
Abstract
In a low-altitude rescue operation, the safety and efficiency of the rescue can be guaranteed by adopting the conflict-avoidance mode of the collaboration type of flight rescue. In this article, we first introduce a protection zone model based on the visual flight separation standard, adopt resolution early warning time as a criterion, and divide the conflict into two modes, namely, two-aircraft (including fleet) and multiple-aircraft modes. Second, during each conflict mode, we distinguish different conflict scenarios based on the flight course of the conflict aircrafts and the tasks they carry out. Finally, we introduce a multi-agent system. We regard each aircraft as an independent agent that includes four modules. Each agent decides its own conflict resolution sequence based on the priority rules. By combining the relative movement trend, we select resolution strategies, such as adjusting the aircraft to fly higher, veering it off-course, or adjusting its speed. Finally, we draw the conflict-free flight track. We create a collaboration type of flight conflict resolution under different rescue priorities. Simulation examples show that this method can realize correction of the flight track and guarantee the safety and high efficiency of aircrafts according to the initial rescue flight track and under rescue priority.
Keywords
Introduction
In our work on earthquake relief, countering with emergency rescue and sudden events, air rescue presents the characteristics of strong flexibility, quick response, no limitation by ground transportation, and so on. This rescue method is currently one of the most effective rescue means adopted by many developed countries worldwide. 1 During the implementation of low-altitude (below 1000 m) 2 rescue, the flight safety and efficiency of transportation should be considered. The free-flying operation mode is an efficient and safe operation mode. The Federal Aviation Administration implemented the Free Flight Program 1 in 1998 and has been planning the Next-Generation Air Transportation System (NGATS) 3 since 2005. These actions indicate a further development step toward free flight. In the NGATS system, a more flexible and intelligent air traffic control (ATC) system will be set up. Through several advanced technologies, the aviator can select a better flight route. However, in low-altitude rescue flight, many problems have to be addressed to achieve improved conflict resolution. These problems include the flight rules in initializing navigation, flight planning information, rescue flight environment, timeliness, and reliability. These areas entail relatively complex work. In low-altitude airspace, the topography is complex, and less equipment monitoring work is conducted in this space. Dead zones in terms of functionality exist. Effective monitoring via a ground radar is difficult to achieve. Hence, the method of guaranteeing the safe separation of aircrafts from the centralized control on the ground needs be changed to manage aviator and airborne equipment. We need aviators to make autonomous evasion of flight conflict and adopt a more distributed type of control. Many resolution methods to address free-flight conflict have been proposed in the academe. The earliest research result that has been recognized worldwide is the air traffic system separation standard proposed by Reich.4–6 The earliest aircraft collision risk model was established in the conflict analysis research area. In this model, collision between two aircrafts is considered equal to the collision between a particle and a cuboid. Since then, a large number of researchers have comprehensively discussed the uncertain factors that influence flight safety based on the model provided by Reich. They have conducted further study on the estimation of collision risk and have obtained safety protection areas with different shapes. For example, a cylinder-shaped protection area was proposed by Kuenz and Peinecke, 7 and an axiolitic-shaped protection area was presented by Menon et al. 8 With the above-mentioned aircraft collision risk model, three methods of research for flight conflict resolution technology have been established. The first method involves predetermining the means of resolution. 9 During the system design phase in this method, the conflict resolution scheme is set to correspond to several presupposed flight conflict scenarios. For example, the ground proximity warning system sends out a standard pull-up warning when flight conflict exists between an aircraft and the ground. However, it does not provide an optimized resolution operation strategy. The predetermined resolution method is simple, direct, and easy to operate. When an aviator is trained, he can reflexively carry out the conflict resolution operation when a flight conflict warning is received. However, this method is inapplicable to complex free-flight scenarios. The second one is the conflict resolution method based on a force field.10–12 In this method, each aircraft is assumed to be a charged particle. With the revised static electricity equation, the operation strategy for flight conflict resolution can be obtained. This method of solving the equation is simple, but sometimes, the result obtained is impractical. For example, it requires significant changes in aircraft speed and discontinuity exists. Hence, this method is not widely used at present. However, when this method is combined with the participation of humans and implemented in an interactive manner, the problems mentioned above can be solved. Matsuno 10 and Emami11,12 presented certain achievements on this aspect. The third method is based on the programming type of optimization method, such as mixed-integer linear programming,13–18 mixed-integer nonlinear programming,18,19 and dynamic optimization. 20 Other optimization methods include game theory, 21 genetic algorithm, 22 ant colony algorithm, 23 and branch-and-bound algorithm. 19
Compared with flight-route conflict detection and resolution under radar monitoring, real-time flight conflict detection and resolution under low-altitude rescue flight is more difficult to realize. Therefore, the motivation on the study has the following reasons. The first reason is the variety in conflict mode, such as conflict between two aircrafts and conflict among multiple aircrafts. In addition, rescue aircrafts usually fly in a formation. The scenario of conflict occurring during formation flying should also be considered. The multi-conflict type of situation makes conflict resolution highly complicated. The second reason is that low-altitude flight is a point-to-point visual flight. Hence, no air route for guidance exists, significant flight deviation could appear, and an adverse influence on real-time conflict detection could occur. The third reason is that a helicopter is generally utilized as the main rescue aircraft to carry out the rescue task. A helicopter has strong mobility, especially in the vertical direction. Frequent maneuvering occurs during the flight, and this increases the difficulty of conflict detection. At the same time, maneuverability could provide more options for conflict resolution. Under this type of distribution environment, the possibility of flight conflict increases as the utilization ratio of airspace increases. Multiple modes of integration and collaboration for rescue flight conflict resolution should be developed to solve these problems.
The main contributions of this article can be summarized as follows.
We set up a timing conflict protection area based on safe separation and early conflict warning timing along three dimensions of aircrafts.
By combining the prediction flight track of other aircrafts in this airspace, real-time flight conflict detection can be achieved.
Under qualified flight conflict conditions, we determine the conflict situation faced by an aircraft and implement the conflict resolution process. This procedure allows the aircraft to avoid conflict autonomously.
The rest of this article is organized as follows. Section “Division of conflict mode” introduces division of conflict and includes identifying the conflict mode based on early warning timing, two-aircraft conflict mode, and multi-aircraft conflict mode; section “Detection of flight conflict” proposes detection of flight conflict; section “Real-time flight conflict resolution based on the multi-agent system” establishes real-time flight conflict resolution based on the multi-agent system; section “Computational instances and analysis” presents the simulation and data analysis results; Finally, section “Conclusion” concludes and suggests areas for further work.
Division of conflict mode
Traffic Collision Avoidance System (TCAS) 24 provides that some pilots have been unsure how to act when their aircraft was requested to climb while flying at their maximum altitude. The accepted procedure is to follow the climb resolution advisory (RA) as best as possible, temporarily trading speed for height. The climb RA should quickly finish. In the event of a stall warning, the stall warning would take priority. We used the TCAS for reference and adopted the conflict mode based on early warning time; 24 we then determined the mode of conflict resolution. As shown in Figure 1, basically, two-aircraft conflict resolution, three-aircraft conflict resolution, four-aircraft conflict resolution, conflict resolution in a single-aircraft fleet, and conflict resolution between two fleets were involved. As for the single-aircraft and fleet forms, we established a rescue priority strategy individually and implemented conflict resolution. Double-aircraft conflict resolution was further divided into off-course resolution strategy under head-to-head flight, increasing height resolution strategy under cross flight, and off-course surpass resolution under catch-up flight. For the resolution strategy of three and four aircrafts, we can realize multi-aircraft resolution under the strategy of two-aircraft resolution based on the priority strategy.

