
Abstract
A discrete reconfigurable back-stepping controller is proposed to resolve the attitude command tracking problem of hypersonic flight vehicle in reentry mode. The hypersonic flight vehicle dynamic equations are transformed into discrete form based on Euler numerical integration method. Discrete control command is designed via discrete back-stepping. Control allocation strategy is introduced to deal with the resource distributing problem of reaction control system and aero-surfaces. In computer simulation environment, the vehicle tracks command signals precisely and quickly.
Introduction
Hypersonic flight vehicle (HFV), as an efficient and low-cost tool to access space, is drawing more and more attention (Figure 1). Flight envelope of HFV covers wide range of height and velocity. Conditions of hypersonic flight are difficult to measure or estimate.1–3 HFV is susceptive to modeling uncertainties and measuring inaccuracies. HFV dynamics is unstable, and it is a non-minimum phase.4–6 As a result, robust nonlinear control has become one of the significant strategies for HFV control system.1,7–12 A robust neural adaptive controller based on inverse dynamics is presented by Xu et al. 8 Simulation studies of a generic hypersonic aircraft shows good performance.4,13 Validity of sliding mode control design is demonstrated in the works by Zhao et al., 7 Shtessel et al., 11 and Yang et al. 14 A sliding mode observer is added to the robust optimal control loop to attenuate the external disturbances. 15 Progress in artificial neural network reveals bright future in nonlinear control problems, especially in the presence of severe model uncertainties.16–20 Using a nonlinear disturbance observer and radial basis function neural network, a dynamic surface back-stepping control method is proposed to deal with uncertain system and input saturation. 19

HFVs (X-33, X-34, and X-37).
Historical efforts1,9,12,21 also reveal back-stepping design has been an effective and promising tool for control problems. The advantage of back-stepping control design is its flexibility. Based on Lyapunov stability theory, the closed-loop control system stability is easily guaranteed. In some conditions, block back-stepping control law may offer significant advantages over the simple nonlinear dynamic inversion control law. 22 However, it requires a strict-feedback form of dynamic equations. A two-loop controller based on back-stepping is designed for HFV to attenuate uncertainties and disturbances during reentry process. 1 In the work by Zou et al., 12 a strict-feedback form control-oriented reusable launch vehicle (RLV) model is first proposed, and then, a novel robust adaptive back-stepping controller is developed to deal with input restraint, modeling uncertainty, and aero disturbance. By introducing a novel tracking function and a constant positive gain, the nonlinear back-stepping attitude controller in the work by Ali et al. 21 showed improved performance in decreasing the maximum control moment and the transient time. To simplify the design procedure of back-stepping controller, minimal-learning-parameter strategy is successfully introduced into a high-gain observer. 23 Fan system air speed control experiments showed the good performance of two back-stepping sliding mode control laws, one of which introduced an integrator to ensure precise responses and the other of which incorporated an estimator to estimate modeling uncertainty. 24
As digital computers are more and more popular with modern vehicles, control laws designed in discrete-time domain should be given more attention. 4 Neural networks are usually used to enhance control algorithms’ robustness to uncertainties and modeling errors. 25 Based on a generic hypersonic vehicle, Xu and colleagues4,26,27 have investigated the discrete back-stepping controller of the vehicle’s longitudinal dynamics. Single hidden layer feed-forward network and extreme learning machine are introduced into neural control design. The number of online adaptive parameters is reduced. 4 Neural network approximation and nominal feedback are used to design the virtual control. 26 Inspired by features of the social organizations, 28 new learning scheme is incorporated into the discrete neural back-stepping controller design.
Reconfigurable flight control is concerned with adapting control gains or switching control laws to adapt to failures and damages. Reconfigurable control systems significantly enhance the flight mission reliability. The robust reconfiguration technique adapts controller parameters to tolerate failures. However, control system based on control allocation only changes the allocation strategy. Control allocation reduces the difficulty of controller design and guarantees the closed-loop stability after reconfiguration. 29 In the work by Shtessel et al., 11 control allocation based on quadratic programming method of aero-surfaces is demonstrated. In the work by Doman and Ngo, 30 a linear programming control allocation operates in two modes: nominal minimum deflection mode and faulty null-space injection mode. When an actuator fault is detected, control allocation is switched to faulty null-space injection mode. Further research is conducted to compensate for effectors’ dynamics in the work by Oppenheimer and Doman. 31 Unlike continuous aero-surface effector, the reaction control jet is discrete. A mixed-integer linear programming (MILP)-based reaction control system (RCS) control allocator is compared with the traditional pulse-width modulation (PWM) approach.32,33 The MILP control allocator significantly decreases the number of RCS switch transitions. A L2 optimal control allocation of aero-surfaces and RCS jets is designed for missile autopilot. 34 The missile achieves good tracking performance in simulation environment.
In this article, a discrete reconfigurable controller is presented. Based on Euler numerical integration method, the attitude dynamics of HFV is transformed to discrete model. Considering model uncertainties and external disturbance torque, we design a discrete back-stepping controller. In order to weaken the influence of actuator failure, control allocation strategy is incorporated into the control design.
The rest of the article is organized as follows. First, the HFV discrete model to be used is presented; then, the discrete back-stepping control algorithm is discussed, followed by the control allocation strategy design. In the end, the applicability of the proposed method is demonstrated by its utilization to command tracking for HFV.
HFV modeling
Attitude dynamics
The nominal rotational dynamics of HFV is described by six equations as follows 11

