
Abstract
Actuator fault might occur during quadrotor helicopter’s flight. It is a demand to detect actuator fault in real-time. An actuator fault detection method based on extreme learning machine is proposed. An extreme learning machine network is used to approximate the dynamic of the actuator, which is trained by the actuator’s inputs, outputs, and states. The dynamic of the actuator is mapped to the output matrix of the proposed extreme learning machine network. By monitoring the norm of the output matrix, the dynamic of the actuator is supervised, and system fault can be detected. The proposed extreme learning machine network is tested on a self-made experimental propeller system platform, and results show that the method is sensitive and effective on both major and minor fault circumstances.
Introduction
Quadrotor helicopter is becoming more popular in recent years. It has simple mechanical structures and intuitive principles, and is convenient in use. With capability of hovering and vertical take-off and landing, 1 quadrotor helicopter receives considerable success in areas of agricultural plant protection, aerial photography, logistics, surveillance, and monitoring.
Along with the productization and commercialization of quadrotor helicopters, the importance of system reliability is increasingly prominent. Electronic quadrotor helicopter is usually driven by a propeller system based on brushless direct current (BLDC) motors. Reliability of a quadrotor system largely depends on the propeller system, for it is the only actuator of the whole helicopter. The actuator is usually working under rigorous conditions such as vibration, dusts, temperature, salt mist, which significantly increase the probability of actuator fault. Real-time actuator fault detection is required. With the help of on-line actuator fault detection, the quadrotor helicopter may be survived by fault-tolerant control under actuator fault circumstance.
Researchers and engineers have made great achievements on actuators and sensors fault diagnosis of Unmanned Aerial Vehicles (UAVs). A two-stage Kalman filter is used by Moghadam and Caliskan
2
to diagnose sensor and actuator fault. A
Since the actuator under detection suffers from disturbances and uncertainties in real system, and precise model is difficult to acquire. In order to reduce the dependence on precise model, an extreme learning machine (ELM)–based actuator fault detection method is proposed in this article. ELM is a computational intelligence method composed of single-hidden layer feedforward networks (SLFNs) and the tuning algorithm.7,8 The input weights and hidden layers of an ELM network are randomly generated during initialization and not to be tuned afterward. Only the output weights of the ELM network are to be trained. Compared with engineering applicable support vector machines (SVM) and radial basis function (RBF) networks,9,10 ELM provides much faster learning speed with less human intervention;11,12 therefore ELM is particularly suitable for on-line and real-time applications, and ELM has been successfully applied to several systems for real-time fault diagnosis.13–20
The central idea of the proposed method is mapping the actuator’s dynamic to an ELM network’s output weights. First, an ELM network is designed to characterize the dynamic of the actuating system by selecting proper inputs and outputs of the network. Then the network is trained periodically on-line using the actuator’s real data; thus, the actuator’s dynamic will be mapped to the network’s output weights. Finally, an actuator fault is decided by monitoring the norm of the network’s output weight matrix. The proposed approach is evaluated on a mainstream actuating system with a self-made electronic speed controller (ESC) platform.
The contributions of this article are as follows: (1) an ELM-based actuator fault detection method for quadrotor helicopter is proposed. (2) The proposed method is validated by experiments on a mainstream actuating system of a quadrotor helicopter. The beneficial effects are as follows: (1) the experimental results show that the proposed method is sensitive and effective under both major and minor fault circumstances. (2) The proposed method does not require precise prior knowledge of the system. (3) The proposed method is computational acceptable to very small-scale microprocessors and can be implemented on mainstream actuating systems of quadrotor helicopters.
This article is organized as follows: in section “Actuating system of quadrotors,” the actuating system is introduced. In section “ELM model representation,” the idea and method to represent actuator dynamic by an ELM network are illustrated. Fault detection scheme is proposed in section “Fault detection.” Implementation setups and experimental test results are provided in section “Implementation and experiments.”
Actuating system of quadrotors
The propeller system is the actuator of a quadrotor helicopter. A typical propeller system can be expressed in Figure 1, which includes a Brushless DC motor (BLDC), an ESC, and a propeller. The effect of throttle input T on the BLDC’s rotational speed Ω is a dynamical progress. The responses are different among different quadrotors depending on the characteristics of BLDCs and propellers, but the forms and structures are consistent.

