
Abstract
This article combines a new method based on signal decomposition and reconstruction with a fifth-order numerical algorithm and proposes an efficient hybrid method for solving forward kinematics problem of parallel manipulators. In this hybrid method, new method can first generate an approximate solution of the forward kinematics problem, which will be taken as initial guess for the fifth-order numerical technique. The answer with desired level of accuracy is then obtained. The superposition principle is proposed stating that each rod’s displacement required to drive the mobile platform with 6-degree-of-freedom coupled motion is approximately a sum of the rod’s displacement required to drive it with each of six single basic motions including roll
Introduction
Parallel robots are closed-loop kinematic structures mechanically composed of a mobile platform with an end-effector, a base platform, and three or more articulated links connecting the mobile platform to base. Each link houses a linear actuator near the link base, enabling link length changes to control the final position and orientation of the mobile end-effector. Because of their unique properties like high precision and large load-to-weight ratios, parallel robots have been widely applied in different fields such as motion simulators, 1 machine-tool industry, 2 and computer numeric controls. 3
As one of the key research issues in parallel robots, the kinematic problem is divided into two lines of research, that is, the inverse kinematics problem (IKP) and the forward kinematics problem (FKP). Compared with the IKP mapping of the task workspace to joint space, the FKP mapping of the joint workspace to task space is relatively difficult. Moreover, obtaining a fast and precise forward kinematics method is an essential step in modeling and in the control of the parallel robots, especially for real-time applications. Therefore, finding an efficient way to solve the FKP and to reduce its computation time has always been one of researchers’ priorities.
The coordinates of hinges of the mobile platform relative to the base platform are deduced from the coordinate transformation approach. Based on the relationship between these coordinates and the length of rods, there are some highly nonlinear forward kinematics equations of the workplace, which are not easy to be solved analytically. Parikh and Lam 4 extended a neural-network-based hybrid strategy to the forward kinematics. This performing concept was then combined with a standard Newton–Raphson (NR) numerical technique to yield a hybrid solution strategy. Because the NR method is a second-order numerical algorithm, the desired accuracy can be achieved in less number of iterations and shorter time by higher-order methods. Therefore, Kardan and Akbarzade 5 combined a new structure of artificial neural network 6 same class one network with a third-order numerical algorithm and proposed an improved hybrid method (IHM) for solving the FKP of parallel manipulators.
In this article, by combining a new method based on signal decomposition and reconstruction with high-order iterative method7,8 together with the use of a new decomposition technique, a new hybrid strategy is proposed for solving the FKP of parallel robots. An effective way to increase the convergence speed of numerical algorithms is to provide them with more accurate initial guesses. In the proposed method, the new method based on signal decomposition and reconstruction is first used to identify the kinematic parameter like the end-effector’s position and orientation as the next step initial guess. Then, fifth-order numerical technique uses the approximate solution as an initial guess to find the exact answer in real time with the desired level of accuracy. The performance of the proposed method is evaluated by applying it to Stewart platform (SP) and test bench for bogie parameters (TBBP). Compared with the NR method and IHM, the proposed method achieves the desired accuracy in less number of iterations and a shorter time.
Therefore, the main contributions of this article can be summarized as follows:
This article combines a new method based on signal decomposition and reconstruction with a fifth-order numerical algorithm and proposes an efficient hybrid method (EHM) for solving FKP of parallel manipulators.
First, superposition principle with respect to the rod’s displacement that each rod’s displacement required to drive the mobile platform with 6-degree-of-freedom (DOF) coupled motion is a sum of the rod’s displacements required to drive it with each of 6 single basic motions including roll
To improve the speed and the accuracy of the solution, high-order iterative method is used, which has better efficiency index to solve the system of nonlinear equations using the new decomposition technique.
FKP of parallel robots’ description
Parallel robots are closed-loop kinematic structures. In particular, the 6-DOF parallel manipulator comprised a mobile platform with an end-effector, a fixed platform, and three or more articulated links connecting the mobile platform to a fixed platform and supports the mobile platform.
9
The body frame
where matrix

