
Abstract
The non-uniform rational B-spline is a mathematical model commonly used in computer-aided design and manufacturing. For a non-uniform rational B-spline surface, when a single weight approaches infinity, the surface tends to the corresponding control point. A natural question is that what happens if all of the weights approach infinity. In this article, we define the regular control surface, which is a kind of control structure of non-uniform rational B-spline surface, and prove that it is exactly the limiting position of the non-uniform rational B-spline surface when all of weights, multiplied by a certain one-parametric function with different values for each control point, go to infinity. It develops the geometric meaning of weights of non-uniform rational B-spline surface. Moreover, some examples are presented to show the application for the surface deformation by this property.
Keywords
Introduction
Machine parts in the mechanical processing, such as cam, blade, and mold are usually composed of complex curves or surfaces.1,2 Outlines of them cannot be represented by simple mathematical models. Since non-uniform rational B-spline (NURBS) surface can represent not only the standard analytic surface, such as conical surface, surface of revolution, or general quadric surface, but also the complex free surfaces, most of the outlines are represented by NURBS curves and surfaces. 3 Due to a series of unique advantages, NURBS is defined as the only one mathematical method for geometrical shapes of industrial products by International Standard Organization (ISO). Up to now, the NURBS method is effectively applied in many areas of computer-aided design and manufacturing (CAD/CAM), computer-aided geometric design (CAGD), and geometric modeling. Particularly, it has diverse applications in isogeometric analysis,4,5 reverse engineering,6–8 computer numerical control (CNC) machining,9–11 and so on.
The shape modification of existing objects plays an important role not only in mechanical processing 12 but also in geometric modeling due to its wide applications in industrial design and computer animation.13,14 It is important to correlate the shape of the nominal CAD model with the shape of the manufactured part. Brujic et al. 15 presented a method to update the CAD model consisting of NURBS surfaces based on a set of unorganized measured points. Plenty of geometric modeling techniques have been proposed for modifying and deforming shape.16–20 Usually, the shape modification of NURBS surfaces can be achieved by means of knot vectors, control points, and weights. Piegl 21 and Piegl and Tiller 22 presented the geometric meaning of a single weight of NURBS surface: if a weight approaches infinity, the surface tends to the corresponding control point. Based on this, weight-based modifications and control point–based modifications to the shape of NURBS surface were presented by Piegl. 21 If more weights are used, the methods will be more complicated. Juhász 23 addressed the problem of shape modification of NURBS curves by altering several weights, and he also outlined how to carry over to surfaces the results for curves. However, fewer works focus on explaining the meaning when all of the weights tend to vary (even to infinity). We extend their methods to more general cases to explain what happens if all of the weights of NURBS surface approach infinity simultaneously.
Warren 24 created the hexagonal Bézier surfaces and predicted that the further work incorporating toric variety may lead to practical methods for multi-sided patches. Sturmfels 25 introduced the theory of toric varieties, toric ideals, and Gröbner bases in detail. In 2002, Krasauskas 26 presented a kind of multi-sided surface patch, named toric surface patch, whose mathematical theory is based on toric variety from algebraic geometry and toric ideals from combinatorics. The toric surface patches are multi-sided generalization of classical Bézier curves and surfaces. Craciun et al. 27 proposed the concept of lifting function to get regular triangulation, control structures, and limiting patches of the rational Bézier surfaces, which were restricted to triangulations. In 2011, García-Puente et al. 28 presented the toric degenerations of toric surface patches and explained the geometric meaning of regular control structures (surfaces) of toric surface patches while all of the weights tend to infinity, which is the generalization of the geometric meaning of single weight of a rational Bézier curve/surface in Piegl 21 and Piegl and Tiller. 22 Zhu 29 gave the toric degenerations of toric varieties and toric ideals induced by the regular decomposition. Wang et al. 30 presented an algorithm to compute the number of regular control surfaces of a toric surface patch. The injectivity of curve and surface, which means no self-intersection, plays an important role in image warping and morphing, 3D deformation, volume morphing, and mechanical design. Zhu and Zhao31,32 presented the geometric conditions on the control points for checking the injectivity of rational Bézier curves and surfaces. These geometric conditions on the control points also depend on the given lifting functions.
Since a NURBS surface can be decomposed into piecewise Bézier surfaces by knot insertion, the toric degenerations of Bézier curves/surfaces can be applied to study the geometric properties of NURBS curves/surfaces. Zhang et al. 33 studied the toric degenerations of NURBS curves and stated that the limit of a NURBS curve is exactly its regular control curve when all of the weights go to infinity. If a lifting function was given, then the corresponding regular control structure (curve) can be obtained. The result of Zhang et al. 33 was applied for checking the injectivity of NURBS curves. 34
In this article, we define the regular control surface, which is a kind of control structure of NURBS surface, and prove that it is exactly the limiting position of the NURBS surface when all of the weights tend to infinity. This result not only generalizes the geometric property of a single weight of NURBS surface and explains the geometric meaning of weights of NURBS surface but also provides the possible applications for the injectivity checking and shape modification by many weights of NURBS surface. Furthermore, this result provides a potential application for computer animation.
The body of this article begins with a brief review of rational Bézier surface and its toric degeneration in section “Rational Bézier surface and its toric degeneration.” In section “On the limits of NURBS surfaces with varying weights,” we define a kind of special control structure of NURBS surface, which is called regular control surface. We prove that regular control surface is the limit of the NURBS surface when all of the weights approach infinity. Furthermore, we demonstrate that if a point set is the limit of a NURBS surface for a sequence of weights, then this set must be a regular control surface induced by some regular decomposition. In section “Examples,” we give some examples to explain the meaning of the regular control surfaces and provide some examples of application for surface deformation. Finally, we conclude the whole article.
Rational Bézier surface and its toric degeneration
Definition 1
Given control points