Typical structure of a quadrotor’s actuating system.
Traditional brushed DC motors are easily driven and are used in micro-quadrotors. The BLDCs are superior in efficiency and widely used in most quadrotors. Most quadrotor’s BLDCs are sensor-less, and the rotor position is estimated by monitoring the back electromotive force (BEMF) of the motor coils. In this article, the discussion is focused on the sensor-less BLDC motor–based actuator. An ESC at least includes (1) a microprocessor, (2) several metal-oxide semiconductor field effect transistors (MOSFETs), and (3) BEMF detection circuits. The microprocessor block deals with tasks relate to interfacing, logic and timing, control, MOSFETs driving and signal processing. MOSFETs are high-current switches driving the BLDC motor. BEMF is measured to decide commutation timing.
The essence of an ESC is a power-controlled electric commutator. By changing the duty cycle of pulse-width modulation (PWM) signals applied on MOSFETs, the currents in the coils of BLDC motor can be adjusted, thus rotational speed can be controlled. For the sake of brevity, donate the duty cycle of PWM signals applied on MOSFETs as TM. For example, for minimal throttle signal T, the pulse-width of TM is zero; thus, no power is transmitted to BLDC, and BLDC is free sliding to stop. For maximum T, the pulse-width of TM is 100%; thus, full power is transmitted to BLDC. As shown in Figure 2, the input signal of the propeller system is throttle T, which is further one to one mapped by the microprocessor block to MOSFETs’ driven signal TM. The output signal is rotational speed Ω of the BLDC. The dynamic of the propeller system implies in the relation between TM and Ω.

Signal relations.
ELM model representation
Actuator model
The quadrotor helicopter’s actuator is a DC motor, whose dynamic can be represented by a first-order system 21 as equation (1)

where a and b are model parameters.
Identification experiment is first conducted to evaluate the accuracy of model in the form of equation (1). As shown in Figure 4, excitation signal which covers the working range of the actuator is applied on the MOSFETs’ driven signal TM during the identification experiment. A generalized binary noise (GBN) is further added to the excitation signal to guarantee persistency of excitation. The detailed excitation signal is shown in Figure 3. Other system parameters are as follows: (1) 12.0 V input voltage, (2)
Detailed GBN carried excite signal on TM.
The input and output data during the identification experiments are shown in Figure 4. The model input is the duty cycle of PWM signals TM, which is normalized to [0, 1]. The model output is the motor’s rotational speed Ω. In this article, rotational speed is represented by the commutation frequency, which can be measured directly by timing BEMF in the ESC and is linearly related to the physical rotational speed. The measured commutating frequency is biased before model identification. In this particular case, the commutating frequency is biased by 530 Hz. The identified model will decrease in accuracy without the bias, and the bias is speculated representing the nonlinearity in the motor’s low-speed operation area.

Input and output data.
The identified model is expressed in equation (2) and the model is practical with an accuracy of 94.8%; the model matching is shown in Figure 5

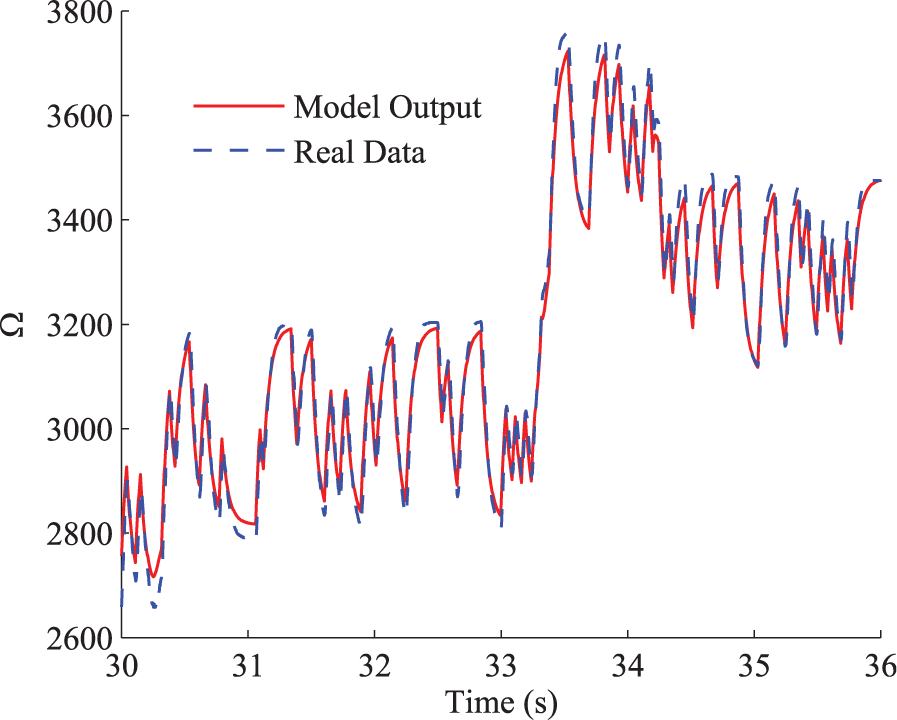
Model match (detailed).
Compensating the pre-bias of 530 Hz, the model between TM and Ω becomes