where
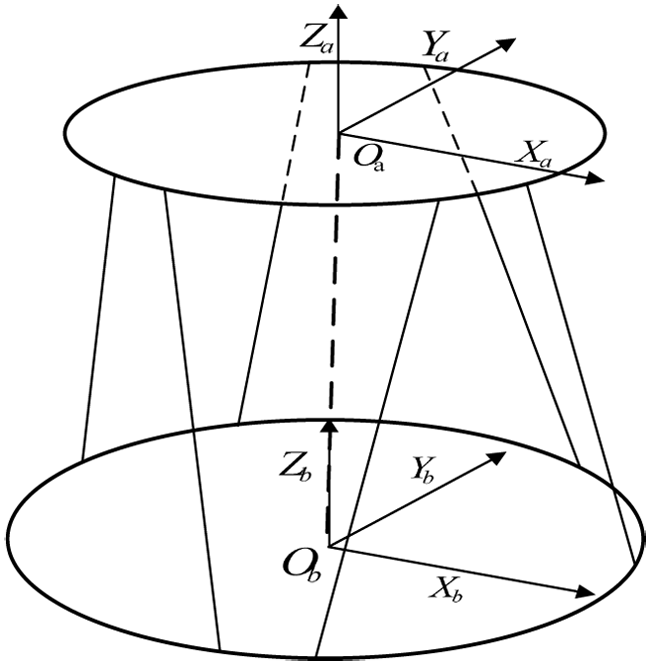
Definition of coordinate frame for the parallel manipulator.
Efficient method for solving the FKP of parallel robots
Kinematics model
Define

where
Superposition principle of cylinder displacement
By inverse kinematic model, the rods’ displacement of parallel manipulator used to control the final position and orientation of the mobile end-effector are confirmed

where

where
The term

The term

The term

The term

The term

The term


where
We prove the superposition principle as follows

Different actuator rod’s trajectories have the same mathematical model as shown in equations (6)–(12). Take

Therefore, equation (5) is thus simplified as

Moreover

We can define

where

Since

By substituting equations (16)–(18) into equation (19), we get

Since

According to equation (19) and property of inequality


where

based on the actual situation, when
This conclusion shows that the final trajectory of rod displacement is a linear superposition of the trajectories under all the basic motions with a certain difference calculated by subtraction of the sum derived from superposition principle and coupling value. However, this difference brought by parallel mechanism’s nonlinearity negatively affects the accuracy of solution. According to the actual operational conditions and workspace analysis of parallel mechanism,
Superposition principle is more applicable to the robots with small rotational workspace. The solution is directly solved under superposition principle. Even though the rotational workspace is expanded, the solution still meets the required accuracy of initial value of high-order iterative technique for obtaining its exact solution. The approach of linear decoupling based on signal decomposition and reconstruction can reduce the blindness on selecting initial value and then improve the high-order iteration method’s convergence speed to obtain the accurate real-time solution.
Ratio matrix model
First, the principle of signal deconstruction and reconstruction is applied to solve FKP of 6-DOF parallel manipulator. Superposition principle is proposed stating that each rod’s displacement required to drive the mobile platform with 6-DOF coupled motion is a sum of the rod’s displacements required to drive it with each of 6 single basic motions including roll
Given differential operator impulse

The specific ratio matrix derived from the mapping relationship between the position of the moving platform and the displacement of the rod is obtained. According to the fact that different parallel manipulators have different geometric shapes, special ratio matrix is thus analytically obtained. Then, in accordance with the principle by which the order of magnitude of rod displacement required to drive the moving platform with each of 6 single basic motions should be as close as possible, differential
12
operator matrix