where
Krasauskas
26
presented a kind of multi-sided surface patch, named toric surface patch, which is a multi-sided generalization of classical triangular and tensor-product Bézier surfaces. Let
Definition 2
Given

where
Let coefficients
Definition 3
Given

where
Therefore, we use Definition 3 to represent a rational tensor-product Bézier surface in the rest of this article. Let
Suppose that we have a regular decomposition
Definition 4
The union of toric surface patches 28

is called the regular control surface of rational Bézier surface
Let
Definition 5
Given

Write
Theorem 1
Theorem 1 is as follows 28

Theorem 2
Given

then there exists a lifting function
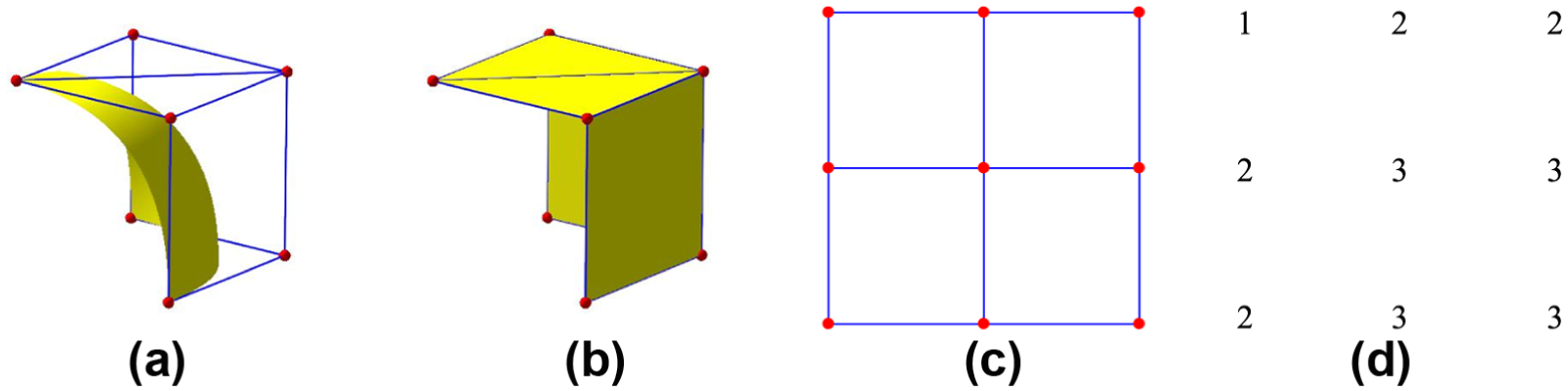
Example 1
Let
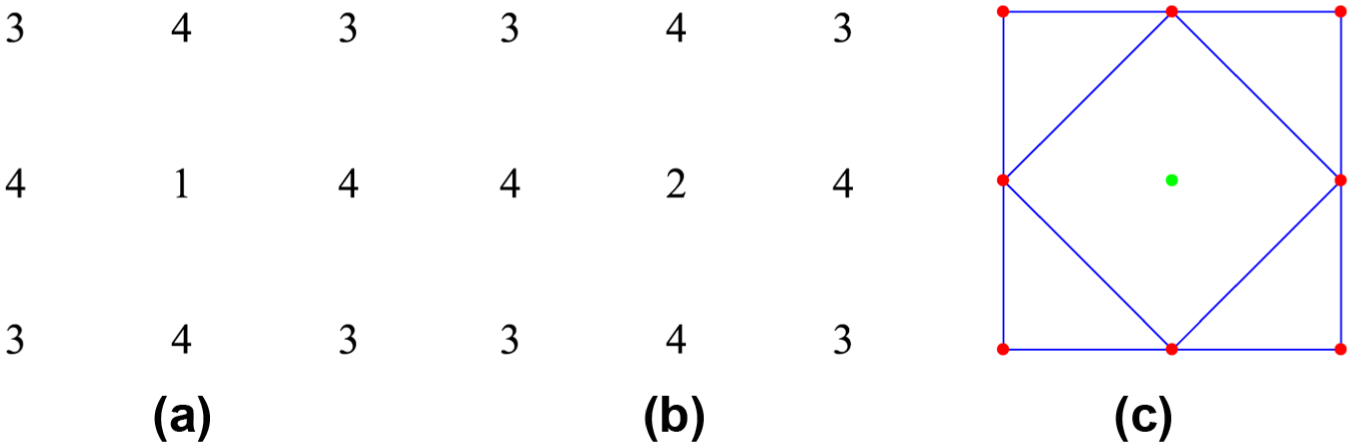
(a) Weights set

The regular control surface of rational Bézier surface: (a) rational Bézier surface
On the limits of NURBS surfaces with varying weights
Regular control surface
Definition 6
A NURBS surface of degree

where
The control net
Without loss of generality, we assume that
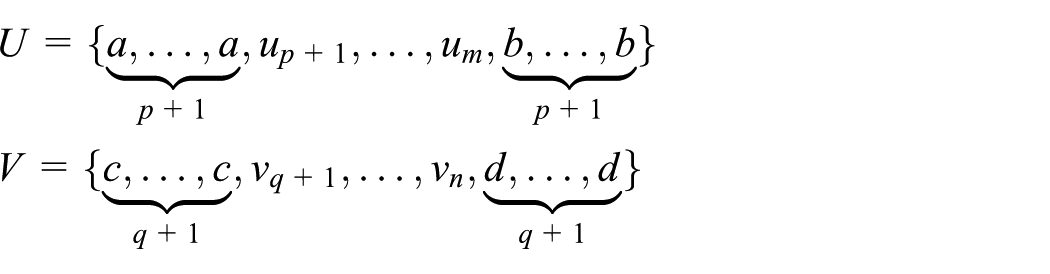
In this article, we use the following representation to represent a NURBS surface
Definition 7
Given