Conflict resolution process of mode integration.
Identifying the conflict mode based on early warning timing
When conflict based on the prediction of the flight track is detected, the prediction track of three or more aircrafts could possibly be interlaced, as shown in Figure 2. In Figure 2(a), many two-aircraft conflicts exist in the track of three aircrafts. In Figure 2(b) and (c), aircraft A1 is in conflict with A2 and A3; however, no conflict exists between A2 and A3.
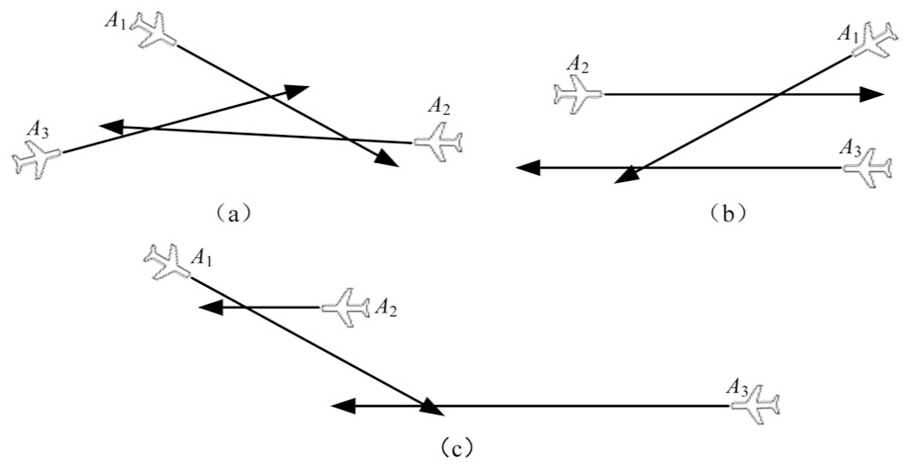
Conflicts among many aircrafts: (a) conflicts in the track of three aircrafts, (b) conflicts in parallel trajectory of opposite direction, and (c) conflicts in parallel trajectory of same direction.
Evidently, as the prediction track distance increases, the possibility of multi-aircraft conflict increases. Hence, the definition of two- or multi-aircraft conflict should be clarified. For example, we predict that an aircraft will be in conflict with two aircrafts in 20 or 300 s; this is only a judgment based on the prediction track, and it is a multi-aircraft conflict, as shown in Figure 2(c). However, in terms of timing, the time interval between the two conflicts is long. Aircraft A1 has sufficient time to implement resolution maneuvering with A2 and A3 successively. Hence, this scenario can be regarded as two-aircraft conflict, and the number of conflicts occurring among multiple aircrafts in the rescue airspace is reduced.
In this article, we referred to TCAS, 24 which is widely used in passenger aircrafts. We retained the early warning and decision-making time. 24 We defined conflicts with a time interval between two conflicts of less than 40 s as interlink conflicts, that is, aircraft A1 is in conflict with A2 at time t0 and is in conflict with A3 within the time range of (t0, t0 + 40 s). We judged A1, A2, and A3 as multiple aircrafts in conflict.
Two-aircraft conflict mode
Based on the number of times that aircrafts encounter conflict within a specific period, we can define conflict individually as two-aircraft and multi-aircraft conflict modes. Based on whether the conflict is concerned with aircraft formation, we can define the mode of two-aircraft conflict as two aircrafts in conflict and conflict with a fleet.
In this study, the two-aircraft conflict mode includes two types of conflict, namely, conflict between two aircrafts and conflict among fleets. A fleet can be regarded as a whole because their shape and size remain the same during flying; hence, we can regard two fleets in conflict as two-aircraft conflict.
Two tasks, namely, go around flying (GAF) and turn around flying (TAF), are usually carried out by aircrafts during low-altitude rescue. Based on their type, these tasks can be divided into transportation of wounded personnel (TWP), transportation of goods (TG), and information acquisition (IA). TG can be divided into fast-moving consumer goods (FMCG) and durable goods (DG).
Conflict between two aircrafts
According to the geometric relation in flight path and the relative movement relation among aircrafts, the conflict situation of aircrafts includes head-to-head, catch-up, cross, and pass-through-the-height conflicts.
Head-to-head conflict means that when two aircrafts make a reverse parallel flight based on a level flight path, the horizontal distance between the two aircrafts is less than the safety clearance, and the vertical distance is less than the safety clearance.
Catch-up conflict means that when two aircrafts make a same-direction parallel flight along a level flight path, the horizontal distance between the two aircrafts is less than the safety clearance, and the vertical distance is less than the safety clearance.
Cross conflict means that when two aircrafts make a flight along a cross flight path, the horizontal distance between the two aircrafts is less than the safety clearance, and the vertical distance is less than the safety clearance.
Passing-through-the-height conflict means that one level flight aircraft is in conflict with an aircraft that is at climbing/descending state or with two aircrafts that are at a climbing/descending state. It includes three types, namely, same flight path catch-up, same flight path head-to-head, and cross through the height, as shown in Figure 3.