Dynamic represented by ELM
Note that there is no memory element in ELM network, so an ELM network cannot represent dynamical progress directly. The dilemma is settled by appropriately selecting inputs and outputs of the network. From equation (3), we know that the actuator’s dynamic
The network can be modeled as

where
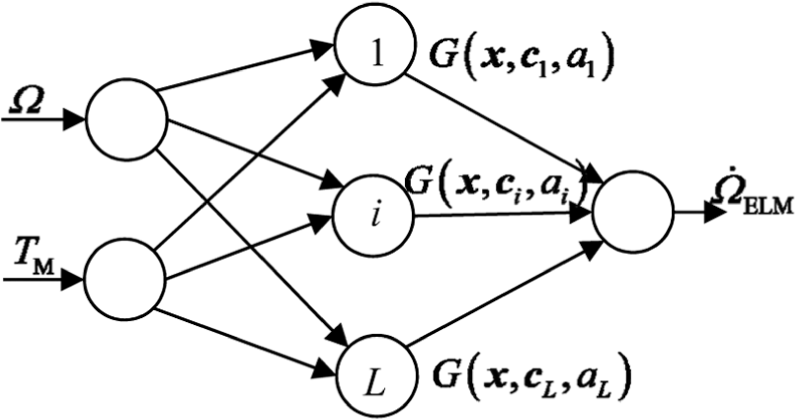
Dual-inputs single-output ELM network.
The ELM network is trained by the following classical steps: 23
Step 1. Randomly generate L hidden nodes with parameters
Step 2. Prepare training data with length N. First, training sequence is recorded

Synchronously, calculate the hidden layer output matrix

where N is the length of training sequence. The ith row of matrix
Step 3. Calculate the output weights matrix

ELM network is trained by solving

where
The ELM system structure is summarized in Figure 7. Note the results provided in section “Actuator model,” the quadrotor’s actuator model can be well represented by linear element, so linear activation functions are chosen in this case


System structure.
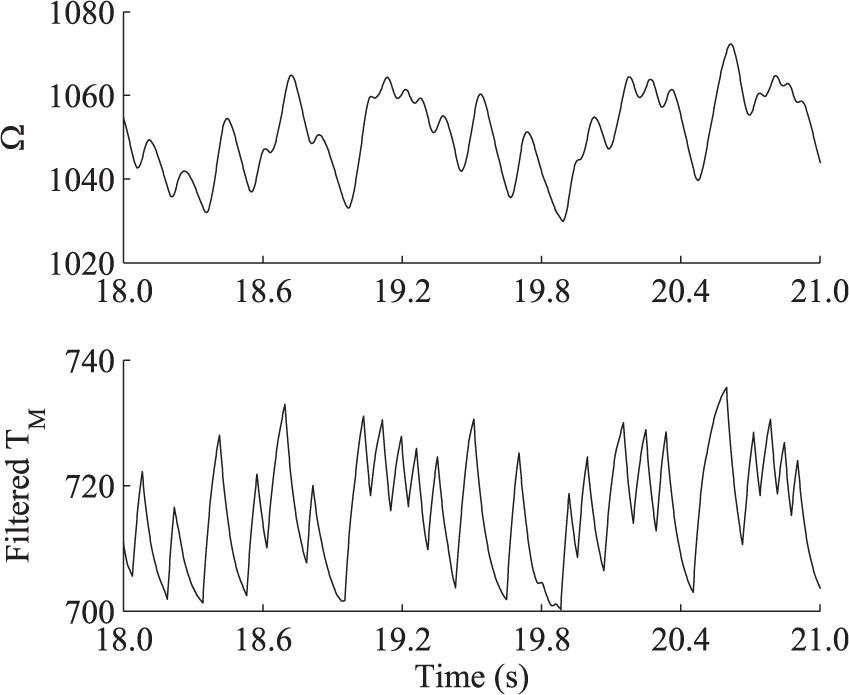
A filter shown in Figure 8 is applied to reduce high-frequency noise of sampled actual commutating frequency