where


Write
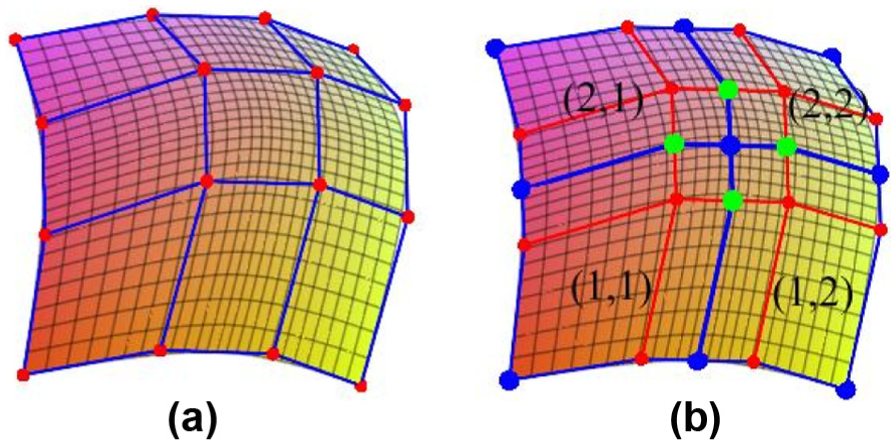
NURBS surface is subdivided into piecewise Bézier surfaces: (a) the biquadratic NURBS surface and (b) Four pieces of rational Bézier surfaces after knot insertion.
Note that after all interior knots are inserted and the piecewise Bézier surfaces are generated, we can get all of the control points and weights for the NURBS surface

and

where

We define a NURBS surface parameterized by
Definition 8
Given

is called the NURBS surface
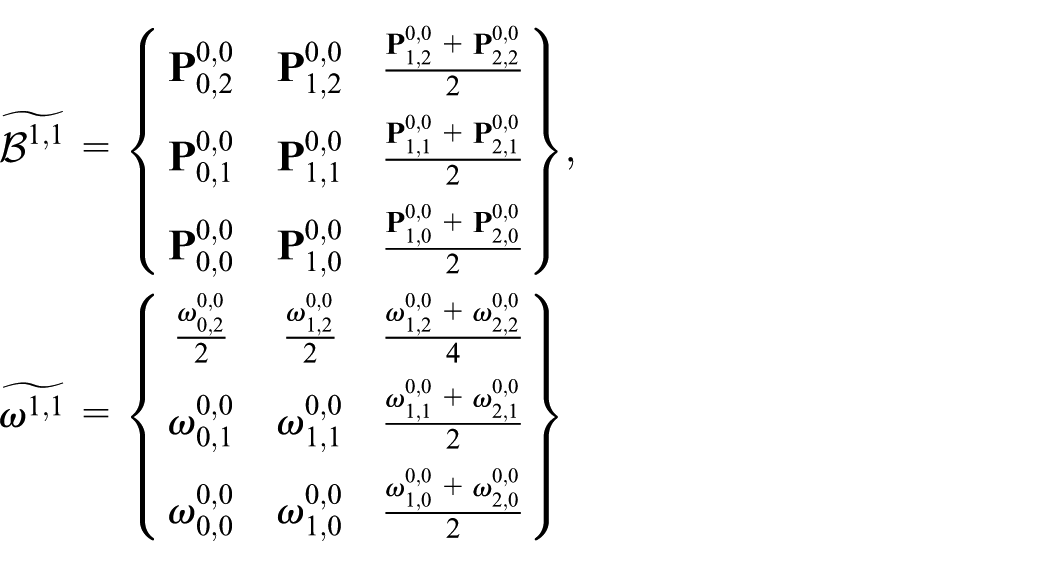
Suppose that the original weights set

