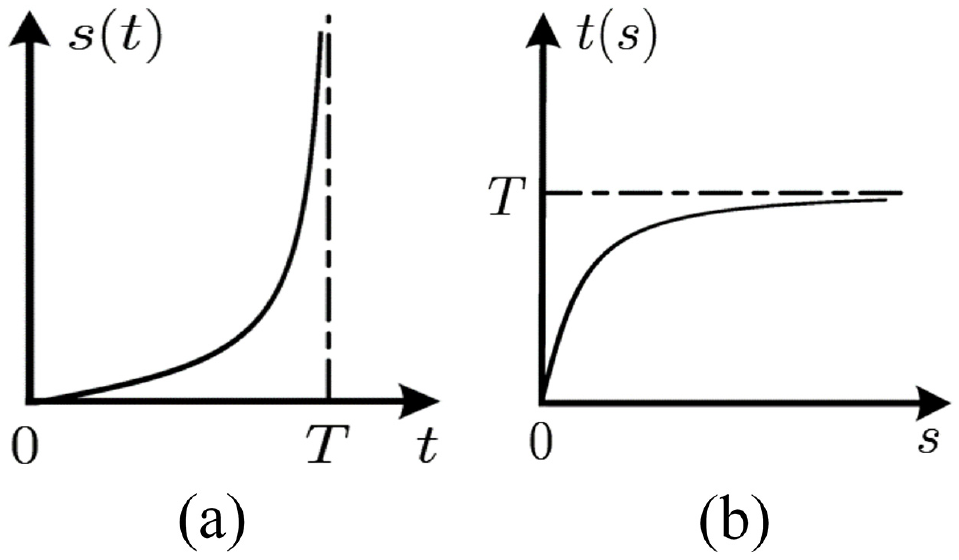
Curves of time mapping (9) and its inverse mapping (10): (a) curve of time mapping and (b) curve of inverse mapping.
Considering the transformed time
Then, for any vector

For the sake of the estimation of unknown inertia matrix

To proceed, the term

Thus, system (12) in
In this paper, the control law
Adaptive accurate predefined-time attitude control algorithm design
Adaptive backstepping control is applied to design the control law

where

where
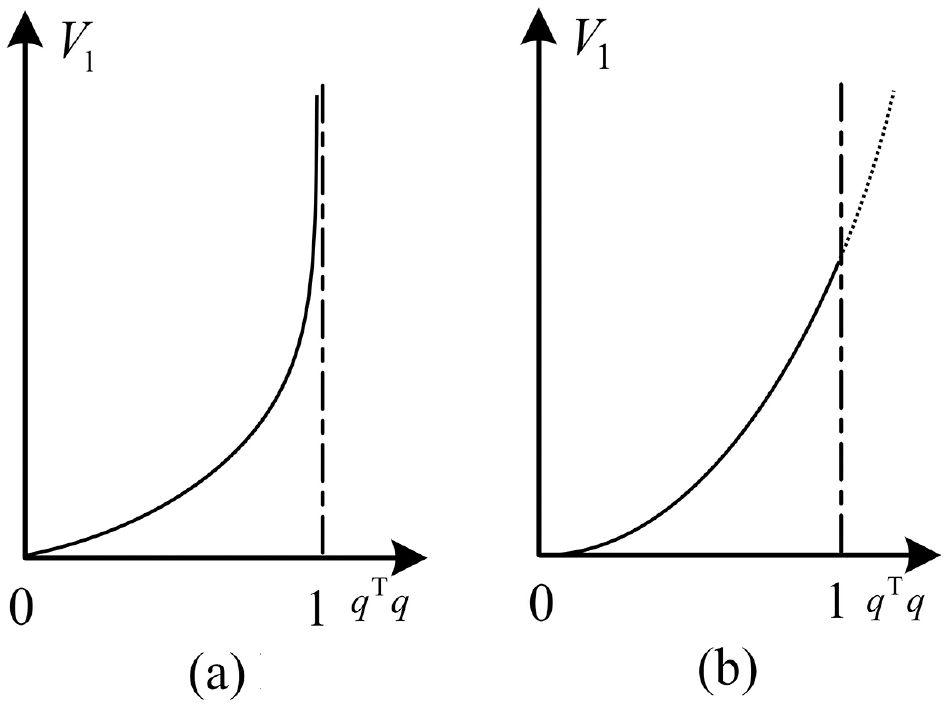
Curves of the composite barrier Lyapunov function (18): (a) in case q0 (0) ≠ 0 and (b) in case q0 (0) = 0.
Differentiating