In this article, a type of matrix arithmetic is defined

Based on the superposition principle, the equations used to solve the real-time position are established (see equation (27))
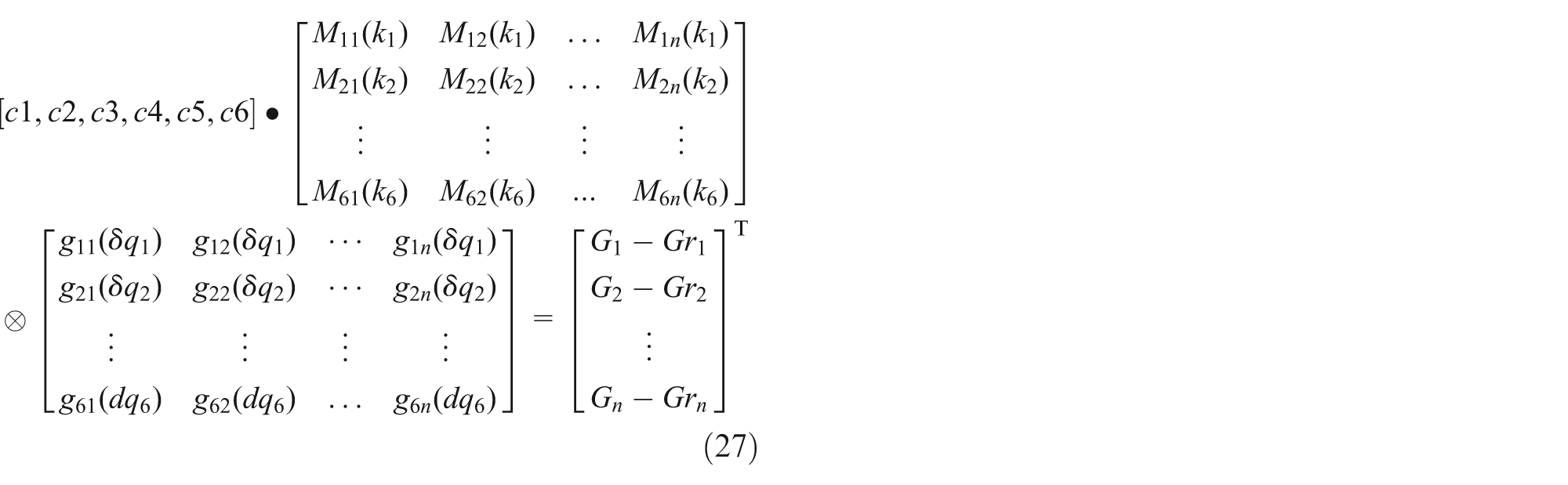
where
High-order iterative method
To solve the nonlinear equations without divergence by Taylor expansion and Newton-type iteration, Yang et al.
13
proposed a modified global Newton–Raphson (MGNR) algorithm. By Adomian decomposition, Darvishi and Barati
7
extended a third-order algorithm that does not require second derivative of the equations and they proved that this algorithm benefits from a third-order convergence. The algorithm was then applied by Kardan and Akbarzadeh
5
to solve FKP of parallel robots. Moreover, Waseem et al.
8
constructed a sequence of high-order iterative methods for nonlinear equations system through a new decomposition technique mainly due to Daftardar-Gejji and Jafari
14
and proved that the methods were higher-order convergent and had better efficiency index. This decomposition of nonlinear operator

In this work, this iterative algorithm is used to solve the nonlinear equation system of FKP of parallel robots. For a given


where

Algorithm 1 has been proved to be the fourth-order convergence and Algorithm 2 to be the fifth-order convergence. In the following sections of this article, the better performance in less number of iterations and shorter time than the existing method will be proved.
Hydraulic actuator model
Researchers have already discussed the influence of the linearized servo-valve dynamics model and obtained a satisfactory result;
14
so in this article, the servo-valve dynamics
15
is neglected and hence input signal
Assuming there is no external leakage, 16 the cylinder dynamics can be simplified as

where


where

where
Sample robots
SP
The SP is composed of a base platform and a mobile platform supported by six actuators connecting together the base with the moving platform. As Figures 1 and 2 show, SP is a 6-DOF parallel robot with three rotations around X-, Y-, and Z-axis and three translations along X-, Y-, and Z-axis. The body frame