According to the regular decomposition
Definition 9
The union of regular decompositions
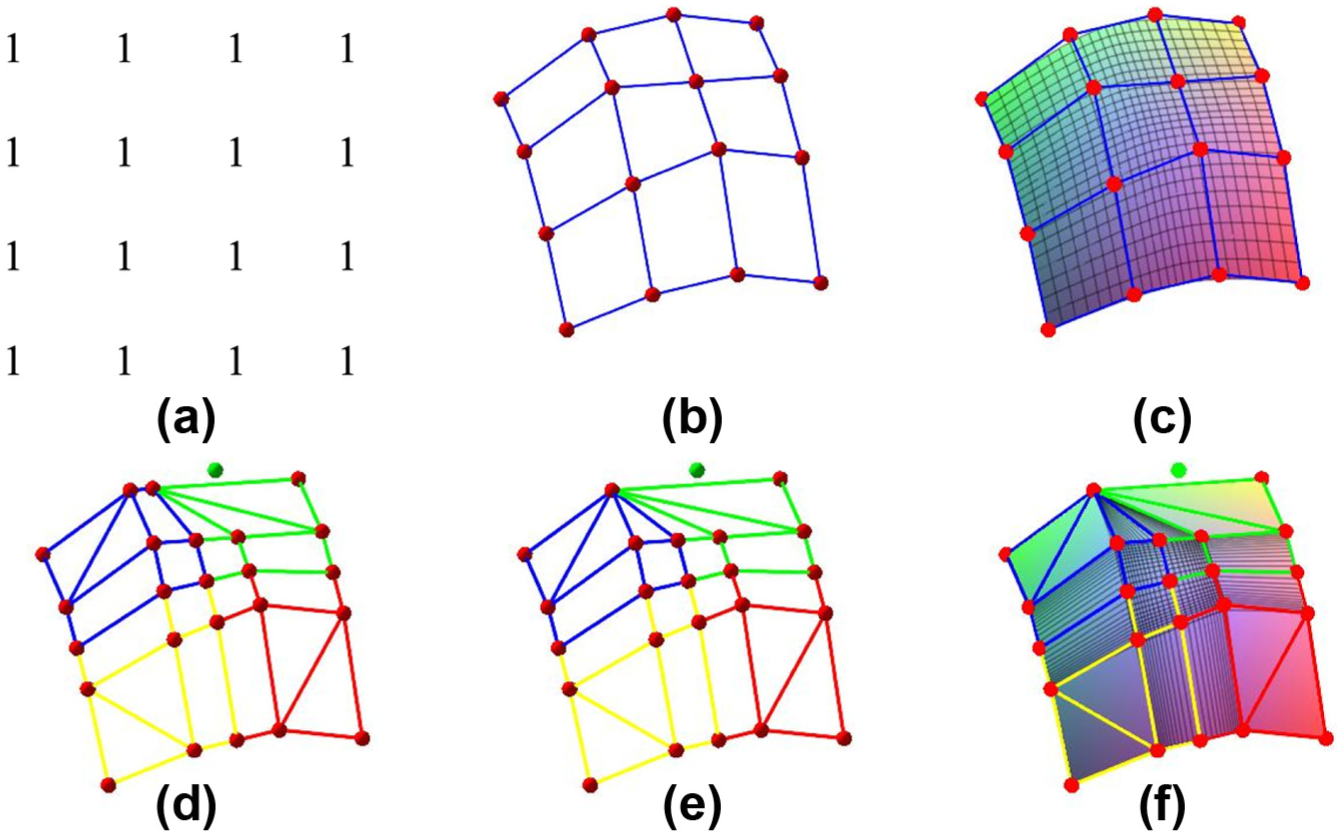
Example 2
Let

The lifting values and regular decomposition: (a) lifting values of
Define the net formed by connecting the control points of NURBS surface
Consider the control points

where coefficients
Since

We denote
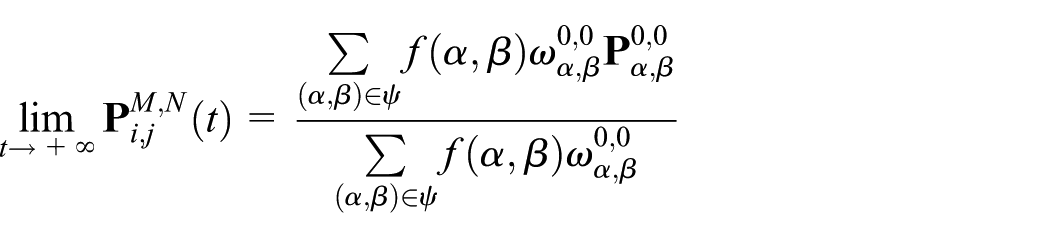
Using this method, the positions of control points of the

which is the limit of
Definition 10
Given

is called the regular control surface of NURBS surface
Example 3
Consider a biquadratic NURBS surface
Regular control surface and regular control net of NURBS surface
Toric degenerations of NURBS surfaces
It is easy to see that the regular control surface
Theorem 3
Let