where

The virtual control law

where
Substituting (21) into (19) leads to


where
The derivative of
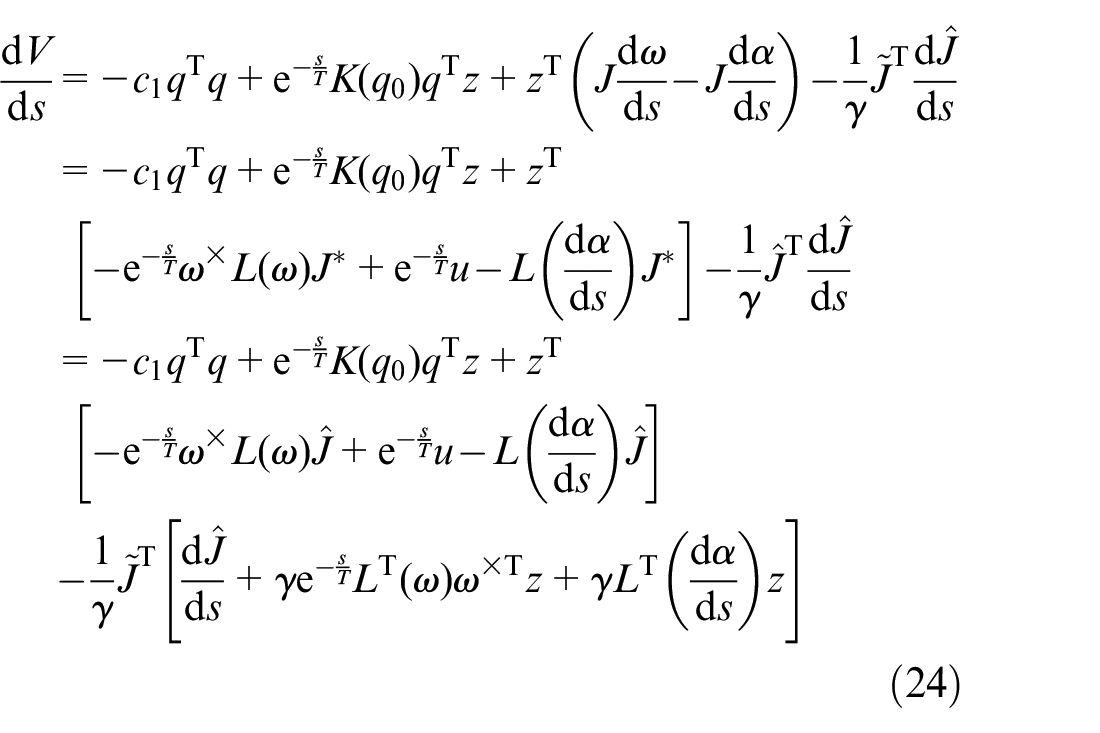
where

with
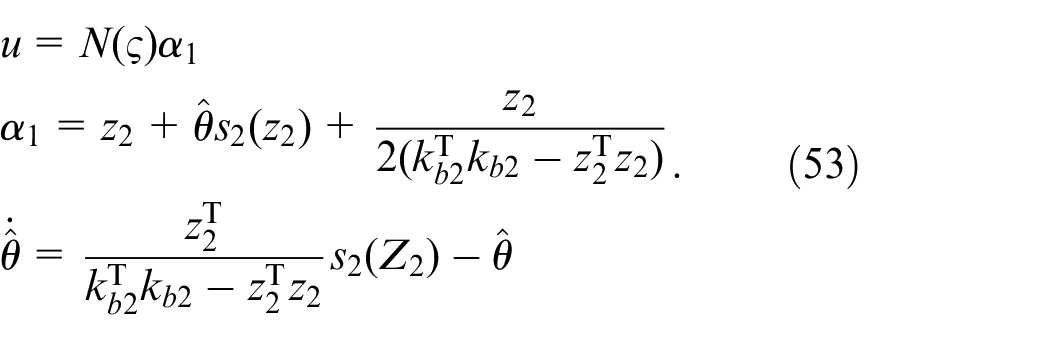
Design the control law
Substituting (27) and (28) into (24) yields