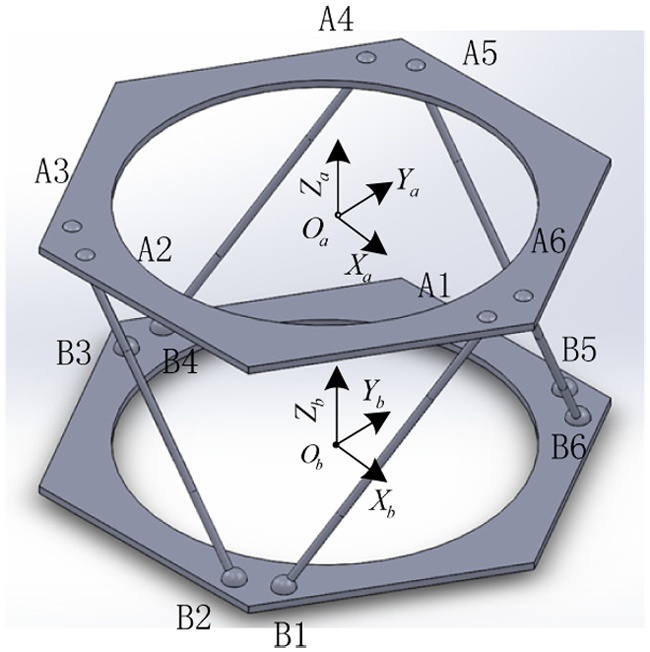
Structure of Stewart platform.
According to SP’s geometrical characteristics, substitute its structure parameter matrices A and B into equation (24). SP’s ratio matrix

TBBP
Made as a special detecting device for testing the relevant parameters of a bogie, TBBP is composed of two independent motion platforms, that is, 1# 6-DOF Motion Platform and 2# 6-DOF Motion Platform (Figure 3). Seven identical hydraulics actuators, including four vertical ones, two longitudinal ones, and a single transverse one support both the two platforms. The 2# 6-DOF motion platform coordinate system attached to the mobile platform is established first. Figure 3 illustrates the serial numbers of the seven actuators mounted on the 6-DOF motion platform. Actuator 1_5 and actuator 1_6 are longitudinal and parallel, while actuator 1_7 is transverse. These three actuators are coplanar. The centerlines of the three actuators intersect at two intersections. The midpoint of the line determined by these two intersection points is set as origin of global coordinate system, marked as


TBBP structure.
According to TBBP’s geometrical characteristics, its structural parameter matrices A and B can be substituted into equation (24). TBBP’s ratio matrix