Cross-through-the-height conflict.
Fleet flight conflict
The carrying capacity of a single aircraft is limited. During rescue operation, many aircrafts are usually dispatched and fly in a formation. By having tasks carried out by the fleet, rescue efficiency is guaranteed, airspace utilization is enhanced, and flight conflicts among many individual flying aircrafts are avoided.
Detection of fleet conflict is based on detecting two aircrafts’ conflict. We set the formation logo G (group) for aircrafts that fly in a formation in airspace. When the aircrafts in formation detect flying conflicts along the aircraft-planned flying track and the target aircraft prediction flying track, the formation type of the other party’s aircraft can be determined. By checking whether the conflict aircraft is in a formation, we can divide fleet conflict into two types. The first is formation flight aircraft in conflict with a single aircraft, as shown in Figure 4(a). The second one is conflict between two-aircraft formations, as shown in Figure 4(b). The scenario is defined as


Two types of fleet conflict: (a) conflict between aircraft formation and a single aircraft and (b) conflict between two aircraft formations.
Aircraft formation has five properties, as shown in Table 1.
Properties of rescue aircraft formation.

GAF: go around flying; TAF: turn around flying; TWP: transportation of wounded personnel; TG: transportation of goods; FMCG: fast-moving consumer goods; DG: durable goods.
Analysis of Table 1 shows that eight types of conflict scenarios exist for two-aircraft formation.

Multi-aircraft conflict mode
When defining an aircraft property, the flight process and task type are considered. Six types of aircrafts can carry out rescue operations, as shown in Table 2. Given that the aircraft that transports fast-moving consumer and DG unloads the goods at the rescue area and carries no load in its return, (GAF, DG) and (GAF, FMCG) can be combined as (TAF, TG). The aircraft that captures aerial photos only consumes fuel during the entire process, so the state of its back-and-forth travel can combine (GAF, IA) and (TAF, IA) as IA.
Properties of the rescue aircraft.

GAF: go around flying; TAF: turn around flying; TWP: transportation of wounded personnel; TG: transportation of goods; FMCG: fast-moving consumer goods; DG: durable goods.
Scenario of three-aircraft conflict
When flight conflict occurs among three aircrafts, in consideration of the six different properties of an aircraft, eight types of conflict combinations exist, as shown in Figure 5.

Scenario of three-aircraft conflict.
Analysis of Figure 5 shows that the different combinations of three-aircraft conflict are as follows:

Scenario of four-aircraft conflict
When flight conflict occurs among four aircrafts, in consideration of the six different properties of an aircraft, six types of conflict combinations exist, as shown in Figure 6.

Scenario of four-aircraft conflict.
Analysis of Figure 6 shows that the different combinations of four-aircraft conflict are as follows:

For a conflict scenario involving five aircrafts and more, the rules above are adopted, and the same analogy applies.
Detection of flight conflict
Assuming that all the aircrafts that participate in rescue are equipped with automatic dependent surveillance–broadcast (ADS-B) and each aircraft can broadcast its location, flight course, ground speed, rate of climb, and flight plan information to other aircrafts in airspace through the air-to-air data chain, each aircraft can predict the flight track of the other aircrafts based on the signal it receives. We should check the conflict in the spatial dimension by comparing the planned flight track of an aircraft with the prediction track of the target aircraft. If conflict exists, we check it in the time dimension targeted to the conflicting point. If the time windows when the two aircrafts arrive at the conflict point overlap each other, then the two aircrafts will have flight conflict at this point.
No standard and complete flight rules on rescue work exist under low altitudes. Hence, in this article, we established a flight conflict detection model based on the visual flight separation standard. 25 In this separation standard, the longitudinal separation between aircrafts with the same flight track and height and at visual flight is as follows: 5 km between aircrafts with indicated airspeed above 250 km/h and 2 km between aircrafts with indicated airspeed below 250 km/h. The vertical separation between aircrafts that fly at different heights should be over or equal to 300 m. In addition, when surpassing the aircraft in front or avoiding a head-on aircraft, the lateral separation should not be less than 500 m.
Assuming that aircrafts Ai and Aj are in the airspace and Ai is in a state of climbing up while Aj is in a state of level flight, the predicted individual flying tracks are Li and Lj.