Rotational speed signal process.
The first-order smooth block can be expressed as

where
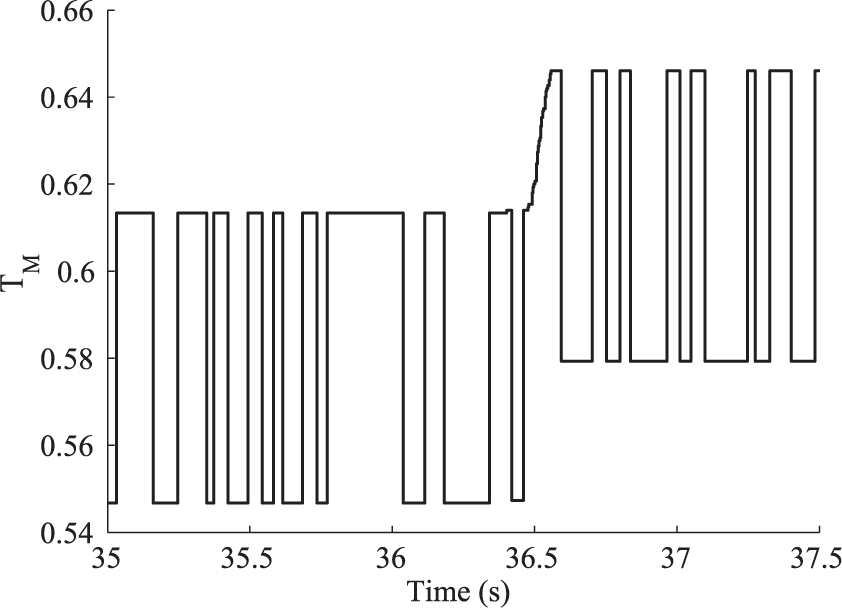
The training data are acquired by the self-made ESC at a sampling rate of 333 Hz. In order to simulate the actual working condition while maintaining the persistency of excitation, a GBN signal whose amplitude is about 1% of the full scale of signal TM is applied to the TM signal during data acquisition. In the simulation, a network with hidden nodes number L = 200 and training data length N = 333 is chosen at first. After network training, the detailed network input signals are shown in Figure 9. The network output signal
Input signals of the ELM network (detailed).
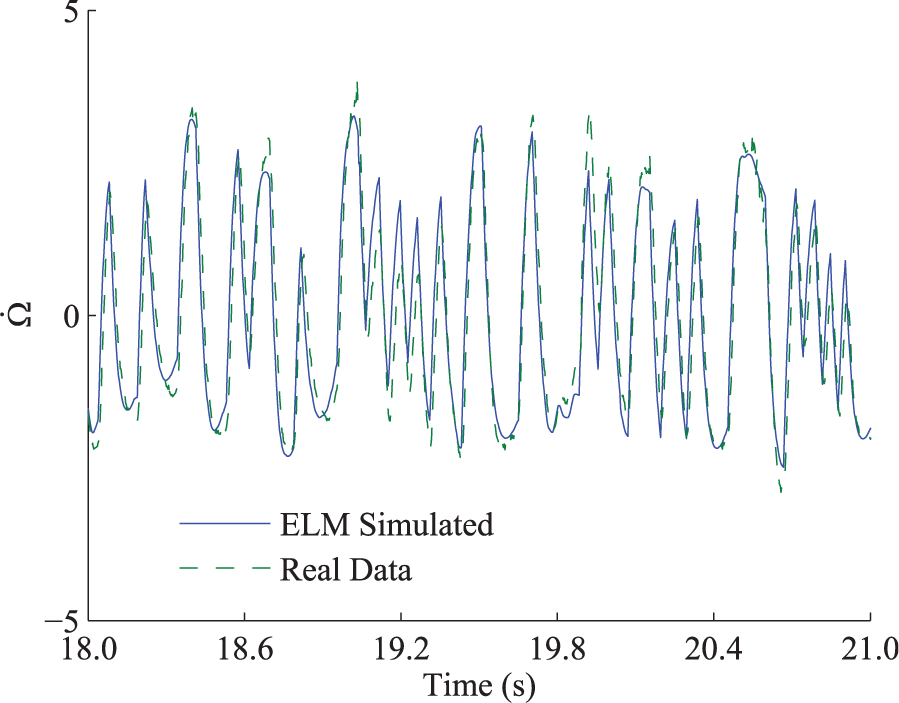
ELM model matching (detailed).
Remark 1
One potential issue of the proposed method is that the convergence of