TBBP is a 6-DOF redundant structure. The workspace of such a bench is limited due to the constraint of actuator’s range, constraint of kinematic pair’s rotational range, and the geometrical interference (either intersection between two actuators or between actuators and bench) during the dynamic motion. On the basis of the range of actuator and the inverse kinematics model, the maximum rotational angles
Simulation of EHM and result
In this section, EHM is used to analyze the FKP of TBBP and SP, and their performances are evaluated in comparison with the NR algorithm, as well as the IHM. To assess the EHM performance, its outputs calculated by single iteration of numerical algorithm are shown from Figures 4–6. Convert the desired robot’s trajectories into rod displacement by inverse kinematic. Transfer the rod displacement to electro-hydraulic servo actuators to make sure that robot will act in accordance with targeted trajectory. A more accurate solution is next taken as the initial value of the fifth-order numerical technique and calculates the solution with the desired accuracy with less number of iterations and in shorter time. Parallel mechanism can track a parameterized reference trajectory which can rotate around upper platform’s geometric center or around any point in workspace. The coordinate difference between that point in workspace and the geometric center of the upper platform is called the offset. In this article, a way to identify the offset based on Fourier series is provided as follows.
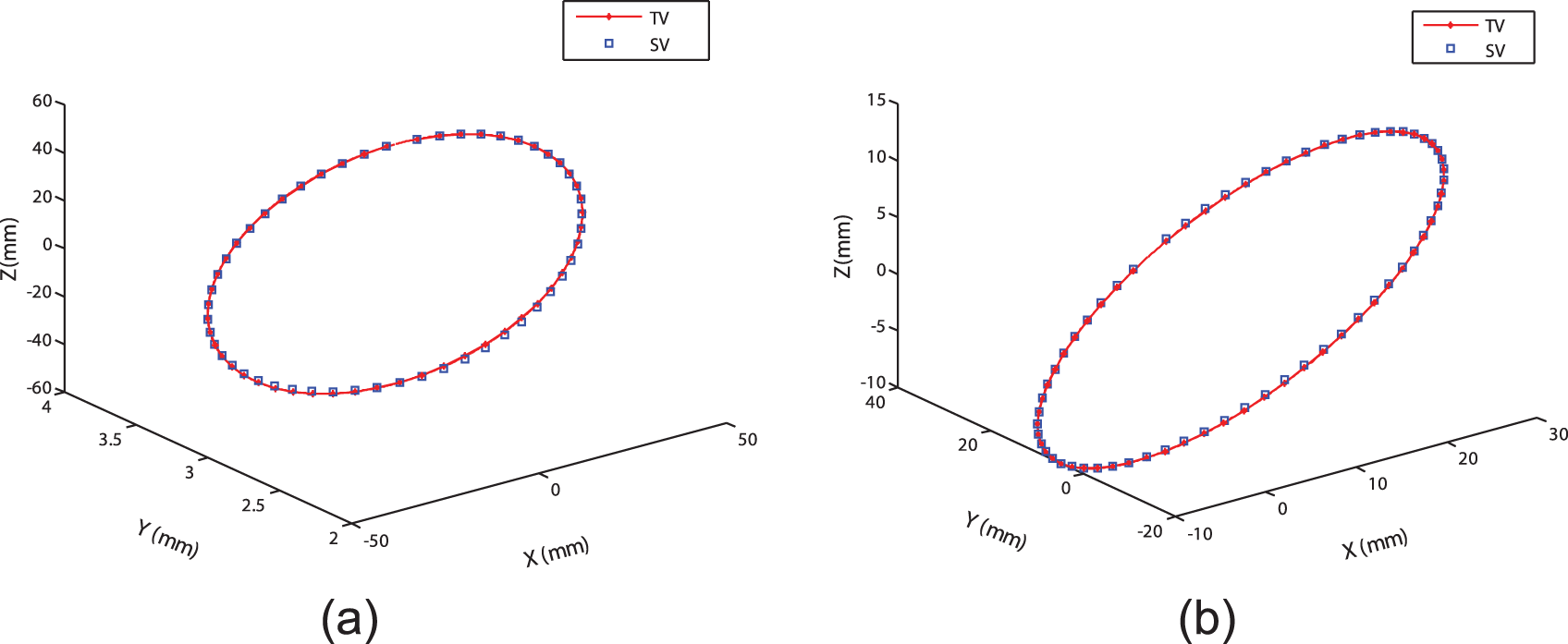
Evaluation of EHM in a circular path for (a) TBBP and (b) Stewart platform.