Diagram of the conflict situation.
Solving the coordination of P is equal to solving the intersection point of segments
The current location points pi1 and pj1 of aircrafts Ai and Aj and flight planning time pi2 and pj2 should be transferred to the rectangular plane coordinate system from the latitude and longitude of the geodetic coordinate system. The direct formula for Gaussian projection is

where X represents the arc length of the meridian; B represents latitude; t = tan B; ρ″ is a constant 206,265, that is, the seconds corresponding to 1 radian;
The confirmation method for aircraft Ai and Aj passing through potential conflict point P time window is as follows.
Assuming that the minimum value of the longitudinal safety separation of an aircraft is Lmin, then the time window for Ai passing through point P is ti = [Ti − Lmin/vi, Ti]. The time window for Aj passing through point P is tj = [Tj − Lmin/vj, Tj]. vi and vj are the cruising speed of aircrafts Ai and Aj, respectively. According to the cruising speed of an aircraft, we set Lmin to 3 or 5 km.
According to the potential location of conflict and the time window when passing through the point, the conditions that cause the conflict between aircrafts Ai and Aj can be defined

Real-time flight conflict resolution based on the multi-agent system
Considering the inadequate ground ATC guidance during flying in rescue areas, negotiation, cooperation, and collaboration among all aircrafts are effective in solving flight conflict. The multi-agent system is a distribution-type collaboration method of conflict resolution. It regards a single aircraft as an intelligent agent; in a specific airspace, multiple aircrafts are combined as a multi-agent system.26,27 When an individual aircraft agent detects flight conflict, based on its own flight target timing, the resolution strategy and resolution priority of each aircraft jointly define the resolution track for each aircraft.
Aircraft agent module
The aircraft agent has four modules: aircraft information, flight conflict detection, negotiation and strategy, and resolution strategy generation. The four modules in the aircraft agent collaborate and autonomously avoid the dangers encountered in flight conflict, as shown in Figure 8. The function of each module is shown in the following.

Agent structure and interaction diagram.
Aircraft information module
The information for this module is inputted into the module before each flight. It includes information on whether the aircraft is in a formation, the task it carries out, flight information on going and turning around, and number of real-time conflicts encountered by the aircraft.
Flight conflict detection module
With ADS-B loaded on the aircraft, the aircraft agent can obtain the flight state and flight plan of other aircrafts in the rescue airspace, and the flight track can be predicted. By analyzing the predicted flight track, the agent can determine whether flight conflict objects exist. The number of potential conflicts can then be further determined depending on the existence of conflict between two aircrafts or conflict among many aircrafts.
Negotiation and strategy module
A temporary dialog among all aircrafts is set up by the agent concerned with conflict according to the information of all agent aircrafts, such as formation and task. The resolution priority among all aircrafts is negotiated and confirmed.
Resolution track generation module
Once the resolution priority of all aircrafts is confirmed, a resolution track is generated based on the priority sequence from high to low. Assuming that every two aircrafts are in conflict among Agent (1), Agent (2), and Agent (3) and that the resolution priority order is Agent (1) > Agent (2) > Agent (3), then Agent (1) retains its original track R1 as constant, Agent (2) maneuvering on track R2 performs avoidance in reference to Agent (1), and the resolution track R3 of Agent (3) is in conflict with R1 and R2. This scenario applies to the situation in which many conflicts exist among aircrafts.
Rule of resolution priority
The priority of each aircraft is decided by the task it carries out and the phases it stays in (whether it is going around or turning around). The priority of a single aircraft is lower than that of an aircraft formation. The priority of fleets is based on the scale of a fleet. If the scale is the similar, the priority is based on the tasks it carries out and the situation of going around and turning around.
Resolution priority for single-aircraft conflict
The general rules to determine the priority are as follows: the more urgent the rescue task is, the higher the priority is; the priority of a going-around aircraft is higher than that of a turning-around aircraft; and the priority of an aircraft with a low maneuvering function is higher than that of an aircraft with a high maneuvering function. Based on these rules, we provide the following discussion.
For an aircraft that is going around, because AGAF,TWP is at an empty loaded state, its maneuvering function is far better than that of a fully loaded aircraft. The aircraft can conveniently carry out resolution maneuvering, so we set the priority to lower than AGAF,DG and AGAF,FMCG.
Among aircrafts that undertake the transportation of relief goods, DG are transported by AGAF,DG and FMCG are transported by AGAF,FMCG. Given that the time sensitivity of DG is lower than that of FMCG, we set
In turning-around flight, aircraft ATAF,TWP is at a state of transporting wounded personnel. In consideration of the necessity of comfort for passengers and the urgency for curing the wounded, we set the priority of this task
Among AGAF,TWP, ATAF,TG, and AIA, the priority of AGAF,TWP is the highest because it undertakes the relief work for wounded personnel. AIA has a strong maneuvering function and is idle for a long time; it carries out detection work, so we set
Hence, the priority for each aircraft is as follows

