
Abstract
To diagnose the fault in the pitch actuator of wind turbines which causes the change in pitch angles, a fault diagnosis method is proposed in this study. The method combines the interval prediction algorithm with the recursive subspace identification based on the variable forgetting factor algorithm. First, the recursive subspace identification based on the variable forgetting factor algorithm is used to estimate the linear parameter-varying model of the wind turbine, which solves the model uncertainty. Second, considering the boundary problem described by model uncertainties, the interval prediction algorithm is introduced based on the basis of the identification results. Moreover, whether the fault occurs or not is determined by judging whether the pitch angle is in the range of the upper and lower bounds. Thus, the robustness of fault detection is improved. Finally, the proposed approach is validated by simulation experiments.
Introduction
As a key component of the wind turbine system, the pitch actuator is mainly responsible for adjusting the pitch angle. 1 When wind speed is higher than the rated values and is lower than the cut-out values, the control objective is to maintain the wind turbine power at a constant level, which can be achieved by regulating pitch angles of the wind turbine. With the occurrence of pitch actuator faults, the dynamic response of the pitch angle either slows down or the pitch angle cannot be adjusted, which results in that the system cannot be controlled. 2 Therefore, timely diagnosis is critical.
For nonlinear systems, such as the wind turbine system,3,4 the use of the linear time-invariant model in practical application cannot meet the requirements of high-performance control. To obtain a good performance, the common method is to stabilize the system using a low-level controller and identify the local linear models in different operating points. Finally, a linear parameter-varying (LPV) representation can be obtained using the interpolation method in different local models.5,6 In other words, the linear variable parameter system is introduced to utilize the linear technology better.
7
The work presented in Toth et al.
8
revealed that the use of interpolation between local models leads to unstable representations of the LPV structure when the initial structure of the system remains stable. Considering this problem, the separable least squares method is proposed to identify the LPV model in state space in Borges et al.
9
Based on the fault diagnosis model in the literature, a residual vector is mostly used to describe the consistency between the monitoring system predictive and actual values. Ideally, residuals are only affected by residual faults. However, considering the actual effects of the noise disturbance and the residual deviation caused by modeling, the fault diagnosis algorithm must be robust. In Wingerden and Verhaegen,
10
a method that combines the interval prediction with the LPV subspace identification is proposed, which is characterized by robustness.
11
In the pitch system,
This study contributes a new fault diagnosis method for the wind turbine pitch system. This method combines the interval prediction algorithm with the recursive subspace identification based on the variable forgetting factor algorithm. Assuming that damping ratio and natural frequency have a variation with hydraulic pressure, the LPV model based on hydraulic pressure as a scheduling variable for the pitch system is estimated using the recursive subspace identification based on the variable forgetting factor algorithm. The input and output data matrices’ construction mechanism based on the variable forgetting factor is constructed, and the gradient-type algorithm is introduced into subspace tracking to estimate the generalized observable matrix, which avoids the biased approximation of the subspace. In addition, the interval prediction is introduced based on the identification of the LPV model. Then, the interval upper and lower bounds representing the fault-free conditions are obtained using the interval prediction method. The occurrence of the fault is determined by judging whether pitch angles are in the range of upper and lower bounds. Finally, the effectiveness of the algorithm is verified by the simulation experiment of the wind turbine pitch system.
The remainder of this article is structured as follows: section “Recursive subspace identification based on the variable forgetting factor algorithm” describes the recursive subspace identification based on the variable forgetting factor algorithm. Section “Interval prediction” introduces interval prediction. Section “Wind turbine model” provides the pitch model of wind turbines. Section “Simulation” verifies the effectiveness of the algorithm through simulations, and section “Conclusion” summarizes the article.
Recursive subspace identification based on the variable forgetting factor algorithm
The recursive subspace identification algorithm can be summarized in the following three basic steps: the construction of the data Hankel matrix, the solution of the generalized observable matrix (orthogonal factorization (QR), and singular value decomposition (SVD)), and the recursive estimation of the system matrix by the generalized observable matrix. This study adopts the recursive subspace identification based on the variable forgetting factor algorithm to improve the performance in tracking time-varying parameters. The online recursive identification of the state space model can be expressed as follows

where
To ensure the identification of the system and to verify the need for convergence analysis, the system is assumed to satisfy the following conditions:
External input u is not associated with noise w and v and meets the condition of full incentive.
Construction and updating design of Hankel matrices
The variable forgetting factor is introduced to improve the speed in tracking time-varying parameters.
12
Normally, the forgetting factor acts on the data in the following forms
13
(take outputs