where

In reentry mode,

Considering additive parametric uncertainty, inertia uncertainty

Equation (1) has a new form

where
Control goal
In spite of any initial condition
Discrete back-stepping controller design
Discrete-time model
Define

where
Using Euler numerical integration method with sample time


Discrete controller design
The errors are defined as


where
Step 1: From equations (6) and (8)

Treat

where diagonal matrix
From equations (9)–(11), we have the following equation

Step 2: Combining equations (7) and (9), we know

The control command

where diagonal matrix

Note that
Stability analysis
First, according to Lyapunov stability analysis of discrete-time systems, we choose a candidate discrete Lyapunov function

Then, the forward difference

Substituting equation (15) into equation (17), we get

Because each element of diagonal matrix
Second, we will demonstrate the stability of the whole system (z1 and z2). Choose the discrete Lyapunov function

where

According to matrix analysis theory, 35 we can easily get the inequality below

From

Selecting the values of
Control allocation
During reentry phase, HFV will proceed in three different stages according to different air density, dynamic pressure, Mach number, and altitude. In the first stage, because of the low air density, control torque provided by aero-surfaces is little. Therefore, RCS thrusters are the only effectors to adjusting attitude of HFV. Control torque vector
Referred to Figure 2, the difference between different stages is shown as follows:
First stage,
Second stage,
Third stage,

Block diagram of attitude tracker using discrete controller.
In stage 2, a “daisy chain” strategy-mixed RCS jets with aero-surfaces are studied. In order to save RCS fuels, RCS thruster control logic
MILP of RCS
Here, we use MILP method to allocate RCS thrusters.
32
Define a slack vector variable

The formulation of the pulsed RCS actuators control allocation problem is presented as follows

Subject to
where

where
Quadratic programming of aero-surfaces
The relationship between aerodynamic control torque

The weighted pseudo-inverse solution that minimizes equation (25) is given by

Simulation
In this section, the method proposed in sections “Discrete back-stepping controller design” and “Control allocation” is verified. The initial conditions are chosen as
The inertia tensor is taken as

Here, we suppose the representative HFV is equipped with eight ideal thrusters (eight flight thrusters and two spares). Based on the works by Lee et al.,
5
Doman et al.,
32
and Muss,
36
matrix