Detailed throttle signal and spectrum during an actual flight.
Fault detection
During the operation of a quadrotor helicopter, actuator faults usually occur in several cases: (1) propeller breakage, (2) propeller flying off, (3) increased motor resistance by damage or invasion, (4) motor jamming by damage or invasion, and (5) partial short circuit in motor’s coils. Although the causes of actuator fault are various, they all have influence on the dynamic of the actuating system.
As discussed in section “ELM model representation,” the proposed ELM network can represent the dynamic of the actuating system. By training the ELM network, the dynamic of the actuator is mapped to the output matrix
To simulate an actuator fault, extra resistance is applied while the motor is spinning. The waveforms are shown in Figure 12. Extra resistance force is generated and applied to the motor at approx. 30 s. The damping of the actuator increases instantly. The changed dynamic is sensitively reflected in the norms of network’s output weight matrix



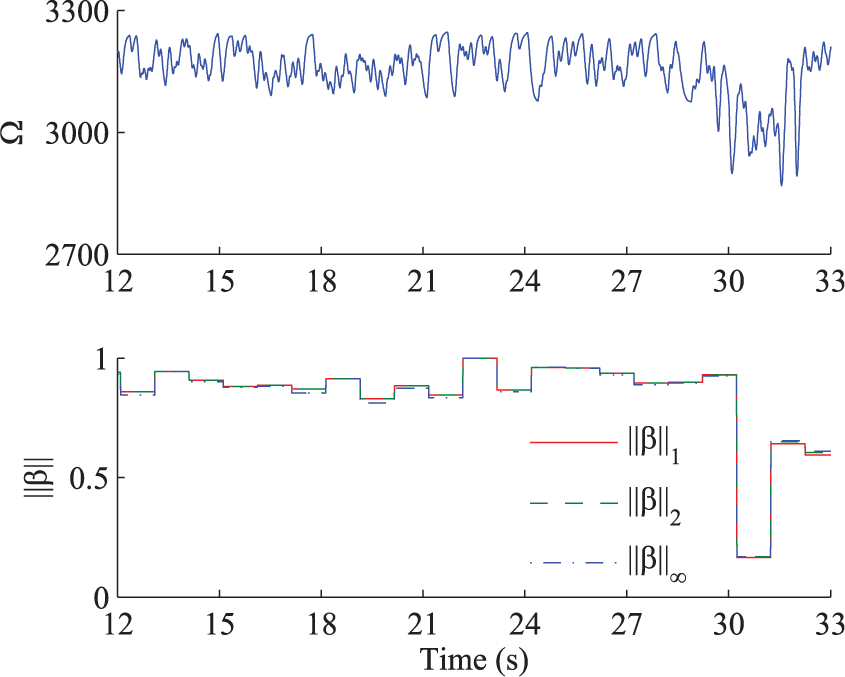
Propeller failure experiments (detailed).
As can be seen from Figure 12, all of the norms are equal in sensitivity; thus, by selecting
The long-period dynamic is drifting during operation because of multiple reasons such as power supply (battery) voltage dropping, temperature changing, and working point drifting. An adaptive fault judgment scheme is designed for both sensitively and reliably detection. As shown in Figure 13, calculated

where K indicates the current update step.