In forming input and output sequence
The matrix


where

The state sequence

According to the definition of the above-mentioned matrix, the equation between the input and the output of the system is expressed as follows

where

Other matrices can be similarly defined. Assuming that the new input–output sequence


The construction of the matrix reveals that the data have different influences on varying identification time. For the system online updating model, the time-varying characteristic exists in the process for the data to track changes better in system information. The mechanism of the variable forgetting factor is introduced into the construction of the data matrix to improve the convergence rate of the recursive algorithm, and the self-adaptive updating design of forgetting factor can be seen from Huang et al. 12
The solution of the generalized observable matrix
This section uses the above-mentioned Hankel matrix with the variable forgetting factor to achieve the estimation of the generalized observable matrix

After obtaining the new data at time

To achieve the estimation of the generalized observable matrix


The following unconstrained optimization problem
17
is used to implement the recursive updating of

where
Subspace update formulas are expressed as follows



A recursive updating of the signal subspace is achieved by solving the unconstrained optimization problem, that is, the recursive estimation of the generalized observable matrix
Recursive implementation of system matrices
The input and output matrices based on the variable forgetting factor cannot be directly described by the products of the factor and the data matrices. And the approximate process is performed according to the following formulas 12

Based on the recursive least square (RLS) algorithm, the recursive estimation of the system matrix is obtained after determining the estimated value of the generalized observable matrix

Matrix A can be obtained by solving the following linear equation

Afterward, matrix A can be solved using the RLS method. The recursive algorithm can be expressed as follows 15

To achieve matrices B and D from matrix
At each moment,
Interval prediction
The interval prediction method is introduced
18
to improve the robustness of the recursive subspace identification based on the variable forgetting factor algorithm. Combining the interval prediction with the recursive subspace identification based on the variable forgetting factor algorithm improves the robustness of fault diagnosis while avoiding system instability. The interval prediction method is an extension of the classical system identification method, which is mainly used to provide parametric guarantees for nominal models and uncertain boundaries, including all the data collected in the model prediction interval within the fault-free situation. This method considers the additive and modeling uncertainties separately, in which the additive uncertainty is represented by the form

where

where


A model can be converted into the following regression form

where
In the interval prediction method, the interval prediction output is as follows

where



Fault detection is performed based on whether the model prediction output satisfies formula (25). When the output is in the range of the upper and lower bounds, the system is in the fault-free cases; otherwise, the system is faulty.
Wind turbine model
The wind turbine system can convert wind into electrical energy output, and it is mainly composed of the following systems: aerodynamic, pitch, drive chain, and generator systems.21,22 From the control point of view, the wind turbine mainly operates in two areas, namely, partial- and full-load regions. 23 Therefore, the wind energy is converted into mechanical energy in two ways: when the wind turbine is running in a partial-load region and the pitch angle is maintained at an optimal value, the energy conversion is achieved by regulating the generator speed. When running in a full-load region, the wind speed is relatively high and the generator speed is normally maintained at a rated value. Thus, the energy is converted by regulating the pitch angle. The mechanical energy is converted into the electrical energy by a generator fully coupled to a converter, and the drive chain is located between the rotor and the generator to increase the rotational speed from the rotor to the generator. 24 The pitch system model is only discussed here because the main purpose of this study is to diagnose the fault of the pitch system.
LPV model of the pitch system
In the wind turbine benchmark model, the pitch system is a hydraulic system, whose model can be regarded as a second-order dynamic system 25 expressed as follows

where

Marking

The Euler formula can be used to describe the system, as follows

where
In the pitch system,

where
Simulation
The Simulink simulation is based on the 4.8-MW wind turbine benchmark model, and this benchmark model is based on a realistic generic three-blade horizontal variable turbine with a full converter coupling. 28
Prediction interval based on the pitch system
The pitch system model can be converted into the following regression form 29