Inertia uncertainty

To get a reasonable tracking performance, the value ranges of parameters
Exo-atmospheric flight
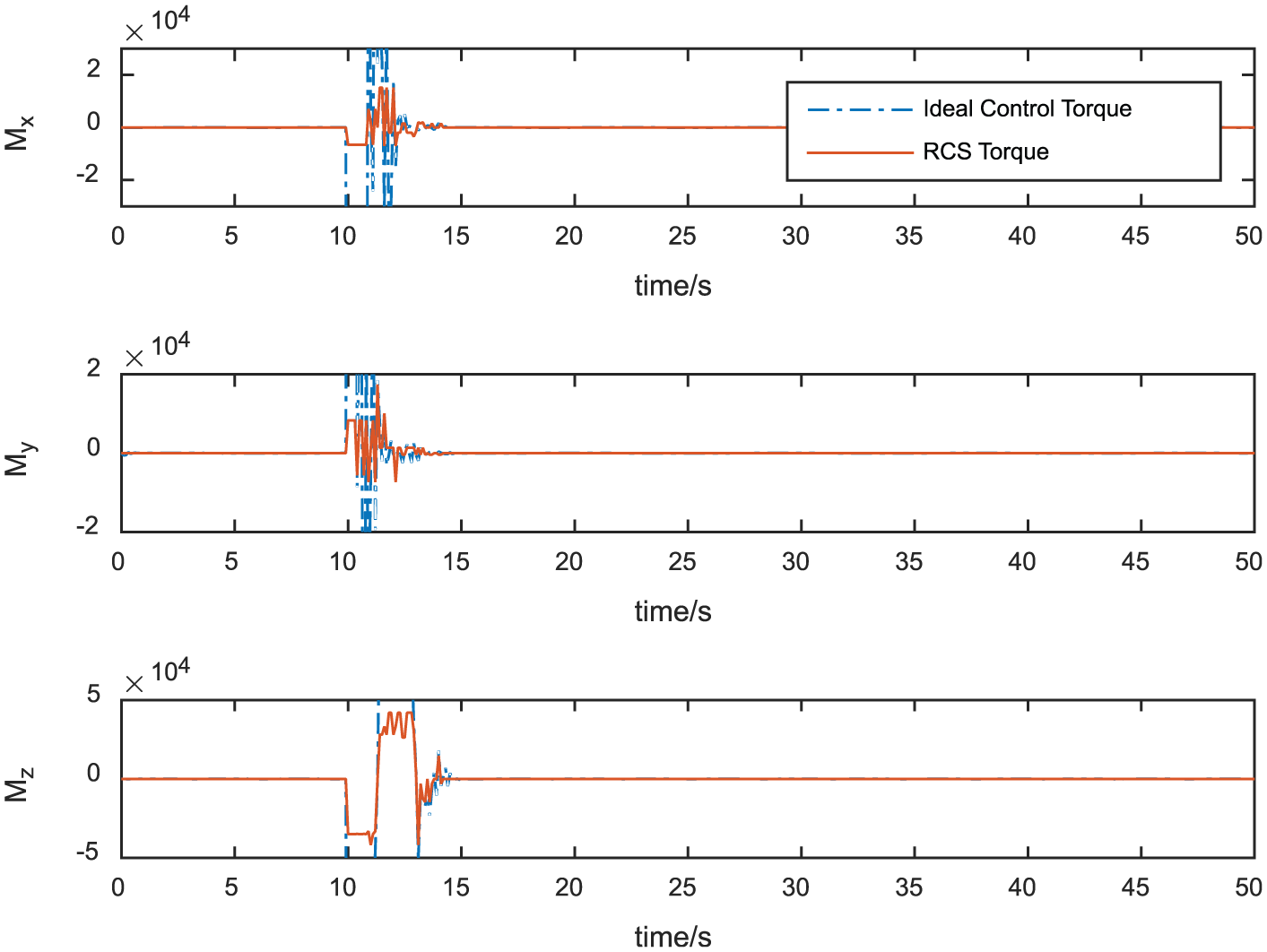
First, we present exo-atmospheric flight simulation results. In stage 1, RCS thrusters are the only actuators, which can provide control torque. Figure 3 shows the attitude command tracking results. One can see that the transient process is less damping. The overshoot is about 50%. This is because the RCS torque is always less than the command. Especially, torque saturation is a dominating feature in transient process, as shown in Figure 4. In transient process, command torque is about 10 times more than RCS torque.

Attitude command tracking results in exo-atmospheric flight.