Fault judgment scheme.
The standard deviation

where
A fault is judged from the previous experiment data by the proposed scheme. During the simulation, window length
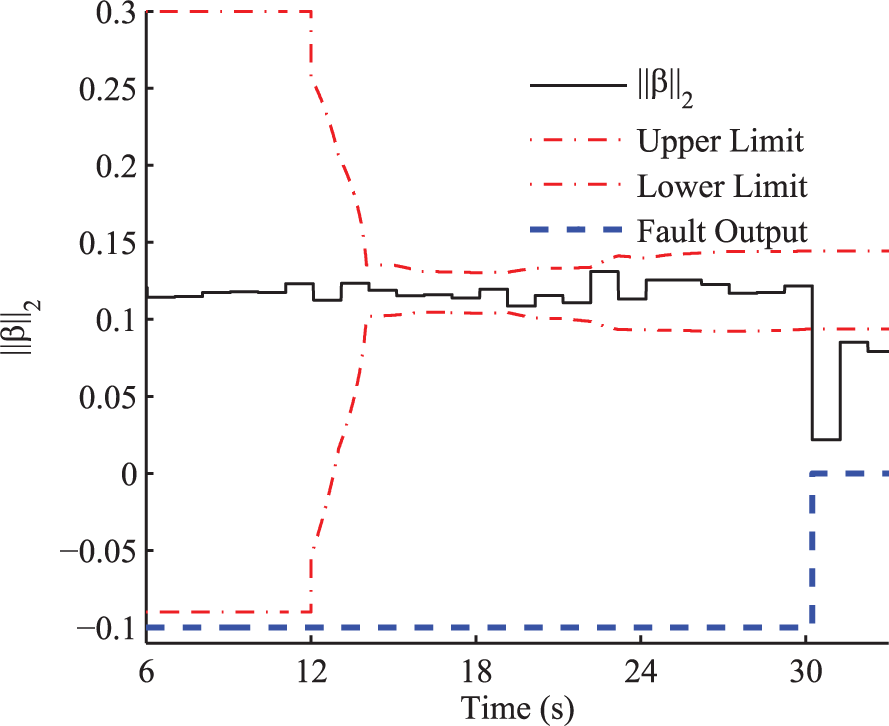
Fault judgment result.
Implementation and experiments
The scale of the proposed ELM network is the major obstacle during its implementation. In this section, the network scale is optimized and the proposed ELM–based actuator fault detection method is implemented and tested.
Mainstream market available components are selected to guarantee the universality of experiment. Components used in experiment are listed in Table 1.
Components participate in experiment.