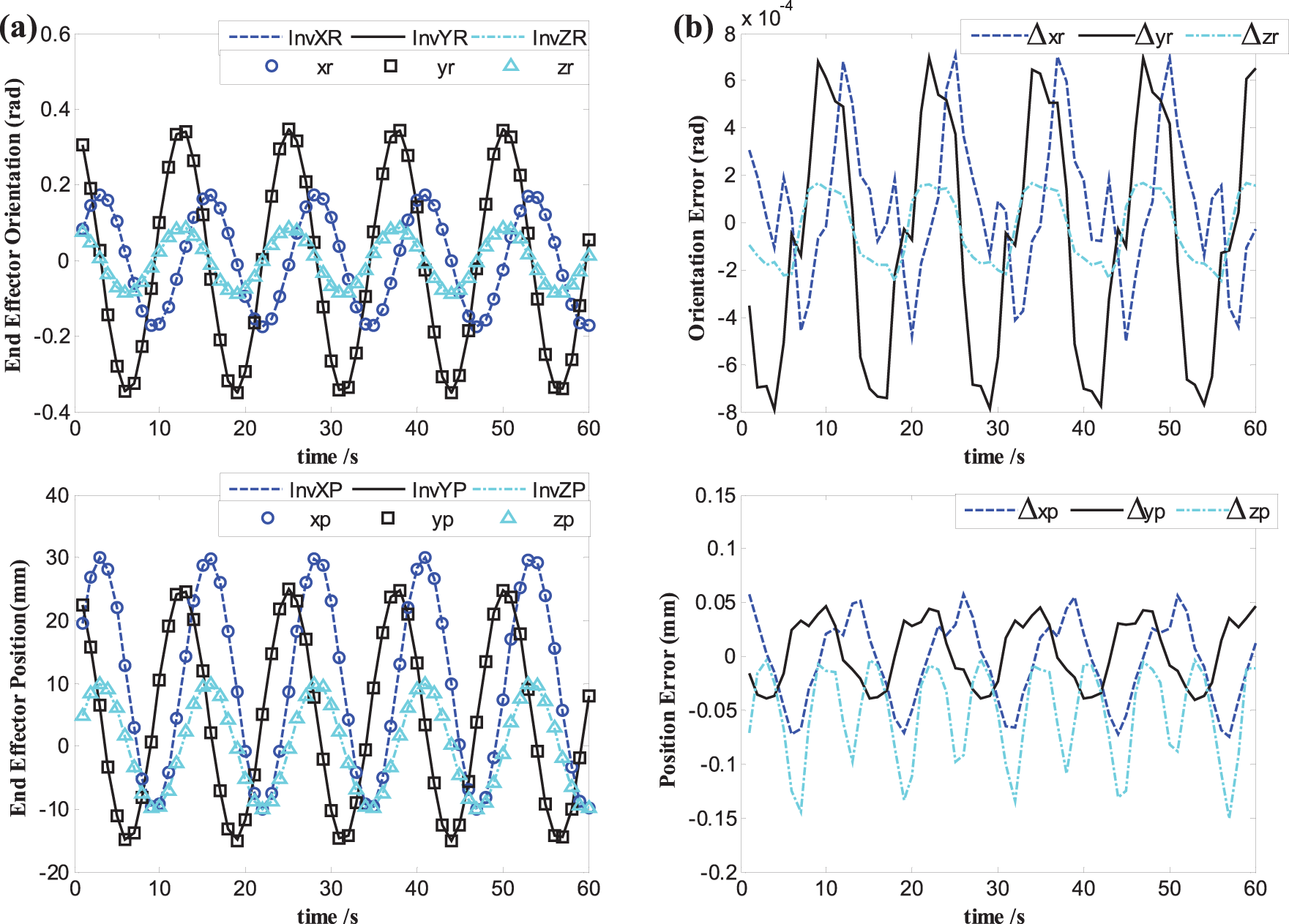
TBBP: comparison of the outputs of EHM with target trajectory. (a) End-effector orientation and its error and (b) end-effector position and its error.
Stewart platform: comparison of the outputs of EHM with target trajectory. (a) End-effector orientation and error and (b) end-effector position and error.
Offset identification based on Fourier series
When the hydraulic actuator has a periodic motion, the displacement function of the actuator can be described by a periodic function