This ends the adaptive accurate predefined-time anti-unwinding backstepping attitude control law design in
In

System analysis
In this subsection, a theorem is introduced to analyze the predefined-time stable property and the anti-unwinding characteristic of the spacecraft attitude system (1).
Denote
Considering
Then by using (17) and (23), we know that
Considering two constant parameters
Then we define a scalar function

From equation (29), we know that

It can be obtained from (32) and Lemma1 that

Thus, according to equation (31), we have

Finally, from (11) and (34) we have that

Therefore, according to Lemma 2, it is known that the trajectories of
According to (34), (35) and the fact

Considering a case when the initial

This contradicts the boundedness of

Similarly, it can be obtained that

Therefore, the attitude control process has anti-unwinding property.
From (17), (21), and (34), we know that
Consider a case when
Thus, we have that

Choosing parameters

Considering another case when
Then we have that

Choosing parameters

Thus, combining the results in (43) and (47), we can see that if the parameters

Therefore, according to Lemma2, it can be seen that the trajectory of
Since

As a result, the states of the spacecraft attitude control system (1),
Finally, in order to facilitate the usage of the control algorithm, we modify (21), (27), and (28) with respect to the transformed time scale



where
Numerical simulation
Simulation of the proposed method with different predefined settling times
In this subsection, numerical simulations are performed to verify the effectiveness of the proposed method. In the simulation, the initial spacecraft attitude quaternion is set as
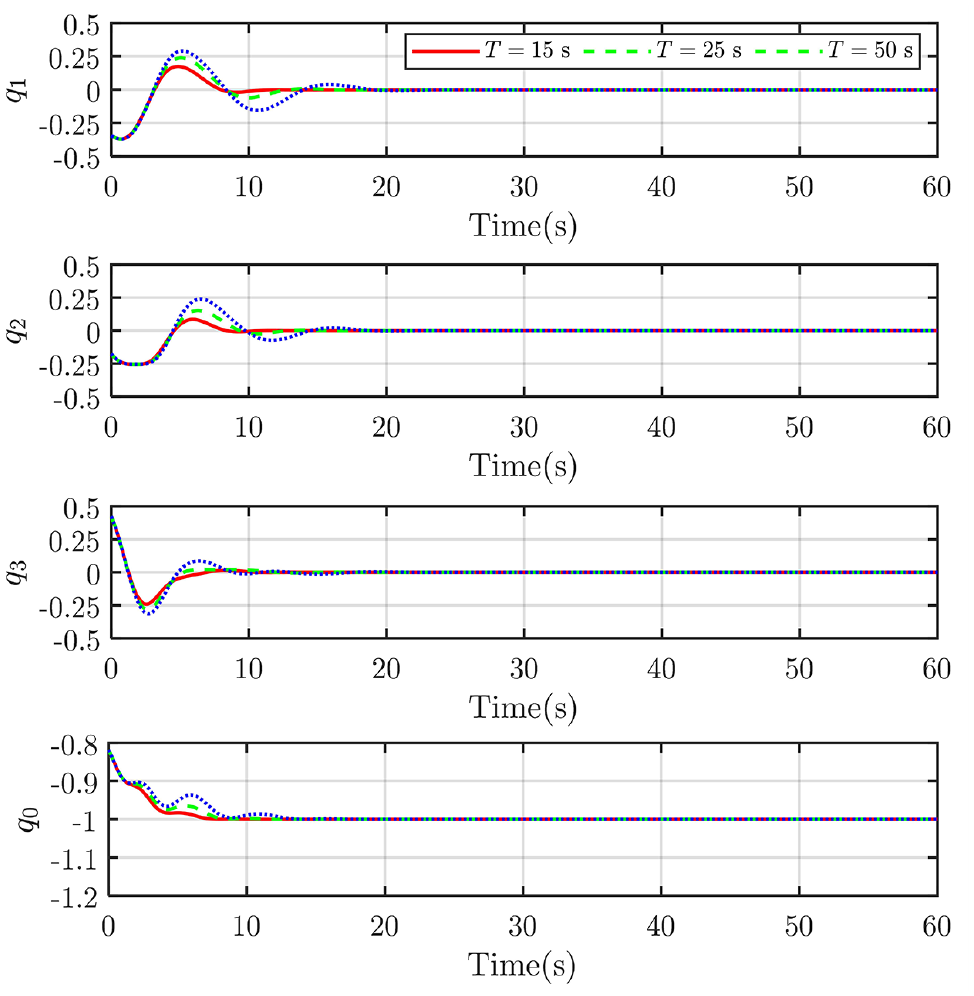
Trajectories of spacecraft attitude quaternion under the proposed controller.
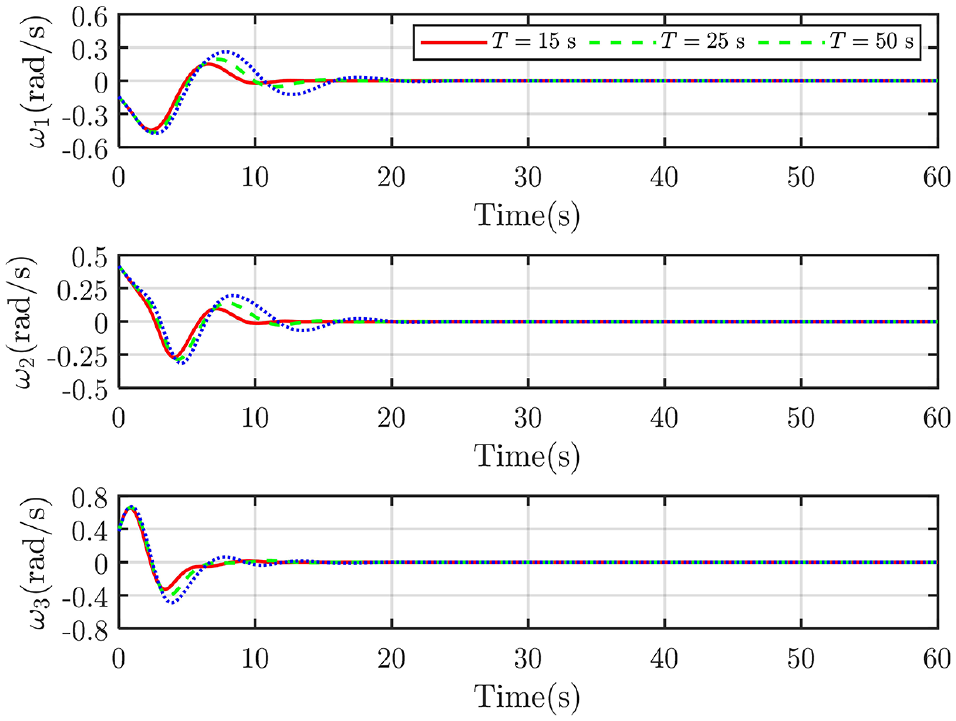
Trajectories of spacecraft angular velocities under the proposed controller.
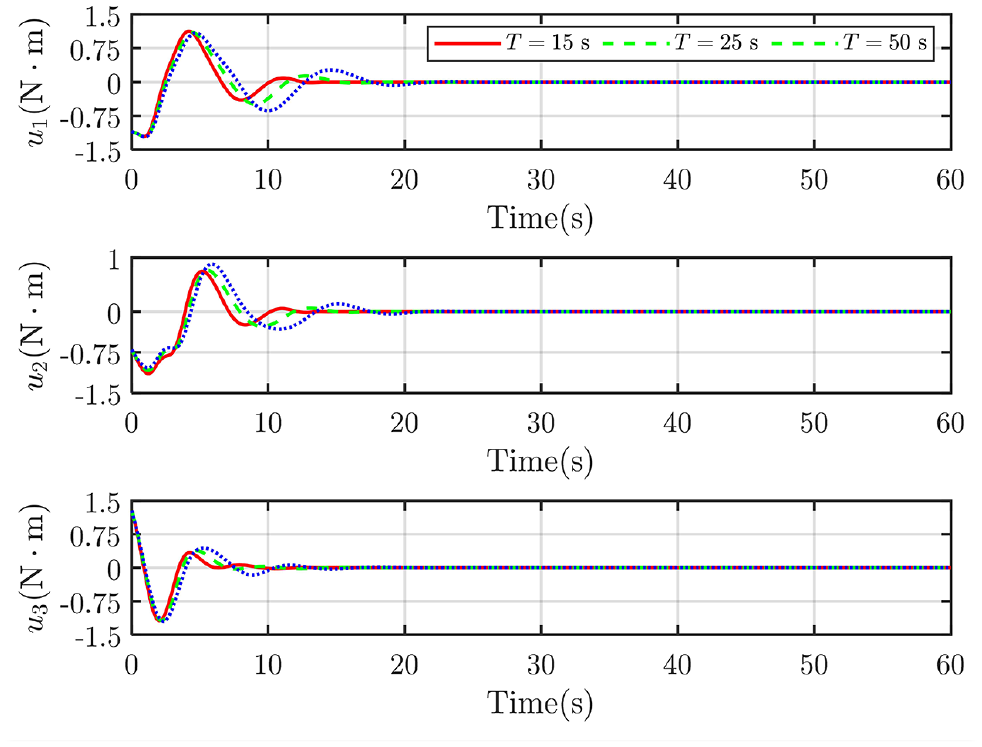
Trajectories of spacecraft control torques under the proposed controller.