A special self-made ESC is developed and implemented by the authors as shown in Figure 15. The self-made ESC’s major circuit structure, MOSFETs’ topology, and MOSFETs’ driven circuits are the same as mainstream commercial ESCs. A STM32F1 microprocessor which runs at 72 MHz and an external USB interface IC are installed. With the USB interface IC, the motor’s rotational speed, input throttle signal, current, and voltage can be sampled and transferred to PC in real-time. Limited by hardware capability, the sampling rate is set to 333 Hz, which is considered high enough to cover the bandwidth of a BLDC. The other parameters of the self-made ESC are as follows: (1) rated current at 80 A, (2) input voltage ranging from 10 to 65 V, and (3) MOSFETs’ switching frequency from 8 to 48 kHz settable.
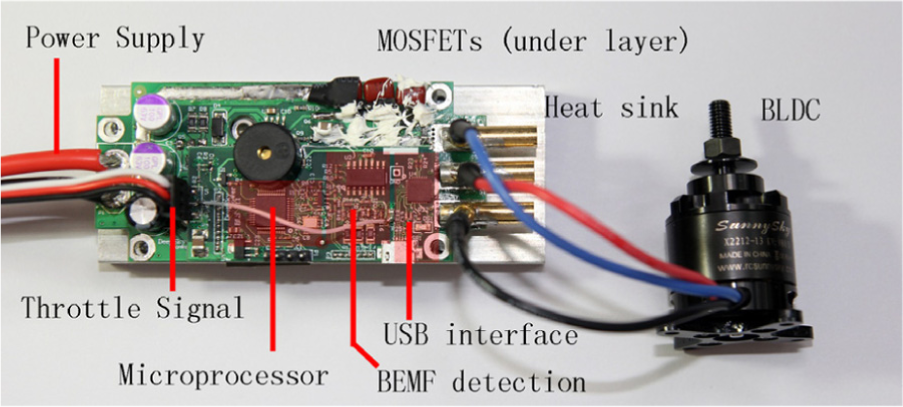
Self-made ESC.
Within the self-made ESC, the range of signal TM is 0–1500, and the commutating frequency Ω is ranging from 0 to 6000. To make two inputs range similar, the value of Ω is divided by 3.
Network-scale optimization
The fault detection algorithm is only meaningful while running in real-time. Considering the limited computational abilities of the microprocessor, several efforts are done to reduce the computational and memory requirements. The real-time performance of the algorithm is first enhanced by reducing updating rate of the network to 33.3 Hz. The primary thought of reducing the ELM network’s update rate is to shorten the length of training sequence. The training sequences must contain enough information of the actuating system; thus, each sequence must last for a certain period of time. Reducing the rate will shorten the training sequence, which will largely reduce the computational costs. However, the rate shall be high enough to cover the bandwidth of the actuator. From equation (3), the bandwidth can be inferred as 3.13 Hz, selecting sampling frequency 10 times over the bandwidth will not violate the sampling theorem. Subsequently, two other efforts are made to further reduce computational consumptions: (1) reducing the number of hidden nodes L and (2) reducing the length of training sequence N. To achieve the balance between computational costs and fault detection performance, L and N numbers need to be evaluated.
The degree of training accuracy

Using data mentioned in section “Dynamic represented by ELM,” by changing numbers of hidden nodes, the relation between accuracy
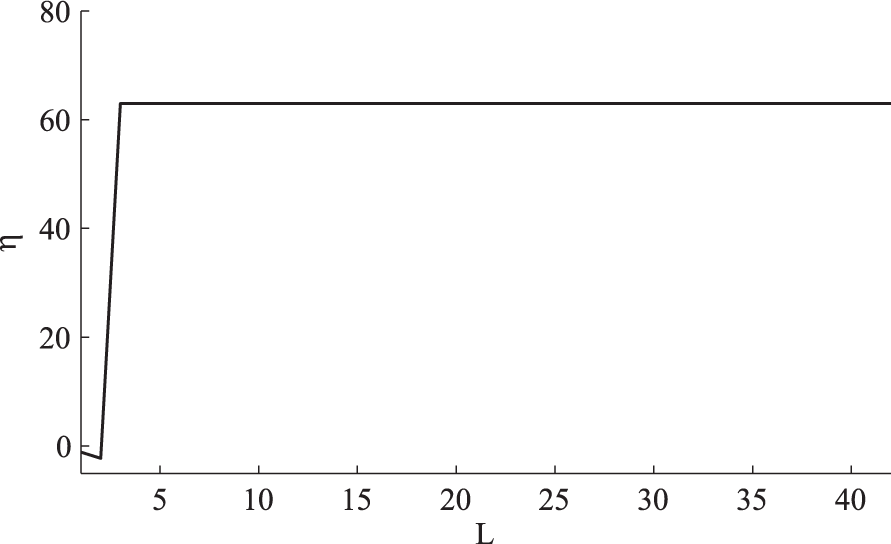
Accuracy versus hidden nodes numbers.
The accuracy

The
Fixing L to 3 and tuning training sequence length N, the relation between accuracy

Accuracy versus training data length.
The scale of the ELM network is then optimized. Matrix
Experiments and results
The test bench is shown in Figure 18, an optimized ELM network is implemented on the self-made ESC platform to verify the practicability of the proposed method. During the experiment, a GBN signal whose amplitude is about 1.5% of the full scale is added to the TM signal to simulate the actual working condition as well as to maintain the persistency of excitation. The first-order smooth filters mentioned in equation (10) are running at rate of 333 Hz. The ELM network update rate is set to 33.3 Hz with training period of approx. 1 s as discussed in section “Network-scale optimization.” The window length