Proof
Using knot insertion, the NURBS surface

For

where ∥·∥ is the Hausdorff distance between two subsets of

This limit is with respect to the Hausdorff distance. Since

thus

According to equations (4)–(6), the following result can be obtained

Since

By Definition 10,

To sum up

The proof is completed.
Since this property is proved based on toric degeneration of Bézier surface, we call it is the toric degeneration of NURBS surface. The above result shows that the regular control surface is just the limit of a NURBS surface under the toric degeneration. By the same method, we can prove that the regular control net of
Theorem 4
Let

then there is a regular decomposition
Proof
Using knot insertion, NURBS surface

where
If a set

By Theorem 2, there is regular decomposition
Let

Choose the finite set

is a regular control surface. The proof is completed.
Examples
In this section, we give some representative examples to illustrate the meaning of regular control surface of NURBS surface. We give more details about the construction of the regular control surface and the procedure of the toric degenerations of NURBS surface in Example 4. In Examples 5 and 6, we will omit the details and illustrate only the final regular control surface and regular control net. Moreover, some examples for surface deformation using the toric degenerations of NURBS surfaces are also presented. This provides potential applications for computer animation.
Example 4
Let

Regular control surface and regular control net of NURBS surface
Suppose that a lifting function

The lifting values and regular decomposition: (a) lifting values of
Consider the rational Bézier surface
are obtained. By the regular decomposition
Similarly, the regular control surfaces of the other three pieces of rational Bézier surfaces can be obtained. Because the positions of control points change by altering of the parameter

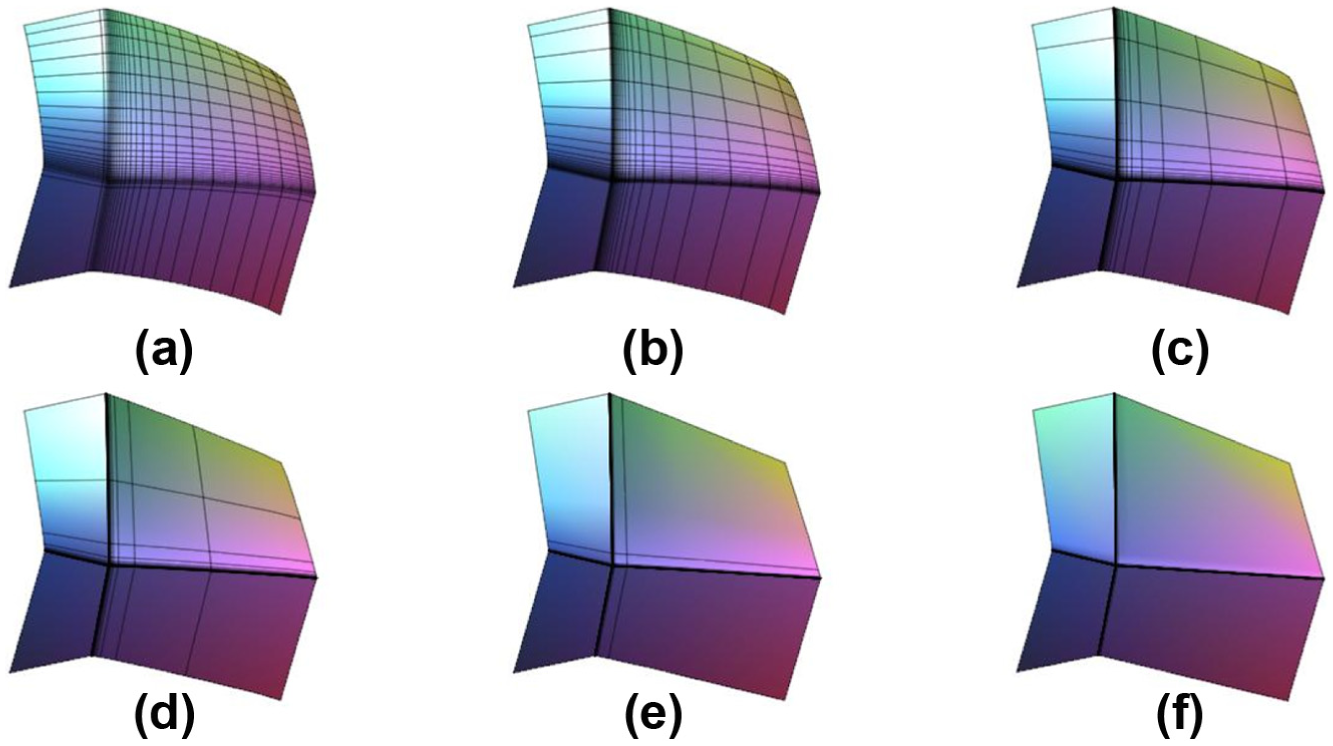
Toric degeneration of the biquadratic NURBS surface
Example 5
Let