where
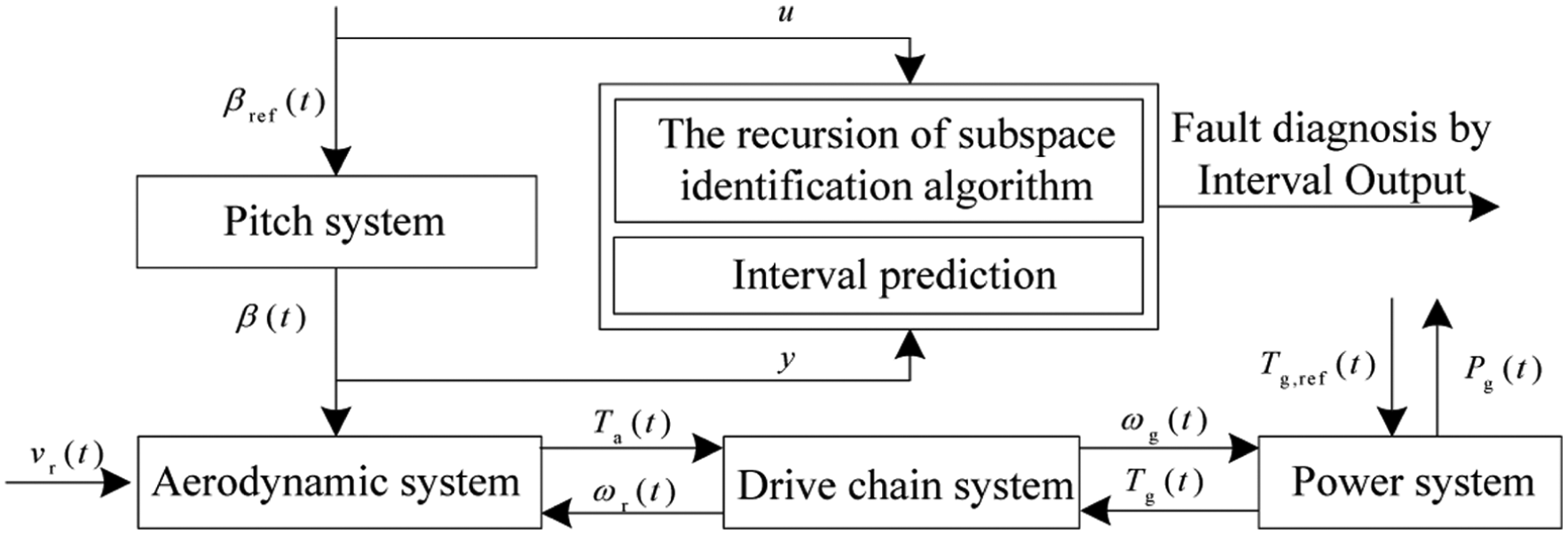
The overall structure of this study is shown in Figure 1. u is the function of inputs and y is the function of outputs. The input and output data are obtained using the variable forgetting factor recursive subspace identification algorithm to estimate the wind turbine pitch system LPV model. Then, the interval prediction method is introduced to obtain a robust fault diagnosis of the wind turbine pitch system.
Fault diagnosis description.
The pitch system is an LPV model which uses hydraulic pressure as the scheduling variable (see equation (32)) and the hydraulic pressure is affected in the event of faults. When faults occur in the hydraulic system, the system dynamics change because the main pressure drops, which alters the system parameters, as follows: the damping ratio changes in the range of 0.6–0.9 rad/s, and the natural frequency changes in the range of 3.42–11.11 rad/s according to the literature.
27

And

The interval upper and lower bounds shown in formulas (26) and (27), respectively, revealed that no faults occurred.
Fault setting
Additive time variation and pitch actuator faults are observed in the two cases of the constant and variable wind speed. The constant wind speed chooses 22 m/s and the variable speed chooses
Fault setting.