Test bench.
The first tested actuator fault situation is the propeller flying off. The propeller is installed to the BLDC with screws not tightened, so the propeller would fly off while BLDC is running.
The result is shown in Figure 19. The propeller flies off at 70.83 s, the BLDC comes to no-load immediately, the rotational speed rises to approx. 6000 Hz from normal working point of approx. 3000 Hz.
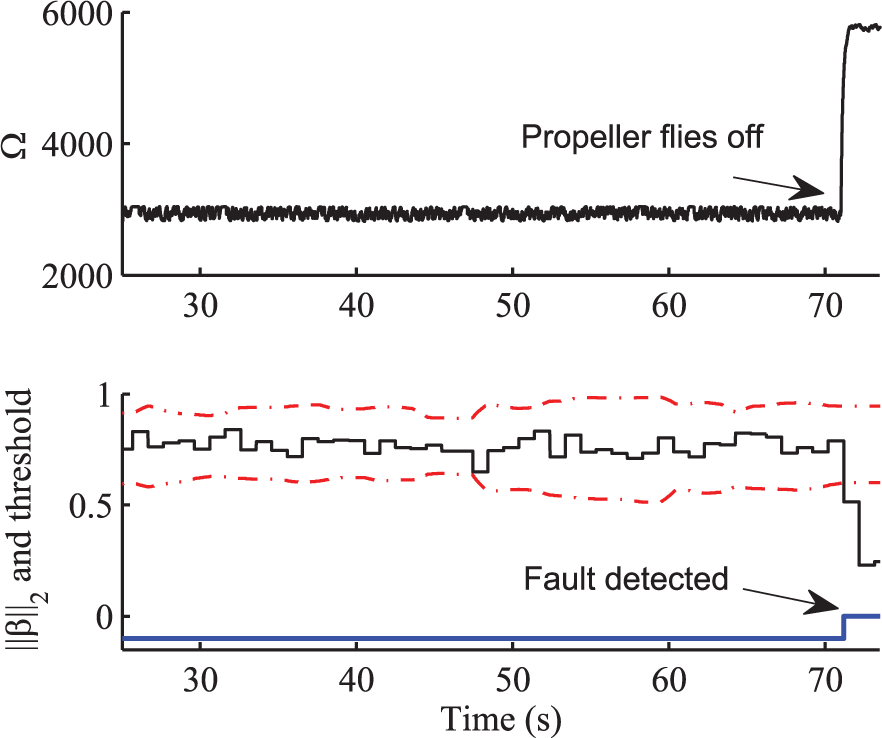
Propeller flying off test.
Increased motor damping caused by damage or invasion is another typical situation of actuator fault, which will result in overly vibration and wearout. This situation is simulated by inserting an obstacle from the back of the propeller plane. The inserted obstacle will receive great ejecting force when it hits the spinning propeller. The propeller will suffer from extra resistance but will not stop at once. Actual experiment result is shown in Figure 20. An obstacle is inserted at 42.3 s and removed at 43.5 s; a speed loss of about 100 Hz (3.3%) can be observed.

Propeller jamming test.
Conclusion
A novel ELM–based actuator fault detection method of a quadrotor helicopter is proposed. By appropriately selecting network’s inputs and outputs, the dynamic of the quadrotor’s actuator can be tracked by the ELM network precisely. In order to enhance the real-time performance, methods to optimize the computational costs are introduced. The fault detecting accuracy can be achieved using an ELM network with 3 hidden nodes, with a training sequence length 33 and a updating rate 33.3Hz. Finally, the proposed method is implemented and tested on a mainstream actuating system with a self-made ESC platform; the results show that the ELM-based actuator fault detection method is computational acceptable to very small-scale microprocessors and has good sensitivity and effectiveness on both major and minor fault circumstances.
For future work, ELM-based fault diagnoses and applications of other ELM versions such as Online sequential ELM (OS-ELM) will be investigated; the practicability and performance of quadrotor helicopter systems are expected to be further enhanced.
Footnotes
Academic Editor: Chenguang Yang
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by the National Natural Science Foundation of China (grant no. 61673341) and Fundamental Research Funds for the Central Universities (2016QNA5010).