A biquadratic NURBS surface

The lifting values and regular decomposition of

Toric degeneration of the biquadratic NURBS surface
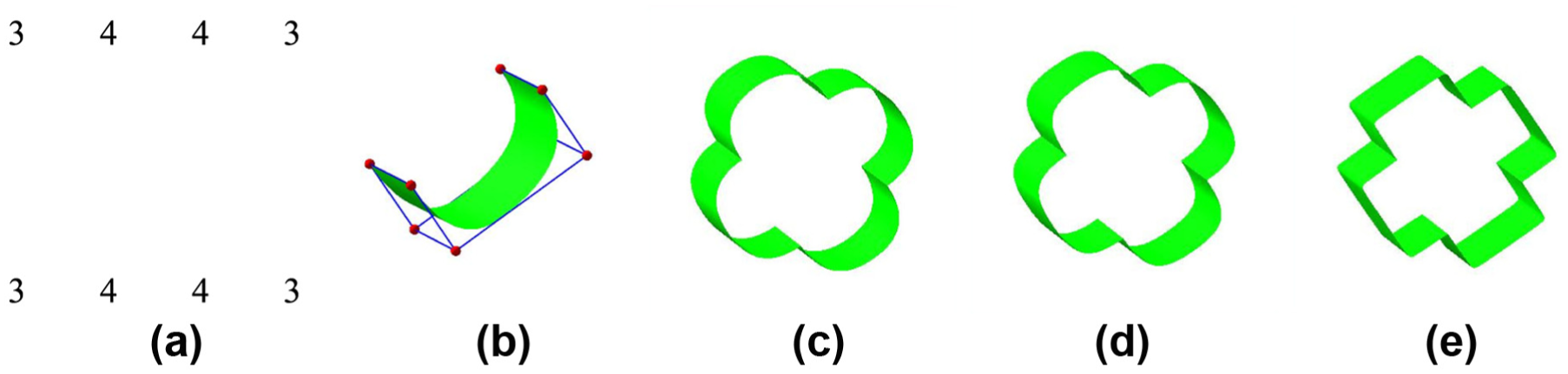
Example 6
Consider a bicubic NURBS surface