Priority of fleet conflict resolution
For conflict scenario SG = {n = 2|G, A}, avoidance measures are implemented by a single aircraft while the fleet formation keeps flying following its original track. In terms of economy, the fuel consumed by a single aircraft during its resolution maneuvering operation is less than that of a formation aircraft. In terms of safety, the difficulty level when formation aircrafts perform integration resolution maneuvering is higher than that of a single aircraft.
When flight conflict occurs among aircraft fleets, the small-scale fleet usually makes way for the large-scale fleet. If the number of aircrafts in each of the two fleets is the same, the priority should be determined based on the relief task each fleet carries out and the flying state it stays in. By analyzing the different conflict scenarios mentioned above, we determined the priority

When carrying out conflict resolution, the formation with low priority should make way for the high-priority fleet.
Generation of conflict-free flying track
Three types of maneuvering are available for conflict avoidance. These three are adjusting height, off-course, and adjusting speed (Figure 9(a)–(c)).
Maneuvering of adjusting height. It pertains to the climbing or descending maneuvering flight of an aircraft within the same vertical plane while keeping the track angle unchanged. The equation of motion for an aircraft adjusting its height of maneuvering is

Maneuvering off-course. It involves changing the course of maneuvering flight of an aircraft within the same horizontal plane while keeping the flying height unchanged. With ΔΨ as the yaw angle, the equation of motion for an aircraft under off-course maneuvering is

Maneuvering of adjusting speed. It means that an aircraft accelerates or decelerates with a fixed acceleration speed while keeping the flying track on a straight line. The equation of motion for an aircraft adjusting its speed is


Three types of conflict resolution maneuvering: (a) adjusting height, (b) off-course, and (c) adjusting speed.
In equations (4)–(6), p(t) represents an aircraft’s current location,
The conflict detection module of the aircraft agent can detect conflict between two aircrafts and among many aircrafts or fleets based on the conflict information.
After negotiation among aircraft agents, the resolution sequence is fixed. The resolution track generation module of the low-priority party integrates the conflict state, predicted conflict location, its own task, and the three types of information to determine the resolution maneuvering method.
When flying over the predicted conflict point and when conflict resolution condition equation (7) or (8) is satisfied, the aircraft completes conflict resolution and goes back to the original track to fly


Resolution strategy for two-aircraft conflict
πi and πj represent the priority of Agent (i) and Agent (j), respectively.
By integrating the relative movement situation and task property of two aircrafts, the resolution module selects the optimal resolution maneuvering.
Head-to-head conflict between two aircrafts.
According to the rules of avoidance during visual flying, Agent (j) needs to veer off-course rightward, as shown in Figure 10. P is the predicted conflict point. When the distance between this point and Agent (j) is Dlong, that is, the longitudinal safety clearance, Agent (j) begins to veer off-course. TCP1, TCP2, TCP3, and TCP4 are track change points during the resolution course.
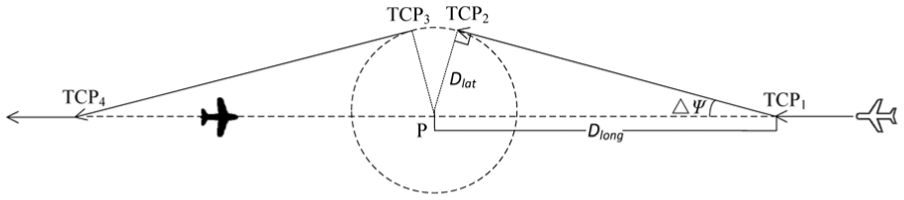
Diagram of off-course resolution track.
Longitudinal safety clearance is represented by Dlong, lateral safety clearance is represented by Dlat, vi and vj are the ground speeds of Agent (i) and Agent (j), and Dij represents the distance between the two aircrafts at the beginning of the resolution.
Off-course leg TCP1 → TCP2: TCP1 corresponds to the beginning time t1 of the resolution. We set the optimal off-course angle to ΔΨ, and the time needed for minimum Dlat from off-course to being parallel to the two aircrafts is

From the geometrical relation among the optimal resolution track, Dlong, and Dlat, we obtain

Then, the optimal resolution off-course angle is

By incorporating the value of ΔΨ into the off-course maneuvering equation (5), we obtained the resolution track of leg TCP1 → TCP2.
Cornering leg TCP2 → TCP3: TCP2 corresponds to cornering beginning time t2. We set the coordination of P, TCP2, and TCP3 to (x0, y0), (x2, y2), and (x3, y3), respectively, according to the law of uniform circular motion. We have

(xt, yt, zt) is the coordination of Agent (j) at time t, and the turning rate is ω (°/s). Then, the TCP2 → TCP3 flying track is

When the course change value of Agent (j) is 2ΔΨ, it is entered into the next course of flight.
Turning-around leg TCP3 → TCP4: TCP3 corresponds to the end time of cornering t3. The track is similar to TCP1 → TCP2, and the flying track of aircraft Agent (j) in this leg is

After flying for about t times (similar to equation (9)), the aircrafts veer off-course rightward for an angle of about ΔΨ, resume their original track, and complete the conflict engagement.
2. Cross conflict occurring between two aircrafts.
According to the rules of avoidance in visual flying, the aircraft on the left side of the conflict point should climb and the aircraft on the right side of the conflict point should descend to avoid flight conflict. In a situation in which cross conflict exists between aircraft Agent (i) and Agent (j) and Agent (j) is at the left side of the conflict point, then Agent (j) should adopt the conflict resolution strategy of climbing. As shown in Figure 11, P is the predicted conflict point. When the distance between Agent (j) and point P is Dlong, the aircraft begins to climb. TCP1, TCP2, and TCP3 represent track-changing points during the resolution process. H represents the vertical safety clearance.