Simulation analysis
Normal operation
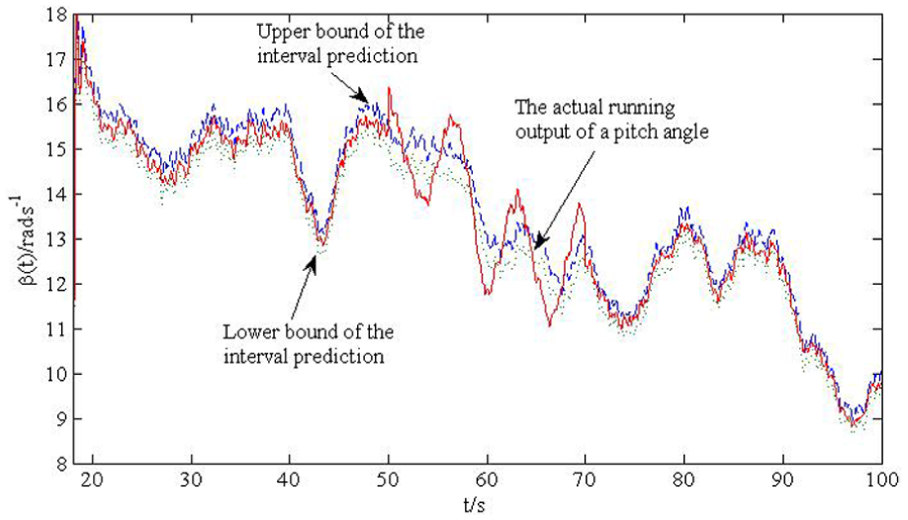
When the wind turbine is operating at a constant wind speed under normal operation, the fluctuation of the pitch angle is minimal. As shown in Figure 2, the pitch angle is stable, and the values are within the upper and lower bounds of the prediction interval. When the wind turbine is running under variable wind speed, the pitch angle must be adjusted accordingly with the change in the wind speed because the wind speed changes constantly and randomly, as shown in Figure 3. However, in cases when no faults occur, the pitch angle is always within the upper and lower bounds of the prediction interval, regardless of the change in the pitch angle.
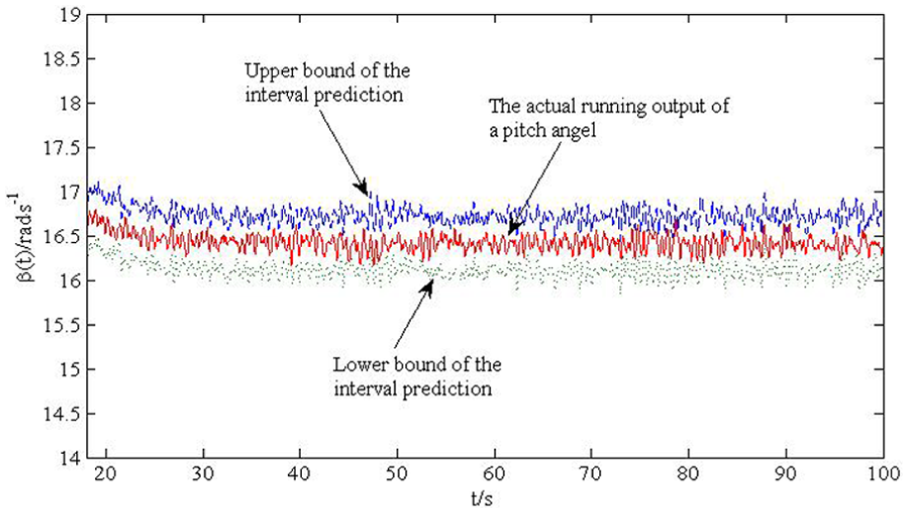
The pitch angle under constant wind speed under normal operation.

The pitch angle under variable wind speed under normal operation.
Additive time-varying fault
In the period of 50–70 s, an additive time-varying fault, that is, the cosine fault, is obtained under the conditions of the constant and variable wind speeds. Under the influence of the fault, the pitch actuator outputs superimpose a cosine signal, as shown in Figures 4 and 5. The figures show that from 0 to 50 s, the pitch angle is located within the upper and lower bounds of prediction interval, which indicates that the system operates normally. In the period of 50–70 s, the pitch actuator outputs superimpose the fault values so that the pitch angle exceeds the upper and lower bounds of the prediction interval, which demonstrates the system breakdown. After 70 s, the fault disappears and the pitch angle is back to the interval again, which indicates that the system operates normally.

The pitch angle under constant wind speed under cosine fault.
The pitch angle under variable wind speed under cosine fault.
Pitch actuator fault
In the period of 70–80 s, the high air content in oil is present in the actuator. The high air content in oil is a common fault, which changes the dynamics of the pitch system and causes a significant overshoot at the moment that the fault occurs and disappears resulting in system instability. The results of the fault diagnosis at the constant and variable wind speed are shown in Figures 6 and 7, respectively. The simulation results reveal that before 70 s, the pitch angle is located within the upper and lower bounds of the prediction interval, which shows the normal operations of the system. Between 70 and 80 s, the pitch actuator dynamic response slows down and the pitch angle cannot be adjusted in time, causing the pitch angle exceeding the upper and lower bounds of the prediction interval. After 80 s, the fault disappears and the pitch angle is back to the interval again, which indicates that the system is fault-free.

The pitch angle at constant wind speed under high air content in oil.

The pitch angle at variable wind speed under high air content in oil.
Conclusion
In this study, the proposed approach combining the interval prediction algorithm with the recursive subspace identification based on the variable forgetting factor algorithm is used to diagnose the fault in the pitch actuator of the wind turbine. The LPV model of the wind turbine is estimated using recursive subspace identification based on the variable forgetting factor algorithm, and the uncertainty of the model is solved in this manner. At the same time, the robustness of the fault detection is enhanced using the interval prediction method. When faults occur, the pitch angles’ curve goes beyond the boundary which represents the no-fault condition. The method is verified by conducting simulation experiments of the additive time-varying fault and the high air content in oil in the wind turbine pitch system. The simulation results show that the algorithm can meet the performance of fault detection.
Footnotes
Academic Editor: James Lam
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by the National Natural Science Foundation of China (nos 61572237 and 61672266).