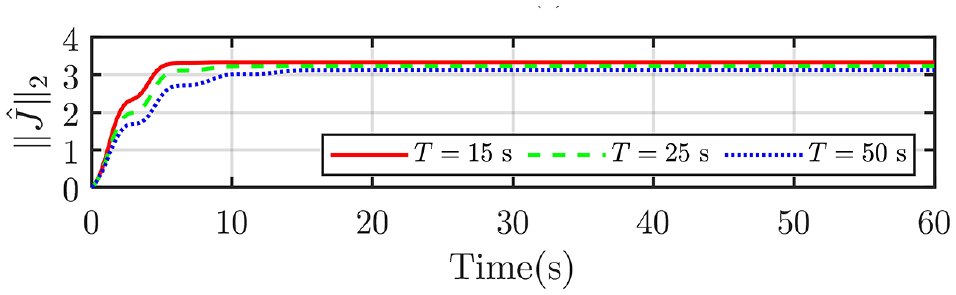
Trajectories of norm of spacecraft inertia estimation under the proposed controller.
It can be seen from Figures 5 and 6 that the trajectories of the spacecraft attitude quaternion
Simulation comparison
This subsection compares the proposed controller with some traditional controllers to verify the superiority of the proposed method. The comparative controllers are selected as the traditional finite-time controller (FTC) in Ref. 16 and the traditional predefined-time controller (PTC) in Ref. 28 Traditional FTC 16 assumed that the spacecraft inertia information is unknown, and estimates it with neural networks. Traditional PTC 28 assumed the uncertainty caused by the spacecraft inertia variation as external perturbations, and uses basis inertia information to design the control law.
In the simulation, the initial spacecraft attitude quaternion is chosen as
The traditional FTC 16 is given by:
where
The traditional PTC 28 is given by:
where