Diagram of adjusting the height resolution track.
Climbing leg TCP1 → TCP2: p1(x1, y1, z1) is the coordination of aircraft Agent (j) at TCP1. Its speed is v, and the time needed for resolution is

The resolution maneuvering climbing rate is

The flying track of TCP1 → TCP2 refers to equation (4).
Returning around leg TCP2 → TCP3: When Agent (j) climbs to above P at a ground speed of vj, Agent (i) has already flown over the predicted conflict point P. Agent (j) can be transferred to a descending mode and back to its original track. The flying track of TCP2 → TCP3 is

After a period of
3. Catch-up conflict between two aircrafts.
According to the rules of avoidance in visual flying, Agent (j) should veer off-course rightward, surpassing the aircraft in the front, as shown in Figure 12. TCP1, TCP2, TCP3, and TCP4 are the track change points during the engagement process.

Diagram of off-course surpassing track.
Off-course leg TCP1 → TCP2: The time of this leg is

because

Introducing equation (18) into the above formula yields

By introducing ΔΨ into the off-course maneuvering equation (5), the track of aircraft Agent (j) in leg of TCP1 → TCP2 is obtained.
Parallel leg TCP2 → TCP3: The function of this leg lies in surpassing Agent (i) under the condition of guaranteeing safety clearance. When longitudinal safety clearance is satisfied, the aircraft returns to its original track. By setting the corresponding time of TCP2 to t2, the equation of motion of this leg is

Returning leg TCP3 → TCP4: When the distance between aircraft Agent (i) and Agent (j) is satisfactory, the corresponding time of TCP3 is set to t3. Then, the equation of motion of this leg is

The value of ΔΨ can be calculated with equation (20).
4. When conflict between two aircrafts occurs during high flying, Agent (j) is at a state of level flight. We can select the resolution strategy according to the geometry relation of the track of the two aircrafts. When head-to-head conflict exists among same-track aircrafts, Agent (j) conducts off-course maneuvering. When catch-up conflict exists among same-track aircrafts, Agent (j) conducts off-course surpassing maneuvering. When cross conflict exists, such as when Agent (i) is higher than the predicted conflict point, Agent (j) conducts descending and adjusting height maneuvering; otherwise, Agent (j) conducts climbing and adjusting height maneuvering.
When Agent (j) is at a state of climbing/descending, the speed is adjusted to disengage the conflict. By setting the time window for Agent (i) passing through the conflict point as


that is, the acceleration speed a of Agent (j) should meet a > a1 or a < a2. By inputting a1 and a2 into the speed adjustment maneuvering formula, we can determine that Agent (j) passes through the conflict point earlier than Agent (i) and later than the track of Agent (i) passing through the conflict point.
Resolution strategy for fleet conflict
Fleet conflict involves eight scenarios. In SG1, SG4, and SG7,
Resolution strategy for multi-fleet conflict
Under the situation of conflict among multi-aircrafts, all the aircraft agents concerned should negotiate and confirm the respective resolution sequence based on their own resolution priority. If conflicts exist among Agent (h), Agent (i), Agent (j), and Agent (k) in the airspace and the priority is lower one by one, then the conflict resolution sequence is as follows: Agent (i) that has the highest priority should keep flying in its original track, Agent (j) with the second highest priority only needs to calculate the conflict-free track with Agent (i), Agent (j) should consider the conflict-free track with Agent (h) and Agent (i), and for the lowest priority Agent (k), we need to calculate the conflict-free flying track with Agent (h), Agent (i), and Agent (j) one by one.
Computational instances and analysis
We assume that in rescue airspace, we have going-around fleet GGAF,DG carrying out the transportation of DG, turning-around fleet GTAF,TG carrying materials, turning-around fleet ATAF,TWP transporting the wounded, and disaster detection aircraft AIA, as shown in Figure 13. According to the description above, the resolution priority from high to low are GGAF,DG, GTAF,TG, ATAF,TWP, and AIA. Assuming that the ground speeds of GGAF,DG, GTAF,TG, ATAF,TWP, and AIA are 77.75 knots (40 m/s), 97.19 knots (50 m/s), 106.91 knots (55 m/s), and 136.10 knots (70 m/s), respectively, the track angles are 270°,150°, 80°, and 210°, respectively. GGAF,DG, GTAF,TG, and ATAF,TWP conduct flying at the height of 2952.76 ft (900 m). AIA descends starting from the height of 5249.34 ft (1600 m), and the descending speed rate is 19.44 knots (10 m/s). Their initial parameters and coordination are shown in Tables 3 and 4.
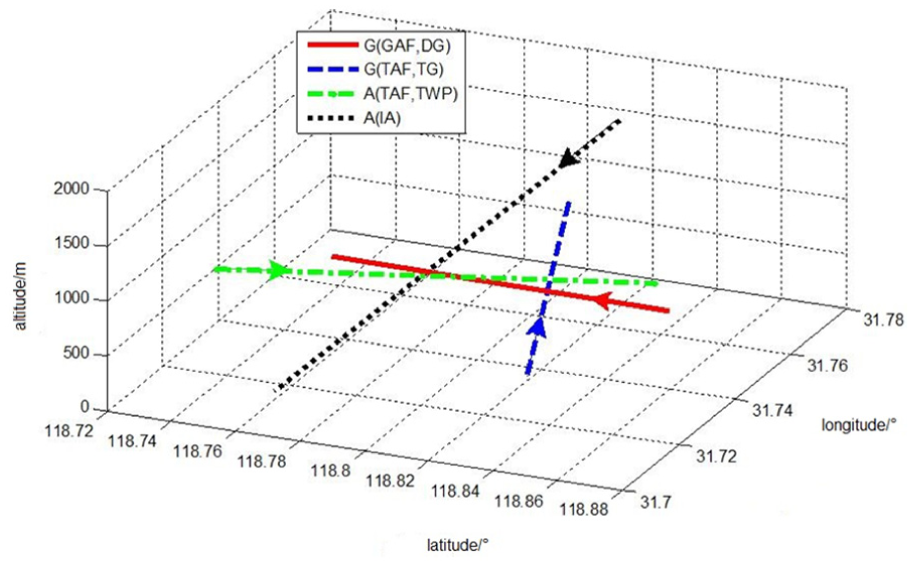
Diagram of planned flight track.
Initial parameters of aircrafts.