RCS torque versus ideal command in exo-atmospheric flight.
Endo-atmospheric flight
Flight control in stages 2 and 3 incorporates aero-surfaces. Figures 5–7 show the simulation results of flight in stage 2. One can see from Figure 5 that transient performance is better than results in stage 1. In transient process, aero-surface torque is saturated and daisy-chained with RCS torque. One can also see that RCS torque is always no more than the ideal torque that aero-surfaces are inefficient to support.
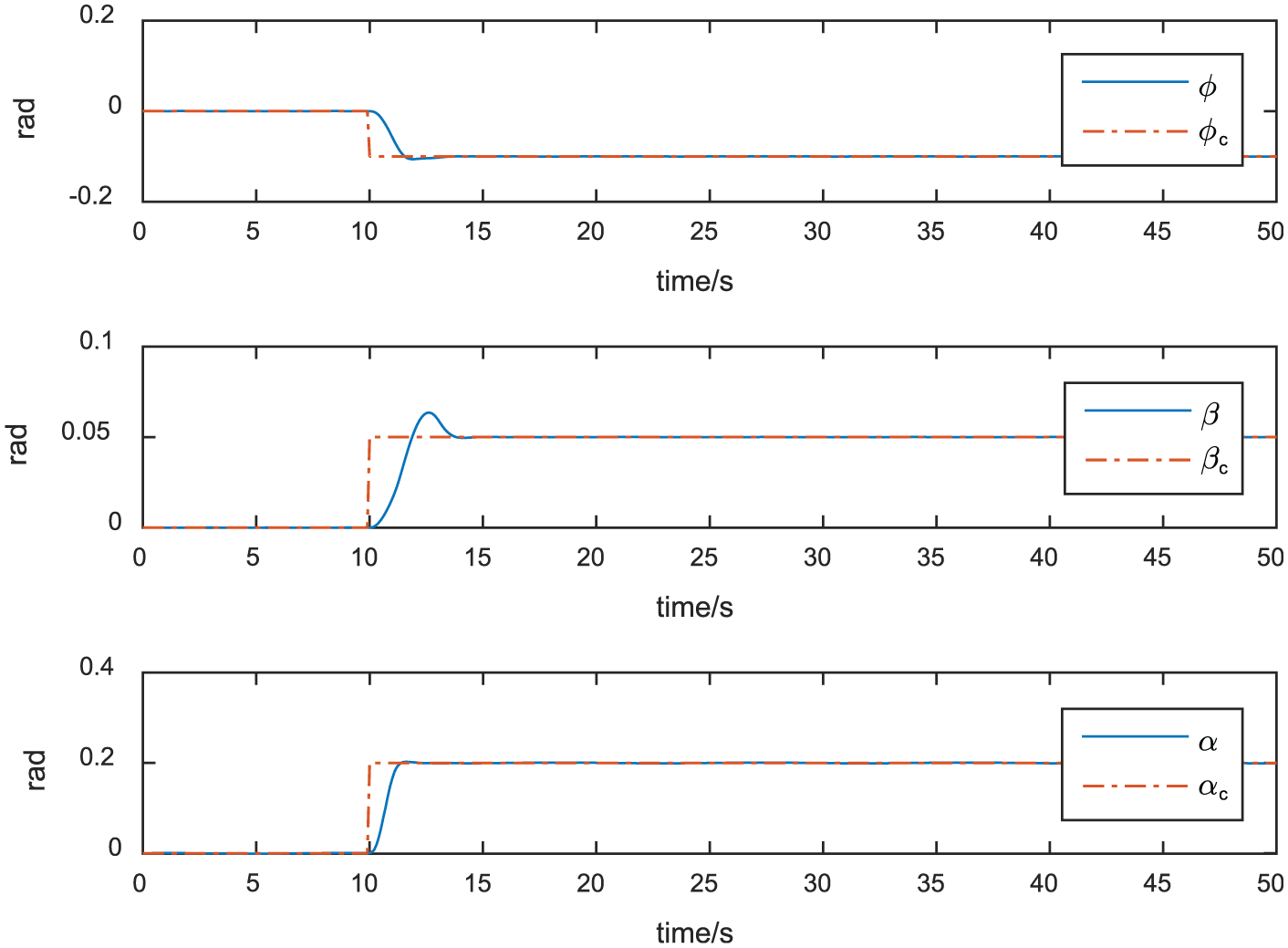
Attitude tracking result of mixed actuators (RCS and aero-surfaces).
Daisy-chained RCS torque.

Inefficiency of aero-surface torque.
Figure 8 shows the results in stage 3. The aero-surfaces are fully efficient. The transient performance is the best.

Attitude tracking result with full-efficient aero-surfaces.
Conclusion
This article has revealed the good performance of back-stepping technique to resolve the HFV’s attitude control problem in discrete-time domain. The discrete controller, in the presence of uncertainties and perturbations, accurately tracks the step attitude command. Stability analysis shows that the closed-loop asymptotic stability of HFV can be guaranteed by choosing reasonable parameters. Control allocation is introduced to resolve the effectors torque distribution problem of over-actuated system. The whole control strategy is validated in computer simulation.
Footnotes
Academic Editor: Chenguang Yang
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by the Fundamental Research Funds of Shenzhen Science and Technology Project (JCYJ20160229172341417), NSAF (no. U1630127), the National Natural Science Foundation of China (61622308), the Aeronautical Science Foundation of China (2015ZA53003), and the Natural Science Basic Research Plan in Shaanxi Province (2016KJXX-86).