A bicubic NURBS surface
Toric degeneration of the bicubic NURBS surface
In the next four examples, we indicate the application of our result for shape deformation. Through the toric degenerations of NURBS surface, if the regular decomposition of
Example 7
Given some data points (see Figure 14(a)), we use two pieces of NURBS surfaces to fit these data points, and these two surfaces are combined into a sphere (see Figure 14(b)). In this example, we aim to deform this sphere to a cube, which is the convex hull of these control points (see Figure 14(c)). The sphere is spliced by two pieces of NURBS surfaces of degree
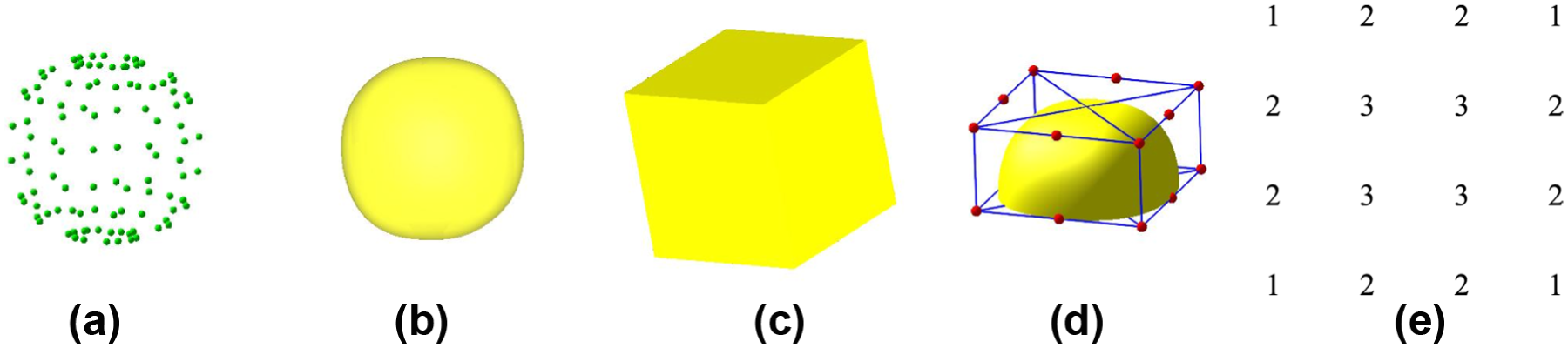
The NURBS surface: (a) data points, (b) original surface, (c) target surface, (d) control net, and (e) lifting function.
The 1/8 of the sphere: (a) rational Bézier surface, (b) target surface, (c) regular decomposition, and (d) lifting function.

The shape deformation procedure of a sphere: (a) t = 1, (b) t = 3, (c) t = 7, and (d) t = 9.
Example 8
Figure 17 shows the shape deformation processes of a sphere using toric degenerations of NURBS surfaces. The lifting function and control net of each piece of NURBS surface are shown in Figure 17(a) and (b), respectively. The sphere is composed of two pieces of NURBS surfaces of degree

The shape deformation procedure of a sphere: (a) lifting function of each piece of NURBS surface, (b) control net of each piece of NURBS surface, (c) t = 1, (d) t = 5, and (e) t = 40.
Example 9
Figure 18 shows the shape deformation procedure of a mold using toric degenerations of NURBS surfaces. The mold is composed of four pieces of NURBS surfaces of degree
The shape deformation procedure of a mold: (a) lifting function of each piece of NURBS surface, (b) control net of each piece of NURBS surface, (c) t = 1, (d) t = 2, and (e) t = 30.
Example 10
Using toric degenerations of NURBS surfaces, the shape deformation procedure of the surface of an apple is shown in Figure 19. The surface of this apple is composed of four pieces of NURBS surfaces of degree

The shape deformation procedure of the surface of an apple: (a) lifting function of each piece NURBS surface, (b) control net of each piece NURBS surface, (c) t = 1, (d) t = 2, and (e) t = 13.
Conclusion
In this article, we define the regular control surface of NURBS surface by regular decomposition and develop the geometric meaning of weights of NURBS surface. The regular control surface is exactly the limit of the NURBS surface when the control points are fixed but all of the weights approach infinity. It means that when all of the weights tend to infinity, the NURBS surface approximates not all of control points simultaneously, but rather a part of control points. Moreover, a set is a regular control surface, if it is the limit of NURBS surfaces on finite set with settled control points, but with differing weights. Our work provides possible application for the injectivity of NURBS surfaces, which plays an important role in image warping and morphing, 3D deformation, and volume morphing. Moreover, we also provide an idea for shape modification and shape deformation of NURBS surface by altering many weights.
Footnotes
Academic Editor: ZW Zhong
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was partly supported by the National Natural Science Foundation of China (Nos 11671068, 11601064, 11271060, and 11290143), Fundamental Research of Civil Aircraft (No. MJ-F-2012-04), and the Fundamental Research Funds for the Central Universities (No. DUT16LK38). The authors are very grateful for the reviewers’ comments and suggestions on their submission, which improved the clarity of the manuscript.