Initial coordination value.

A total of six intersection points exist in the track of aircrafts ATAF,TWP and AIA and fleets GGAF,DG and GTAF,TG. These points result in six potential conflicts, as shown in Figure 14. The coordination of each point is listed in Table 5.
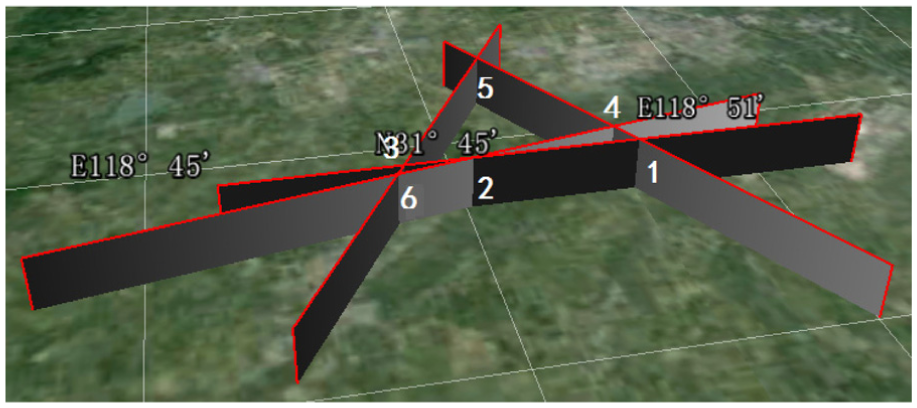
Diagram of the intersection points of the track.
Coordination of the intersection points of the track.

Once each aircraft agent has detected multi-aircraft conflicts, it will judge the priority as GGAF,DG > GTAF,TG > ATAF,TWP > AIA based on the relief tasks that each aircraft or fleet carries out. After the negotiation, the resolution sequence is GGAF,DG, GTAF,TG, ATAF,TWP, and AIA. The detailed resolution scheme is (1) GGAF,DG keeps flying in its original planned track and (2) GTAF,TG disengages from its track.
Intersection 1 exists for the tracks of GGAF,DG and GTAF,TG. Moreover, they have the same flying height of 2952.76 ft (900 m). From the spatial view, we can see that conflict exists.
Furthermore, the arrival time window of GGAF,DG is [41.19, 91.19], the arrival time window of GTAF,TG is [47.98, 87.98], and the intersection of the two is not empty. Hence, intersection point 1 is the predicted conflict point of GGAF,DG and GTAF,TG, and avoidance measures should be adopted by GTAF,TG. According to the rules of lowering the aircraft flying height for the aircraft located at the right side (viewed by the direction of forward motion) of the conflict point, GTAF,TG should conduct descending maneuvering.
Given that the minimum value of longitudinal safety clearance is 1.08 nautical mile (2 km), the coordination of the starting point of the descending leg of TCP1 → TCP2 is (3,514,472.492, 501,066.701). The corresponding longitude and latitude are (3,514,472.492, 501,066.701), the flying time is 39.55 s, and the descending rate is 14.73 knots (7.58 m/s). The renewed location formula for this phase is

The flight duration of turning-around leg TCP2 → TCP3 is the same, that is, 39.55 s, with a climbing rate of 14.73 knots (7.58 m/s). The flying track of this leg is

3. Resolution track of ATAF,TWP.
ATAF,TWP, which is in the third place in the resolution sequence, has an intersection point with the tracks of GGAF,DG, GTAF,TG, and AIA. However, its priority is higher than that of AIA. Hence, we only need to check whether it has conflicts with GGAF,DG and GTAF,TG. From the spatial view, points 2 and 4 are the potential conflict points for ATAF,TWP and GGAF,DG, GTAF,TG, respectively. The time window for ATAF,TWP arrival at point 2 is [80.40, 116.76]; for GGAF,DG, it is [45.84, 95.84]. Hence, conflict exists. Given that it is a cross conflict and ATAF,TWP is at the left side of conflict point 2, ATAF,TWP needs to perform climbing maneuvering.
Considering that the minimum value of longitudinal safety clearance is 6561.68 ft (2 km), the coordination of the starting point of the climbing leg of TCP1 → TCP2 is (3,511,937.736, 497,792.890). The corresponding longitude and latitude are (31°43′46.75″N, 118°46′49.12″E), the climbing duration is 36.77 s, and the climbing rate is 15.84 knots (8.15 m/s). We set the time corresponding to TCP1 as t1. The equation of motion of this climbing leg is