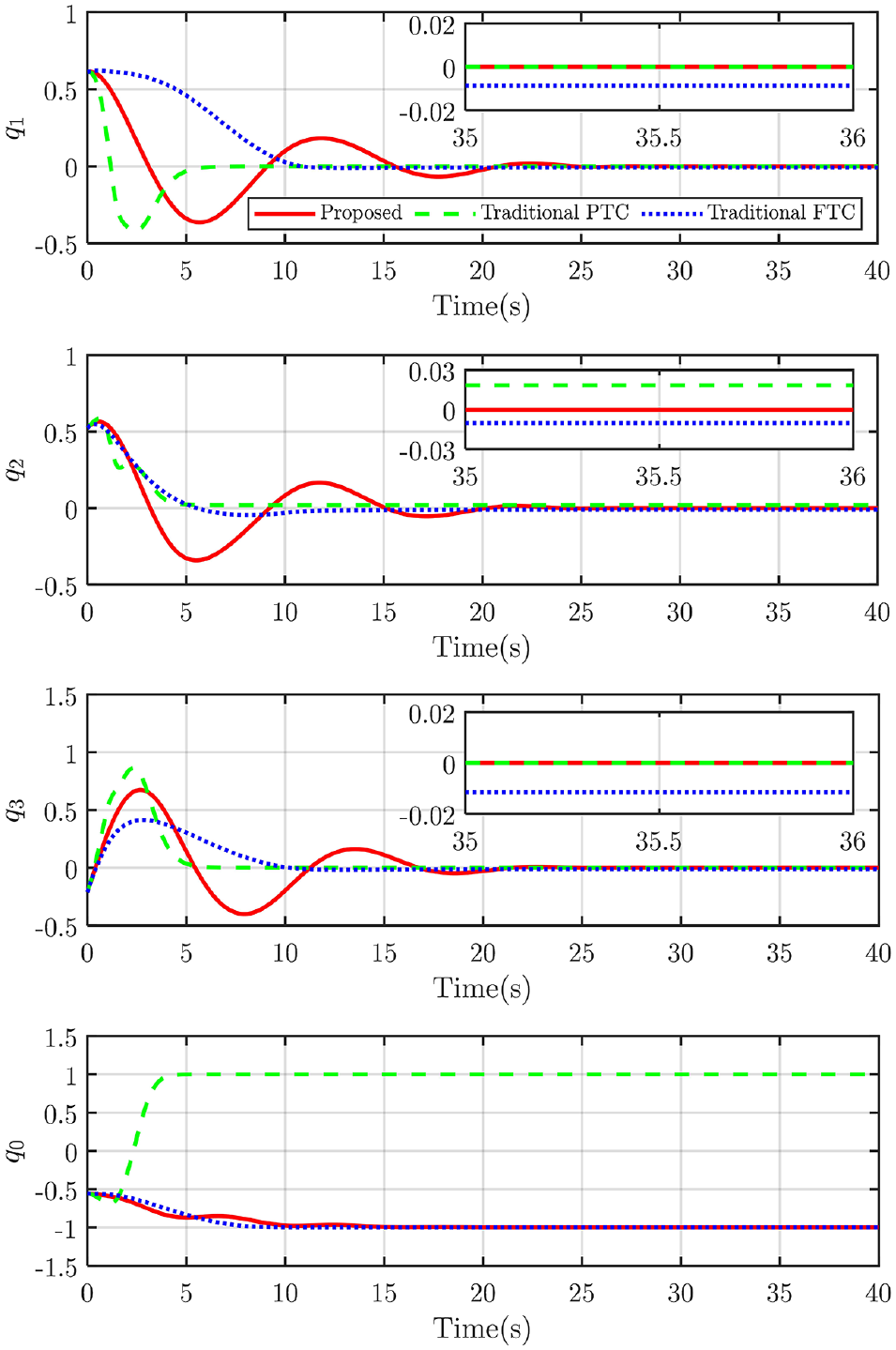
Trajectories of spacecraft attitude quaternion under three controllers.
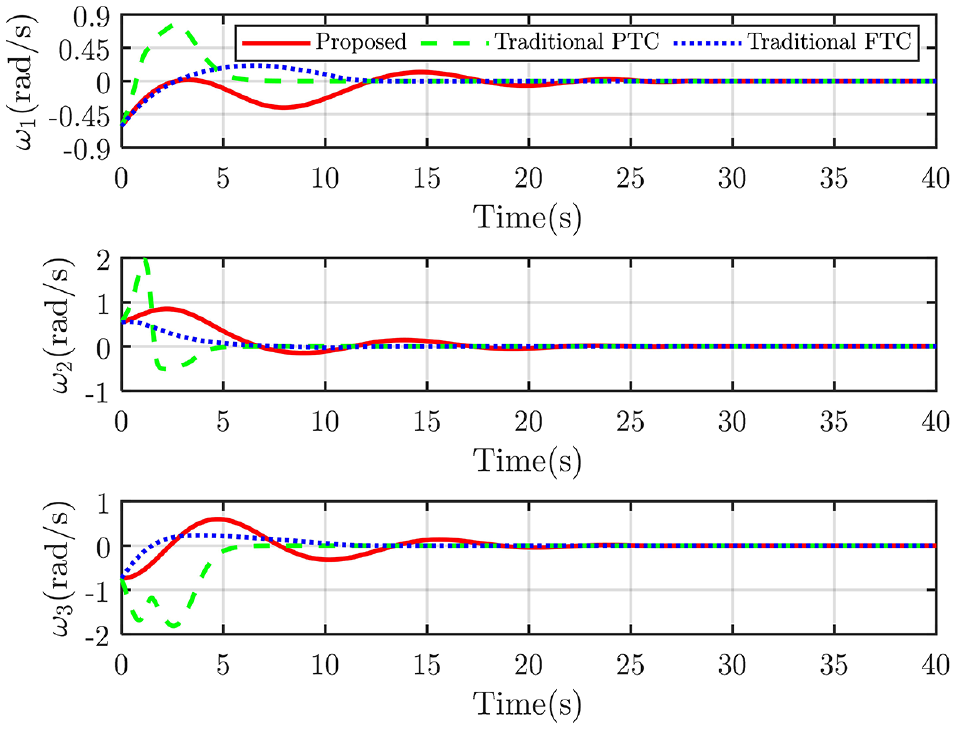
Trajectories of spacecraft angular velocity under three controllers.
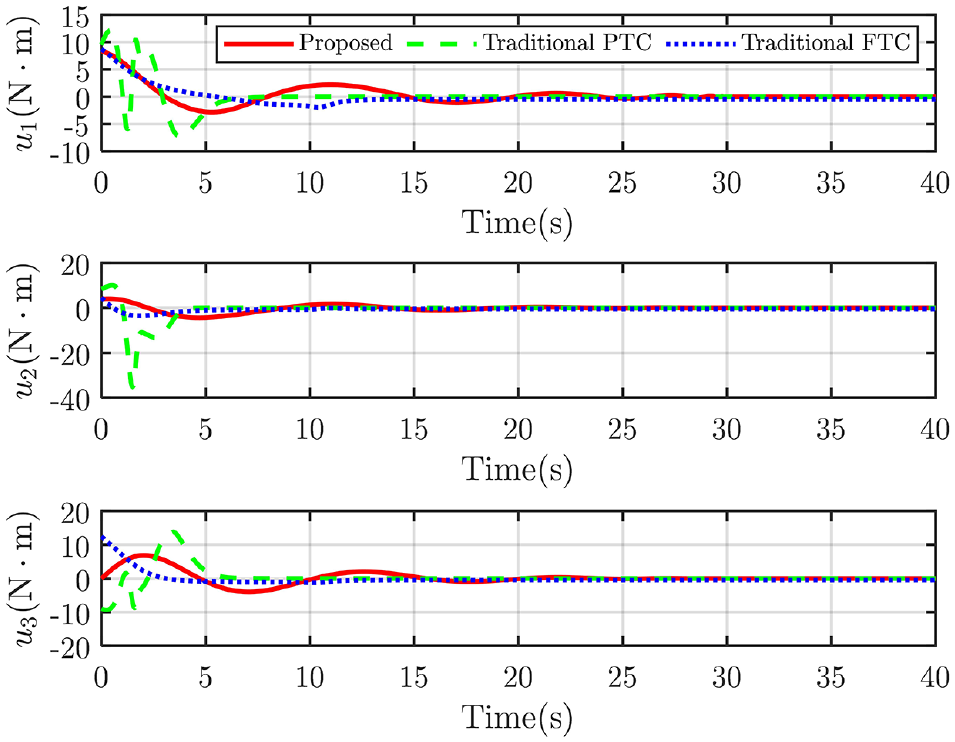
Trajectories of spacecraft control torque under three controllers.
It can be seen from Figures 9 and 10 that the trajectories of spacecraft attitude quaternion
Conclusion and future work
This paper proposes a new adaptive predefined-time precise anti-unwinding attitude controller for a spacecraft with inertia uncertainty. A time-mapping function containing the predefined settling time is introduced to transform the time scale of the original attitude control system. A composite barrier Lyapunov function is utilized to avoid the unwinding phenomenon in the attitude control process. It is proved that the settling time of attitude control system can be specified as an explicit parameter in the control algorithm, and the attitude error after the predefined settling time is exact zero. Simulation examples show that the presented controller accomplishes the accurate predefined-time attitude control of a spacecraft with unknown inertia. Comparative simulations with the traditional methods indicate that the proposed controller has the advantages of anti-unwinding attitude control and improved steady attitude accuracy.
In future work, adaptive predefined-time precise attitude formulation control for a multi-spacecraft system with inertia uncertainties can be studied.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: Natural Science Basic Research Plan of Shaanxi Province (2023-JC-QN-0683), China Postdoctoral Science Foundation (2023MD734219), Natural Science Project of the Department of Education of Shaanxi Province (23JK0558), Shaanxi Innovative Team for Science and Technology (2023-CX-TD-01), Young Talent Fund of Association for Science and Technology in Xi’an, China (959202413026), Postdoctoral Research Project of Shaanxi Province, China (No. 2023BSHEDZZ258).