where



where
When

The input signal of hydraulic actuator is always a trigonometric function without harmonics and with initial solution, and the initial solution represents the offset of the actuator.
20
So, the convergent Fourier series of

where

where
Bench test and results analysis
Given that the centroid of the moving platform moves on a circular trajectory
21
in the y = 3 plane around the origin of the coordinate system, additionally, all its three orientational degrees of freedom
Four cycles of TBBP’s desired trajectory can be discretized into 12,561 points and five cycles of Steward platform’s desired trajectory can be discretized into 15,701 points. FKP was solved for each point; the simulated value (SV) solved by the proposed method was compared with the theoretical value (TV). The results are shown in Figures 5 and 6. Detailed solutions of IKP are presented in section “Efficient method for solving the FKP of parallel robots.” Inv represents the target trajectory, and xp represents the calculated data using the EHM.
Figures 6 and 7 compare the EHM outputs from the solution of FKP22–25 with the target ones. The maximum absolute error of the angle around X-, Y-, and Z-axis is of the order of 10−3 units and its relative error is about 1.9%. The maximum absolute error of displacement along X-, Y-, and Z-axis is 0.174 mm and its relative error is about 3.4‰.
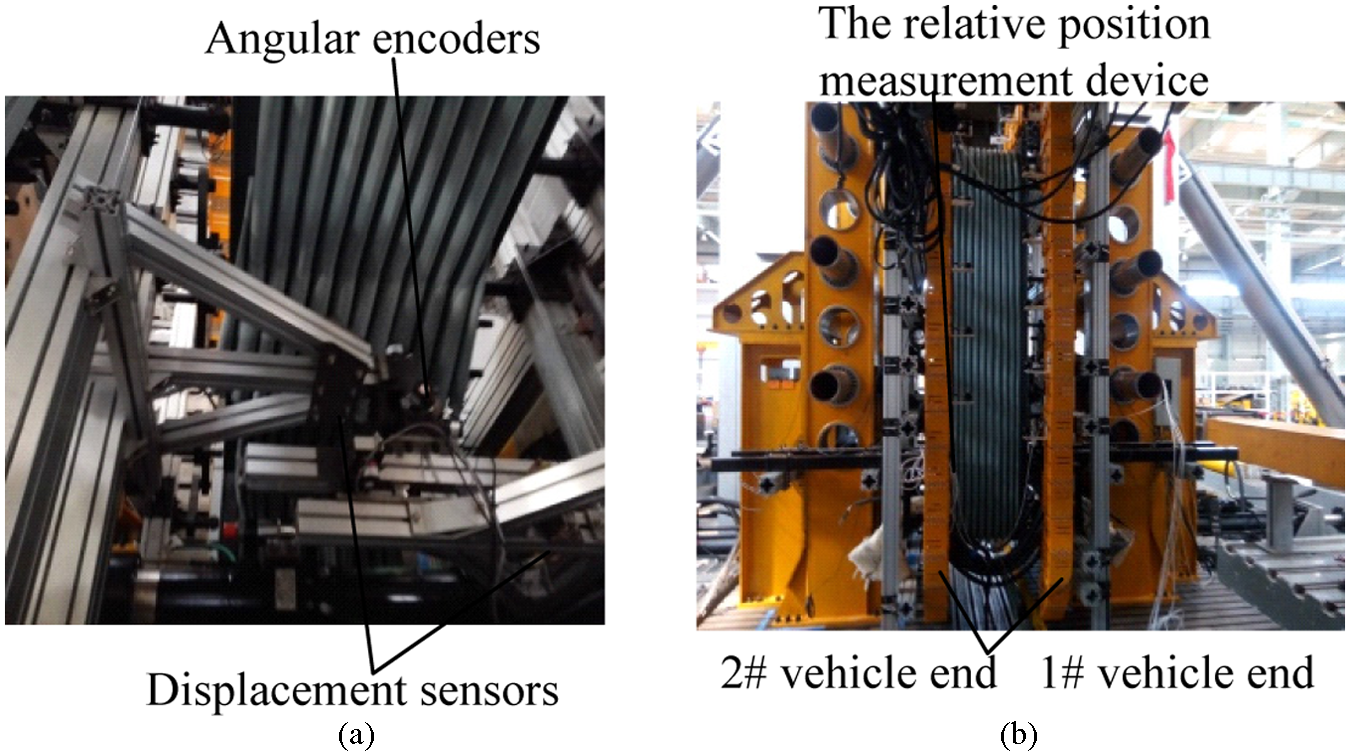
(a) Vehicle position measurement system and (b) test bench for bogie parameters.
The good agreement between calculated and target paths, as well as the small errors, highlights the excellent performance of the proposed method, which has been able to achieve such good accuracies. In the case of TBBP, absolute errors of orientation around X-, Y-, and Z-axis are less than 0.002706 rad and its relative error is about 1.9%, while the position errors along the same axis are all less than 0.174 mm with relative error about 3.4‰. For SP, absolute errors of orientation around X-, Y-, and Z-axis are all less than 0.0008 rad and relative error is about 2.3‰, while the position errors along the same axis are all less than 0.15 mm and its relative error is only 0.7%. The effectiveness of the proposed method is proved by running two typical trajectories on TBBP and SP, respectively.
To obtain higher accuracies, the high-order numerical algorithm should be adopted. On the basis of the similar initial guess acquired by the new method but using different iterative algorithm, Tables 1 and 2 compare the average number of iterations required by the NR method, the IHM, and EHM proposed in this article to achieve different levels of accuracy.
TBBP: average number of iterations and relative improvement of the proposed method.

TBBP: test bench for bogie parameters; IHM: improved hybrid method; EHM: efficient hybrid method.
Stewart platform: average number of iterations and relative improvement of the proposed method.