The flying duration for turning-around leg TCP2 → TCP3 is the same, that is, 36.77 s, and the descending rate is 15.84 knots (8.15 m/s). We set the time corresponding to TCP2 as t2. The flying track of this leg is

The tracks of ATAF,TWP and GTAF,TG share a common point 4. Given that GTAF,TG has performed descending maneuvering, the resolution track between ATAF,TWP and GTAF,TG is needed for conflict detection. GTAF,TG arrives at intersection point 4 along the resolution track, the height of which is 2227.36 ft (678.9 m). When ATAF,TWP arrives at the point, it has completed the resolution with GGAF,DG and resumed to a state of level flight. Hence, the height difference is 725.39 ft (221.1 m), which is less than the vertical safety clearance. Next, we judge the time window by considering the resolution track. The time window for ATAF,TWP arriving at point 4 is [124.17, 160.54], and the time window for GTAF,TG arriving at point 4 is [38.17, 78.0]. The intersection of the time window is empty, so no conflict exists within the resolution tracks of ATAF,TWP and GTAF,TG.
4. Resolution track of AIA.
AIA’s priority is the lowest among the others. In the resolution track of AIA, conflicts with GGAF,DG, GTAF,TG, and ATAF,TWP should be avoided. The track of AIA has intersection points of 3, 5, and 6 with GGAF,DG, GTAF,TG, and ATAF,TWP, respectively, and the first point being passed is point 5. The coordination of this point is (3,515,402.957, 500,548.171), the corresponding longitude and altitude are (31°45′39.26″N, 118°48′33.79″E), and the height where AIA stays at an intersection point 5 is 4586.84 ft (1398.07 m). The height difference with GTAF,TG is 1634.09 ft (498.07 m), which meets with the requirement of vertical clearance. When AIA arrives at intersection point 3, the height of which is 2905.02 ft (885.45 m), the height difference with GGAF,DG is 47.74 ft (14.55 m). Conflict exists from the spatial aspect. The arrival time window of AIA is [42.88, 71.46], and the arrival time window of GGAF,DG is [106.75, 156.75]. Given that no intersection exists between the two time windows, no conflict occurs. When AIA arrives at intersection point 6, the height difference with ATAF,TWP is 169.75 ft (51.74 m), and conflict exists from the spatial aspect. The arrival time window of AIA arriving is [46.60, 75.17], and the arrival time window of ATAF,TWP arriving is [58.85, 95.22]. Conflict exists.
Given that AIA is at a state of descending, we can select the mode of adjusting speed for conflict resolution. With the earliest arrival time of ATAF,TWP as the boundary, that is,


that is, when AIA makes an accelerating movement at the acceleration speed of over 0.67 m/s2, it goes through conflict point 6 prior to ATAF,TWP; when AIA makes a negative acceleration movement at the acceleration speed of over 0.31 m/s2, it goes through conflict point 6 later than ATAF,TWP. The resolution strategy and parameters of resolution strategy for each aircraft are shown in Tables 6 and 7, and the resolution track is shown in Figure 15.
Resolution strategy for each aircraft and effect of flight delay in multi-fleet conflicts.

Parameters of resolution strategy for each aircraft.


Diagram of the resolution track.
From the above example, we can see that flight conflict resolution plan based on priority can availably avoid the risk of flight conflict. The formation flights have corresponding priority to ensure flight safety. The simulation calculation of this case takes only 0.81 s to start to escape in computer with Intel Pentium dual-core 2.9 GHz, Windows 7. Therefore, in complex relationships of flight conflict resolution, according to TCAS which defined the conflicts with a time interval between two conflicts of less than 40 s as interlink conflict, for the speed of helicopter in low altitude from 250 to 350 km/h, the flight conflict resolution of multi-aircraft was realized in the condition of different conflict scenarios.
Conclusion
In this study, we regarded resolution early warning time as the baseline and divided the conflict into two modes: two-aircraft (including fleets) and multi-aircraft modes. We defined different conflict scenarios based on the flying course of the aircrafts and the tasks being carried out by the aircrafts. From the aspect of disengaging conflicts, we introduced the multi-agent system. In this system, each aircraft is viewed as an independent agent that includes four modules, and each agent determines its own conflict resolution sequence based on the priority rules. By combining the relative movement situation, we selected different strategies, such as adjusting the altitude, veering off-course, and adjusting the speed. Hence, a conflict-free flying track was generated, and a collaboration method of flight conflict resolution was realized.
We only established resolution according to the priority of each task and did not consider the total cost, such as total fuel consumption and off-course distance. This disregard may cause the aircraft with a low priority to perform too much maneuvering. In addition, when many aircrafts are involved in a conflict, adverse factors may be enhanced. Hence, for further study, we can select other means of intelligent resolution to realize three-dimensional (3D) flight conflict resolution.
Footnotes
Academic Editor: Murat Uzam
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This study was supported by the National Science Foundation of China (nos U1633119 and 71271113) and the Fundamental Research Funds for the Central Universities (no. NS2016062).