IHM: improved hybrid method; EHM: efficient hybrid method.
Clearly, with the increase in the required level of accuracy, the average number of iterations increases for all methods. By selecting any level of accuracy for analysis, the high-order iteration method requires a lower average number of iterations compared with the other methods. Especially in the case of SP, when accuracy level is 1, high-order iteration method reduces the average number of iterations up to 46.83% compared with IHM.
Regarding the obtained results, the convergence order of the numerical algorithm used in each method deemed as the decisive factor. Both the NR method and the IHM used the second-order and the third-order convergence NR algorithm, respectively, while EHM used a fifth-order convergence numerical algorithm. The difference between EHM, with better efficiency index, and other methods increases by increasing the level of accuracy. Therefore, fifth-order numerical algorithm is preferred in this article.
In the case of SP, each iteration of the NR algorithm takes about 0.8 ms, while each iteration of the fifth-order algorithm takes about 1.4 ms. These results are obtained by running the simulations on a PC with 3.6 GHz Quad-Core processor and 10 GB RAM. Note that with a different computer configuration, running time and calculation speed are different. From Table 2, with the increase in the accuracy level, EHM reduces the average number of iterations to solve the FKP up to 34.1% compared with IHM and up to 49.8% compared with the NR method. Based on the results of those simulations, it may be concluded that at higher accuracy levels, EHM achieves the target accuracy with less number of iterations and in shorter time.
To further verify the validity of the proposed method, an experimental measurement of the position of vehicle ends has been carried out. As Figure 7 shows, two adjacent vehicle ends are fixed onto the TBBP, meanwhile the relative position measurement device of vehicle ends is installed in the middle of the tight-lock vestibule diaphragms and includes two triangular frames. The two ends of the triangular frames are connected with the two vehicle ends, respectively. The 6-DOF parallel manipulator’s coupled motion was adopted to simulate the vehicle body moving along linear track, transition curve track, and circular tracks. Displacement sensors and the angular encoders collected the data related to relative position and orientation between the two vehicle ends during the test.
The relative position of the vehicle’s end calculated by the proposed method is compared with the measured actual ones by the measurement device. To verify the accuracy of the test, two cycles were carried out. Figure 8 shows that test results are in good agreement with the simulation results; CV is the theoretical value and MV is the measured value. The relative error representing the difference between the two displacements of 2# vehicle’s end relative to 1# vehicle’s end along Y1-axis is within 5.3%. When the train is moving at constant speed, the lateral relative motion of the adjacent vehicle’s ends greatly influences the performance of the train. In addition, the relative errors of the angles between X1-, Y1-, and, Z1-axis and between X2-, Y2-, and Z2-axis are within 5%. The relative motion between the two adjacent vehicle’s ends along longitudinal direction and vertical direction little influences the performance of the train. By using a sensor with high precision and minimizing the error of test device installation, the error of measuring device at the vehicle’s ends will also reduce and the measurement results will be more accurate. The proposed method is further validated and the demand of precision and real time are satisfied.

Displacements and angles of 2# vehicle’s end relative to 1# vehicle.
Conclusion
In this article, an EHM to reduce the duration of the forward kinematics analysis of parallel robots and to improve the accuracy of the solution is proposed. By the new method based on signal decomposition and reconstruction, an approximate solution of the FKP is generated. This solution is next taken as initial guess for the high-order numerical technique, which has been demonstrated having better efficiency index and solve the calculations with target level of accuracy.
To further verify the validity of the proposed method, two representative parallel robots, that is, SP and TBBP, are evaluated. The simulation results demonstrate that by comparing the EHM outputs with the target ones, the maximum absolute error of the angle around X-, Y-, and Z-axis is of the order of 10−3 units and its relative error is about 1.9%. The maximum absolute error of displacement along X-, Y-, and Z-axis is only 0.174 mm with relative error about 3.4‰. This method will reduce by 34.1% the required number of iterations to solve the FKP compared with IHM and up to 49.8% compared with the NR method. In both cases, the EHM method ensures a high level of accuracy of the solution. Using the TBBP, an experimental measurement of the position of vehicle’s ends has been carried out. The results show that the maximum relative error of the displacement of 2# vehicle’s end relative to 1# vehicle’s end along Y1-axis is about 5.3%. The proposed method is thus verified and shown to be capable of achieving the desired accuracy with less number of iterations and in shorter time. It should be noted that the proposed method is valid in general and may be applied to more complex robots.
Footnotes
Academic Editor: José Tenreiro Machado
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by the National Natural Science Foundation of China (grant nos 51205164 and 51478204).